arduino 模拟传感器 声音传感器
- 格式:doc
- 大小:1.13 MB
- 文档页数:4
和谐尚善同生共长教学活动设计授课教师教学内容:《我与机器人做游戏------我说你做》教学背景:我校在科技创新理念引领下,开展普及型的机器人教育。
我们发挥教研组优势,以草根定位自己,群策群力,在共同研究与学习中不断进步。
从无到有,由浅入深,教研组的各位教师相互勉励,共同承担,每个人都贡献自己的力量,使得百善学校机器人教育才得以开展起来。
我们一直走在摸索前进的道路上,课堂既是学生学习的舞台,也是教师成长的园地。
在机器人课堂教学的不断摸索中,我总结出:良好的学习习惯与充足的研究实践空间是学生获得能力与知识的关键。
现在,学生已经能够做到活而不乱、有序活动,轻声细语,互相关注,大胆细心,逐级解决问题等良好习惯。
给予学生成长进步的空间,是学生真正学会知识的保障,课上课下,我都会保证把空间留给学生,课堂上有了问题,同组间交流讨论,问题不能解决,提出来大家讨论,集思广益,教师也是其中一员,提出可行性办法,让学生在明确目标、反复实践中解决问题,体验成功的快乐,享受知识获得的过程。
教学理念:由“中国教育技术协会信息技术教育专业委员会”主持研制的《基础教育信息技术课程标准(2012版)》已经发布。
本课程标准小学部分的拓展模块为“机器人入门”,初中部分的拓展模块为“机器人设计与制作”。
机器人校本课程融合了计算机、机械、电子、通讯、控制、声、光、电、磁等多个学科领域的知识。
在活动中,既教会学生去思考,又让学生通过动手、动脑,培养综合素质。
学生通过亲手组装机器人系统、检测调整传感器、编制调试控制程序等工作,能够使学生的综合知识水平得到提高,使学生的动手能力、逻辑思维能力、综合应用能力、创新能力等都能得到全方位训练和提升,对进行学科知识渗透、培养素质全面的创新型人才具有重要的作用。
机器人进课堂后学生的学习兴趣高涨、综合素质提高、创新思维活跃,这正是素质教育的重要内容。
教材分析:本节课是认识传感器的第二课,在了解并应用了超声波传感器的基础上进行教学的,是机器人领域一个重要的传感器,是之后将传感器综合应用中的不可缺少的一个组件,对今后的机器人学习起着非常重要的作用。

sound sensor用法
Sound sensor(声音传感器)是一种常见的电子组件,它能够检测周围的声音
并将其转换为电信号。
这种传感器通常用于各种应用,例如智能家居、安防系统、声音分析等。
声音传感器的用法非常广泛。
以下是一些常见的用途:
1. 声音控制:声音传感器可以用于控制各种设备的开关,例如智能灯泡、扬声
器等。
通过设置特定的声音阈值,当声音达到或超过该阈值时,设备将自动打开或关闭。
2. 声音检测:声音传感器可以用于检测特定声音模式或事件,例如门铃声、破
碎声等。
当传感器检测到指定的声音模式时,它可以触发警报或发送通知。
3. 声音分析:声音传感器可以用于分析环境中的声音,例如噪音水平、频率范
围等。
这对于环境监测和噪音控制非常有用,例如在工厂或办公室中监测噪音水平。
4. 音乐互动:声音传感器可以用于与音乐互动,例如声音合成器或音乐播放器。
通过检测声音的强度、频率等参数,可以触发不同的音乐效果或响应。
声音传感器的原理是通过将声音转换为电信号。
它通常由一个麦克风和一个内
置的放大器组成。
当声音波通过麦克风时,麦克风将声音转换为微弱的电信号,然后放大器将信号放大为可以处理的电压信号。
总结起来,声音传感器是一种实用的电子组件,用于检测和转换环境中的声音。
其广泛的用途包括声音控制、声音检测、声音分析和音乐互动。
通过合理应用声音传感器,我们可以实现更智能和便捷的生活。

信息工程学院实验报告实验项目名称:实验四声音传感器实验实验时间:班级:姓名:学号:一、实验目的1. 学习CC2530 单片机GPIO 的使用。
