实验七,双机串行通信
- 格式:doc
- 大小:73.50 KB
- 文档页数:8
单片机双机串口通信在现代电子技术领域,单片机的应用无处不在。
而单片机之间的通信则是实现复杂系统功能的关键之一。
其中,双机串口通信是一种常见且重要的通信方式。
什么是单片机双机串口通信呢?简单来说,就是让两个单片机能够通过串口相互交换数据和信息。
想象一下,两个单片机就像是两个小伙伴,它们需要交流分享彼此的“想法”和“知识”,串口通信就是它们交流的“语言”。
串口通信,顾名思义,是通过串行的方式来传输数据。
这和我们日常生活中并行传输数据有所不同。
在并行传输中,多个数据位同时传输;而在串行传输中,数据一位一位地按顺序传送。
虽然串行传输速度相对较慢,但它所需的硬件连线简单,成本较低,对于单片机这种资源有限的设备来说,是一种非常实用的通信方式。
在进行单片机双机串口通信时,我们首先要了解串口通信的一些基本参数。
比如波特率,它决定了数据传输的速度。
就像两个人说话的快慢,如果波特率设置得不一致,那么双方就无法正常理解对方的意思,数据传输就会出错。
常见的波特率有 9600、115200 等。
还有数据位、停止位和校验位。
数据位决定了每次传输的数据长度,常见的有 8 位;停止位表示一个数据帧的结束,通常是 1 位或 2 位;校验位则用于检验数据传输的正确性,有奇校验、偶校验和无校验等方式。
为了实现双机串口通信,我们需要在两个单片机上分别进行编程。
编程的主要任务包括初始化串口、设置通信参数、发送数据和接收数据。
初始化串口时,我们要配置好相关的寄存器,使其工作在我们期望的模式下。
比如设置波特率发生器的数值,以确定合适的波特率。
发送数据相对来说比较简单。
我们将要发送的数据放入特定的寄存器中,然后启动发送操作,单片机就会自动将数据一位一位地通过串口发送出去。
接收数据则需要我们不断地检查接收标志位,以确定是否有新的数据到来。
当有新数据时,从接收寄存器中读取数据,并进行相应的处理。
在实际应用中,单片机双机串口通信有着广泛的用途。
比如在一个温度监测系统中,一个单片机负责采集温度数据,另一个单片机则负责将数据显示在屏幕上或者上传到网络。

双机之间的串行通信设计随着计算机技术的快速发展,双机之间的串行通信变得越来越重要。
无论是在数据传输、系统控制还是协同处理方面,双机之间的串行通信都扮演着关键角色。
本文将探讨双机之间的串行通信设计,包括串行通信的原理、串行通信的应用、串行通信的优势以及设计双机之间串行通信的步骤。
一、串行通信的原理串行通信是一种逐位传输数据的通信方式。
在双机之间的串行通信中,一台机器将数据一位一位地发送给另一台机器,接收方接收到数据后将其重新组装为完整的信息。
串行通信常用的协议有RS-232、RS-485、SPI等。
二、串行通信的应用1.数据传输:双机之间通过串行通信传输大量数据,例如在两台计算机之间传输文件、传输实时音视频数据等。
2.系统控制:双机之间通过串行通信进行系统控制,例如一个机器向另一个机器发送指令,控制其执行特定的任务。
3.协同处理:双机之间通过串行通信进行协同处理,例如在分布式系统中,各个节点之间通过串行通信共同完成复杂的任务。
三、串行通信的优势相比于并行通信,双机之间的串行通信具有以下几个优势:1.传输距离更远:串行通信可以在较长的距离上进行数据传输,而并行通信受到信号干扰和传输线损耗的限制。
2.更少的传输线:串行通信只需要一条传输线,而并行通信需要多条传输线。
3.更快的速度:串行通信在同等条件下具有更快的传输速度,因为每一位数据传输所需的时间更短。
4.更可靠的传输:串行通信可以通过校验位等方式来保证数据传输的可靠性。
四、设计双机之间串行通信的步骤设计双机之间的串行通信需要经过以下几个步骤:1.确定通信协议:首先需要确定双机之间的通信协议,例如RS-232、RS-485等。
不同的通信协议有着不同的特点和适用范围,需要根据具体的应用需求进行选择。
2.确定物理连接方式:根据通信协议的选择,确定双机之间的物理连接方式,例如使用串口线连接、使用网络连接等。
3.确定数据传输格式:确定数据传输的格式,包括数据的编码方式、数据的起始位和停止位等。
学号姓名专业电气工程及其自动化班级
实验7双机通信
一、实验目的
掌握串行口通信工作原理。
二、实验内容
(1)掌握串行通信原理和中断法通信软件编程
(2)完成实验7的C51语言编程
三、实验设备
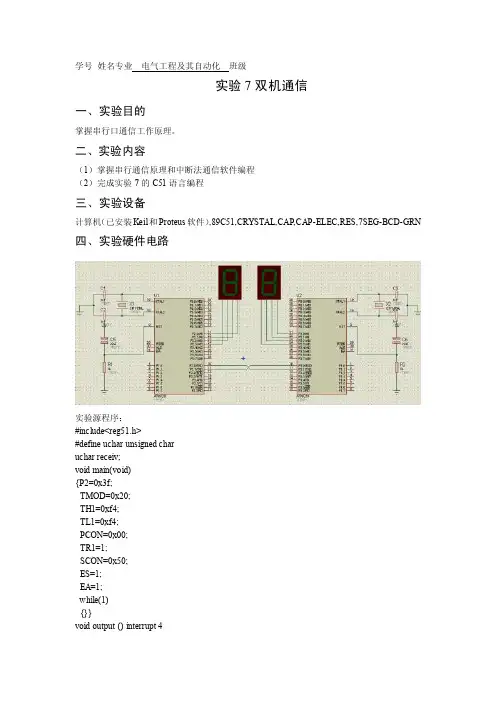
计算机(已安装Keil和Proteus软件),89C51,CRYSTAL,CAP,CAP-ELEC,RES,7SEG-BCD-GRN 四、实验硬件电路
实验源程序:
#include<reg51.h>
#define uchar unsigned char
uchar receiv;
void main(void)
{P2=0x3f;
TMOD=0x20;
TH1=0xf4;
TL1=0xf4;
PCON=0x00;
TR1=1;
SCON=0x50;
ES=1;
EA=1;
while(1)
{}}
void output () interrupt 4
{if(RI==1)
{RI=0;
receiv=SBUF;
SBUF=receiv;}
if(TI==1)
{TI=0;
P2=receiv;}}
五、实验要求
(1)、根据实验内容设计相应的调试程序,并通过仿真,运行正确。
