16 异步电机变压变频调速-开闭环实现
- 格式:pdf
- 大小:870.19 KB
- 文档页数:45


图6-23 电流滞环跟踪控制时的电流波形a) 电流波形b) 电压波形图6-25 电压空间矢量定义三个定子电压空间矢量A0u ,B0u ,C0u ,使它们的方向始终处于各相绕组的轴线上,而大小则随时间按正弦规律脉动,时间相位互相错开的角度也是°。
三相定子电压空间矢量的合成空间矢量s u 是一个旋转的空间矢量,它的幅倍,当电源频率不变时,为电气角速度作恒速旋转。
当某一相电压为最大值时,合成电压矢量在该相的轴线上。
合成空间矢量C0B0A0s u u u u ++=可以定义定子电流和磁链的空间矢量s I 和s Ψ。
电压与磁链空间矢量的关系用合成空间矢量表示的定子电压方程式:R s u =很低时,定子电阻压降所占的成分很小,可忽略不计,则定子合成电压与合成磁链dtd sΨ或⎰≈dt s s u Ψ。
当电动机由三相平衡正弦电压供电时,电动机定子磁链幅值恒定,以恒速旋转,磁链矢量顶端的运动轨迹呈圆形(称为磁链圆)。
6-26 旋转磁场与电压空间矢量的运动轨迹六拍阶梯波逆变器与正六边形空间旋转磁场种工作状态,6种工作状态是有效的,因为逆变器这时并没有输出电压,称为“零矢量”对于六拍阶梯波的逆变器,在其输出的每个周期中3/π时刻就切换一次工作状态(即换相)刻内则保持不变。
随着逆变器工作状态的切换,电压空间矢量的幅值不变,而相位直到一个周期结束。
在一个周期中6形成一个封闭的正六边形,如图6-28所示。
由电压空间矢量运动所形成的正六边形轨迹也可以看作是异步电动机定子磁设定子磁链空间矢量为1Ψ,在第一个3π期间,施加的电压空间矢量为内,产生一个增量依此类推,可以写成 Ψ∆的通式,i Ψ的方向决定于所施加的电压图6-31 逼近圆形时的磁链增量轨迹表示由电压空间矢量1u 和2u 的线性组合构成新的电压矢量θθsin cos s j u + 中,1t 处于1u ,2t 处于2u ,s u 与矢量图6-32 电压空间矢量的线性组合用相电压表示合成电压空间矢量的定义,把相电压的时间函数和空间相位分开γ20)(j C e t u ,︒=120γ,当各功率开关处于不同状态时,线电压可取值为⎢⎢⎣⎡ ⎝⎛+=⎥⎥⎦⎤⎪⎪⎭⎫ ⎝⎛+⎥⎦⎤⎪⎪⎭⎫ ⎝⎛+=010230201322321t T t U j e T t T t U e U d j d j d ππd U T t ⎪⎪⎭⎫022,s sin =θu d θsin , 由旋转磁场所需的频率决定,0T 与21t t +未必相等,来填补。
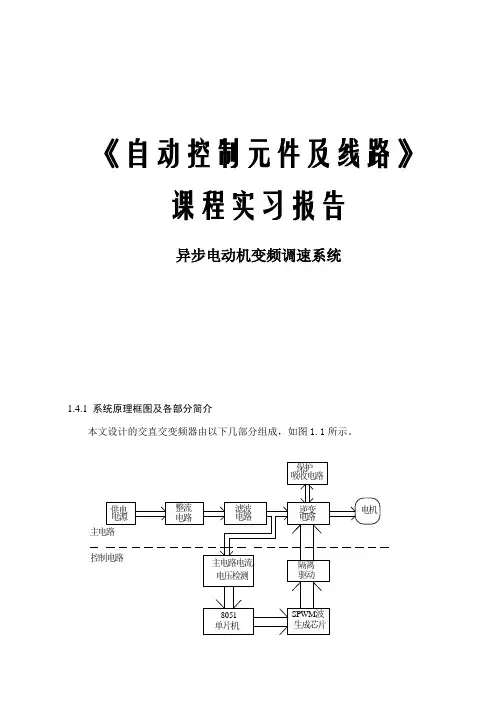
《自动控制元件及线路》课程实习报告异步电动机变频调速系统1.4.1 系统原理框图及各部分简介本文设计的交直交变频器由以下几部分组成,如图1.1所示。
图1.1 系统原理框图系统各组成部分简介:供电电源:电源部分因变频器输出功率的大小不同而异,小功率的多用单相220V,中大功率的采用三相380V电源。
因为本设计中采用中等容量的电动机,所以采用三相380V电源。
整流电路:整流部分将交流电变为脉动的直流电,必须加以滤波。
在本设计中采用三相不可控整流。
它可以使电网的功率因数接近1。
滤波电路:因在本设计中采用电压型变频器,所以采用电容滤波,中间的电容除了起滤波作用外,还在整流电路与逆变电路间起到去耦作用,消除干扰。
逆变电路:逆变部分将直流电逆变成我们需要的交流电。
在设计中采用三相桥逆变,开关器件选用全控型开关管IGBT。
