(完整版)雷达系统原理框图及编程思想
- 格式:doc
- 大小:226.01 KB
- 文档页数:7
雷达原理及测试方案1雷达组成和测量原理雷达(Radar)是RadioDetectionandRanging的缩写,原意“无线电探测和测距”,即用无线电方法发现目标并测定它们在空间的位置。
现代雷达的任务不仅是测量目标的距离、方位和仰角,而且还包括测量目标速度,以及从目标回波中获取更多有关目标的信息。
1.1雷达组成1.2雷达测量原理1)目标斜距的测量图3雷达接收时域波形在雷达系统测试中需要测试雷达到目标的距离和目标速度,雷达到目标的距离是由电磁波从发射到接收所需的时间来确定,雷达接收波形参见图3,雷达到达目标的距离R为:R=0.5×c×tr式(2)式中c=3×108m/s,tr为来回传播时间2)目标角位置的测量目标角指方位角或仰角,这两个角位置基本上是利用天线的方向性来实现。
雷达天线将电磁能汇集在窄波束内,当天线对准目标时,回波信号最强。
回波的角位置还可以用测量两个分离接收天线收到信号的相位差来决定。
3)4)max t e min式中Pt 为发射机功率,G为天线增益,Ae为天线有效接收面积,σ为雷达回波功率截面积,Smin为雷达最小可探测信号。
雷达方程可以正确反映雷达各参数对其检测能力影响的程度,不能充分反映实际雷达的性能。
因为许多影响作用距离的环境和实际因素在方程中没有包括。
1.4雷达分类军用雷达主要分类:不能满足复杂雷达信号测试需求。
更为重要的是,雷达在实际工作过程中接收到的信号并不是纯净的发射回波,它包含各种杂波和多普勒效应,特别是在地形复杂或海面各种时,接收机接收到的杂波比需要探测的物体回波大的多,而这一切目前没有通用测量设备来生成雷达接收机所接收到的实际波形。
因此各个雷达研制单位投入大量人力、物力研制各种雷达模拟器,但这些模拟器往往受各种设计因素影响,只是实际雷达波形的简化,并只考虑到典型的应用,对复杂的应用环境无法模拟。
这样无法及时发现雷达研制和使用过程中问题和隐患。
雷达原理与系统(必修)知识要点整理第一章:1、雷达基本工作原理框图认知。
2、雷达面临的四大威胁3、距离和延时对应关系4、速度与多普勒关系(径向速度与线速度)5、距离分辨力,角分辨力6、基本雷达方程(物理过程,各参数意义,相互关系,基本推导)7、雷达的基本组成(几个主要部分),及各部分作用第二章雷达发射机1、单级振荡与主振放大式发射机区别2、基本任务和组成框图3、峰值功率、平均功率,工作比(占空比),脉宽、PRI(Tr),PRF(fr)的关系。
第三章接收机1、超外差技术和超外差接收机基本结构(关键在混频)2、灵敏度的定义,识别系数定义3、接收机动态范围的定义4、额定噪声功率N=KTB N、噪声系数计算及其物理意义5、级联电路的噪声系数计算6、习题7、AGC,AFC,STC的含意和作用第四章显示器1、雷达显示器类型及其坐标含义;2、A型、B型、P型、J型第五章作用距离1、雷达作用距离方程,多种形式,各参数意义,PX=?Rmax=?(灵敏度表示的、检测因子表示的等)2、增益G和雷达截面A的关系2、雷达目标截面积定义3、习题4、最小可检测信噪比、检测因子表示的距离方程5、奈曼皮尔逊准则的定义6、虚警概率、检测概率、信噪比三者关系,习题.(会看图查数)由概率分布函数、门限积分区间表示的各种概率形式;7、为什么要积累,相参积累与非相参积累对信噪比改善如何,相参M~M倍。