(2)、掌握A/D转换器0809的工作原理。
(3)、掌握A/D转换器0809的编程方法。
(4)、认真整理实验报告并按时提交。
单片机单片机课程设计-双机串行通信单片机课程设计双机串行通信在当今的电子信息领域,单片机的应用无处不在。
而双机串行通信作为单片机系统中的一个重要环节,为实现设备之间的数据交换和协同工作提供了关键的技术支持。
一、双机串行通信的基本原理双机串行通信是指两个单片机之间通过串行接口进行数据传输的过程。
串行通信相较于并行通信,具有线路简单、成本低、抗干扰能力强等优点。
在串行通信中,数据是一位一位地按顺序传输的。
常见的串行通信协议有 UART(通用异步收发器)、SPI(串行外设接口)和 I2C(内部集成电路)等。
在本次课程设计中,我们主要采用 UART 协议来实现双机串行通信。
UART 协议包括起始位、数据位、奇偶校验位和停止位。
起始位用于标识数据传输的开始,通常为逻辑 0;数据位可以是 5 位、6 位、7 位或 8 位,具体取决于通信双方的约定;奇偶校验位用于检验数据传输的正确性,可选择奇校验、偶校验或无校验;停止位用于标识数据传输的结束,通常为逻辑 1。
二、硬件设计为了实现双机串行通信,我们需要搭建相应的硬件电路。
首先,每个单片机都需要有一个串行通信接口,通常可以使用单片机自带的UART 模块。
在硬件连接方面,我们将两个单片机的发送端(TXD)和接收端(RXD)交叉连接。
即单片机 A 的 TXD 连接到单片机 B 的 RXD,单片机 B 的 TXD 连接到单片机 A 的 RXD。
同时,还需要共地以保证信号的参考电平一致。
此外,为了提高通信的稳定性和可靠性,我们可以在通信线路上添加一些滤波电容和上拉电阻。
三、软件设计软件设计是实现双机串行通信的核心部分。
在本次课程设计中,我们使用 C 语言来编写单片机的程序。
对于发送方单片机,首先需要对 UART 模块进行初始化,设置波特率、数据位、奇偶校验位和停止位等参数。
然后,将要发送的数据放入发送缓冲区,并通过 UART 发送函数将数据一位一位地发送出去。
对于接收方单片机,同样需要对 UART 模块进行初始化。
单片机单片机课程设计-双机串行通信摘要由单片机构成的双机通信系统采用总线型主从式结构。
程设计就是要利用单片机来完成一个系统,实现双片单片机串行通信。
通信的结果实用数码管进行显示,数码管采用查表方式显示。
所谓主从式结构,即在两个单片机中,一个主机负责通信管理,另一个为从机,从机要负责主机的调度与支配。
该设计用A T89C51芯片,并用C语言程序来控制A T89C51,使之能实现两个单片机之间的通信。
通信方式为单工通信,一个为主单片机,作为发送方,另一个为从单片机,作为接收方。
关键字:单片机.AT89C51.C语言目录摘要 (1)前言 (3)二绪论 (4)2.1单片机 (4)2.2C语言: (4)2.3双机通信 (5)三.系统分析 (6)3.1 基本原理 (6)3.2波特率选择 (7)3.3通信协议的使用 (7)四、硬件设计 (7)4.1单片机串行通信功能 (10)4.2 MAX232芯片 (12)4.3整体电路设计 (13)五、软件设计 (14)5.1串行通信软件实现 (14)5.2程序流程图 (14)六.联合调试 (17)总结 (18)参考文献 (23)前言近年来,在自动化控制和只能仪器仪表中,单片机的应用越来越广泛,由于单片机的运算功能较差,往往需要借助计算机系统,因此单片机和PC机进行远程通信更具有实际意义,通信的关键在于互传数据信息。
51单片机内部的串行口具有通信的功能,该串口可作为通信接口,利用该串口与PC机的串口通信进行串行通信,将单片机采集的数据进行整理及统计等复杂处理就能满足实际的应用需要。
51单片机的开发除了硬件支持外,同样离不开软件。
用汇编语言或C 语言等高级语言编写的源程序必须转化为机器码才能被执行。
目前流行的Keil 8051c编译器。
它提供了集成开发环境,包括C编译器、宏编码、连接器、库管理和仿真调制器。
利用keil 8051ccuvision编写的程序可直接调用编译器编译,连接后可直接运行。
实验七、双机通信实验 一、实验目的掌握单片机串行口的工作原理及编程。
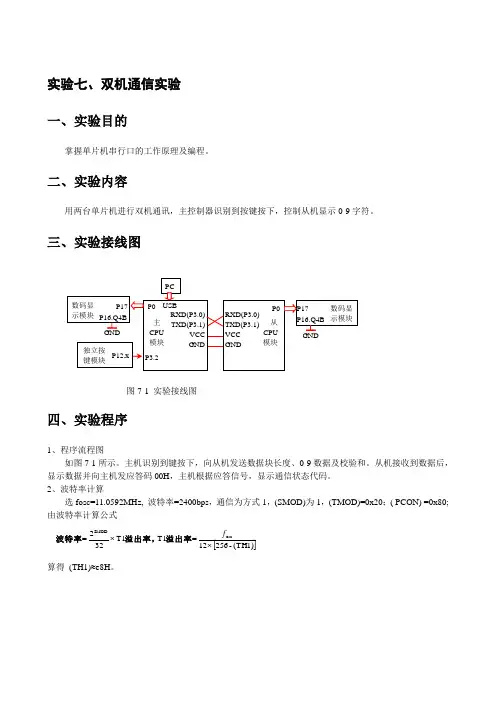
二、实验内容用两台单片机进行双机通讯,主控制器识别到按键按下,控制从机显示0-9字符。
三、实验接线图四、实验程序1、程序流程图如图7-1所示。
主机识别到键按下,向从机发送数据块长度、0-9数据及校验和。
从机接收到数据后,显示数据并向主机发应答码00H ,主机根据应答信号,显示通信状态代码。
2、波特率计算选fosc=11.0592MHz, 波特率=2400bps ,通信为方式1,(SMOD)为1,(TMOD)=0x20;( PCON) =0x80; 由波特率计算公式算得 (TH1)≈e8H 。
