实验四-异步电动机转速开环变压变频调速系统
- 格式:doc
- 大小:285.50 KB
- 文档页数:3
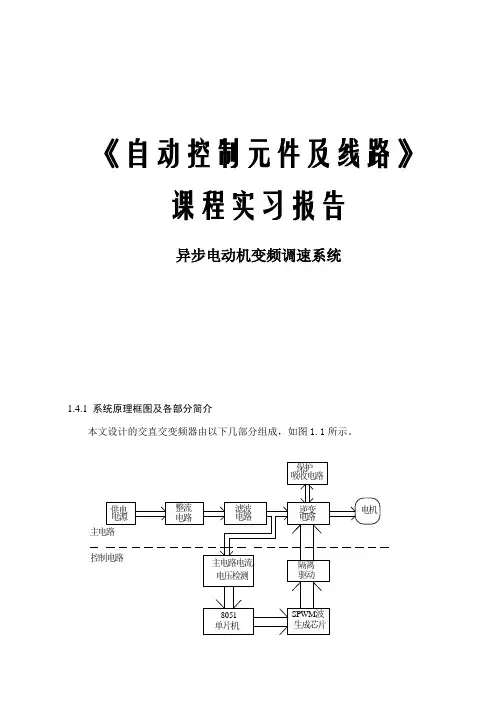
《自动控制元件及线路》课程实习报告异步电动机变频调速系统1.4.1 系统原理框图及各部分简介本文设计的交直交变频器由以下几部分组成,如图1.1所示。
图1.1 系统原理框图系统各组成部分简介:供电电源:电源部分因变频器输出功率的大小不同而异,小功率的多用单相220V,中大功率的采用三相380V电源。
因为本设计中采用中等容量的电动机,所以采用三相380V电源。
整流电路:整流部分将交流电变为脉动的直流电,必须加以滤波。
在本设计中采用三相不可控整流。
它可以使电网的功率因数接近1。
滤波电路:因在本设计中采用电压型变频器,所以采用电容滤波,中间的电容除了起滤波作用外,还在整流电路与逆变电路间起到去耦作用,消除干扰。
逆变电路:逆变部分将直流电逆变成我们需要的交流电。
在设计中采用三相桥逆变,开关器件选用全控型开关管IGBT。
电流电压检测:一般在中间直流端采集信号,作为过压,欠压,过流保护信号。
控制电路:采用8051单片机和SPWM波生成芯片SA4828,控制电路的主要功能是接受各种设定信息和指令,根据这些指令和设定信息形成驱动逆变器工作的信号。
这些信号经过光电隔离后去驱动开关管的关断。
1.4.2 变频器主电路方案的选定变频器最早的形式是用旋转发电机组作为可变频率电源,供给交流电动机。
随着电力半导体器件的发展,静止式的变频电源成为了变频器的主要形式。
静止式变频器从变换环节分为两大类:交-直-交变频器和交-交变频器。
1.交-交型变频器:它的功能是把一种频率的交流电直接变换成另一种频率可调电压的交流电(转换前后的相数相同),又称直接式变频器。
由于中间不经过直流环节,不需换流,故效率很高。
因而多用于低速大功率系统中,如回转窑、轧钢机等。
但这种控制方式决定了最高输出频率只能达到电源频率的1/3~1/2,所以不能高速运行。
2.交-直-交型变频器:交-直-交变频器是先把工频交流通过整流器变成直流,然后再直流变换成频率电压可调的交流,又称间接变频器,交-直-交变频器是目前广泛应用的通用变频器。
交流异步电动机变频调速系统设计报告一、引言异步电动机在工业生产中具有广泛的应用,通过变频调速系统可以实现对异步电动机的精确控制,提高生产效率和控制精度。
本文将详细介绍异步电动机变频调速系统设计的原理和过程。
二、系统设计原理异步电动机通过变频器驱动,实现调速功能。
变频器将交流电源转换为直流电源,通过PWM技术将直流电转换为交流电,进而控制电机的转速。
变频器的主要组成部分包括整流器、中间环节直流母线、逆变器和控制电路。
整流器将交流电源转换为直流电源,并通过滤波电路削波,保持直流电的稳定性。
中间环节直流母线存储电能,为逆变器提供稳定的电源。
逆变器将直流电源转换为交流电源,并通过PWM调制技术调整交流电的频率和幅值,从而控制电机的转速。
控制电路通过传感器采集电机的运行状态,并通过对逆变器的控制信号实现控制目标。
三、系统设计步骤1.确定系统需求:根据应用场景和任务要求,确定对异步电动机的调速要求,包括速度范围、控制精度等。
2.选择电机和变频器:根据系统需求,选择适合的异步电动机和变频器,确保其参数和性能满足需求。
3.设计电路连接:根据电机和变频器的技术规格,设计电机与变频器的连线方式和电路连接,确保信号传输畅通。
4.设计控制系统:根据系统需求,设计控制系统包括传感器、控制电路和控制算法等,确保对电机的精确控制。
5.实施系统调试:将设计好的电路和控制系统进行组装和调试,确保系统能够正常工作。
6.测试系统性能:对系统进行性能测试,包括速度响应、负载变化等测试,验证系统的设计目标是否达到。
7.优化系统性能:根据测试结果,对系统进行调整和优化,提高系统的性能和稳定性。
8.编写设计报告:整理系统设计过程、实施步骤和测试结果,撰写设计报告。