8、积累对作用距离的改善,(方程、结论、习题)9、大气折射原因、直视距离计算(注意单位Km还是m)10、二次雷达方程、习题。
11、分贝表示的雷达方程,计算、习题,普通雷达方程的计算。
第六章距离测量1、R,tr,距离分辨力、脉宽、带宽关系2、最短作用距离、最大不模糊距离与脉宽、重频关系3、双重频判距离模糊、习题。
4、调频连续波测距原理,(距离到频率的转换,简单推导),测速。
5、相位差与距离的关系6、习题第七章测角1、相位测角原理(路程差与相位差的相互补偿)2、三天线测角原理、习题。
雷达的组成及其原理课程名称:现代阵列并行信号处理技术姓名:杜凯洋学号: 2015010904025教师:王文钦教授一.简介雷达( Radar,即 radio detecting and ranging),意为无线电搜索和测距。
它是运用各种无线电定位方法,探测、识别各种目标,测定目标坐标和其它情报的装置。
在现代军事和生产中,雷达的作用越来越显示其重要性,特别是第二次世界大战,英国空军和纳粹德国空军的“不列颠”空战,使雷达的重要性显露的非常清楚。
雷达由天线系统、发射装置、接收装置、防干扰设备、显示器、信号处理器、电源等组成。
其中,天线是雷达实现大空域、多功能、多目标的技术关键之一;信号处理器是雷达具有多功能能力的核心组件之雷达种类很多,可按多种方法分类:(1)按定位方法可分为:有源雷达、半有源雷达和无源雷达。
(2)按装设地点可分为;地面雷达、舰载雷达、航空雷达、卫星雷达等。
(3)按辐射种类可分为:脉冲雷达和连续波雷达。
(4)按工作被长波段可分:米波雷达、分米波雷达、厘米波雷达和其它波段雷达。
(5)按用途可分为:目标探测雷达、侦察雷达、武器控制雷达、飞行保障雷达、气象雷达、导航雷达等。
二.雷达的组成(一)概述1、天线:辐射能量和接收回波(单基地脉冲雷达),(天线形状,波束形状,扫描方式)。
2、收发开关:收发隔离。
3、发射机:直接振荡式(如磁控管振荡器),功率放大式(如主振放大式),(稳定,产生复杂波形,可相参处理)。
4、接收机:超外差,高频放大,混频,中频放大,检波,视频放大等。
(接收机部分也进行一些信号处理,如匹配滤波等),接收机中的检波器通常是包络检波,对于多普勒处理则采用相位检波器。
5、信号处理:消除不需要的信号及干扰而通过或加强由目标产生的回波信号,通常在检测判决之前完成( MTI,多普勒滤波器组,脉冲压缩),许多现代雷达也在检测判决之后完成。
6、显示器(终端):原始视频,或经过处理的信息。
7、同步设备(视频综合器):是雷达机的频率和时间标准(只有功率放大式(主振放大式)才有)。
雷达系统工作原理详解雷达(Radar)是一种利用电磁波进行目标探测和测距的技术。
雷达系统由发射器、接收器、天线系统以及信号处理器组成,它能够探测、跟踪和识别远距离目标,广泛应用于军事、航空、气象等领域。
本文将详细介绍雷达系统的工作原理。
一、雷达系统的基本原理雷达的工作原理基于电磁波的特性和相对论的时差测量原理。
雷达系统通过发射一束脉冲电磁波,并接收反射回来的波束,通过计算往返时间和电磁波的速度,就可以计算出目标距离。