图7-1 实验接线图[](TH1)-25612T1T1322osc SMOD⨯=⨯=f 溢出率溢出率,波特率3、源程序 1)主机源程序// 识别到按键按下,发送0-9数据给从机,并显示通信状态码 #include<reg51.h> #include<intrins.h>#define uint unsigned int #define uchar unsigned charsbit K=P3^2; //定义按键K ,用于控制U2void SEND(uchar s_data)//发送一个字节数据 {SBUF=s_data; while(TI==0); TI=0;}uchar RCV(void)//接收一个字节数据 {while(RI==0); RI=0; return(SBUF);}void D_1S(void) {uint N=500,i;while(N--) for(i=0;i<100;i++) _nop_();}void DIS(uchar dis)//显示dis 中字形码对应的字符 { P0=dis; D_1S(); P0=~0x00;}void MAIN(void){ uchar data SUM,LEN;// SUM,校验和;LEN ,数据块长度; uchar i,ans; //ans 接收的应答数据图7-2 主机程序流程图 图7-3 从机程序流程图SP=0x5f; P0=~0x00; //数码块消隐TMOD=0x20; //T1:8位自动重装定时器TL1=0xe8;TH1=0xe8;PCON=0x80;TR1=1;//F=11.0592MHz,BPS=2400SCON=0x40; //10位,禁止接收//-------扫描按键-------key0:K=1; if(K!=0) goto key0;//-------发送数据块和校验和-------S_0:SUM=0x00; LEN=10; SEND(LEN);for(i=0;i<LEN;i++){SEND(i); SUM+=i; }SEND(SUM);//-------接收从机发来的响应数据-------REN=1; ans=RCV(); REN=0;if(ans==0x00) //发送正常,显示“0”{ DIS(~0x3f); goto key0;}else //发送异常,显示“1”,并重新发送数据{ DIS(~0x06); goto S_0;}}2)从机源程序// 接收数据0-9,并用数码块显示,之后接收正常向主机发00H,否则发送01H#include<reg51.h>#include<intrins.h>#define uint unsigned int#define uchar unsigned charuchar data LS0[]={~0x3F,~0x06,~0x5B,~0x4F,~0x66,~0x6D,~0x7D,~0x07,~0x7F,~0x6F};void SEND(uchar s_data)//发送一个字节数据{SBUF=s_data; while(TI==0); TI=0;}uchar RCV(void)//接收一个字节数据{while(RI==0); RI=0; return(SBUF);}void D_1S(void){uint i,N=500;while(N--) for(i=0;i<100;i++) _nop_();}void DIS(uchar LEN,uchar r_data[11])//显示0-9{uchar data i;for(i=0;i<LEN;i++) {P0=LS0[r_data[i]]; D_1S(); P0=~0x00;}}void MAIN(void){ uchar data SUM,LEN; //SUM,校验和;LEN,数据块长度;ID,从站地址uchar data i,r_data[10],RSUM;//r_data接收的数据,RSUM接收的校验和SP=0x5f; P0=~0x00; TMOD=0x20;TL1=0xe8;TH1=0xe8;PCON=0x80;TR1=1; SCON=0x40;R_D:REN=1;SUM=0x00;LEN=RCV();for(i=0;i<LEN;i++){r_data[i]=RCV(); SUM+=r_data[i];}RSUM=RCV();if(RSUM==SUM){DIS(10,r_data);SEND(0x00);goto R_D;}else {SEND(0x01);goto R_D;}}五、实验步骤1、按图7-1接线;2、用keil软件编辑、编译源程序,生成两个hex文件。
实验七双机通信实验一、实验目的:1.掌握单片机串口通信程序的设计。
2.了接RS232接口通信的特点。
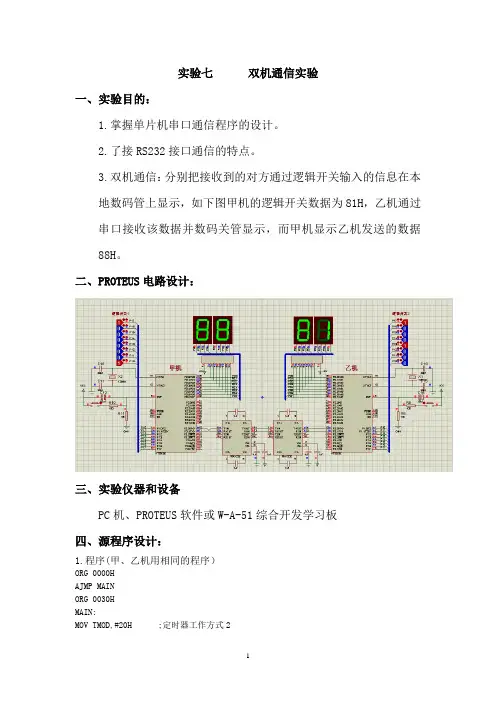
3.双机通信:分别把接收到的对方通过逻辑开关输入的信息在本地数码管上显示,如下图甲机的逻辑开关数据为81H,乙机通过串口接收该数据并数码关管显示,而甲机显示乙机发送的数据88H。
二、PROTEUS电路设计:三、实验仪器和设备PC机、PROTEUS软件或W-A-51综合开发学习板四、源程序设计:1.程序(甲、乙机用相同的程序)ORG 0000HAJMP MAINORG 0030HMAIN:MOV TMOD,#20H ;定时器工作方式2MOV TH1,#0FDH ;设置波特率MOV TL1,#0FDHMOV PCON,#00H ;波特率不乘2SETB TR1MOV SCON,#50H ;串行口工作方式1并启动接收JX:MOV A,P1MOV SBUF,AW1:JNB TI,W1CLR TIW2:JNB RI,W2CLR RIMOV A,SBUFMOV P0,ALJMP JXEND六、总结、心得这是的实验中我遇到了很多的难题,也发现了自己很多的不足。
刚开始的时候在循环比较的时候老是出错,对变量的寻址方式不熟悉,不会使用指针变量使程序简化。