2. 学习声音传感器的使用二、实验原理1. CC2530 节点与三轴加速度传感器的硬件接口(1). 声音传感器模块(MIC)引脚GND:外接GNDDO:数字量输出接口(0 和1)+5V:外接5V 电源(2). 传感器模块与2. GPIO(1). 简介CC2530单片机具有21个数字输入/输出引脚,可以配置为通用数字I/O或外设I/O信号,配置为连接到ADC、定时器或USART外设。
这些I/O口的用途可以通过一系列寄存器配置,由用户软件加以实现。
I/O端口具备如下特性:●21个数字I/O引脚●可以配置为通用I/O或外部设备I/O●输入口具备上拉或下拉能力●具有外部中断能力。
这21个I/O引脚都可以用作于外部中断源输入口。
因此如果需要外部设备可以产生中断。
外部中断功能也可以从睡眠模式唤醒设备。
(2). 寄存器简介本次实验中主要涉及到GPIO的寄存器如下:3. MIC 声音传感器(1). 概述声音传感器的作用相当于一个话筒(麦克风)。
它用来接收声波,显示声音的振动图象。
但不能对噪声的强度进行测量。
该传感器内置一个对声音敏感的电容式驻极体话筒。
声波使话筒内的驻极体薄膜振动,导致电容的变化,而产生与之对应变化的微小电压。
这一电压随后被转化成0-5V 的电压,经过比较器转换数字信号后,被数据采集器接受,并传送给计算机。
传感器特点:●具有信号输出指示。
●输出有效信号为低电平。
●当有声音时输出低电平,信号灯亮。
应用范围:●可以用于声控灯,配合光敏传感器做声光报警,以及声音控制,声音检测的场合。
(2). 使用方法本实验利用CC2530 的GPIO 读取声音传感器模块的检测结果输出端,当检测到一定的声音时,此输出端为低电平;未检测到一定的声音时,此输出端为高电平。
因此在实际应用中可以根据这种情况判断是否有声音在传感器附近产生。

很多人都知道“蝙蝠与雷达”的故事,说的是科学家研究发现,蝙蝠飞行时利用嘴巴发出超声波,然后用耳朵根据超声波反射回来的时间来判断前方是否有障碍物,以及距离障碍物多远。
于是利用这个原理发明了雷达。
随着科技的发展,超声波传感器已经得到了很广泛的应用。
首先来认识一下超声波传感器的外形,如下图所示:超声波传感器的引脚有5根,分别是:1、VCC电源端2、TRIG控制端3、ECHO接收端4、5:GND地线(也即电源的负极)现在,我们来学习最简单的一种使用方式,“电平触发”。
首先是引脚连接,1脚VCC和arduino板的VCC脚连接,5脚GND也和相应的GND连接,2脚TRIG可以连接到A板的任意一个数字端口,如3号口,3脚ECHO也一样,如连连至2号口。
这种连接方式的工作原理是:在TRIG端输出一个高电平,维持10us以上,同时传感器在ECHO端会输出一个高电平,一旦传感器接收到反射回来的超声波,ECHO就会跳转为低电平。
于是,可以根据此高电平的维持时间来计算阻碍物的距离。
计算公式是:距离=高电平维持时间x超声波传播速度/2。
有意思的是,在实际编程中,我们并不需要做很多事情,因为ardublock软件提供了一个超声波传感器模块,只要做一简单的设定,标明TRIG和ECHO各接哪个端口,就可以了,模块返回值就直接给出超声波传感器距离阻碍物的距离。
如下图所示程序,我们把测到的值给一个模拟变量t1,然后再增加一个串口输出模块,这个模块的作用是可以给编程软件设计的一个串口监视器发送信息,从而帮助我们实时观察程序的运行状态。
该串口监视器为arduino软件的TOOLS菜单下的Serial Monitor选项。
程序下载完成后,超声波传感器就立即工作了,马达检测到距离的阻碍物是213厘米,我把手靠近超声波传感器,马上显示出距离是5、18、20……,到现在为此,我们已经有了不少机器人的器官了,有可以发出信号的LED发光管,有能运动的马达,有检测阻碍物的超声波传感器,机器人的形状是什么样子呢?朋友,你想好了吗?我们还要给机器人添加什么功能呢?。