四、系统设计考虑因素1.变频器和电机的匹配性:选择变频器时需要考虑其输出能力是否足够满足电机的需求,包括最大输出功率、额定电流等。
2.控制系统的精确性:设计控制系统时需要考虑传感器的精度、控制器的计算性能等因素,确保控制系统能够精确控制电机的转速。
交流异步电机调速系统实验报告引言在电力系统中,电机调速是一个非常重要且复杂的问题。
随着技术的不断发展,异步电机调速系统成为了广泛应用的一种方案。
本实验旨在通过搭建和调试一个交流异步电机调速系统,来研究其调速性能和控制策略。
实验目的1.理解交流异步电机调速系统的工作原理;2.掌握电机调速系统的基本组成和实验搭建方法;3.研究不同控制策略对电机调速性能的影响;4.分析实验结果,评价不同控制策略的优劣。
实验原理1.异步电机工作原理:异步电机由主电路和励磁电路组成。
主电路中的三相对称电压产生一个旋转磁场,而励磁电路中的电压和电流则产生感应转子电动势和转矩,使得电机运转起来。
2.异步电机调速原理:异步电机调速主要通过控制转子电阻、定子电压以及改变电机的励磁电流来实现。
常见的调速方法有直接转矩控制(DTC)、矢量控制(VC)等。
实验设备和步骤1.实验设备:–交流异步电动机–实验控制器–电压调节器–电流测量仪–速度测量仪–控制软件2.实验步骤:1.搭建电机调速系统的硬件连接,确保各设备按照要求连接并接通电源。
2.在控制软件中选择合适的控制策略,并设置调速参数。
3.运行实验控制器,观察电机的调速性能,并记录实验数据。
4.根据实验数据分析电机的调速性能,并评价不同控制策略的优劣。
实验结果分析根据实验数据,我们可以得出以下结论:1.不同控制策略对电机调速性能的影响:–直接转矩控制(DTC)可以实现较好的转矩和速度响应,但对转子电阻参数变化较为敏感。
–矢量控制(VC)具有较好的转矩和速度响应特性,并且对转子电阻参数变化不敏感。
2.不同电机负载对调速系统的影响:–在轻载情况下,不同控制策略的性能相对较为接近。
–在重载情况下,矢量控制(VC)表现出较好的调速稳定性和承载能力。
结论本实验通过搭建和调试交流异步电机调速系统,研究了不同控制策略对电机调速性能的影响,并分析了不同负载下的调速系统性能。
通过实验结果,我们得出了以下结论:1.矢量控制(VC)相比直接转矩控制(DTC)具有更好的转矩和速度响应特性,且对转子电阻参数变化不敏感。
交流异步电动机变压变频调速系统设计与仿真异步电动机变压变频调速系统是一种常见的电动机调速系统,可以实现电动机转速的精确控制和调节。
本文将介绍异步电动机变压变频调速系统的设计和仿真。
首先,异步电动机的调速原理简要介绍。
异步电动机是一种常用的交流电动机,其转速通常由额定电压和频率决定。
通过改变电动机的电压和频率,可以实现对电动机的调速。
变压变频调速系统通过调节电压和频率的大小,改变电动机的转速。
在设计异步电动机变压变频调速系统之前,首先要确定电动机的参数。
电动机的参数包括额定功率、额定电压、额定电流等,这些参数可以从电动机的标牌上获取。
另外,还需要确定变压变频器的参数,包括额定电压范围、频率范围等。
这些参数将决定整个系统的性能。
设计异步电动机变压变频调速系统的关键是选取合适的变压变频器。
变压变频器是将电网的交流电转换为可调频率和可调电压的交流电的装置。
根据电动机的额定电压和变压变频器的额定电压范围,选取合适的变压变频器,以满足调速系统的要求。
设计异步电动机变压变频调速系统的下一步是进行系统的电路设计。
电路设计包括电动机的接线和变压变频器的接线。
电动机的接线要根据电动机的型号和相数来进行,确保电机的正常运行。
变压变频器的接线要根据变压变频器的接线图进行,确保变压变频器与电动机的连接正确。
完成电路设计后,还需要进行系统的控制设计。
控制设计包括电机的启动和停止控制、电机的转速控制等。
启动和停止控制一般采用按钮控制或者遥控控制,可以通过按钮或者遥控装置来启动和停止电动机。
转速控制一般采用PID控制器进行,通过调节变压变频器的输出电压和频率,来实现对电动机转速的控制和调节。
完成设计后,可以使用仿真软件进行系统的仿真。