1. 发射器雷达系统的发射器负责产生高频率的电磁波,并将其转化为脉冲信号。
发射器通常采用放大器和脉冲发生器的组合,通过调节脉冲宽度和重复频率,可以控制雷达系统的探测范围和分辨率。
2. 天线系统雷达系统的天线系统用于发射和接收电磁波。
发射时,天线将电磁波以指定的方向发送出去;接收时,天线会捕捉目标反射回来的信号,并将其传输到接收器。
天线的设计和构造很重要,它决定了雷达系统的发射功率、辐射方向以及接收信号的灵敏度。
3. 接收器雷达系统的接收器负责接收和放大由目标反射回来的信号。
接收器通常包括前置放大器、带通滤波器和检波器等组件,用于提取和放大目标信号,并将其转化为与目标距离成正比的电压或距离相关的数字信号。
4. 信号处理器雷达系统的信号处理器负责对接收到的信号进行处理和分析。
它会对信号进行滤波、降噪、时域和频域分析等操作,以提取目标的特征信息。
信号处理器还可以将目标信号与之前的雷达图像进行比对,从而实现目标的识别和跟踪。
二、雷达系统的探测原理雷达系统利用电磁波与目标的相互作用实现目标的探测和测距。
雷达发送的电磁波遇到目标时,会被目标反射、散射或折射。
根据反射的特点,可以得到以下几种雷达探测原理。
1. 相干雷达相干雷达利用目标对电磁波的散射和反射特性进行探测。
当电磁波与目标相互作用时,会引起电磁波的散射,目标散射回来的波束会被接收器接收到。
通过分析接收到的波束,可以确定目标的位置、速度以及形状等信息。

雷达原理及测试方案1 雷达组成和测量原理雷达(Radar)是Radio Detection and Ranging的缩写,原意“无线电探测和测距”,即用无线电方法发现目标并测定它们在空间的位置。
现代雷达的任务不仅是测量目标的距离、方位和仰角,而且还包括测量目标速度,以及从目标回波中获取更多有关目标的信息。
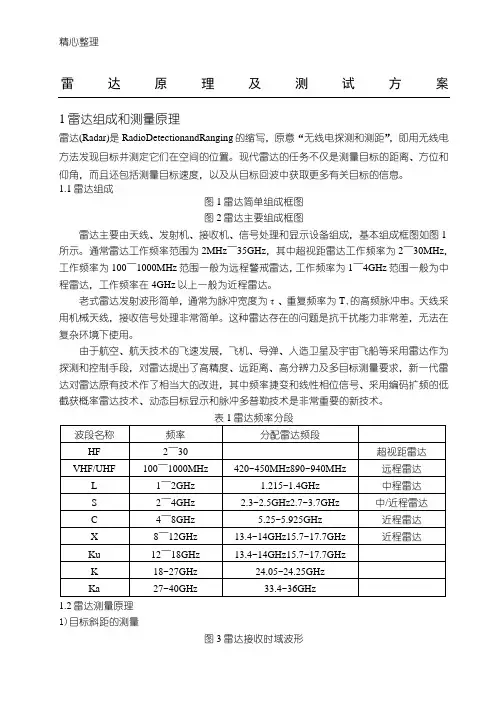
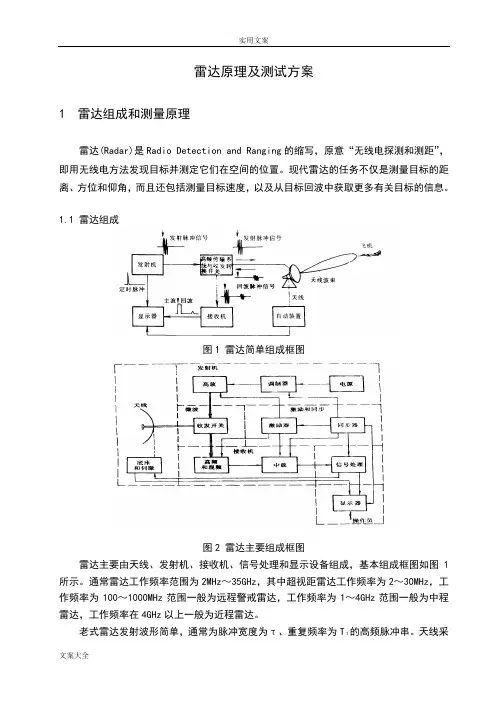
1.1 雷达组成图1 雷达简单组成框图图2 雷达主要组成框图雷达主要由天线、发射机、接收机、信号处理和显示设备组成,基本组成框图如图1所示。
通常雷达工作频率范围为2MHz~35GHz,其中超视距雷达工作频率为2~30MHz,工作频率为100~1000MHz范围一般为远程警戒雷达,工作频率为1~4GHz范围一般为中程雷达,工作频率在4GHz以上一般为近程雷达。
的高频脉冲串。
天线采老式雷达发射波形简单,通常为脉冲宽度为τ、重复频率为Tτ用机械天线,接收信号处理非常简单。
这种雷达存在的问题是抗干扰能力非常差,无法在复杂环境下使用。
由于航空、航天技术的飞速发展,飞机、导弹、人造卫星及宇宙飞船等采用雷达作为探测和控制手段,对雷达提出了高精度、远距离、高分辨力及多目标测量要求,新一代雷达对雷达原有技术作了相当大的改进,其中频率捷变和线性相位信号、采用编码扩频的低截获概率雷达技术、动态目标显示和脉冲多普勒技术是非常重要的新技术。