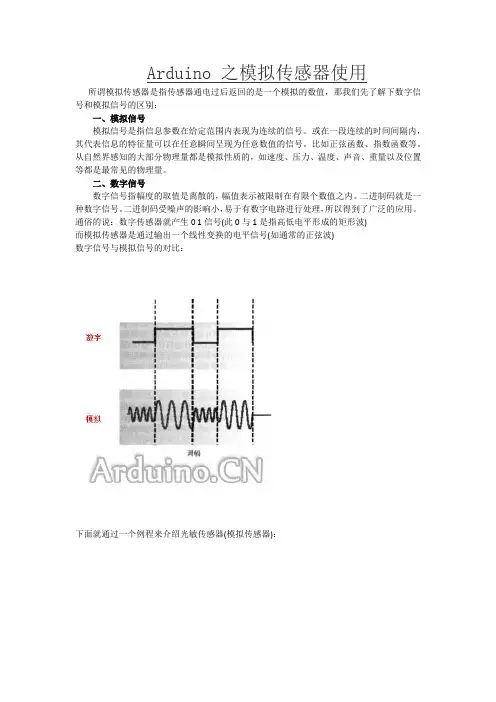
Arduino 之模拟传感器使用所谓模拟传感器是指传感器通电过后返回的是一个模拟的数值,那我们先了解下数字信号和模拟信号的区别:
一、模拟信号
模拟信号是指信息参数在给定范围内表现为连续的信号。
或在一段连续的时间间隔内,其代表信息的特征量可以在任意瞬间呈现为任意数值的信号。
比如正弦函数、指数函数等。
从自然界感知的大部分物理量都是模拟性质的,如速度、压力、温度、声音、重量以及位置等都是最常见的物理量。
二、数字信号
数字信号指幅度的取值是离散的,幅值表示被限制在有限个数值之内。
二进制码就是一种数字信号。
二进制码受噪声的影响小,易于有数字电路进行处理,所以得到了广泛的应用。
通俗的说:数字传感器就产生0 1信号(此0与1是指高低电平形成的矩形波)
而模拟传感器是通过输出一个线性变换的电平信号(如通常的正弦波)
数字信号与模拟信号的对比:
下面就通过一个例程来介绍光敏传感器(模拟传感器):
第一步:打开IED,找到例程AnologReadSerial,本例程用来读一个模拟传感器的读数字,然后用串口对输出值进行监视。
第二步:下载程序到arduino主控板,传感器输出端接到A0,然后连接正负接线端,打开串口便可观看测出的数据。
PS:arduino主控板上A0---A5是指ADC输入,所谓ADC值模数变换器,将读入的模拟值进行处理,将模拟数转换为数字,便于用户对数据进行处理,因为atmea328ADC是一个10位的寄存器,2的10次方=1024,所以当arduino读入值为默认的电压最大值5V时,analogRead 读到的值就是1024.。
声音传感器的工作原理
声音传感器是一种能够捕捉环境中声音信息的设备。
它的工作原理基于声音的传播和振动。
当声音传播到传感器附近时,声波会引起传感器的振动。
传感器内部通过某种材料或装置将声音的振动转化为电信号。
一旦声音信号转化为电信号,传感器就可以将这些信号发送到其他设备进行进一步处理或分析。
声音传感器的工作原理可以简单归纳为以下几个步骤:
1. 接收声波:声音传感器的接收部分用于接收周围环境中的声波。
传感器通常采用一个或多个麦克风来接收声音。
2. 声音振动传导:一旦声音波在麦克风附近产生,麦克风会感受到声波的振动。
这些振动会通过麦克风的结构传导到传感器的内部。
3. 转化为电信号:传感器内部的材料或装置会将声音的振动转化为电信号。
这可能涉及到一些装置,如压电材料或变压器等。
4. 信号处理与传输:一旦声音信号转化为电信号,传感器可以通过适当的电子电路对信号进行处理和放大。
然后,传感器可以将这些处理后的信号发送到其他设备进行进一步处理或分析。
总的来说,声音传感器的工作原理基于声音振动的捕捉和转化为电信号。
通过将声音转化为电信号,可以实现对声音的分析、处理和控制。
在各种应用中,声音传感器能够提供重要的环境音量、声波频率等信息,从而实现各种智能设备和系统的功能。
传感器与单片机接口技术的原理及应用指南概述:随着科技的快速发展,传感器与单片机接口技术在各行各业中得到了广泛的应用。
传感器是一种能够感知并转换物理量和化学量的装置,而单片机是一种集成了处理器、存储器和其他外围功能电路的微型计算机。
传感器与单片机接口技术充当了传感器与单片机之间的通信桥梁,使得传感器能够将感知到的信息传递给单片机处理,从而实现各种控制与监测系统。
一、传感器与单片机接口技术的原理1. 数字传感器与模拟传感器的接口方式传感器可以分为数字传感器和模拟传感器两种类型。
数字传感器输出的是数字信号,而模拟传感器输出的是模拟信号。