常用的仿真软件有MATLAB/Simulink、PSIM等。
通过仿真可以验证系统的设计是否正确,并进行性能评估。
仿真结果可以用来优化系统的设计,提高系统的性能。
综上所述,异步电动机变压变频调速系统的设计和仿真是一个系统工程,需要从确定电动机和变压变频器的参数开始,进行电路设计和控制设计,最后进行仿真验证。

交流异步电机调速系统实验报告一、实验目的本次实验的主要目的是掌握交流异步电机调速系统的工作原理和相关知识,了解电机调速系统中各个部件的作用及其相互关系,并通过实验验证电机调速系统的性能指标。
二、实验原理1. 交流异步电机调速系统的基本构成交流异步电机调速系统由三个部分组成:电源、控制器和驱动器。
其中,电源为整个系统提供稳定的直流或交流电源;控制器负责控制驱动器输出信号,从而控制电机转速;驱动器则将控制信号转换为适合于驱动电机运行的功率信号。
2. 交流异步电机调速系统的工作原理交流异步电机通过变化磁场来产生转矩,在正常运行时,其转矩与转速成正比。
因此,通过改变输入到电机绕组中的频率和幅值可以改变其输出功率。
在实际应用中,可以采用不同类型的控制器来实现不同方式的调速,如开环调速、闭环调速等。
3. 实验所需设备及材料本次实验所需设备及材料包括:一台交流异步电机、一个变频器、一台示波器、一台数字万用表、一套实验线缆和电源线等。
三、实验步骤1. 搭建交流异步电机调速系统首先,将交流异步电机与变频器连接起来,然后将变频器与控制器相连。
最后,将控制器与示波器和数字万用表相连。
2. 测试电机转速接下来,通过调整变频器的输出频率和幅值,逐渐增加电机的转速,并记录下不同转速时的输出功率和效率等参数。
同时,在调整过程中需要注意保持系统稳定,并避免因过载等原因造成设备损坏。
3. 分析实验结果最后,根据实验结果对交流异步电机调速系统的性能进行分析,并对其应用领域及优化方向进行探讨。
四、实验结果分析通过本次实验,我们可以得到以下结论:1. 交流异步电机调速系统具有较好的稳定性和可靠性,在不同负载条件下均能保持较为稳定的输出功率和效率。
2. 调节变频器输出频率和幅值可以有效地改变电机转速,并且在一定范围内可以保证较高的效率。
3. 在实际应用中,可以根据不同的工作条件和要求选择适合的调速方式和控制器类型,以达到最优的性能指标。
交流异步电动机变频调速系统设计报告一、引言随着现代工业技术的快速发展,变频调速技术得到了广泛应用。
异步电动机作为一种常用的驱动设备,其效率和可靠性对工业生产的效率和质量有着直接的影响。
本报告将介绍异步电动机变频调速系统的设计原理、硬件和软件设计以及测试结果。
二、设计原理1.变频调速原理变频调速系统是通过改变电机供电频率来实现转速调节的方法。
通过变频器将电网的交流电转换成可变频率的交流电,从而控制电机的转速。
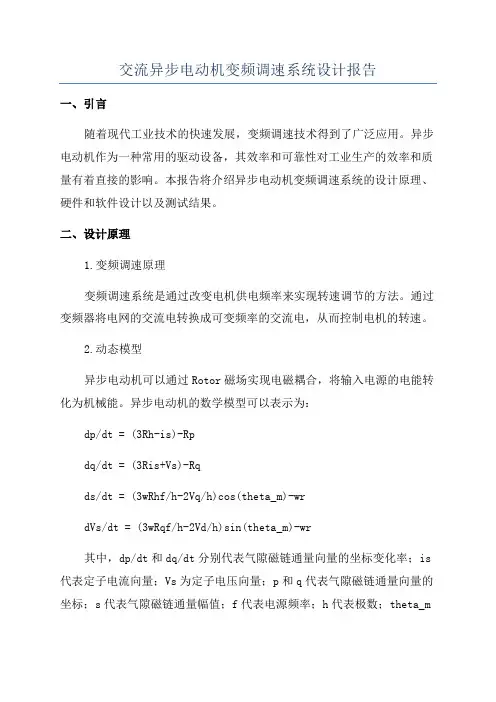
2.动态模型异步电动机可以通过Rotor磁场实现电磁耦合,将输入电源的电能转化为机械能。
异步电动机的数学模型可以表示为:dp/dt = (3Rh-is)-Rpdq/dt = (3Ris+Vs)-Rqds/dt = (3wRhf/h-2Vq/h)cos(theta_m)-wrdVs/dt = (3wRqf/h-2Vd/h)sin(theta_m)-wr其中,dp/dt和dq/dt分别代表气隙磁链通量向量的坐标变化率;is 代表定子电流向量;Vs为定子电压向量;p和q代表气隙磁链通量向量的坐标;s代表气隙磁链通量幅值;f代表电源频率;h代表极数;theta_m代表转子与气隙磁链之间的角度差;w代表角速度;Rp和Rq代表定子参数;Rh代表转子参数;wr代表机械转速。
3.变频器控制策略变频器控制策略包括开环控制和闭环控制。
开环控制是通过设定电机转速来控制变频器输出频率;闭环控制是通过测量电机转速反馈信号,与设定值比较后控制变频器输出频率。
闭环控制能够提高系统的稳定性和响应速度。
三、硬件设计1.变频器选择根据电机的额定功率和电源特性,选择适合的变频器。