表1 雷达频率分段1.2 雷达测量原理1) 目标斜距的测量图3 雷达接收时域波形在雷达系统测试中需要测试雷达到目标的距离和目标速度,雷达到目标的距离是由电磁波从发射到接收所需的时间来确定,雷达接收波形参见图3,雷达到达目标的距离R为:式(2) R=0.5×c×tr为来回传播时间式中c=3×108m/s,tr2) 目标角位置的测量目标角指方位角或仰角,这两个角位置基本上是利用天线的方向性来实现。
雷达天线将电磁能汇集在窄波束内,当天线对准目标时,回波信号最强。
倒车雷达系统的组成和工作原理图解 - 汽车电气倒车雷达系统的组成倒车雷达系统又称驻车帮助系统。
在倒车过程中,假如在车辆要经过的路径上有障碍物,则停车距离把握系统会向驾驶员发出警告。
倒车雷达系统由倒车雷达ECU、倒车雷达蜂鸣器及数个(通常为4个)安装在(后)保险杠上的倒车雷达传感器等组成。
假如安装后摄像头,则会在导航屏上供应车辆后部区域的图像。
倒车雷达蜂鸣器通常安装在仪表板横梁的上部,靠近驾驶员侧,由螺栓固定。
有的则是安装在组合仪表内部,或者说是由仪表内部的报警蜂鸣器完成这一功能。
倒车雷达传感器俗称探头,安装在后保险杠上,包括左、左中、右中、右传感器,由外向内嵌入式安装,如下图所示。
各传感器的安装位置都有规定,不能装错,否则可能引起误报警。
工作原理倒车雷达系统就是利用超声波信号,经倒车雷达主机内微电脑的把握,再从探头的放射与接收信号过程中,比对信号折返时间而计算出障碍物距离,然后由报警器发出不同的报警声。
与障碍物的距离=发收时间差×声速/2。
当车辆挂到倒车挡时,倒车雷达ECU使用超声波传感器监控后保险杆四周的区域,假如监控区域内检测到物体,仪表组件内的声音报警装置就会发出声音警告。
系统能够探测到比较坚硬的固体障碍物同时也能探测到铁丝网和栅栏之类的物体。
侧面两个传感器的检测范围是距离保险杠拐角处60cm 的区域。
当障碍物接近某个后侧部区域时,从车辆侧后方150cm 开头可能赐予指示,如下图所示。
当探测到的距离在侧部小于20cm,或在中部正后方小于30cm时,声响信号将变为持续音以避开碰撞保险杠。
倒车雷达系统电路示例如下图所示,点火开关处于ON/START位置时,电流通过车身熔丝盒中熔丝F1,到倒车灯开关端子2。
当变速器操纵机构处于倒挡位置时,电流从倒车灯开关端子1 输出,到倒车雷达把握器端子1,为倒车雷达把握器供应电源。
倒车雷达系统电路▼①电流从倒车雷达把握器端子7 输出,到倒车雷达左传感器端子2,从倒车雷达左传感器端子1 接地,检测左侧是否存在障碍物。
第一章相控阵雷达系发射信号的设计与分析1.1 雷达工作原理雷达是Radar(RAdio Detection And Ranging)的音译词,意为“无线电检测和测距”,即利用无线电波来检测目标并测定目标的位置,这也是雷达设备在最初阶段的功能。
典型的雷达系统如图1.1,它主要由发射机,天线,接收机,数据处理,定时控制,显示等设备组成。
利用雷达可以获知目标的有无,目标斜距,目标角位置,目标相对速度等。
现代高分辨雷达扩展了原始雷达概念,使它具有对运动目标(飞机,导弹等)和区域目标(地面等)成像和识别的能力。
雷达的应用越来越广泛。
图1.1:简单脉冲雷达系统框图雷达发射机的任务是产生符合要求的雷达波形(Radar Waveform),然后经馈线和收发开关由发射天线辐射出去,遇到目标后,电磁波一部分反射,经接收天线和收发开关由接收机接收,对雷达回波信号做适当的处理就可以获知目标的相关信息。