后来经过老师的提醒跟自己的摸索,终于把程序写正确了。
所以是这么简单的一个程序,但是我还是要花很长的一断时间才可以把它完成,这说明了我对知识的掌握运用还是很不熟练,虽然读程序的时候可以读懂,但是到自己写的时候就感觉无从下手。
单片机的双机串口通信原理单片机的双机串口通信原理是通过串口连接两个单片机,使它们能够进行数据的传输和通信。
串口是一种常见的通信方式,它使用两条信号线进行数据的传输:一条是串行数据线(TXD),用于发送数据;另一条是串行接收线(RXD),用于接收数据。
通过串口通信,两个单片机可以进行双向的数据传输,实现信息的互相交流和共享。
在双机串口通信中,一台单片机充当主机(Master),另一台单片机充当从机(Slave)。
主机负责发起通信请求并发送数据,从机负责接收并响应主机发送的数据。
通信过程中,主机和从机需要遵守相同的协议和通信规则,以确保数据的正确和可靠传输。
双机串口通信的主要步骤如下:1. 端口初始化:在双机串口通信开始之前,两台单片机的串口端口需要初始化。
主机和从机需要设置相同的波特率(Baud Rate),数据位数(Data Bits)、停止位数(Stop Bits)和校验方式(Parity Bit),确保两台单片机之间的通信能够正常进行。
2. 数据发送:主机将要发送的数据写入到串口发送寄存器中,然后通过串口发送线路将数据位一位一位地发送给从机。
主机发送完所有数据位后,等待从机的响应。
3. 数据接收:从机通过串口接收线路接收主机发送的数据位,然后将接收到的数据位存放在串口接收寄存器中,等待从机的处理。
4. 数据处理:从机接收到主机发送的数据后,根据通信协议和通信规则进行数据处理。
从机可能需要对数据进行校验、解析和执行相应的操作,然后将处理结果写入到串口发送寄存器中,以供主机进行相应的处理。
5. 响应发送:从机将处理结果写入到串口发送寄存器中,然后通过串口发送线路将数据位一位一位地发送给主机。
从机发送完所有数据位后,等待主机的进一步操作。
6. 数据接收:主机通过串口接收线路接收从机发送的数据位,然后将接收到的数据位存放在串口接收寄存器中,等待主机的处理。
7. 数据处理:主机接收到从机发送的数据后,根据通信协议和通信规则进行数据处理。
单片机双机串行实验报告实验目的:通过单片机实现双机串行通信功能,掌握串行通信的原理、方法和程序设计技巧。
实验原理:双机串行通信是指通过串行口将两台单片机连接起来,实现数据的传输和互动。
常用的串行通信方式有同步串行通信和异步串行通信。
异步串行通信是指通过发送和接收数据时的起始位、停止位和校验位进行数据的传输。
而同步串行通信是指通过外部时钟信号进行数据的同步传输。
实验器材:1.两台单片机开发板(MCU7516)2.两个串口线3.两台计算机实验步骤:1.将两台单片机开发板连接起来,通过串口线连接它们的串行口。
2.在两台计算机上分别打开串口调试助手软件,将波特率设置为相同的数值(例如9600)。
3.在编程软件中,编写两个程序分别用于发送数据和接收数据。
4.在发送数据的程序中,首先要设置串口的波特率、数据位、停止位和校验位,并将数据存储在缓冲区中。
然后利用串口发送数据的指令将数据发送出去。
5.在接收数据的程序中,同样要设置串口的参数。
然后使用串口接收数据的指令将接收到的数据存储在缓冲区中,并将其打印出来。
实验结果与分析:经过实验,我们成功地实现了单片机之间的双机串行通信。
发送数据的单片机将数据发送出去后,接收数据的单片机能够正确地接收到数据,并将其打印出来。
实验中需要注意的是,串口的波特率、数据位、停止位和校验位必须设置为相同的数值。
否则,发送数据的单片机和接收数据的单片机无法正常进行通信。
同时,在实验之前,需要了解单片机开发板支持的串口通信相关的指令和函数。
实验总结:通过本次实验,我们深入了解了单片机之间的双机串行通信原理和方法。
掌握了串口的设置和使用方法,以及相关的指令和函数。
在实验中,我们学会了如何通过串行口实现数据的传输和互动,为今后的单片机应用和开发打下了基础。
同时,我们还发现,双机串行通信在实际应用中有着广泛的用途。
例如,可以通过串行通信实现两台计算机之间的数据传输,或者实现单片机与计算机之间的数据收发。
一、实验目的1. 理解串行通讯的基本原理和通信方式。
2. 掌握串行通讯的硬件设备和软件实现方法。
3. 学会使用串行通讯进行数据传输。
4. 通过实验,提高动手能力和分析问题、解决问题的能力。
二、实验原理串行通讯是指用一条数据传输线将数据一位一位地按顺序传送的通信方式。
与并行通讯相比,串行通讯具有线路简单、成本低等优点。
串行通讯的基本原理如下:1. 异步串行通讯:每个字符独立发送,字符间有时间间隔,不需要同步信号。
每个字符由起始位、数据位、奇偶校验位和停止位组成。
2. 同步串行通讯:数据块作为一个整体发送,需要同步信号。
同步串行通讯分为两种方式:面向字符方式和面向比特方式。
三、实验设备1. 计算机:一台2. 串行通讯设备:串行数据线、串行接口卡、串口调试助手等3. 单片机实验平台:一台4. 数码管显示模块:一个四、实验内容1. 异步串行通讯实验(1)硬件连接:将计算机的串口与单片机实验平台的串行接口连接。
(2)软件设计:编写程序,实现单片机向计算机发送数据,计算机接收数据并显示在屏幕上。
(3)实验步骤:a. 设置串行通信参数:波特率、数据位、停止位、奇偶校验位等。