常见的变频器有电压型变频器和矢量控制型变频器,根据实际应用需求进行选型。
2.控制电路设计设计包括电源模块、信号处理模块和控制逻辑模块。
电源模块用于将电网交流电转换为适合驱动异步电动机的交流电;信号处理模块用于处理输入信号,包括测量电机转速和控制信号;控制逻辑模块根据控制策略生成控制信号,并将其传递给变频器。
异步电动机的变频调速实验报告英文回答:Introduction.Variable frequency drives (VFDs) are used to control the speed of induction motors. This is done by varying the frequency of the power supplied to the motor. The speed of the motor is directly proportional to the frequency of the power supply.Experimental Setup.The experimental setup consisted of a 1 hp induction motor, a VFD, and a tachometer. The motor was connected to the VFD and the tachometer was used to measure the motor's speed.Procedure.The following procedure was used to conduct the experiment:1. The VFD was set to a frequency of 60 Hz.2. The motor was started and the speed was measured.3. The frequency of the VFD was increased to 70 Hz.4. The speed of the motor was measured.5. The frequency of the VFD was increased to 80 Hz.6. The speed of the motor was measured.Results.The following results were obtained from the experiment:At a frequency of 60 Hz, the motor's speed was 1800 rpm.At a frequency of 70 Hz, the motor's speed was 2100 rpm.At a frequency of 80 Hz, the motor's speed was 2400 rpm.Conclusion.The results of the experiment show that the speed of an induction motor can be controlled by varying the frequency of the power supplied to the motor. This can be useful in a variety of applications, such as conveyor belts, pumps, and fans.中文回答:简介。

、.~①我们‖打〈败〉了敌人。
②我们‖〔把敌人〕打〈败〉了。
转速开环变频调速系统仿真摘要交流异步电动机因为结构简单,体积小,重量较轻,价格便宜,维护方便等特点,在生产和生活中得到广泛的应用,与其他电机相比,交流异步电机的市场占有率始终居第一位。
然而,长期以来,交流异步电动机的调速始终是一个不好解决的问题。
直到二十世纪七十年代,由于计算机的产生,以及近二十年来新型快速的电力电子元件的产生,才使得交流异步电动机得调速成为可能,并得到迅速得普及。
