超声波测距专用集成电路LM修订稿
- 格式:docx
- 大小:37.71 KB
- 文档页数:4
实验报告传感器应用技术课程名称超声波测距温度补偿班级 10电子1姓名百仪学号10732110指导教师承浩2011-2012学年第二学期(一)设计目的采用超声波测量距离的方法,实时检测现场温度用以实现实际波速的校准,减小温度对测距产生的误差,最终由LCD液晶显示所测距离、温度与对应的波速,测量围为7cm~1m,误差±2cm。
(二)设计方案超声波传声器结构简单、行能可靠、成本低、易集成,因此采用超声波测距的方式进行距离测量。
在常温下,超声波的传播速度为340m/s,但其传播速度V易受到空气中的温度、湿度、压强等因素的影响,其中温度的影响最大。
一般温度每升高1摄氏度,声速增加约为0.6m/s。
表1为超声波在不同温度下的波速值。
由此可见温度对超声波测距系统的影响是不可忽略的。
为了得到较为精确的测量结果,必须对波速进行温度补偿。
通过实验可获得波速与温度之间的经验模型:V=331.5+0.607T,T为现场温度,V为实际波速。
从式中可看出,要获得精确的波速值,必须首先获取现场温度T的大小。
本设计采用ds18b20检测现场温度,用以实现实际波速的校准。
超声波测距原理超声波传感器分机械方式和电气方式两类,它实际上是一种换能器,在发射端它把电能或机械能转换成声能,接收端则反之。
本次设计超声波传感器采用电气方式中的压电式超声波换能器,它是利用压电晶体的谐振来工作的。
它有两个压电晶片和一个共振板。
当它的两极外加脉冲信号,其频率等于压电晶片的固有振荡频率时,压电晶片将会发生共振,并带动共振板振动,产生超声波。
反之,如果两电极间未外加电压,当共振板接收到超声波时,将压迫压电晶片作振动,将机械能转换为电信号,就成为超声波接收器。
在超声波电路中,发射端输出一系列脉冲方波,脉冲宽度越大,输出的个数越多,能量越大,所能测的距离也越远。
超声波发射换能器与接收换能器其结构上稍有不同,使用时应分清器件上的标志。
超声波测距的方法有多种:如往返时间检测、相位检测法、声波幅值检测法。
LM1812超声波遥控专用集成电路LM1812是一种性能优良,且即能发送又能接收超声波的通用型超声波集成器件。
芯片内部包括:脉冲调制C类振荡器、高增益接收器、脉冲调制检测器及噪音抑制器。
它除了可用于遥控器、报警器、自动门控制及通信方面外,还可用于工业上的料位或液位的测量与控制、测距及测厚等方面,应用十分广泛。
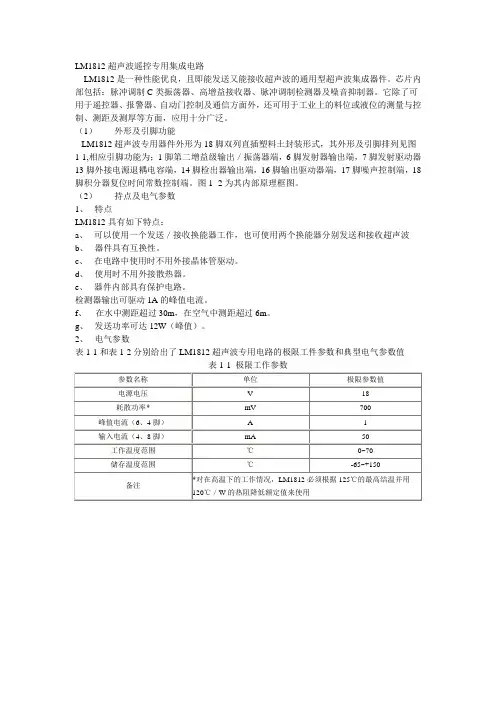
(1)外形及引脚功能LM1812超声波专用器件外形为18脚双列直插塑料土封装形式,其外形及引脚排列见图1-1,相应引脚功能为;1脚第二增益级输出/振荡器端,6脚发射器输出端,7脚发射驱动器13脚外接电源退耦电容端,14脚检出器输出端,16脚输出驱动器端,17脚噪声控制端,18脚积分器复位时间常数控制端。
图1 -2为其内部原理框图。
(2)持点及电气参数1、特点LM1812具有如下特点:a、可以使用一个发送/接收换能器工作,也可使用两个换能器分别发送和接收超声波b、器件具有互换性。
c、在电路中使用时不用外接晶体管驱动。
d、使用时不用外接散热器。
e、器件内部具有保护电路。
检测器输出可驱动1A的峰值电流。
f、在水中测距超过30m,在空气中测距超过6m。
g、发送功率可达12W(峰值)。
2、电气参数表1-1和表1-2分别给出了LM1812超声波专用电路的极限工件参数和典型电气参数值表1-1 极限工作参数工作原理LM1812第1脚外接L1、C1决定了电路发送或接收的工作频率,其工作频率fo=1/(2π ),最高可达325kHz。
当8脚为高电平时,L1、C1振荡槽路被切换为振荡模式,振荡信号经驱动放大后,由13脚及6脚输出(一般6、13脚之间接变压器,以便与超声波发送器阻抗匹配)。
为保证输出级不过载,使用时应在6脚测试一下电流,一般此脚峰值电流不能超过1A。
若需更大的功率,可采用外加脉冲放大器的方法来实现,输出电流可达5A;当8脚为高电平时、LM1812处于发送模式;8脚为低电平时,LM1812处于接收模式(8脚输入电流设计在1~10mA范围内)。
目录1.2 课题设计目的及意义日常生活应用发面:人们生活水平的提高,城市发展建设加快,城市车辆逐渐增多,因为停车不当而造成的交通事故也越来越多。
为了避免此类事故的发生,一个能够直观地测出汽车与障碍物之间的距离的装置就变得十分必要。
它可以及时将车辆与障碍物之间的距离反映出来,给司机以更准确的信息和更多的反应时间,减少事故的发生;军事应用方面:超声波声纳已广泛应用于侦查探测等方面,如何提高其测量精度已是正在着重研究的课题之一,相信在不久的将来,超声波测距一定会在侦查反侦察方面起到更大的作用;工业应用方面:超声波测距仪的设计方便了管道的距离探测,消除了一些空间方面的限制,在其测量精度得到提升后,对一些精密设备的测量也将起到良好的效果。
1.3 课题设计任务与要求设计一超声波测距仪,任务:1)了解超声波测距原理。
2)根据超声波测距原理,设计超声波测距器的硬件结构电路。
设计一超声波测距仪,要求:1)设计出超声波测距仪的硬件结构电路。
2)对设计的电路进行分析能够产生超声波,实现超声波的发送与接收,从而实现利用超声波方法测量物体间的距离。
3)对设计的电路进行分析。
4)以数字的形式显示测量距离。