电流电压检测:一般在中间直流端采集信号,作为过压,欠压,过流保护信号。
控制电路:采用8051单片机和SPWM波生成芯片SA4828,控制电路的主要功能是接受各种设定信息和指令,根据这些指令和设定信息形成驱动逆变器工作的信号。
这些信号经过光电隔离后去驱动开关管的关断。
1.4.2 变频器主电路方案的选定变频器最早的形式是用旋转发电机组作为可变频率电源,供给交流电动机。
随着电力半导体器件的发展,静止式的变频电源成为了变频器的主要形式。
静止式变频器从变换环节分为两大类:交-直-交变频器和交-交变频器。
1.交-交型变频器:它的功能是把一种频率的交流电直接变换成另一种频率可调电压的交流电(转换前后的相数相同),又称直接式变频器。
由于中间不经过直流环节,不需换流,故效率很高。
因而多用于低速大功率系统中,如回转窑、轧钢机等。
但这种控制方式决定了最高输出频率只能达到电源频率的1/3~1/2,所以不能高速运行。
2.交-直-交型变频器:交-直-交变频器是先把工频交流通过整流器变成直流,然后再直流变换成频率电压可调的交流,又称间接变频器,交-直-交变频器是目前广泛应用的通用变频器。
交流异步电动机变压变频调速系统设计与仿真异步电动机变压变频调速系统是一种常见的电动机调速系统,可以实现电动机转速的精确控制和调节。
本文将介绍异步电动机变压变频调速系统的设计和仿真。
首先,异步电动机的调速原理简要介绍。
异步电动机是一种常用的交流电动机,其转速通常由额定电压和频率决定。
通过改变电动机的电压和频率,可以实现对电动机的调速。
变压变频调速系统通过调节电压和频率的大小,改变电动机的转速。
在设计异步电动机变压变频调速系统之前,首先要确定电动机的参数。
电动机的参数包括额定功率、额定电压、额定电流等,这些参数可以从电动机的标牌上获取。
另外,还需要确定变压变频器的参数,包括额定电压范围、频率范围等。
这些参数将决定整个系统的性能。
设计异步电动机变压变频调速系统的关键是选取合适的变压变频器。
变压变频器是将电网的交流电转换为可调频率和可调电压的交流电的装置。
根据电动机的额定电压和变压变频器的额定电压范围,选取合适的变压变频器,以满足调速系统的要求。
设计异步电动机变压变频调速系统的下一步是进行系统的电路设计。
电路设计包括电动机的接线和变压变频器的接线。
电动机的接线要根据电动机的型号和相数来进行,确保电机的正常运行。
变压变频器的接线要根据变压变频器的接线图进行,确保变压变频器与电动机的连接正确。
完成电路设计后,还需要进行系统的控制设计。
控制设计包括电机的启动和停止控制、电机的转速控制等。
启动和停止控制一般采用按钮控制或者遥控控制,可以通过按钮或者遥控装置来启动和停止电动机。
转速控制一般采用PID控制器进行,通过调节变压变频器的输出电压和频率,来实现对电动机转速的控制和调节。
完成设计后,可以使用仿真软件进行系统的仿真。
常用的仿真软件有MATLAB/Simulink、PSIM等。
通过仿真可以验证系统的设计是否正确,并进行性能评估。
仿真结果可以用来优化系统的设计,提高系统的性能。
综上所述,异步电动机变压变频调速系统的设计和仿真是一个系统工程,需要从确定电动机和变压变频器的参数开始,进行电路设计和控制设计,最后进行仿真验证。
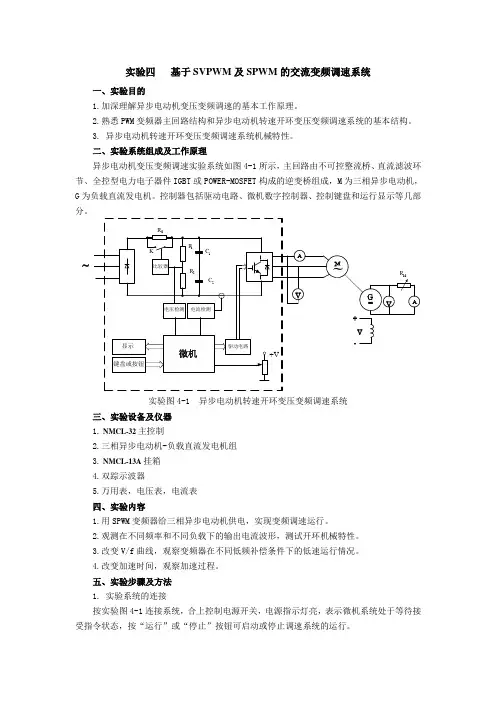
实验四基于SVPWM及SPWM的交流变频调速系统一、实验目的1.加深理解异步电动机变压变频调速的基本工作原理。