目前,交流异步电动机得调速系统已经广泛应用于数控机床,风机,泵类,传送带,给料系统,空调器等设备得电力源和动力源,并起到了节省电能,提高设备自动化,提高产品质量和质量的良好效果。
现在流行的异步电动机的调速方法可分为两种:变频调速和变压调速,其中异步电动机的变频调速应用较多,它的调速方法可分为两种:变频变压调速和矢量控制法,前者的控制方法相对简单,有二十多年的发展经验。
因此应用的比较多,目前市场上出售的变频器多数都是采用这种控制方法。
关键词:异步电动机;Matlab;变频变压;ABSTRACTIt is simple because of the structure to exchange the asynchronous electrical machinery , the volume is small, weight is light, The price is cheap ,it is convenient to be safeguarded and wait for the characteristic, used widely in the production and life .Compared with other electrical machineries ,the occupation rate of market of exchanging the asynchronous electrical machinery occupies the first place throughout. However ,for a long time, the speed of adjusting of exchanging the asynchronous electrical machinery is a problem not easy to solve throughout .Until the seventies of the 20the century, because of the production of the computer ,and the production of the new-type and fast electronic element of the electric power in the past 20 years, Make and exchange to adjust quick to perhaps, and receive fast popularization asynchronous motors just. At present, exchanging the asynchronous motors and adjust the speed and was used in the numerical control lathe extensively systematically ,Air blower, the type of pump, conveying belt, Unless give material system ,it wait for air conditioners equipment, electric power source or sport source, And get up and save the electric energy , improve the automation of the equipment, improve the good results of the product quality and quality. The asynchronous motors prevailing now is adjusted and controls the method and divide into two kinds rapidly , Variable voltage variable frequence and adjusts speed and vector to control the law. The former