2 方案选择的论证和选择2.1 设计方案一采用单片机来控制的超声波测距仪是先由单片机产生一个信号,经过信号线,把信号引入到与超声波发射器相连的信号引脚上,再由超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。
超声波在空气中的传播速度为340m/s ,根据计时器记录的时间t ,就可以计算出发射点距障碍物的距离(s),即:2/CT D ………………………………………2.1图2-1 采用单片机来控制的超声波测距仪我们做的是基于单片机的超声波测距仪。
用单片机控制超声波的发射、接受电路以及进行数据处理,再用液晶显示屏进行数据的显示。
因为声音的速度会随着温度的变化而改变,所以,我们增加了温控装置,即通过温度传感器(18B20),把当前的温度信息传给单片机,再通过一定的算法,得到当前的声音速度。
汽车倒车雷达系统的设计与实现吴琼;封维忠;马文杰【摘要】为避免汽车倒车过程中发生碰撞,设计一种基于单片机AT89C51的倒车雷达系统,介绍了超声波测距的基本原理,阐述了倒车雷达系统的结构组成、硬件电路设计以及软件设计,并在数据处理部分采用温度补偿消除温度时声速的影响,提高了测距精度.倒车距离采用LCD进行实时显示,并通过语音报警电路对不同距离段做出不同的语音提示.实验表明该倒车雷达系统在30~500 cm范围内可实现准确测距,具有可靠性较高、外围电路简单、实用性强等优点.【期刊名称】《现代电子技术》【年(卷),期】2009(032)009【总页数】4页(P191-194)【关键词】倒车雷达;超声波测距;AT89C51;LM1812;语音报警【作者】吴琼;封维忠;马文杰【作者单位】南京林业大学,信息科学技术学院,江苏,南京,210037;南京林业大学,信息科学技术学院,江苏,南京,210037;南京林业大学,信息科学技术学院,江苏,南京,210037【正文语种】中文【中图分类】TP230 引言随着中国经济的持续增长和汽车价格的持续下降,越来越多的家庭拥有了私家车。
在享受汽车给人们带来便利的同时,由于倒车而产生的问题也日益突出。
据初步调查统计,15%的汽车事故是由汽车倒车“后视”不良造成的[1]。
早期的倒车防撞仪可以测试车后一定距离范围的障碍物从而发出警报,后来发展到根据距离分段报警[2]。
随着人们对汽车驾驶辅助系统易用性要求的提高,对汽车倒车雷达的要求也越来越高。
本文设计的基于单片机AT89C51的倒车雷达,采用美国DALLAS 半导体公司生产的DS18B20单总线型数字温度传感器进行温度补偿提高了测距精度,采用OCMJ12232C_3液晶显示模块对车距进行实时显示和ISD4004语音芯片实现了倒车雷达语音报警的功能,并可以根据距离的不同做出不同的语音提示。
由于采用了超声波专用集成电路芯片LM1812,有效地提高了系统的可靠性和稳定性。
超声波测距专用集成电路LM1812LM1812超声波遥控专用集成电路LM1812是一种性能优良,且即能发送又能接收超声波的通用型超声波集成器件。
芯片内部包括:脉冲调制C类振荡器、高增益接收器、脉冲调制检测器及噪音抑制器。
它除了可用于遥控器、报警器、自动门控制及通信方面外,还可用于工业上的料位或液位的测量与控制、测距及测厚等方面,应用十分广泛。
(1)外形及引脚功能LM1812超声波专用器件外形为18脚双列直插塑料土封装形式,其外形及引脚排列见图1-1,相应引脚功能为;1脚第二增益级输出/振荡器端,6脚发射器输出端,7脚发射驱动器13脚外接电源退耦电容端,14脚检出器输出端,16脚输出驱动器端,17脚噪声控制端,18脚积分器复位时间常数控制端。
图1 -2为其内部原理框图。
(2)持点及电气参数1、特点LM1812具有如下特点:a、可以使用一个发送/接收换能器工作,也可使用两个换能器分别发送和接收超声波b、器件具有互换性。
c、在电路中使用时不用外接晶体管驱动。
d、使用时不用外接散热器。
e、器件内部具有保护电路。
检测器输出可驱动1A的峰值电流。
f、在水中测距超过30m,在空气中测距超过6m。
g、发送功率可达12W(峰值)。
2、电气参数表1-1和表1-2分别给出了LM1812超声波专用电路的极限工件参数和典型电气参数值表1-1 极限工作参数(3)工作原理LM1812第1脚外接L1、C1决定了电路发送或接收的工作频率,其工作频率fo=1/(2π ),最高可达325kHz。
当8脚为高电平时,L1、C1振荡槽路被切换为振荡模式,振荡信号经驱动放大后,由13脚及6脚输出(一般6、13脚之间接变压器,以便与超声波发送器阻抗匹配)。
为保证输出级不过载,使用时应在6脚测试一下电流,一般此脚峰值电流不能超过1A。
若需更大的功率,可采用外加脉冲放大器的方法来实现,输出电流可达5A;当8脚为高电平时、LM1812处于发送模式;8脚为低电平时,LM1812处于接收模式(8脚输入电流设计在1~10mA范围内)。
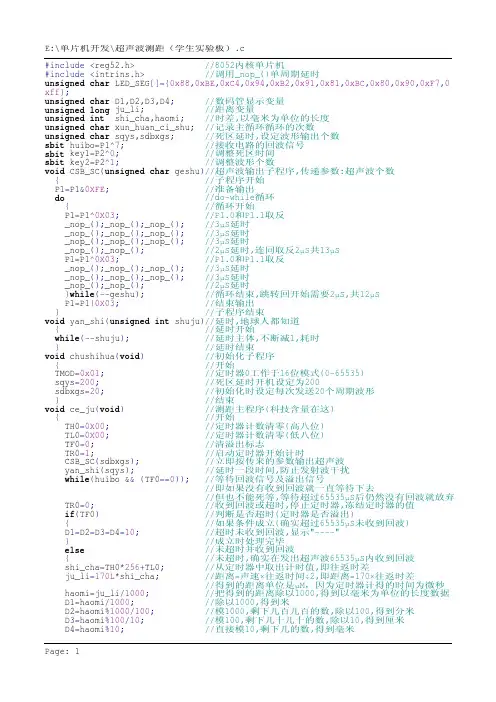