在接口技术方面,与单片机连接数字传感器通常采用串行通信接口,如UART、SPI和I2C,而与模拟传感器连接则需要模数转换器(ADC)进行信号转换。
2. 完整信号和简单信号的接口方式传感器常常输出的是模拟信号,而单片机通常使用数字信号进行处理。
因此,为了进行接口连接,需要将传感器输出的模拟信号转换为单片机可以接收的数字信号。
这可以通过进行信号调理和信号转换的方式来实现。
二、传感器与单片机接口技术的应用指南1. 温度传感器的接口技术及应用指南温度传感器是最常见的传感器之一,在许多领域中都有广泛的应用。
常见的温度传感器有热敏电阻、热电偶、热电阻和红外传感器等。
对于温度传感器的接口技术,可以使用模拟传感器接口连接到单片机的模数转换器上,也可以通过数字接口连接到单片机的串行通信接口上。
2. 光电传感器的接口技术及应用指南光电传感器是一种能够感知光照强度、光频率和光强度的传感器。
常见的光电传感器有光敏电阻、光电二极管和光纤传感器等。
光电传感器的接口技术可以使用模拟传感器接口连接到单片机的模数转换器上,也可以通过数字接口连接到单片机的串行通信接口上。
3. 加速度传感器的接口技术及应用指南加速度传感器是一种能够感知物体加速度变化的传感器。
常见的加速度传感器有压电式和微机械式传感器。
加速度传感器的接口技术可以使用模拟传感器接口连接到单片机的模数转换器上,也可以通过数字接口连接到单片机的串行通信接口上。
Arduino温度传感器全系列使用详解–Arduino实验室温度是我们经常接触到的物理量,能够被我们所直观的感受得到,例如天气凉了需要增添衣物,吃的食物太烫需要吹一吹,同时也需要对温度精确的测量,例如人类的正常体温是37.5℃,一个大气压下纯水沸腾时的温度是100℃,都需要我们去做实验来找出其中的科学。
下面我们将详细讲解几种常用的温度传感器,并利用Arduino来实现温度的测量,包括热敏电阻、LM35、DS18B20、DHT11和热电偶。
1.热敏电阻1.1 热敏电阻简介热敏电阻是电阻值随温度变化的半导体传感器,其典型特点是阻值对温度非常敏感,在不同的温度下会表现出不同的电阻值,从而根据表现的电阻值可逆推导得到其所处的环境温度值。
具有灵敏度高、体积小、热容量小、响应速度快、价格低廉等优点。
按照温度系数不同,可分为正温度系数热敏电阻(PTC)、负温度系数热敏电阻(NTC)和临界负温度系数热敏电阻(CTR)。
PTC随着温度升高,表现出的电阻值越大; NTC随着温度升高,表现出的电阻值越低;CTR具有负电阻突变特性,在某一温度下,电阻值随温度的增加急剧减小,具有很大的负温度系数。
由于具有不同的特性,热敏电阻的用途也是不同的。
PTC一般用作加热元件和过热保护;NTC一般用于温度测量和温度补偿;CTR一般用于温控报警等应用。
NTC的测温范围为-60~+300℃,标称阻值一般在1Ω至100MΩ之间,采用精密电阻和热敏电阻组合可扩大测量温度线性范围。
图1为NTC实物图,图中所示的为NTC 10D-9和NTC 5D-7。
NTC表示为负温度系数的热敏电阻,10D-9和5D-7代表其型号,10D-9代表了常温(25摄氏度)阻值10欧姆,直径9毫米,5D-7代表了常温(25摄氏度)阻值5欧姆,直径7毫米。
除了图1所示的形状之外,热敏电阻制成的探头有珠状、棒杆状、片状和薄膜等,封装外壳有玻璃、镍和不锈钢管等套管结构,如图2所示。
简易声音传感器的设计1、概述声音传感器是一种可以检测、测量并显示声音波形的传感器,广泛的用于日常生活、军事、医疗、工业、领海、航天等中,并且成为现代社会发展所不能缺少的部分。
在本设计中,只采用声音传感器的检测声音的能力.2、硬件设计1.1硬件组成该声音传感器由声音采集电路、信号比较电路和LED显示电路组成,主要芯片有51单片机和LM939电压比较器,工作电压为3.3V-5V.结构框图如图1.1所示,原理图如图1。