b. 编写发送程序,实现单片机向计算机发送数据。
c. 编写接收程序,实现计算机接收数据并显示在屏幕上。
2. 同步串行通讯实验(1)硬件连接:与异步串行通讯实验相同。
(2)软件设计:编写程序,实现单片机向计算机发送数据块,计算机接收数据块并显示在屏幕上。
(3)实验步骤:a. 设置串行通信参数:波特率、数据位、停止位、奇偶校验位等。
b. 编写发送程序,实现单片机向计算机发送数据块。
c. 编写接收程序,实现计算机接收数据块并显示在屏幕上。
3. 双机通讯实验(1)硬件连接:将两台单片机实验平台通过串行数据线连接。
(2)软件设计:编写程序,实现两台单片机之间相互发送和接收数据。
(3)实验步骤:a. 设置串行通信参数:波特率、数据位、停止位、奇偶校验位等。
双机串行通讯设计实验报告实验报告:双机串行通讯设计实验一、实验目的本实验的目的是通过双机串行通讯设计,实现两台计算机之间的数据传输和通信,掌握串行通讯的基本原理和应用。
二、实验原理串行通讯是指信息逐位地按顺序传送的通信方式。
串行通讯的优点是只需一对逻辑线路即可完成数据传输,可以减少硬件成本和物理排布空间。
而并行通讯需要多对逻辑线路,更加复杂。
在本实验中,我们使用两台计算机分别作为发送端和接收端。
数据通过串行通讯线路逐位传输,接收端按照发送端发送的顺序恢复数据。
具体步骤如下:1.确定双机串行通讯的物理连接方式,例如通过串口线连接两台计算机的串行端口。
2.在发送端,将待传输的数据进行串行化处理,即将数据逐位拆分成一个个比特,按照一定的传输格式进行编码。
3.将编码后的数据按照一定的速率逐位地通过串行线路发送到接收端。
4.在接收端,根据发送端的传输格式,逐位地接收并解码数据。
5.接收端将解码后的数据进行处理,恢复为原始数据。
三、实验步骤和结果1.硬件连接:使用串口线将两台计算机的串行端口连接起来。
2.软件设置:在两台计算机上分别进行串口的设置,确定串口的参数(波特率、数据位、停止位等)一致。
3.发送端设计:编写发送端的程序,将待传输的数据进行串行化处理,并按照约定的传输格式进行编码。
4.接收端设计:编写接收端的程序,根据发送端的传输格式,逐位接收和解码数据,并进行恢复处理。
5.实验测试:分别在发送端和接收端运行程序,进行数据传输和通信测试。
通过观察接收端接收到的数据是否与发送端发送的数据一致来验证通讯是否成功。
实验结果显示,通过双机串行通讯设计,发送端的数据能够成功传输到接收端,并且接收端能够正确解码和恢复数据,实现了双机之间的数据传输和通信。
四、实验总结本实验通过双机串行通讯的设计,实现了两台计算机之间的数据传输和通信。
实验结果表明串行通讯的设计和实现是可行的。
串行通讯具有硬件成本低、占用空间少等优点,因此在实际应用中被广泛使用。
双机串行通信的设计与实现一、设计要求1.单机自发自收串行通信。
接收键入字符,从8251A的发送端发送,与同一个8251A的接收端接收,然后在屏幕上显示出来。
2.双机串行通信,在一台PC机键入字符,从8251A的发送端发送给另一台PC机,另一台PC机的8251A的接收端接收,然后在屏幕上显示出来。
二、所用设备IBM-PC机两台(串行通信接口8251A两片,串行发送器MC1488和串行接收器MC1489各两片,定时器/计数器8253,终端控制器8259等),串口线一根串行直连电缆用于两台台电脑通过串行口直接相连,电缆两端的插头都是9 针的母插头:三、硬件方案1.设计思想计算机传输数据有并行和串行两种模式。
在并行数据传输方式中,使用8条或更多的导线来传送数据,虽然并行传送方式的速度很快,但由于信号的衰减或失真等原因,并行传输的距离不能太长,在串行通信方式中,通信接口每次由CPU得到8位的数据,然后串行的通过一条线路,每次发送一位将该数据放送出去。
串行通信采用两种方式:同步方式和异步方式。
同步传输数据时,一次传送一个字节,而异步传输数据是一次传送一个数据块。
串口是计算机上一种非常通用设备串行通信的协议。
大多数计算机包含两个基于RS232的串口。
串口按位(bit)发送和接收字节。
尽管比按字节(byte)的并行通信慢,但是串口可以在使用一根线发送数据的同时用另一根线接收数据。
典型地,串口用于ASCII码字符的传输。
通信使用3根线完成:(1)地线,(2)发送,(3)接收。
由于串口通信是异步的,端口能够在一根线上发送数据同时在另一根线上接收数据。
其他线用于握手,但是不是必须的。
串口通信最重要的参数是波特率、数据位、停止位和奇偶校验。
对于两个进行通行的端口,这些参数必须匹配:RS-232(ANSI/EIA-232标准)是IBM-PC及其兼容机上的串行连接标准。
可用于许多用途,比如连接鼠标、打印机或者Modem,同时也可以接工业仪器仪表。
综合实验报告实验题目:双机串行通信的设计与实现学生班级: 电子学生姓名:学生学号:指导教师:实验时间:题目:双机串行通信的设计与实现班级:电子14-2 姓名:陈俊臣摘要串行通信是单片机的一个重要应用。
本次课程设计就是要利用单片机来完成一个系统实现双片单片机串行通信。
通信的结果实用数码管进行显示数码管采用查表方式显示。
两个单片机之间采用RS232进行双机通信。
在通信过程中使用通信协议进行通信。
双机通信的实质就是解决两单片机串行通信问题。
针对于89C51单片机全双工异步串行通信口,我们采用单片机直接交叉互连的串行通信方式。