#include <r eg52.h>//8052内核单片机#include <intrins.h>//调用_nop_()单周期延时unsigned char L ED_SEG[]={0x88,0xBE,0xC4,0x94,0xB2,0x91,0x81,0xBC,0x80,0x90,0xF7,0 xff};unsigned char D1,D2,D3,D4;//数码管显示变量unsigned long j u_li;//距离变量unsigned int s hi_cha,haomi;//时差,以毫米为单位的长度unsigned char x un_huan_ci_shu;//记录主循环循环的次数unsigned char sqys,sdbxgs;//死区延时,设定波形输出个数sbit huibo=P1^7;//接收电路的回波信号sbit k ey1=P2^0;//调整死区时间sbit k ey2=P2^1;//调整波形个数void C SB_SC(unsigned char geshu)//超声波输出子程序,传递参数:超声波个数{//子程序开始P1=P1&0XFE;//准备输出do//do-while循环{//循环开始P1=P1^0X03;//P1.0和P1.1取反_nop_();_nop_();_nop_();//3µS延时_nop_();_nop_();_nop_();//3µS延时_nop_();_nop_();_nop_();//3µS延时_nop_();_nop_();//2µS延时,连同取反2µS共13µSP1=P1^0X03;//P1.0和P1.1取反_nop_();_nop_();_nop_();//3µS延时_nop_();_nop_();_nop_();//3µS延时_nop_();_nop_();//2µS延时}while(--geshu);//循环结束,跳转回开始需要2µS,共12µSP1=P1|0X03;//结束输出}//子程序结束void y an_shi(unsigned int shuju)//延时,地球人都知道{//延时开始while(--shuju);//延时主体,不断减1,耗时}//延时结束void chushihua(void)//初始化子程序{//开始TMOD=0x01;//定时器0工作于16位模式(0-65535)sqys=200;//死区延时开机设定为200sdbxgs=20;//初始化时设定每次发送20个周期波形}//结束void c e_ju(void)//测距主程序(科技含量在这){//开始T H0=0X00;//定时器计数清零(高八位)T L0=0X00;//定时器计数清零(低八位)T F0=0;//清溢出标志T R0=1;//启动定时器开始计时C SB_SC(sdbxgs);//立即按传来的参数输出超声波y an_shi(sqys);//延时一段时间,防止发射波干扰while(huibo && (T F0==0));//等待回波信号及溢出信号//即如果没有收到回波就一直等待下去//但也不能死等,等待超过65535µS后仍然没有回波就放弃T R0=0;//收到回波或超时,停止定时器,冻结定时器的值if(T F0)//判断是否超时(定时器是否溢出){//如果条件成立(确实超过65535µS未收到回波)D1=D2=D3=D4=10;//超时未收到回波,显示"----"}//成立时处理完毕else//未超时并收到回波{//未超时,确实在发出超声波65535µS内收到回波s hi_cha=T H0*256+T L0;//从定时器中取出计时值,即往返时差j u_li=170L*s hi_cha;//距离=声速×往返时间÷2,即距离=170×往返时差//得到的距离单位是µM,因为定时器计得的时间为微秒haomi=j u_li/1000;//把得到的距离除以1000,得到以毫米为单位的长度数据D1=haomi/1000;//除以1000,得到米D2=haomi%1000/100;//模1000,剩下几百几百的数,除以100,得到分米D3=haomi%100/10;//模100,剩下几十几十的数,除以10,得到厘米D4=haomi%10;//直接模10,剩下几的数,得到毫米}//未超时处理完毕}//测距子程序处理完毕void L ED_SCAN(void)//数码管扫描子程序{//扫描程序开始P2=P2|0XF0;//通过或操作将P2高四位置1,关闭数码管①P0=L ED_SEG[D2];//输出段码在P0口②P2=P2&0xBF;//通过与的方式将P2.6变成低电平,打开D1③y an_shi(500);//延时一段时间④P2=P2|0XF0;//同①P0=L ED_SEG[D3];//同②P2=P2&0xDF;//类似③y an_shi(500);//同④P2=P2|0XF0;//同①P0=L ED_SEG[D4];//同②P2=P2&0xEF;//类似③y an_shi(500);//同④P2=P2|0XF0;//同①P0=0X7F&L ED_SEG[D1];//同②,但还要跟0X7F进行与运算,将小数点位变0 P2=P2&0x7F;//类似③y an_shi(500);//同④}//扫描程序结束void main(void)//主程序{//主程序开始chushihua();//初始化,设置定时器工作模式while(1)//主循环{//主循环开始L ED_SCAN();//扫描数码管x un_huan_ci_shu++;//主循环每循环一次,变量加一if(x un_huan_ci_shu>=5)//每循环5次,就进行一次测距,控制测距间隔时间 {//已达5次主循环P2=P2|0XF0;//关闭数码管,避免某个数码管长时间被点亮ce_ju();//调用测距子程序进行测距xun_huan_ci_shu=0;//循环计数变量清零}//测距间隔时间控制处理完毕if(!k