is relatively simple when controlling the method, have development experience for more than 20 years ,there are many ones that so used . Most converters selling on the market at present all adopt this kind of control method.Keywords: A synchronous motor ,Matlab ,Variable voltage variable frequence目录摘要 (I)ABSTRACT (II)目录 (III)前言 (4)1 绪论 (5)1.1 交流电机调速概论 (5)1.2 交流调速技术的发展历史 (5)1.3 交流调速技术的发展现状和趋势 (6)1.4 本章小结 (8)2异步电动机变频调速系统 (9)2.1变频调速概述 (9)2.2 静止式变频装置 (10)2.3 正弦波脉宽调制(SPWM)逆变器 (12)2.4 异步电动机的恒压恒频调速原理分析 (14)2.5 本章小结 (16)3交流调压调频调速系统的设计仿真 (18)3.1仿真对象及参数设定 (18)3.2仿真波形及其分析 (21)3.3本章小结 (24)结论 (25)参考文献 (26)致谢 (1)前言目前,交流调速已进入逐步替代直流调速的时代。
三相异步电机转速开环变压变频调速实验总结下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!三相异步电机转速开环变压变频调速实验总结1. 引言在电机调速领域,开环变压变频调速技术是一种常用且有效的方法。
开环调速系统实验报告1. 实验目的本实验的目的是研究开环调速系统的原理和特点,通过实验验证开环调速系统的性能,并掌握调速系统的参数调整方法。
2. 实验原理开环调速系统是指通过控制输入信号的大小和频率,以实现对输出转速的控制。
系统的输入信号经过电机和传动装置,最终驱动负载转动。
开环调速系统的特点是简单、稳定,但对外部负载变化敏感,无法自动调节。
实验所采用的开环调速系统由电机、传动装置、转速传感器和控制器组成。
电机驱动传动装置转动,通过转速传感器获取转速信号,然后通过控制器调节输入信号的大小和频率,最终控制电机的转速。
3. 实验设备和材料- 直流电机- 传动装置- 转速传感器- 控制器- 示波器- 电源- 电阻、电容等元器件4. 实验步骤1. 搭建开环调速系统实验装置,将直流电机与传动装置连接起来。
2. 根据实验所采用的控制器,进行参数设置。
3. 将示波器接入系统,观察电机转速信号和输入信号的变化。
4. 调整输入信号的大小和频率,观察电机转速的变化。
5. 记录实验数据并进行分析。
5. 实验结果经过实验观察和数据记录,得出如下结果:- 输入信号的大小和频率对电机转速有直接影响。
- 在特定的输入信号条件下,电机转速可以稳定在一定范围内。
- 外部负载的变化会影响电机转速的稳定性。
6. 实验讨论根据实验结果,我们可以得出一些结论:- 开环调速系统对外部负载变化敏感,无法自动调节。
- 调整输入信号的大小和频率,可以实现对电机转速的控制,但需要根据具体情况进行参数调整。
7. 总结与展望通过本次实验,我们深入了解了开环调速系统的原理和特点,并通过实验验证了其性能。
在今后的学习和研究中,我们可以进一步探索调速系统的优化和改进方法,提升系统的稳定性和可靠性。
8. 参考文献[1] 张三, 李四. 开环调速系统原理与应用. 电子科技大学出版社, 2000.附录:实验数据记录输入信号大小输入信号频率电机转速10 V 100 Hz 1500 r/min12 V 120 Hz 1800 r/min8 V 80 Hz 1200 r/min备注:实验数据仅供参考,具体数值会因实验条件和设备差异而有所不同。