2所示。
图1.1 结构框图图1。
2 原理图1.2声音采集电路这部分由一个声音采集器,一个由RC振荡器构成的滤波器和一个放大器组成。
其中,声音采集器可以检测声音,滤波器可以减少外部干扰,放大器放大信号电压,以便进行处理.原理图如图1。
3。
图1.3 声音采集电路1.3信号比较电路信号比较部分采用LM393集成芯片实现功能,这一芯片的结构图如图1.4所示,由图可知,3管脚接声音采集电路,输入采集到的声音信号;管脚2接LED显示电路所给定的一个可调电压。
其中,声音信号与给定的电压比较,若大于该电压,则由1脚输出信号0;若低于给定的电压,则由1管脚输出信号1。
1管脚连接单片机p0。
1和LED显示电路的管脚1.图1。
4 LM393内部结构1.4LED显示电路该部分电路的原理图如图1.5所示,该电路由VCC给一个高电平,滑动变阻器R8用以调节供给比较器的电压阀值.当接电时,灯1亮;当比较器输出值为1时,由于电路两边都是高电平,所以灯2不亮,反之,灯2亮,这样就能反应出有无声音信号了。
3、程序编写单片机的作用是根据声音信号由串口发送字符串,51单片机串口通信的程序如下:#include <reg52.h>unsigned char date;#define uchar unsigned char#define uint unsigned intsbit key1=P0^1;/* 函数申明 --—-————--————-—————-——-—-—————————-——-—-—-----*/void delay(uint z);void Initial_com(void);/*********************************************************************************** 函数名称: delay(uint z)**函数功能:延时函数*********************************************************************************/void delay(uint z){uint i,j;for(i=z;i〉0;i--)for(j=110;j〉0;j--);}//******************************//*****串口初始化函数***********//******************************void Initial_com(void){EA=1; //开总中断ES=1; //允许串口中断ET1=1; //允许定时器T1的中断TMOD=0x20; //定时器T1,在方式2中断产生波特率 PCON=0x00; //SMOD=0SCON=0x50; // 方式1 由定时器控制TH1=0xfd; //波特率设置为9600TL1=0xfd;TR1=1; //开定时器T1运行控制位}//*************************//**********主函数*********//*************************main(){Initial_com();while(1){if(key1==0){delay(); //消抖动if(key1==0) //确认触发{SBUF=0X01;delay(200);}}if(RI){date=SBUF; //单片机接受SBUF=date; //单片机发送RI=0;}}}注:可通过改变程序中的红色部分来改变声音信号的输入管脚和串行口输出的内容。
arduino模拟传感器声⾳传感器声⾳传感器原型No comments · Posted by flamingoeda in 传感器有位同学曾经想过把声⾳信号经Arduino处理后,再传给另外⼀个设备进⾏处理,当时听了倒吸⼀⼝凉⽓,我想怕是俨然需要⼀个DSP系统才能处理他这样的要求吧。