ey1)//死区延时按钮被按下{//按键处理开始sqys=sqys+5;//死区延时增加if(sqys>250){sqys=0;}//越界检测并抓回D1=11;//关闭第一个数码管D2=sqys/100;//获得百位D3=sqys%100/10;//获得十位D4=sqys%10;//获得各位while(!k ey1)//按键是否持续按下{//循环开始,等待按键松开L ED_SCAN();//如果没有松开,扫描数码管,显示死区延时}//循环尾}//按键处理结束,按键已松开if(!k ey2)//波形个数按钮被按下{//按键处理开始sdbxgs=sdbxgs+1;//输出波形数量增加if(sdbxgs>100){sdbxgs=0;}//越界检测并抓回D1=11;//关闭第一个数码管D2=sdbxgs/100;//获得百位D3=sdbxgs%100/10;//获得十位D4=sdbxgs%10;//获得各位while(!k ey2)//按键是否持续按下{//循环开始,等待按键松开L ED_SCAN();//如果没有松开,扫描数码管,显示发波个数}//循环尾}//按键处理结束,按键已松开}//主循环结束}//主程序结束。
本科毕业设计(论文) 题目基于单片机的超声波测距仪设计毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日注意事项1.设计(论文)的内容包括:1)封面(按教务处制定的标准封面格式制作)2)原创性声明3)中文摘要(300字左右)、关键词4)外文摘要、关键词5)目次页(附件不统一编入)6)论文主体部分:引言(或绪论)、正文、结论7)参考文献8)致谢9)附录(对论文支持必要时)2.论文字数要求:理工类设计(论文)正文字数不少于1万字(不包括图纸、程序清单等),文科类论文正文字数不少于1.2万字。
目录摘要 (2)第一章系统总体设计方案 (4)1.1 超声波测距原理 (4)1.2 超声波测距系统 (4)第二章系统的硬件设计 (5)2.1 超声波发生电路 (5)2.2 超声波接收电路 (6)2.3 温度的补偿 (8)2.4 LED动态显示电路 (8)第三章系统软件设计 (9)3.1 主程序结构 (10)3.2 中断程序结构 (11)3.3回波接收程序 (11)第四章误差分析 (12)4.1.时间误差 (12)4.2.超声波传播速度误差 (12)第五章调试 (12)第六章整机原件清单 (13)第七章总结 (13)7.1设计任务完成情况 (13)7.2 心得体会 (14)参考文献 (15)附录一 (16)附录二 (17)附录三 (18)摘要高度定位控制和测量系统也就是我们常说的超声波测距。
由于超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声波经常用于距离的测量,如测距仪和物位测量仪等都可以通过超声波来实现。
而电子技术及压电陶瓷材料的发展,使高度定位控制和测量系统得到了迅速的发展。
超声测距是一种非接触式的检测技术。
与其它方法相比,它不受光线、被测物处于黑暗、有灰尘、烟雾、电磁干扰、有毒等恶劣的环境下有一定的适应能力。
因此在液位测量、机械手控制、车辆自动导航、物体识别等有广泛应用。
特别是应用于空气测距,由于空气中波速较慢,其回波信号中包含的沿传播方向上的结构信息很容易检测出来,具有很高的分辨率,因而其准确度也较其它方法为高;而且超声波传感器具有结构简单、体积小、信号处理可靠等特点。
关键字:传感器、测距、测量系统、设计、高度定位PICKHighly positioning control and measurement system is also we often say the ultrasonic ranging. Due to the strong, the energy consumption of ultrasonic directivity slowly in the medium of communication, distance, and is often used to measure the distance of ultrasonic, such as rangefinder and material level measurement instrument etc can all through the ultrasonic. And electronic technology and the development of piezoelectric ceramic materials, high positioning control and measuring systems have been developed rapidly.Ultrasonic ranging is a non-contact detection technologies. Compared with other methods, it is light and darkness, the analyte in dust, smoke, electromagnetic interference, toxic etc harsh environments have certain ability to adapt. Therefore, in robot control