考虑到本设计应用于短距离传输、两单片机具有相同的数据格式及电平且为使设计简单,我们最终决定本系统采用方式一单片机直接交叉连接的串行通信方式,上位机发送的数据由串行口TXD端输出,直接由下位机的串行口数据接收端RXD接收。
本设计的硬件电路分为数码管显示模块、单片机工作的基本复位电路以及晶振模块。
编程采用C语言加以实现。
通信的结果使用数码管进行显示,数码管采用查表方式显示,两个单片机之间采用RS-232进行双向通信。
目录1 引言-------------------------------------------------------2 设计原理及要求---------------------------------------------设计要求和原理--------------------------------------------串行通信概述与分类-----------------------------------串行通信和并行通信区别-------------------------------MCS-51串行接口的基本特点-----------------------------3器件介绍器件简单概述-----------------------------------------器件主要功能特性--------------------------------------芯片引脚介绍----------------------------------------4系统设计设计要求--------------------------------------------设计方案--------------------------------------------硬件设计--------------------------------------------软件设计-------------------------------------------4 电路仿真图----------------------------------------------------5心得------------------------------------------------------------6参考文献--------------------------------------------------------1引言片机广泛应用于仪器仪表、家用电器、医用设备、航空航天、专用设备的智能化管理及过程控制等领域随着计算机技术的发展及工业自动化水平的提高,在许多场合采用单机控制已不能满足现场要求,因而必须采用多机控制的形式,而多机控制主要通过多个单片机之间的串行通信实现。
单片机双机之间的串行通信设计1.引言单片机双机之间的串行通信是指两个或多个单片机之间通过串口进行数据传输和通信的过程。
串行通信是一种逐位传输数据的方式,与并行通信相比,它占用的硬件资源更少,且传输距离较远。
本文将介绍单片机双机之间串行通信的设计过程,包括硬件设计和软件编程。
2.硬件设计串行通信需要使用到两个主要的硬件部件:串口芯片和通信线路。
串口芯片负责将要发送或接收的数据转换成串行数据流,并通过通信线路进行传输。
通信线路通常包括两根传输数据的线路(TX和RX)、地线和时钟线。
2.1串口芯片的选择常用的串口芯片有MAX232、MAX485、CH340等。
选择合适的芯片需要考虑通信距离、通信速率、系统的功耗等因素。
对于较短的通信距离和较低的通信速率,可以选择MAX232芯片;而对于长距离通信和较高的通信速率,可以选择MAX485芯片。
2.2通信线路设计通信线路的设计需要考虑信号的传输质量和抗干扰能力。
通常使用双绞线或者屏蔽线路来减小信号的串扰和干扰。
对于短距离通信,双绞线即可满足需求;而对于长距离通信,需要采用屏蔽线路来减小串扰和干扰。
3.软件设计串行通信的软件设计主要包括通信协议的制定和数据包的格式规定。
3.1通信协议的选择通信协议是指数据传输的一套规则和约定,它规定了数据的格式、传输顺序、误码校验等内容。
常用的通信协议有UART、RS232、SPI、I2C等。
UART是最常用的通信协议,它一般使用异步通信方式,并具有较高的通信速率和稳定性。
3.2数据包的格式规定数据包是一组有意义的数据的集合,它包括起始位、数据位、停止位和校验位等。
起始位用于标识一个数据包的开始,通常为逻辑低电平;数据位用于存储要传输的数据;停止位用于标识数据包的结束,通常为逻辑高电平;校验位用于检测数据传输过程中是否发生错误。
校验位可以是奇校验、偶校验、无校验等。
4.实验步骤4.1连接硬件根据硬件设计部分的要求,将串口芯片和通信线路连接到单片机上。
数学与信息技术学院《计算机应用课程设计》设计报告摘要微机与外部的信息交换称为通信,基本方式有并行与串行两种。
本文主要说明串行方式,主要掌握微机串行通信的连接方法,熟悉其工作方式及其功能,运用程序流程图说明了其工作过程详细介绍了使用串行接口芯片8251A实现双CPU系统数据传输的设计和方法,接着从8251A的基本原理、工作方式,以及硬件和软件设计方面进行了详细的说明。
并在两台微处理器的目标机上,用串口通信模式实现了两机之间的高效通信。