武汉理工大学华夏学院信息工程课程设计报告书课程名称课程设计总评成绩学生姓名、学号学生专业班级指导教师姓名课程设计起止日期课程设计基本要求课程设计是工科学生十分重要的实践教学环节,通过课程设计,培养学生综合运用先修课程的理论知识和专业技能,解决工程领域某一方面实际问题的能力。
课程设计报告是科学论文写作的基础,不仅可以培养和训练学生的逻辑归纳能力、综合分析能力和文字表达能力,也是规范课程设计教学要求、反映课程设计教学水平的重要依据。
为了加强课程设计教学管理,提高课程设计教学质量,特拟定如下基本要求。
1. 课程设计教学一般可分为设计项目的选题、项目设计方案论证、项目设计结果分析、答辩等4个环节,每个环节都应有一定的考核要求和考核成绩。
2. 课程设计项目的选题要符合本课程设计教学大纲的要求,该项目应能突出学生实践能力、设计能力和创新能力的培养;该项目有一定的实用性,且学生通过努力在规定的时间内是可以完成的。
课程设计项目名称、目的及技术要求记录于课程设计报告书一、二项中,课程设计项目的选题考核成绩占10%左右。
3. 项目设计方案论证主要包括可行性设计方案论证、从可行性方案中确定最佳方案,实施最佳方案的软件程序、硬件电路原理图和PCB图。
项目设计方案论证内容记录于课程设计报告书第三项中,项目设计方案论证主要考核设计方案的正确性、可行性和创新性,考核成绩占30%左右。
4. 项目设计结果分析主要包括项目设计与制作结果的工艺水平,项目测试性能指标的正确性和完整性,项目测试中出现故障或错误原因的分析和处理方法。
项目设计结果分析记录于课程设计报告书第四项中,考核成绩占25%左右。
5. 学生在课程设计过程中应认真阅读与本课程设计项目相关的文献,培养自己的阅读兴趣和习惯,借以启发自己的思维,提高综合分和理解能力。
文献阅读摘要记录于课程设计报告书第五项中,考核成绩占10%左右。
6. 答辩是课程设计中十分重要的环节,由课程设计指导教师向答辩学生提出2~3个问题,通过答辩可进一步了解学生对课程设计中理论知识和实际技能掌握的程度,以及对问题的理解、分析和判断能力。
实验四基于SVPWM及SPWM的交流变频调速系统一、实验目的1.加深理解异步电动机变压变频调速的基本工作原理。
2.熟悉PWM变频器主回路结构和异步电动机转速开环变压变频调速系统的基本结构。
3.异步电动机转速开环变压变频调速系统机械特性。
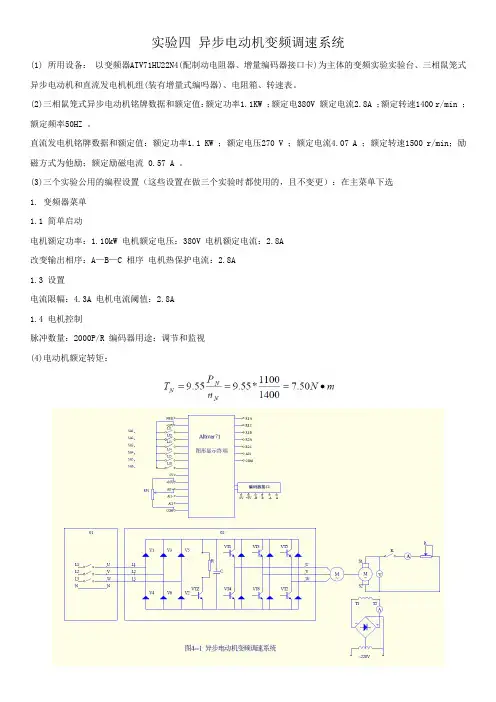
二、实验系统组成及工作原理异步电动机变压变频调速实验系统如图4-1所示,主回路由不可控整流桥、直流滤波环节、全控型电力电子器件IGBT或POWER-MOSFET构成的逆变桥组成,M为三相异步电动机,G为负载直流发电机。
控制器包括驱动电路、微机数字控制器、控制键盘和运行显示等几部分。
~实验图4-1 异步电动机转速开环变压变频调速系统三、实验设备及仪器1. NMCL-32主控制2.三相异步电动机-负载直流发电机组3. NMCL-13A挂箱4.双踪示波器5.万用表,电压表,电流表四、实验内容1.用SPWM变频器给三相异步电动机供电,实现变频调速运行。
2.观测在不同频率和不同负载下的输出电流波形,测试开环机械特性。
3.改变V/f曲线,观察变频器在不同低频补偿条件下的低速运行情况。
4.改变加速时间,观察加速过程。
五、实验步骤及方法1. 实验系统的连接按实验图4-1连接系统,合上控制电源开关,电源指示灯亮,表示微机系统处于等待接受指令状态,按“运行”或“停止”按钮可启动或停止调速系统的运行。
2. 变频调速将负载直流发电机输出电路断开,按“运行”按钮使调速系统进入运行状态,通过给定电位器或键盘改给定频率,记录不同频率下三相异步电动机的空载转速和空载定子电流,并3.测试开环机械特性 (1) 基频开环机械特性测试接通负载直流发电机输出电路,并将负载电阻调到最大,按“运行”按钮使变频器进入运行,将频率给定设定为50Hz ,逐步减小负载电阻,记录异步电动机的转速、定子电流和负载直流发电机的输出电压和电流。
实验过程中应使定子电流小于1.2倍的额定电流,如调速系统不能带载启动,可先断开负载直流发电机励磁,待启动后再接通励磁。