level measurement, vehicle navigation, automatic object recognition is widely used. Especially the application in the air, the air velocity range due to low, the echo signal along the direction of propagation of contains information on the structure, very easily with high resolution, and its accuracy is higher than other methods for, And the ultrasonic sensor has simple structure, small volume, the characteristic such as being reliable signal processing.Key words: sensor, and measurement system, the design, the high position第一章系统总体设计方案1.1 超声波测距原理超声波测距的原理是利用超声波在空气中的传播速度为已知,测量声波在发射后遇到障碍物反射回来的时间,根据发射和接收的时间差计算出发射点到障碍物的实际距离。
0 引言目前,汽车车辆测距方法主要有:超声波测距、激光测距、雷达测距等三种。
采用超声波测距电路电子技术具有测距精确、灵敏度高、成本低、易于做到实时控制等优点,在汽车倒车预警测距电器装置中得到了广泛的应用。
汽车超声波测距电子电路技术,主要是解决汽车行驶的安全距离问题,超过安全距离,超声波测距防碰撞系统立即报警以至自动采取减速措施,使车辆处于安全状态。
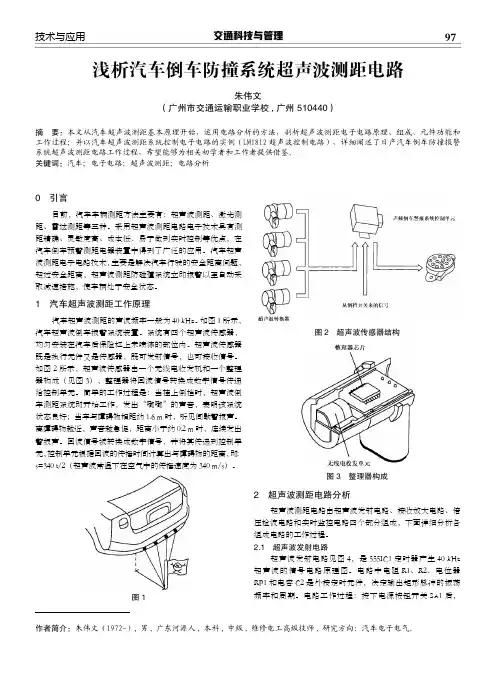
1 汽车超声波测距工作原理汽车超声波测距的声波频率一般为40 kHz。
如图1所示,汽车超声波倒车报警系统装置。
系统有四个超声波传感器,均匀安装在汽车后保险杠上未喷漆的部位内。
超声波传感器既是执行元件又是传感器,既可发射信号,也可接收信号。
如图2所示,超声波传感器由一个无线电收发机和一个整理器构成(见图3),整理器将回波信号转换成数字信号传递给控制单元。
简单的工作过程是:当挂上倒挡时,超声波倒车测距系统即开始工作,发出“嘟嘟”的声音,表明该系统状态良好;当车与障碍物相距约1.6 m 时,听见间歇警报声。
离障碍物越近,声音越急促,距离小于约0.2 m 时,连续发出警报声。
回波信号被转换成数字信号,并将其传递到控制单元,控制单元根据回波的传播时间计算出与障碍物的距离,即:s=340 t/2(超声波常温下在空气中的传播速度为340 m/s)。
图1图2 超声波传感器结构图3 整理器构成2 超声波测距电路分析超声波测距电路由超声波发射电路、接收放大电路、倍压检波电路和实时监控电路四个部分组成,下面详细分析各组成电路的工作过程。
2.1 超声波发射电路超声波发射电路见图4,是555IC1定时器产生40 kHz 超声波的信号电路原理图。
电路中电阻R1、R2、电位器RP1和电容C2是外接定时元件,决定输出矩形脉冲的振荡频率和周期。
电路工作过程:按下电源按钮开关SA1后,作者简介:朱伟文(1972-),男,广东河源人,本科,中级,维修电工高级技师,研究方向:汽车电子电气。
浅析汽车倒车防撞系统超声波测距电路朱伟文(广州市交通运输职业学校,广州 510440)摘 要:本文从汽车超声波测距基本原理开始,运用电路分析的方法,剖析超声波测距电子电路原理、组成、元件功能和工作过程;并以汽车超声波测距系统控制电子电路的实例(LM1812超声波控制电路),详细阐述了日产汽车倒车防撞报警系统超声波测距电路工作过程,希望能够为相关初学者和工作者提供借鉴。
超声波测距超声测距该电子产品-超声测距仪是在按键的步进控制下实现在30cm~120cm的距离探测,并具有数码管实时显示探测距离值功能,设定距离值报警功能,手动调整报警范围等功能。
1.硬件电路原理设计该超声测距仪其硬件电路框图如图1所示(虚线框图电路不在机器内部PCB 电路板上)。
整个电路可分为电路板供电电路,超声波发射接收电路,控制、显示及报警电路三个大的部分。
交流220V的市电经经变压、整流滤波、稳压的处理后输出±12V和+5V的恒定直流电压供应整个电路各个部分电源使用。
脉冲产生电路产生的40KHz的脉冲信号经驱动电路驱动功率后进如超声波发射器,让其发出超声波。
超声波接收器接受到发射器发出的超声波信号后经信号方大、处理比较后进入单片机微控制器,单片机将进行计算分析后在数码管显示模块显示出当前测量距离值。
并与从按键处设定的报警上下限值进行比较,当超出其所设定值时,报警电路将启动,红色警报灯点亮。
图1 硬件电路框图下面将分别按照上面陈述的电路分三个部分进行分析,图2是其电路原理图图2 硬件电路原理图1.1 电路板供电电路设计电路板供电电路如图2所示,220V的市电经变压器变压后输出两路交流15V 电压,此电压经整流、滤波处理后输出±15V直流电压,分别经三端集成稳压芯片U1(7812),U2(7912),输出恒定的+12V电压和-12V电压,这两路电压提供运放芯片所需电源及PCB板电路部分需要电压。