关键词: 8251A;串口通信;数据传送AbstractExchange of information between computer and external as communications.Basic methods are both parallel and serial.This paper shows the serial mode, the main control computer serial communication connection method, familiar with their work and their functions, the use of process flow chart illustrates the process of their work.Described in detail using the serial interface chip 8251A dual CPU system design and method of data transmission, then the basic principle from 8251A, work, and hardware and software design aspects in detail. Two microprocessors in the target machine, achieved with a serial communication mode efficient communication between the two machines.Keywords: 8251A; serial communication; data transfer目录摘要 (2)Abstract (3)第一章系统的功能 (5)第二章系统的设计方案 (6)2.1硬件设计 (6)2.1.1涉及的芯片 (6)2.1.2 8251A芯片 (6)2.1.3 8279芯片 (8)2.2软件设计 (9)2.2.1设计简单介绍 (9)2.2.2 模块设计详细分析 (9)第三章操作说明 (11)第四章总结 (12)参考文献 (13)附: (14)1、硬件原理图 (14)2、程序流程图 (15)3、源程序清单及注释 (17)第一章系统的功能随着计算机的不断普及,在我们的周围可能会同时出现多台微型计算机,而且这些计算机的牌号,后型号不同,而且有的格式不兼容。
实验七、双机串行通信一、实验目的1、熟悉微机接口实验装置的结构及使用方法2、掌握通信接口芯片8251和8250的功能和使用方法3、学会串行通信程序的编制方法二、实验仪器1、PC实验箱及连接线2、两台计算机3、9针接头串行电缆三、芯片介绍(见实验七)四、实验内容实验原理图和接线同图4.12和4.13,不同的是要将串行电缆从实验箱上的RS-232接口连接到另外一台计算机上的串口,两台机子通过8250和8251进行字串信息的相互传输。
两台机子分别设置为发送和接收状态,发送端从键盘输入一段字符信息送8250或8251,接收端则从8251或8250接收一段字符。
发送和接收结束后回到主选菜单,可进行再次通信。
在发送和接收过程中,有一个出错处理过程,采用接收方回传和发送方确认来保证发送和接收正确。
五、预习要求1、熟悉8250和8251的工作原理2、熟悉实验原理3、编制实验要求的汇编语言源程序五、程序流程图和程序清单1、主程序1、发送子程序:3、接收子程序:程序清单:;SY51-2.ASMTIMCTL EQU 293HTIMER0 EQU 290HCLK EQU 3000BPS EQU 9600FACTOR EQU 16DATA51 EQU 280HCTRL51 EQU 281HDATA50 EQU 2F8HDRL50 EQU 2F8HDRH50 EQU 2F9HIER50 EQU 2F0HIIR50 EQU 2FAHLCR50 EQU 2FBHMCR50 EQU 2FCHLSR50 EQU 2FDHMSR50 EQU 2FEHDIVL EQU 0CHDIVH EQU 00HDATA SEGMENTMESS1 DB 'PRESS 1 TO SEND MESSAGE!',0AH,0DHDB 'PRESS 2 TO RECEIVE MESSAGE!',0AH,0DHDB 'PRESS 3 TO QUIT!',0AH,0DH,0AH,0DH,'$' ERROR DB '*****PLEASE SELECT AGAIN!*****',0AH,0DH,'$'MES1 DB 'Sending message......',0AH,0DH,0AH,0DH,'$'MES2 DB 'Receiving message......',0AH,0DH,0AH,0DH,'$'MESS2 DB 50DB ?MES DB 50 DUP(?)MESS3 DB 50 DUP(?)BUF1 DB ?BUF2 DB ?DATA ENDSSTACK SEGMENT PARA STACKDB 128 DUP(?)STACK ENDSCODE SEGMENTASSUME CS:CODE,DS:DATA,SS:STACKSTART: MOV AX,DATAMOV DS,AXCALL SETTIMCALL INIT51CALL INIT50AG: LEA DX,MESS1MOV AH,09HINT 21HAG1: MOV DL,0FFH ;显示提示信息,MOV AH,06H ;进行菜单选择INT 21HJZ AG1CMP AL,'1'JZ SDCMP AL,'2'JZ RCCMP AL,'3'JZ EXITLEA DX,ERRORMOV