假设理想点目标与雷达的相对距离为R,为了探测这个目标,雷达发射信号()s t,电磁波以光速C向四周传播,经过时间R后电磁波到达目标,照射到目标上的电磁波可写成:()R-。
s tC电磁波与目标相互作用,一部分电磁波被目标散射,被反射的电磁波为()Rσ⋅-,其中σ为目s tC标的雷达散射截面(Radar Cross Section ,简称RCS),反映目标对电磁波的散射能力。
再经过时间R C 后,被雷达接收天线接收的信号为(2)R s t Cσ⋅-。
如果将雷达天线和目标看作一个系统,便得到如图1.2的等效,而且这是一个LTI (线性时不变)系统。
图1.2:雷达等效于LTI 系统等效LTI 系统的冲击响应可写成:1()()Mi i i h t t σδτ==-∑ (1.1)M 表示目标的个数,i σ是目标散射特性,i τ是光速在雷达与目标之间往返一次的时间,2ii R cτ=(1.2) 式中,i R 为第i 个目标与雷达的相对距离。
雷达原理一、绪论雷达:无线电探测与测距。
利用电磁波对目标检测、定位、跟踪、成像和识别。
雷达利用目标对电磁波的反射或散射现象来发现目标并测定其位置的。
组成框图雷达测量原理雷达发射信号:雷达接收信号:雷达利用收发信号之间的相关性获取目标信息雷达组成:天线:向确定的方向发射和接收特定频段的电磁波收发开关:发射状态将发射机输出功率接到天线,保护接收机输入端接收状态将天线接收信号接到接收机,防止发射机旁路信号发射机:在特定的时间、以特定的频率和相位产生大功率电磁波接收机:放大微弱的回波信号,解调目标信息雷达的工作频率:工作频率范围:22mhz--35ghz扩展范围:2mhz--94ghz绝大部分雷达工作在:200mhz--10000ghz雷达的威力范围:最大作用距离、最小作用距离、最大仰角、最小仰角、方位角范围分辨力:区分点目标在位置上靠近的能力距离分辨力:同一方向上两个目标之间最小可区别的距离角度分辨力:在同一距离上的两个不同方向的点目标之间最小能区别的角度数据率:雷达对整个威力范围内完成一次搜索所需要的时间倒数,也就是单位时间内雷达所能提供对一个目标数据的次数。
跟踪速度:自动跟踪雷达连续跟踪运动目标的最大可能速度发射功率的和调制波形:发射功率的大小直接影响雷达的作用距离发射信号的调制波形:早期简单脉冲波形,近代采用复杂波形脉冲宽度:脉冲雷达发射信号所占的时间。
影响探测能力和距离分辨力重复频率:发射机每秒发射的脉冲个数,其倒数是重复周期。
决定单值测距的范围,影响不模糊速区域大小天线波束形状天线:一般用水平面和垂直面内的波束宽度来表示天线的扫描方式:搜索和跟踪目标时,天线的主瓣按照一定规律在空间所作的反复运动。
机械性扫描和电扫描接收机的灵敏度:通常规定在保证50%、90%的发现概率条件下,接收机输入端回波信号的功率作为接收机的最小可检测信号功率。
这个功率越小接收机的灵敏度越高,雷达的作用距离越远。
显示器的形式和数量:雷达显示器是向操纵人员提供雷达信息的一种终端设备,是人际联系的一个环节。
•阴极上接入:①调制脉冲–负向–一万多伏。
②磁控管灯丝电压Uf。
交流或直流电压 6--12V•阳极→接地目的:安全减少分布电容。