+12V电压经U3(7805)后输出恒定+5V电压,供应单片机、555芯片等芯片所需电源。
图2 电路板供电电路原理图1.2超声波发射接收模块设计超声波发射接收模块电路如图4所示,单片机PD7端口控制脉冲产生电路的启动与否,脉冲产生电路由555芯片接成多谐振荡器,选取合适的元器件参数,U4(555芯片)第三脚将输出40KHz的矩形波脉冲信号,此信号经反相器U5(CD4049)接成的驱动电路后进入超声波发射器,由电压信号转换为机械信号,发射出超声波。
超声波测距摘要该超声测距系统采用芯片STC89C52作为系统的主控制器,利用NE555作为本系统的脉冲发射源,结合3位7段数码管液晶显示,达到了较大的测试距离和较高的测量精度,并能实时显示且无明显失真。
关键字: 超声波测距实时第1章设计题目与要求1.1 设计要求采用压电式超声波换能器,使用单片机作为控制器,完成超声波测距仪的软硬件设计。
1.2 基本要求:(1)具有反射式超声波测距功能,测量距离0.1m~3.0m;(2)测量距离精度:误差±1cm;(3) 利用LED数码管显示测试距离;(4)实时显示测量的距离,显示格式为:□.□□米第2章系统总体方案论证2.1 系统总体方案题目要求设计一个利用超声波反射原理测量距离的超声波测距仪,并且具有实时同步显示,由此本系统可以划分为发射、接收、显示、主控制模块共四大模块,如图2.1所示:图2.1系统基本方框图针对技术指标的需要,为使系统的测量距离更远、精度更高,提高系统的整体完善性,现对以上系统各个功能模块进行一一的方案论证:2.2 主控制模块2.2.1 主控制模块概述主控制器模块其实就是一个简化的嵌入式系统。
嵌入式系统一般指非PC系统,有计算机功能但又不称之为计算机的设备或器材。
它是以应用为中心,软硬件可裁减的,适应应用系统对功能、可靠性、成本、体积、功耗等综合性严格要求的专用计算机系统。
嵌入式系统的核心是嵌入式微处理器。
2.2.2 主控制模块方案选择根据以上知识,考虑到目前市场上比较常用的AVR、61、51三种微控制器,我们有如下三种方案可供选择。
方案一:AVR单片机AVR单片机种类丰富,有AT tiny、AT90S、ATmeg系列,各个系列又有不同的型号,价格较适中。
相对来说,比起51单片机来说资源较丰富,内部也有集成A/D ,有PWM 输出,但在系统进一步扩展方面不是很好,这类单片机主要应用于工业控制领域,在语音处理方面没有什么优势。
方案二:SPCE061A.凌阳单片机的资源相对来说比较丰富,32K ×16bitFlash ,两路D/A ,1个全双工异步串行口(UART )方便其跟其他为控制通信。
测控二班张国强单鹏安齐崇超声波测距的设计摘要随着科学技术的快速发展,超声波将在测距仪中的应用越来越广。
但就目前技术水平来说,人们可以具体利用的测距技术还十分有限,因此,这是一个正在蓬勃发展而又有无限前景的技术及产业领域。
展望未来,超声波测距仪作为一种新型的非常重要有用的工具在各方面都将有很大的发展空间,它将朝着更加高定位高精度的方向发展,以满足日益发展的社会需求,如声纳的发展趋势基本为:研制具有更高定位精度的被动测距声纳,以满足水中武器实施全隐蔽攻击的需要;继续发展采用低频线谱检测的潜艇拖曳线列阵声纳,实现超远程的被动探测和识别;研制更适合于浅海工作的潜艇声纳,特别是解决浅海水中目标识别问题;大力降低潜艇自噪声,改善潜艇声纳的工作环境。
无庸置疑,未来的超声波测距仪将与自动化智能化接轨,与其他的测距仪集成和融合,形成多测距仪。
随着测距仪的技术进步,测距仪将从具有单纯判断功能发展到具有学习功能,最终发展到具有创造力。
在新的世纪里,面貌一新的测距仪将发挥更大的作用。
本设计采用以AT89C51单片机为核心的低成本、高精度、微型化数字显示超声波测距仪的硬件电路和软件设计方法。
整个电路采用模块化设计,由主程序、中断程序、发射子程序、接收子程序、显示子程序等模块组成。
各探头的信号经单片机综合分析处理,实现超声波测距仪的各种功能。
在此基础上设计了系统的总体方案,最后通过硬件和软件实现了各个功能模块。
1.总体方案设计介绍本文所研究的超声波测距仪利用超声波指向性强、能量消耗缓慢、传播距离较远等优点,即用超声波发射器向某一方向发送超声波,同时在发射的时候开始计时,在超声波遇到障碍物的时候反射回来,超声波接收器在接收到反射回来的超声波时,停止计时。
设超声波在空气中的传播速度为V,在空气中的传播时间为T,汽车与障碍物的距离为S,错误!未指定书签。
S=VT/2,这样可以测出汽车与障碍物之间的距离,然后在LED显示屏上显示出来。
超声波测距电路图 This manuscript was revised by the office on December 22, 2012超声波测距电路图超声波测距电路原理和制作由于超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声波经常用于距离的测量,如测距仪和物位测量仪等都可以通过超声波来实现。
利用超声波检测往往比较迅速、方便、计算简单、易于做到实时控制,并且在测量精度方面能达到工业实用的要求,因此在移动机器人的研制上也得到了广泛的应用。
为了使移动机器人能自动避障行走,就必须装备测距系统,以使其及时获取距障碍物的距离信息(距离和方向)。
本文所介绍的三方向(前、左、右)超声波测距系统,就是为机器人了解其前方、左侧和右侧的环境而提供一个运动距离信息。