AH,09HINT 21HJMP AGSD: CALL SENDJMP AGRC: CALL RECEJMP AGEXIT: MOV AX,4C00HINT 21HSEND PROC ;发送子程序MOV AH,09HLEA DX,MES1INT 21H ;显示提示信息MOV AH,0AHLEA DX,MESS2INT 21H ;从键盘输入字串信息MOV CL,MESS2[1]LOP1: MOV AL,CLMOV BUF1,ALCALL SED ;发送一个字符(字串长度) CALL REC ;接收回传字符CMP AL,CLJZ SKIP1MOV AL,15H ;回传字符不同于发送字符MOV BUF1,AL ;有错,发出错标志,重发字符CALL SEDJMP LOP1SKIP1: LEA SI,MES ;发送字串内容(含出错处理)LOP2: MOV AL,[SI]MOV BUF1,ALCALL SEDCALL RECMOV AL,BUF2CMP AL,[SI]JZ SKIP2MOV AL,15HMOV BUF1,ALCALL SEDJMP LOP2SKIP2: DEC CLJZ EXIT1INC SIJMP LOP2EXIT1: MOV CX,3LOOP1: MOV AH,06HMOV DL,0AHINT 21HMOV DL,0DHINT 21HLOOP LOOP1RETSEND ENDPRECE PROC ;接收子程序MOV AH,09HLEA DX,MES2INT 21H ;显示提示信息LOP3: CALL REC1 ;接收一个字符;并保存在CL中 MOV CL,BUF2MOV BUF1,CLCALL SED1 ;回送字符CALL REC1 ;接收字符MOV AL,BUF2CMP AL,15HJZ LOP3 ;是出错标志,表明上一个接收;字符已经出错,需要重现接收LEA DI,MESS3LOP4: MOV [DI],AL ;将刚才接收字符送缓冲区MOV BUF1,ALCALL SED1 ;回送字符DEC CL ;判断是否接收完毕,没有则继JZ EXIT2 ;续进行接收、回传、判断操作CALL REC1MOV AL,BUF2CMP AL,15HINC DIJMP LOP4SKIP3: CALL REC1MOV AL,BUF2JMP LOP4EXIT2: INC DI ;已经接收所有要发送字符,MOV AL,'$' ;在屏幕上显示出来MOV [DI],ALLEA DX,MESS3MOV AH,09HINT 21HMOV CX,3LOOP2: MOV AH,06HMOV DL,0AHINT 21HMOV DL,0DHINT 21HLOOP LOOP2RETRECE ENDPSED PROC ;8251发送单个字符子程序 MOV DX,CTRL51WAIT1: IN AL,DXTEST AL,01HJZ WAIT1MOV DX,DATA51MOV AL,BUF1OUT DX,ALRETSED ENDPSED1 PROC ;8250发送单个字符子程序 MOV DX,LSR50WAIT3: IN AL,DXTEST AL,20HJZ WAIT3MOV DX,DATA50MOV AL,BUF1OUT DX,ALRETSED1 ENDPREC PROC ;8251接收单个字符子程序 MOV DX,CTRL51WAIT2: IN AL,DXTEST AL,02HJZ WAIT2MOV DX,DATA51IN AL,DXMOV BUF2,ALRETREC ENDPREC1 PROC ;8250接收单个字符子程序 MOV DX,LSR50WAIT4: IN AL,DXJZ WAIT4MOV DX,DATA50IN AL,DXMOV BUF2,ALRETREC1 ENDPSETTIM PROC ;8251时钟设定(9600波特率) MOV DX,00HMOV AX,CLKMOV BX,1000MUL BXMOV BX,BPSDIV BXMOV DX,00HMOV BX,FACTORDIV BXMOV BX,AXMOV DX,TIMCTLMOV AL,00110110BOUT DX,ALMOV DX,TIMER0MOV AX,BXOUT DX,ALMOV AL,AHOUT DX,ALRETSETTIM ENDPINIT51 PROC ;8251初始化MOV DX,CTRL51MOV AL,00HMOV CX,3S1: CALL RELOOP S1MOV AL,40HCALL REMOV AL,4EHCALL REMOV AL,37HCALL RECALL DELAYRETINIT51 ENDPINIT50 PROC ;8250初始化MOV DX,LCR50MOV AL,80HCALL REMOV DX,DRL50MOV AL,DIVLCALL REMOV DX,DRH50MOV AL,DIVHCALL REMOV DX,LCR50MOV AL,03HCALL REMOV AL,00HCALL RECALL DELAYRETINIT50 ENDPRE PROCOUT DX,ALPUSH CXMOV CX,3REP1: LOOP REP1POP CXRETRE ENDPDELAY PROCMOV CX,0FFFFH DL1: LOOP DL1MOV CX,0FFFFH DL2: LOOP DL2RETDELAY ENDPCODE ENDSEND START。