★(缺字母23)正常工作条件:除了磁控管本身完好外,还应:①灯丝上加电压(uf)目的:阴极加热至一定温度,表面发射出电子起振。
②阴极上加有负向一万多伏高压调制脉冲。
③负载要匹配(磁控管输出阻抗与负载阻抗相等)。
★(3) 磁控管振荡器工作原理(缺公式,要填23)1). 起振——高频电磁场的初步形成灯丝通电→加热阴极阴极加负极性特高压→放射电子并诱起腔体内微弱的高频振荡。
2). 能量补充——等幅高频脉冲振荡的形成直流能量→交流能量靠电子流为媒体直流电场管内电子受三种场作用 {恒定磁场腔体上交变电磁场阴极放射的电子流怎样充当将直流能量转换成微波振荡交流能量的媒介作用?i) 电子在正交恒定电磁场中的运动——旋转电子云的形成●电子在恒定电场中受电场力●运动电子在恒磁场中受洛仑兹力●电子在正交恒定电磁场中的运动轨迹——摆线。
E eF E-=()V BeF M⋅-=B 不同,电子运动轨迹不同:ua一定时:选择B略>临界Bc下工作,则从阴极飞出的电子将掠过阳极表面再返回阴极,大量电子参与这一运动,便形成旋转电子云。
ii) 旋转电子云与高频场的相应作用——动态能量交换π型、8腔、振荡后在相互作用区的能量交换示意图:切向向量a类电子供能,而b类电子耗能高频场:{供能= 耗能→形成等幅振荡法向向量使电子群聚到最有利交换能量的位置——群聚车幅状电子群旋转运动,每Ts/2转过一个腔缝口,即同步条件:?Vt ——有益电子切向平均速度Ve ——车幅状电子平均移动速度S——邻缝间距E↓→fs↓可见B↓→fs↑★阴极发射的电子在正交恒定电磁场作用下形成旋转电子云;电子云与 作用,完成换能;电子与 作用产生群聚;电子既作摆线运动,又介入车辐作旋转运动.电子流正是靠这种特殊运动完成直流→交流能量转换的媒介作用.★(4) 磁控管检查1)未通电时检查(拆下磁控管) 用万用表测量①灯丝电阻:正常=几欧姆②阴—阳极绝缘电阻:正常>200 兆(M)欧姆2)通电时检查① 检查磁控管电流(Ia)[一般在mA 级(几十 mA 左右)] Ia 是判断发射机工作是否正常的重要参数(一般在机上有监测表)★• 各量程在规定电流值(说明书里规定)→正常。
雷达各部件工作原理雷达基本组成及各部分作用第一部分触发电路(定时器)每隔一段时产生一个尖脉冲,同时送到发射机、接收机、显示器三部分,使它们同步工作。
(触发电路决定工作开始的时间)第二部分发射系统触发脉冲到来后,立刻产生一个大功率,微波波段,具有一定宽度的脉冲包络射频(雷达工作频率,微波波段)的信号。
一、主要组成及各部分作用1:触发脉冲产生器:相当于时钟电路,使雷达各部分同步工作。
2.调制器及预调制器:触发脉冲一到,预调制器输出具有一定宽度的小功率正方波,控制预调制器产生的方波的起始时刻,预调制器产生的方波控制调制器,使调制器产生大功率负高压脉冲。
有的雷达没有预调制器,预调制器的功能由调制器完成。
3:磁控管:在调制器输出的负高压作用下,磁控管产生矩形调制的微波振荡脉冲.实现能量转换,调制器相当于高压电源。
二.特高压电源开关1:3分钟延时开关:保护磁控管2:发射开关(雷达电源:off->Standby)3分钟后,再接通。
第三部分收发开关(双工器)发射时;将发射机与天线接通,并将天线与接收机断开。
接收时;将发射机与天线断开,并将天线与接收机接通。