实验四基于SVPWM及SPWM的交流变频调速系统
一、实验目的
1.加深理解异步电动机变压变频调速的基本工作原理。
2.熟悉PWM变频器主回路结构和异步电动机转速开环变压变频调速系统的基本结构。
3.异步电动机转速开环变压变频调速系统机械特性。
二、实验系统组成及工作原理
异步电动机变压变频调速实验系统如图4-1所示,主回路由不可控整流桥、直流滤波环节、全控型电力电子器件IGBT或POWER-MOSFET构成的逆变桥组成,M为三相异步电动机,G为负载直流发电机。
控制器包括驱动电路、微机数字控制器、控制键盘和运行显示等几部分。
~
实验图4-1 异步电动机转速开环变压变频调速系统
三、实验设备及仪器
1. NMCL-32主控制
2.三相异步电动机-负载直流发电机组
3. NMCL-13A挂箱
4.双踪示波器
5.万用表,电压表,电流表
四、实验内容
1.用SPWM变频器给三相异步电动机供电,实现变频调速运行。
2.观测在不同频率和不同负载下的输出电流波形,测试开环机械特性。
3.改变V/f曲线,观察变频器在不同低频补偿条件下的低速运行情况。
4.改变加速时间,观察加速过程。
五、实验步骤及方法
1. 实验系统的连接
按实验图4-1连接系统,合上控制电源开关,电源指示灯亮,表示微机系统处于等待接受指令状态,按“运行”或“停止”按钮可启动或停止调速系统的运行。
2. 变频调速
将负载直流发电机输出电路断开,按“运行”按钮使调速系统进入运行状态,通过给定电位器或键盘改给定频率,记录不同频率下三相异步电动机的空载转速和空载定子电流,并
3.测试开环机械特性 (1) 基频开环机械特性测试
接通负载直流发电机输出电路,并将负载电阻调到最大,按“运行”按钮使变频器进入运行,将频率给定设定为50Hz ,逐步减小负载电阻,记录异步电动机的转速、定子电流和负载直流发电机的输出电压和电流。
实验过程中应使定子电流小于1.2倍的额定电流,如调速系统不能带载启动,可先断开负载直流发电机励磁,待启动后再接通励磁。
(2) 基频以下和基频以上开环机械特性测试
在基频以下和基频以上各选择一个频率作为给定,重复上述实验。
(3) 机械特性)(e T f n =的绘制
由于一般的实验装置不带有负载转矩检测仪,故采用间接方法计算电磁转矩,以便绘制机械特性。
忽略机组的摩擦损耗和负载直流发电机的铜耗,异步电动机的输出功率约等于负载直流发电机的输出功率,即d d I V P ≈2,则电磁转矩n
I V T d
d e π260≈。
4. 在不同低频补偿下的低速运行情况
选择一个较低的给定频率(2Hz或5Hz),测试不加低频补偿的机械特性,再加上低频补偿,测试加低频补偿后的机械特性,比较两者的差异。
5. 异步电动机的变频起动和加速过程
改变加速时间,用慢扫描示波器或存储示波器观察不同参数设置下,电动机的起动和加速过程。
六、实验注意事项
1.观察、记录各处波形时,要注意观察点的参考地(地线)选择,注意微机系统的数字地和变频器主电路的功率地之间的区别。
2.如出现过流保护,一般按“复位”键后,再按“运行”键,可让系统继续运行。
如果运行时又立即出现过流故障,则应关机检查原因。
在低频补偿与加速时间配合不当时,也会出现过流现象。
出现严重故障时,应先按“复位”键,恢复缺省状态,再断开功率电源,以确保故障不扩大。
3. 为了观测系统的过载能力,可使异步电动机的电流达到1.2或1.5倍的额定电流,具体的数值应实验装置而异。
做过载能力测试的实验时,动作应快些,以免变频器长期工作在过流状态。
4.注意控制电源和功率电源的开关顺序:开机时,应先合上控制电源,后合功率电源;停机时,应先断开功率电源,后断控制电源。
七、思考题
1.加载后,转速为什么会下降?分析转速下降的原因。
2.PWM的开关频率很高,一般为几千赫兹,而电流频率却不高,等于给定频率,这时什么原因?
3.加低频补偿的机械特性与不加低频补偿的机械特性有何差异,为什么?
4.低频补偿与加速时间对异步电动机的起动有何影响?低频补偿是不是越大越好?。