把极点拉向无穷远处。
图像校正 (Rectified Images)
校正 后
立体匹配 (Stereo match)
选取何种匹配基元进行匹配?
两种主要的方法
特征匹配 稠密匹配
特征匹配 (Feature match)
常用特征
边缘 线 (长度、方向、平均对比度) 角点
匹配算法
在立体图对中抽取特征 定义相似度 利用相似度和极线几何寻找匹配
数字图像处理双目立体 视觉ppt演示文稿
优选数字图像处理双目 立体视觉ppt
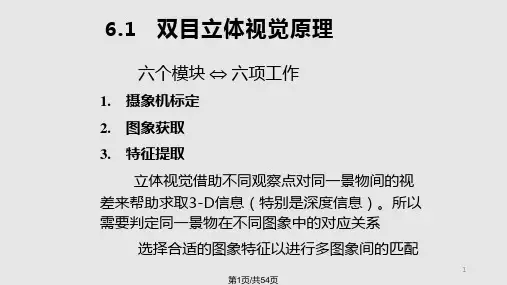
内容(Contents)
极线几何 Essential矩阵、fundamental矩阵 弱标定 立体重建(视差、双目匹配) 多个摄像机 结构光 时空立体光条 距离(range)数据 实例:视差与三维图 最新进展(运动提取等) 进一步学习材料
3D的信息可以通过2D的图像计算出来
视差(Disparity),深度(Depth)信息等等。
为什么需要两个眼睛?
物体的深度信息不能通过单眼所获得。
为什么需要两个眼睛?
物体的深度信息可 以通过双眼的观察 得到。
双目立体视觉三维测量原理(Triangulation)
双目立体视觉三维 测量是基于视差原 理。
目的:规范化极线 约束中的极线分布, 使得匹配效率得到 进一步的提高。
校正后的图像不需 要求极线方程,因 为相对应的匹配点 在图像相对应的扫 描线(Scan-line)上。
图像校正 (Rectified Images)
在校正图像中所有极线都平行
图像校正 (Rectified Images)
Programming), 最大流(Max-flow), 图像分割(graph-cut), etc.