二、超声波测距原理1、超声波发生器为了研究和利用超声波,人们已经设计和制成了许多超声波发生器。
总体上讲,超声波发生器可以分为两大类:一类是用电气方式产生超声波,一类是用机械方式产生超声波。
电气方式包括压电型、磁致伸缩型和电动型等;机械方式有加尔统笛、液哨和气流旋笛等。
它们所产生的超声波的频率、功率和声波特性各不相同,因而用途也各不相同。
目前较为常用的是压电式超声波发生器。
2、压电式超声波发生器原理压电式超声波发生器实际上是利用压电晶体的谐振来工作的。
超声波发生器内部结构如图1所示,它有两个压电晶片和一个共振板。
当它的两极外加脉冲信号,其频率等于压电晶片的固有振荡频率时,压电晶片将会发生共振,并带动共振板振动,便产生超声波。
反之,如果两电极间未外加电压,当共振板接收到超声波时,将压迫压电晶片作振动,将机械能转换为电信号,这时它就成为超声波接收器了。
3、超声波测距原理超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。
超声波在空气中的传播速度为340m/s,根据计时器记录的时间t,就可以计算出发射点距障碍物的距离(s),即:s=340t/2图1 超声波传感器结构这就是所谓的时间差测距法。
墼蛰!福遣岔抚第2期iFuJI庙NONGJI1引言碍究与攘索超声波测距技术■福建农林大学金山学院郑志聪摘要:本文介绍了一种通过超声波反射实现的超声波测距技术.分析了使用超声波测距需要考虑的几个参数问题,并从超声波的发射和接收介绍了这种超声波测距技术的应用。
关键词:超声波单片机测距超声波是一种频率超过20KHz的机械渡。
超声波作为一种特殊的声波.同样具有声波传输的基本物理特性——反射、折射、干涉、衍射、散射。
超声波具有方向性集中、振幅小、加速度大等特点.可产生较大力量.并且在不同的媒质介面。
超声波的大部分能量会反射。
利用反射这一性质.在金属。
非金属中用来探测缺陷的位置和性质.从而对钢板、锻件、焊缝、混凝土、人造石磨等进行探伤检验:在水中.根据反射波可以探测潜水艇和鱼群。
测量海底深度以及探查海底底层等:在人体中则可以协助临床诊断疾病(如肝脓肿、肿瘤、胆结石等)和探测胎儿等.2超声波测距超声波是一种振动频率高于声波的机械波.由换能晶片在电压的激励下发生振动产生的。
它具有频率高、波长短、绕射现象小,特别是方向性好,能够成为射线而定向传播等特点。
超声波对液体、同体的穿透本领很大。
尤其是在阳光不透明的固体中.它可穿透几十米的深度。
超声波碰到杂质或分界面会产生显著反射,形成反射成回波.碰到活动物体能产生多普勒效应。
2.1超声波的测距原理超声测距使用脉冲反射式.即利用超声的反射特性。
如图l所示.超声波测距原理是通过超声波发射传感器图1超声波测距原理障埘物向某一方向发射超声波.在发射时刻的同时开始计时。
超声波在空气中传播.途中碰到障碍物就立即返回来。
超声波接收器收到反射波就停止计时。
常温下超声波在空气中的传播速度为C:340m/s.根据计时器记录的时间t,就可以计算出发射点距障碍物的距离(S)。
即:S=C4t/2。
2.2系统主要考虑参数2.2.1声速声速的精确程度线性的决定了测距系统的测量精度。
传播介质中声波的传播速度随温度、杂质含量和介质压力的变化而变化。
目录1.目录 (1)2.摘要 (2)3.引言 (3)4. 超声波测距系统设计 (4)4.1超声波测距的原理 (4)4.2超声波测距系统电路的设计 (5)4.2.1 总体设计方案 (5)4.2.2发射电路的设计 (6)4.2.3接收电路的设计 (7)4.2.4显示模块的设计 (8)4.3超声波测距系统的软件设计 (9)4.4小结............................................................................................................................................错误!未定义书签。
5绪论 (11)5.1课题背景,目的和意义 (11)5.2超声波测距方案 (11)5.2.1基于单片机的超声波测距系统 (11)5.3课题主要内容 (12)6 超声波传感器 (13)6.1超声波传感器的原理与特性 (13)6.1.1原理 (13)6.1.2特性 (15)6.2超声波传感器的检测方式 (17)6.3超声波传感器系统的构成 (18)6.4小结 (19)7 AT89C51单片机简介 (20)7.1单片机基础知识 (20)7.1.1单片机的内部结构 (20)7.1.2单片机的基本工作原理 (23)7.2单片机的分类及发展 (24)7.3单片机AT89C51的特性 (26)7.4小结 (29)8. 电路调试及误差分析 (30)8.1电路的调试 (30)8.2系统的误差分析 (30)8.2.1声速引起的误差 (30)8.2.2单片机时间分辨率的影响 (31)8.4小结 (28)结论 (29)致谢词 (29)参考文献 (30)附录 (31)摘要超声波具有指向性强,能量消耗缓慢,传播距离较远等优点,所以,在利用传感器技术和自动控制技术相结合的测距方案中,超声波测距是目前应用最普遍的一种,它广泛应用于防盗、倒车雷达、水位测量、建筑施工工地以及一些工业现场。