2.熟悉PWM变频器主回路结构和异步电动机转速开环变压变频调速系统的基本结构。
3.异步电动机转速开环变压变频调速系统机械特性。
二、实验系统组成及工作原理异步电动机变压变频调速实验系统如图4-1所示,主回路由不可控整流桥、直流滤波环节、全控型电力电子器件IGBT或POWER-MOSFET构成的逆变桥组成,M为三相异步电动机,G为负载直流发电机。
控制器包括驱动电路、微机数字控制器、控制键盘和运行显示等几部分。
~实验图4-1 异步电动机转速开环变压变频调速系统三、实验设备及仪器1. NMCL-32主控制2.三相异步电动机-负载直流发电机组3. NMCL-13A挂箱4.双踪示波器5.万用表,电压表,电流表四、实验内容1.用SPWM变频器给三相异步电动机供电,实现变频调速运行。
2.观测在不同频率和不同负载下的输出电流波形,测试开环机械特性。
3.改变V/f曲线,观察变频器在不同低频补偿条件下的低速运行情况。
4.改变加速时间,观察加速过程。
五、实验步骤及方法1. 实验系统的连接按实验图4-1连接系统,合上控制电源开关,电源指示灯亮,表示微机系统处于等待接受指令状态,按“运行”或“停止”按钮可启动或停止调速系统的运行。
2. 变频调速将负载直流发电机输出电路断开,按“运行”按钮使调速系统进入运行状态,通过给定电位器或键盘改给定频率,记录不同频率下三相异步电动机的空载转速和空载定子电流,并3.测试开环机械特性 (1) 基频开环机械特性测试接通负载直流发电机输出电路,并将负载电阻调到最大,按“运行”按钮使变频器进入运行,将频率给定设定为50Hz ,逐步减小负载电阻,记录异步电动机的转速、定子电流和负载直流发电机的输出电压和电流。
实验过程中应使定子电流小于1.2倍的额定电流,如调速系统不能带载启动,可先断开负载直流发电机励磁,待启动后再接通励磁。
变频器是利用电力半导体器件的通断作用将工频电源变换为另一频率的电能控制装置。
我们现在使用的变频器主要采用交—直—交方式(VVVF变频或矢量控制变频),先把工频交流电源通过整流器转换成直流电源,然后再把直流电源转换成频率、电压均可控制的交流电源以供给电动机。
变频器的电路一般由整流、中间直流环节、逆变和控制4个部分组成。
整流部分为三相桥式不可控整流器,逆变部分为IGBT三相桥式逆变器,且输出为PWM波形,中间直流环节为滤波、直流储能和缓冲无功功率。
变频器选型:变频器选型时要确定以下几点:1) 采用变频的目的;恒压控制或恒流控制等。
2) 变频器的负载类型;如叶片泵或容积泵等,特别注意负载的性能曲线,性能曲线决定了应用时的方式方法。
3) 变频器与负载的匹配问题;I.电压匹配;变频器的额定电压与负载的额定电压相符。
II. 电流匹配;普通的离心泵,变频器的额定电流与电机的额定电流相符。
对于特殊的负载如深水泵等则需要参考电机性能参数,以最大电流确定变频器电流和过载能力。
III.转矩匹配;这种情况在恒转矩负载或有减速装置时有可能发生。
4) 在使用变频器驱动高速电机时,由于高速电机的电抗小,高次谐波增加导致输出电流值增大。
因此用于高速电机的变频器的选型,其容量要稍大于普通电机的选型。
5) 变频器如果要长电缆运行时,此时要采取措施抑制长电缆对地耦合电容的影响,避免变频器出力不足,所以在这样情况下,变频器容量要放大一档或者在变频器的输出端安装输出电抗器。
6) 对于一些特殊的应用场合,如高温,高海拔,此时会引起变频器的降容,变频器容量要放大一挡。
变频器控制原理图设计:1) 首先确认变频器的安装环境;I.工作温度。