虽然对声⾳的波形进⾏处理不太可能,但是在Arduino上接⼀个声⾳传感器,来感知环境声⾳的⼤⼩还是可能的吧。
原理不算太复杂,⽤⼀个话筒(electret microphone)收集声⾳,将过放⼤之后接到Arduino的模拟输⼊端⼝上,这样当⼈对着话筒说话的时候,在Arduino 的模拟输⼊端⼝上就能感知到电压的变化,说话声⾳越⼤,电压变化的幅度越⼤。
解释⼀下,由于声波是不断变化的,在模拟输⼊端⼝上读出的值相应地也是变化的,我们只能只根据某个时间点上读出的值来对声⾳进⾏判断,因为这时你有可能读到的是声波波形的最⼩值。
然⽽,我们的确可以根据某⼀时刻读到的声波的最⼤值,来判断此时声⾳的强度的:)在将原理研究清楚之后,我在万能板上⼿⼯焊接了⼀个声⾳传感器的原型板:该传感器同样有三根连线,5V和Gnd分别接Arduino的5V和Gnd两个引脚,Signal则要接在Arduino上的模拟输⼊端⼝上。
这⾥我⽤到的是Arduino Mini,正好测试⼀模拟输⼊接⼝:)为了查看实验效果,我搬出了墙⾓⾥的⽰波器,⾸先看看不对着话筒喊话时的波形图:这个是让我的声⾳传感器听MP3时的波形图:看起来还是有明显变化的。
有了这样的实验结果,再写程序的话就算是有所依据了:int soundPin = 0;int value = 0;void setup() {Serial.begin(9600);}void loop() {value = analogRead(soundPin);if (value > 400) {Serial.println(value, DEC);delay(300);}}上述程序不断地从模拟输⼊端⼝0上读⼊声⾳传感器的值,⼀当发现其值⼤于400,随即激活相应的动作。
产品使用说明书
产品名称:声音传感器模块 版本:3线制
用途:
声音感应检测
产品特点:
1 可以检测周围环境的声音强度,使用注意:此传感器只能识别声音的有无(根据震动原理)不能识别声音的大小或者特定频率的声音
2 灵敏度可调(图中蓝色数字电位器调节)
3 工作电压3.3V-5V
5 输出形式 数字开关量输出(0和1高低电平)
6 设有固定螺栓孔,方便安装
7 小板PCB尺寸:3.2cm * 1.7cm
使用说明
1声音模块对环境声音强度最敏感,一般用来检测周围环境的声音强度。
2 模块在环境声音强度达不到设定阈值时,OUT输出高电平,当外界环境声音强度超过设定阈值时,模块OUT输出低电平;
3 小板数字量输出OUT可以与单片机直接相连,通过单片机来检测高低电平,由此来检测环境的声音;
4 小板数字量输出OUT可以直接驱动本店继电器模块,由此可以组成一个声控开关;
模块接线说明
1 VCC 外接3.3V-5V电压(可以直接与5v单片机和3.3v单片机相连)
2 GND 外接GND
3 OUT 小板开关量输出接口(0和1)。
第三十九课Arduino 超声波传感器HC-SR04超声波传感器使用声纳来确定物体的距离,就像蝙蝠一样。
它提供了非常好的非接触范围检测,准确度高,读数稳定,易于使用,尺寸从2厘米到400厘米或1英寸到13英尺不等。
其操作不受阳光或黑色材料的影响,尽管在声学上,柔软的材料(如布料等)可能难以检测到。
它配有超声波发射器和接收器模块。
技术规格电源- + 5V DC静态电流- <2mA工作电流- 15mA有效角度- <15°测距距离- 2厘米-400厘米/1英寸-13英尺分辨率- 0.3厘米测量角度- 30度必需的组件你将需要以下组件:• 1 × Breadboard 面包板• 1 × Arduino Uno R3• 1 ×超声波传感器(HC-SR04)程序按照电路图进行连接,如下图所示。