超声波测距无线传输系统摘要:本系统利用声波反射原理,以MSP430单片机作为控制核心,实现超声波的发射和接收,通过测量超声波在发射源和被测物体间的传播时间来计算被测物体与发射探头间的距离,同时控制步进电机的转动, 实现正度45度的探测,并通过单片机无线收发功能传送数据,在单片机最小系统的液晶显示屏上显示所测物体的距离和坐标,可视化很强。
关键字:MSP430 超声波无线收发目录一、方案的论证1、40KHZ超声波波的产生方案一:由555产生一个稳定的40kHz载波信号,并由单片机控制它以产生间歇的发射波,此方法实现起来比较简单。
方案二:由非门进行振荡产生40kHz载波信号,此方案信号比较稳定,但需要特定频率的晶振,还可能需要分频电路,实现起来较为麻烦。
方案三:直接从FPGA分频得到40kHz的方波发射信号,频率稳定实现更为简单。
而且这种方法充分利用了FPGA资源,同时降低了硬件设计的复杂度,降低系统成本,但是考虑到功耗,我们并没用采用此方案。
方案四:在FPGA中设置一个触发器,时钟频率为80KHz,当其下降沿到来时对输出取反,得到40KHz的方波。
开始时,我们首先尝试用方案三,但后来发现方案三产生的方波不太稳定,考虑到本系统是用电池供电,所以后来改用了方案一,此方案硬件电路简单,功耗小。
3、超声波发射头的驱动方法方案一:将40K的脉冲经过反相器,用反相器驱动超声波发射头。
我们采用几个反相器串联和并联来提高电流,经试验后,此方案达不到要求。
方案二:采用三极管放大方案三:采用变压器方案四:超声波发射电路采用基于MAX232的方波发射电路电路的前几用74LS04非门输出正反相得40K的方波信号驱动MAX232后实现从TTL电平到RS232电平的DC-DC转换,输出+/-9V的电压方波,驱动超声波换能器。
由于发射到换能器的电压高,波形完整,因此可以达到很高的发射功率和效率,可以测量比较远的距离,同时用这个电路发射方波,电路工作稳定电路功耗很小,也适合单电源供电。
超声波测距专用集成电
路L M
集团档案编码:[YTTR-YTPT28-YTNTL98-UYTYNN08]
超声波测距专用集成电路L M1812
LM1812超声波遥控专用集成电路
LM1812是一种性能优良,且即能发送又能接收超声波的通用型超声波集成器件。
芯片内部包括:脉冲调制C类振荡器、高增益接收器、脉冲调制检测器及噪音抑制器。
它除了可用于遥控器、报警器、自动门控制及通信方面外,还可用于工业上的料位或液位的测量与控制、测距及测厚等方面,应用十分广泛。
(1)外形及引脚功能
LM1812超声波专用器件外形为18脚双列直插塑料土封装形式,其外形及引脚排列见图1-1,相应引脚功能为;1脚第二增益级输出/振荡器端,6脚发射器输出端,7脚发射驱动器13脚外接电源退耦电容端,14脚检出器输出端,16脚输出驱动器端,17脚噪声控制端,18脚积分器复位时间常数控制端。
图1-2为其内部原理框图。
(2)持点及电气参数
1、特点
LM1812具有如下特点:
a、可以使用一个发送/接收换能器工作,也可使用两个换能器分别发送和接收超声波
b、器件具有互换性。
c、在电路中使用时不用外接晶体管驱动。
d、使用时不用外接散热器。
e、器件内部具有保护电路。
检测器输出可驱动1A的峰值电流。
f、在水中测距超过30m,在空气中测距超过6m。
g、发送功率可达12W(峰值)。
2、电气参数
表1-1和表1-2分别给出了LM1812超声波专用电路的极限工件参数和典型电气参数值
表1-1极限工作参数
(3)工作原理
LM1812第1脚外接L 1、C 1决定了电路发送或接收的工作频率,其工作频率fo =1/(2π),最高可达325kHz 。
当8脚为高电平时,L 1、C 1振荡槽路被切换为振荡模式,振荡信号经驱动放大后,由13脚及6脚输出(一般6、13脚之间接变压器,以便与超声波发送器阻抗匹配)。
为保证输出级不过载,使用时应在6脚测试一下电流,一般此脚峰值电流不能超过1A 。
若需更大的功率,可采用外加脉冲放大器的方法来实现,输出电流可达5A ;当8脚为高电平时、LM1812处于发送模式;8脚为低电平时,LM1812处于接收模式(8脚输入电流设计在1~10mA 范围内)。
超声波接收器接收到的超声波信号经电容耦合由4脚输入,再经内部两级放大后同由1脚的谐振回路取出的信号一起送到检测器。
但由于此时噪声脉冲也同样被检测,所以要通过17脚外接R17、
C17进行滤波。
电阻R17和电容C17的时间常数一般为发送时间的10%~50%。
再经过积分延时,16脚和14脚变成低电平。
又当1脚上的电压变的小到不能触发检测器(小于1.4V)时,积分器经延时后复位,典型延时为1~10个发送频率周期。
当LM1812处于发送模式时,第二级放大器自动断开;当切换回接收模式时,第二级放大器并不马上接通,而是在由9脚外接电容引起一段延时后再接通。
这个延时使接收器暂时封闭(检测器也同时封闭),这样就为超声波发生器停止振荡提供了时间。
9脚外接电容C9的大小与延时有关,C9=0.1μF时,延时时间约为1ms;C9=
1μF时,延时时间约为10ms。
LM1812的第16脚提供与COMS兼容的逻辑输出,14脚为集电极开路输出,14脚的吸收电流超过1A时,在多重回波接收情况下就可能使芯片损坏。
因此11脚被设计成保护14脚功率输出端,其外接电容C11在14脚为低电平时(吸收电流)对内部电流进行积分。
当电容C11上电压达0.7V时,第二次打开工作。
若将11脚接地,则此功能失效。
超声波芯片lm1812应用电路。