变频器内部是大功率的电子元件,极易受到工作温度的影响,产品一般要求为0~55℃,但为了保证工作安全、可靠,使用时应考虑留有余地,最好控制在40℃以下。
在控制箱中,变频器一般应安装在箱体上部,并严格遵守产品说明书中的安装要求,绝对不允许把发热元件或易发热的元件紧靠变频器的底部安装。
一、填空题1. 直流调速系统用的可控直流电源有:旋转变流机组(G-M系统)、静止可控整流器(V-M 统)、直流斩波器和脉宽调制变换器(PWM)。
2. 转速、电流双闭环调速系统的起动过程特点是饱和非线性控制、准时间最优控制和转速超调。
3. 交流异步电动机变频调速系统的控制方式有恒磁通控制、恒功率控制和恒电流控制三种。
4. 变频器从结构上看,可分为交交变频、交直交变频两类,从变频电源性质看,可分为电流型、电压型两类。
5. 相异步电动机的数学模型包括:电压方程、磁链方程、转矩方程和运动方程。
6. 异步电动机动态数学模型是一个高阶、非线性、强耦合的多变量系统。
7. 常见的调速系统中,在基速以下按恒转矩调速方式,在基速以上按恒功率调速方式。
8. 调速系统的稳态性能指标包括调速范围和静差率。
9. 反馈控制系统的作用是:抵抗扰动,服从给定。
10. VVVF控制是指逆变器输出电压和频率可变的控制11、转速、电流双闭环调速系统当中,两个调节器采用串级联接,其中转速反馈极性为负反馈、电流反馈极性为负反馈。
12、直流斩波器的几种常用的控制方法:①T不变,变ton——脉冲宽度调制(PWM);②ton不变,变T——脉冲频率调制(PFM);③ton和T都可调,改变占空比——混合型。
13、转速、电流双闭环系统,采用PI调节器,稳态运行时,转速n取决于给定电压、ASR的输出量取决于负载电流。
14. 各种电力拖动自动控制系统都是通过控制电动机转速来工作的。
15. V-M系统中,采用三相整流电路,为抑制电流脉动,可采用的主要措施是设置平波电抗器。
16、在单闭环调速系统中,为了限制全压启动和堵转电流过大,通常采用电流截止负反馈。
17、在α=β配合控制的直流可逆调速系统中,存在的是直流平均环流,可用串接环流电抗器抑制。
18、采用PI调节器的转速、电流双闭环系统启动时,转速调节器经历不饱和、饱和、退饱和三种状态。
二、选择题1. 带有比例调节器的单闭环直流调速系统,如果转速的反馈值与给定值相等,则调节器的输出为(A )A、零;B、大于零的定值C、小于零的定值;D、保持原先的值不变2. 无静差调速系统的PI调节器中P部份的作用是(D )A、消除稳态误差;B、不能消除稳态误差也不能加快动态响应C、既消除稳态误差又加快动态响应;D、加快动态响应3. 异步电动机变压变频调速时,采用(B )控制方式,可获得一线性机械特性。
异步电动机变频、变压控制模式空载电流闭
环实验确定法
1、异步电机变频、变压调速时的机械特性曲线,只有在电机原设计恒定磁场的情况下,才能保持原工频机械特性不变;
2、也就是说,变频、变压机械特性曲线不变;
3、变频器V/F=定值控制模式的缺点是,低频段磁场减弱严重;
4、如果采用(V-IR)/F=定值控制模式,是一个与电机个性相关的参数,也就是说一台电机有这一台电机的控制参数;
5、所以变频器控制不同电机时(V-IR)/F=定值是不同的,如何确定?
6、因为异步电机空载电流就是励磁电流,所以在变频空载运行时,通过电压调节器,实现空载电流的闭环恒电流控制,就等于得到了这台电机的U=F(F)的函数关系;
7、这样,只要这台异步电机变频、变压负载运行时,变频、变压按U=F(F)的控制模式,就等于实现了异步电机恒磁场控制模式;。