第四部分接收机系统船用雷达的载波,采用微波波段,目标反射微波时,目标的回波强弱,是由回波信号的包络反映出来的。
接收机的任务就是把包络检测出来。
在X和S波段,采用水平极化波与采用垂直极化波相比,海浪干扰减小1/4~1/10。
天线转速慢,干扰回波强。
很强的海浪回波会使荧光屏产生饱和而淹没其覆盖区内的物标回波,甚至会使接收机产生饱和或过载,失去放大能力而丢失物标。
海浪干扰抑制措施:1、如有双速天线,选用高速天线(如80r/min)2、选用S波段(10cm)雷达3、选用窄脉冲4、采用恒虚警率(CFAR)检测器(使海浪产生的虚警保持恒定)、对数中频放大器(防止荧光屏产生饱和)5、使用STC旋钮调节到既不丢失目标,又能抑制海浪干扰。
在上述操作中:防止丢失小目标是重要的操作原则。
雷达系统原理框图及编程思想
图1 雷达系统原理图
1、回波信号
回波信号由目标回波(动目标),地物杂波(静目标),及系统高斯白噪声组成。
线性调频信号:x=rect(t/mk)exp(jπkt²) (k=B/mk)
目标回波:y=rect(t/mk)*exp(j*2*pi*((f1+k*t/2).*t+fd*i*T))
地物杂波(静目标):y=rect(t/mk)*exp(j*2*pi*((f1+k*t/2).*t))
系统噪声(高斯白噪声):z=0.2*randn(1,N)。
参数:
载频f0=30MHz,线性调频信号带宽B=4MHz,脉宽mk=5us,周期Tr=30us;多普勒频移fd=1000,选取回波数:n=5
其波形如图:
图2 回波
2、高放
高放采用50阶FIR滤波器,中心频率为30MHz,通带为20MHz。
高放后的波形图:
图3 高放后时域频域图形
3、混频+中放
混频的参考频率为20MHz
中放采用50阶FIR滤波器,中心频率为10MHz,通带为4MHz。
图4 混频+中放后时域频域图形
4、相干检波
参考源的时钟频率f0=10MHz;
I 路:I=0.5*X*cos(Φ(t));Q路:Q=0.5*X*sin(Φ(t));
原理图:
中放之后
的信号
sin2πf0t
cos2πf0t LDF
LDF
I路
Q路
波形图:
图5 相位检波后I、Q两路时域图
5、A/D转换
采样频率为5MHz。
x0=(Vmax/2ª)*int{xi*2ª / Vmax };其中,a为AD位数
图6 AD采样后后I、Q两路时域图
6、脉冲压缩
采用发射信号作为匹配滤波。
匹配滤波的脉冲响应:
H(k)=X*(k)exp(-j2πkN), k=0,1,2…N
线性调频信号:
x(n)=rect(n/N)exp(jπkn²) (k=B/tao);
图7 脉冲压缩时域图8、MTI
MTI采用一次对消:
y(n)=x(n)-x(n-1); n=1,2,3…N
图8 MTI
9、取模+积累
对20个回波信号取模并积累,此处是视频相参积累,y(n)= |∑x(n)| n=1,2, 3…N
图9 取模加积累10、CFAR(恒虚警检测)
恒虚警处理时利用的是前8后8的处理方法。
这里设p=0.0001 则由⎰∞
=
η
dx x
p
p
f
)
(式得到检测电平η =4.29
对数运算
N/2N/2
X0
(N/2)∑Xi(N/2)∑Xi
选大
反对数运算
输出
输入
+
—
图10 CFAR。