草图在计算机上打开Arduino IDE软件。
使用Arduino语言进行编码控制你的电路。
通过单击“New”打开一个新的草图文件。
Arduino代码代码说明超声波传感器有四个端子:+5V,Trigger,Echo和GND,连接如下:•将+5V引脚连接到Arduino板上的+5v。
•将Trigger连接到Arduino板上的数字引脚7。
•将Echo连接到Arduino板上的数字引脚6。
•将GND连接到Arduino上的GND。
在我们的程序中,我们通过串口显示了传感器测量的距离,单位为英寸和厘米。
结果你将在Arduino串口监视器上看到传感器测量的距离,单位为英寸和厘米。
声音传感器原型
No comments · Posted by flamingoeda in 传感器
有位同学曾经想过把声音信号经Arduino处理后,再传给另外一个设备进行处理,当时听了倒吸一口凉气,我想怕是俨然需要一个DSP系统才能处理他这样的要求吧。
虽然对声音的波形进行处理不太可能,但是在Arduino上接一个声音传感器,来感知环境声音的大小还是可能的吧。
原理不算太复杂,用一个话筒(electret microphone)收集声音,将过放大之后接到Arduino的模拟输入端口上,这样当人对着话筒说话的时候,在Arduino 的模拟输入端口上就能感知到电压的变化,说话声音越大,电压变化的幅度越大。
解释一下,由于声波是不断变化的,在模拟输入端口上读出的值相应地也是变化的,我们只能只根据某个时间点上读出的值来对声音进行判断,因为这时你有可能读到的是声波波形的最小值。
然而,我们的确可以根据某一时刻读到的声波的最大值,来判断此时声音的强度的:)
在将原理研究清楚之后,我在万能板上手工焊接了一个声音传感器的原型板:
该传感器同样有三根连线,5V和Gnd分别接Arduino的5V和Gnd两个引脚,Signal则要接在Arduino上的模拟输入端口上。
这里我用到的是Arduino Mini,正好测试一模拟输入接口:)
为了查看实验效果,我搬出了墙角里的示波器,首先看看不对着话筒喊话时的波形图:
这个是让我的声音传感器听MP3时的波形图:
看起来还是有明显变化的。
有了这样的实验结果,再写程序的话就算是有所依据了:
int soundPin = 0;
int value = 0;
void setup() {
Serial.begin(9600);
}
void loop() {
value = analogRead(soundPin);
if (value > 400) {
Serial.println(value, DEC);
delay(300);
}
}
上述程序不断地从模拟输入端口0上读入声音传感器的值,一当发现其值大于400,随即激活相应的动作。
这里只是简单地将值从串口输出来,你完全可以根据自己的实际需要做相应的处理。
当然,到底需要设置多大的门限值是合适的,需要根据你自己的实际情况进行设置,多试几次你一定能够找到合适的值的
Arduino实验代码:
void setup()
{
Serial.begin(9600); // 打开串口,设置波特率为9600 bps
}
void loop()
{
int val;
val=analogRead(0); //传感器接于模拟口0
Serial.println(val,DEC);//从串口发送数据并换行
delay(100);
}
void setup()
{
Serial.begin(9600); // 打开串口,设置波特率为9600 bps }
void loop()
{
int val;
val=analogRead(0); //传感器接于模拟口0
Serial.println(val,DEC);//从串口发送数据并换行
delay(100);
}。