具有纯滞后一阶惯性系统的计算机控制系统设计
- 格式:pdf
- 大小:1.50 MB
- 文档页数:34
目录第一部分设计任务及方案1、设计题目及要求2、设计方案分析论证第二部分方案各模块分析1、被控对象分析2、测量元件热电阻及前置放大电路3、A/D转换器4、控制器(单片机)5、光隔驱动器第三部分数字控制器D(Z)的设计1、数字控制器D(Z)2、程序流程图设计第四部分可靠性和抗干扰性的分析第五部分心得体会一、 设计任务及方案1.1 设计题目及要求1、针对一个具有大纯时延时间的一阶惯性环节(()/(1)s G s Ke Ts θ-=+)温度控制系统和给定的系统性能指标(工程要求相角裕度为30~60,幅值裕度>6dB);要求测量范围-50℃~200℃,测量精度0.5%,分辨率0.2℃;2、书面设计一个计算机控制系统的硬件布线连接图,并转化为系统结构图;3、选择一种控制算法并借助软件工程知识编写程序流程图;4、用MA TLAB 和SIMULINK 进行仿真分析和验证; 对象确定:K=10*log(C*C-sqrt(C)),rand(‘state ’,C), T=rand(1),考虑θ=0或T/2两种情况。
C 为学号的后3位数,如C=325,K=115.7,T=0.9824,θ=0或0.4912。
5、进行可靠性和抗干扰性的分析。
1.2 设计方案分析论证从设计要求分析,我们设计一个基于单片机的温度自动控制系统即可达到设计要求。
整个系统以单片机(控制器)为核心,选用光隔驱动器驱动电热丝加热,由热电阻PT100检测然后经过前置放大电路输入A/D 转换器,控制器。
以此构成闭环控制系统,温度能根据设定值自动调节。
图1 方案总体框图二、方案各模块分析2.1 被控对象分析大纯时延时间的一阶惯性环节(()/(1)s G s Ke Ts θ-=+)对象确定:K=10*log(C*C-sqrt(C)),rand(‘state ’,C), T=rang(1), 考虑θ=0或T/2两种情况C 为学号的后3位数,如C=325,K=115.7,T=0.9824,θ=0或0.4912现取C=359,由MATLAB 计算得: c=359;K=10*log(c*c-sqrt(c)) rand('state',c); T=rand(1)>> K =117.6650 T =0.0510θ=0或0.0255所以G(s)=1051.07.1170255.0+-s e s 或1051.07.117+s2.2 测量元件(热电阻)电路及前置放大电路2.2.1 测量元件选型测量元件选用热电阻,热电阻温度计是利用金属导体的电阻值随温度变化而变化的特性来进行温度测量的。
《计算机控制技术》课程设计具有纯滞后一阶惯性系统的计算机控制系统设计班级:姓名:学号:指导老师:日期:目录一、设计任务 (1)1.1 题目 (1)1.2内容与要求 (1)二、设计思想与方案 (2)2.1控制策略的选择 (2)2.2 硬件设计思路与方案 (2)2.3 软件设计思路与方案 (3)三、硬件电路设计 (3)3.1温度传感器输出端与ADC的连接 (3)3.2 ADC与单片机8051的连接 (4)3.3 单片机8051与DAC的连接 (4)3.4 整机电路 (5)四、系统框图 (7)五、程序流程图 (8)5.1 主程序流程图 (8)5.2 子程序流程图 (9)六、数字调节器的求解 (11)6.1 基本参数的计算 (11)七、系统的仿真与分析 (13)7.1 θ=0时系统的仿真与分析 (13)7.2 θ=0时系统的可靠性与抗干扰性分析 (14)7.2 θ=0.4461时系统的仿真与分析 (16)7.3 θ=0.4461时系统的可靠性与抗干扰性分析 (17)八、设计总结与心得体会 (20)参考资料 (21)一、 设计任务一、题目设计1. 针对一个具有纯滞后的一阶惯性环节()1sKe G s Ts τ-=+的温度控制系统和给定的系统性能指标:✧ 工程要求相角裕度为30°~60°,幅值裕度>6dB✧ 要求测量范围-50℃~200℃,测量精度0.5%,分辨率0.2℃2. 书面设计一个计算机控制系统的硬件布线连接图,并转化为系统结构图 具体要求:✧ 温度传感器、执行机构的选型✧ 微型计算机的选型(MCS51、A VR 等等)✧ 温度传感器和单片机的接口电路✧ 其它扩展接口电路(主要是输入输出通道)✧ 利用Protel 绘制原理图,制作PCB 电路板(给出PCB 图)3. 软件部分:✧ 选择一种控制算法(最少拍无波纹或Dalin 算法)设计出控制器(被控对象由第4步中的参数确定),给出控制量的迭代算法,并借助软件工程知识编写程序流程图✧ 写出主要的单片机程序4. 用MATLAB 和SIMULINK 进行仿真分析和验证对象确定:K=10*log(C*C-sqrt(C)),rand(‘state ’,C), T=rand(1)考虑θ=0或T/2两种情况,即有延时和延时半个采样周期的情况。
一、实验目的1. 理解大林控制算法的基本原理及其设计过程。
2. 掌握大林控制算法在计算机控制系统中的应用。
3. 通过实验验证大林控制算法在解决纯滞后系统控制问题上的有效性。
二、实验原理大林控制算法(Dahlin Control Algorithm)是一种针对具有纯滞后特性的控制对象而设计的新型控制算法。
该算法的核心思想是将期望的闭环响应设计成一阶惯性加纯延迟形式,然后通过反向设计得到满足这种闭环响应的控制器。
对于具有纯滞后特性的被控对象,其传递函数可以表示为:\[ G(s) = \frac{K}{T_s s + 1} \cdot e^{-\frac{s}{T}} \]其中,\( K \) 为系统增益,\( T_s \) 为采样周期,\( T \) 为纯滞后时间。
大林控制算法要求选择闭环传递函数 \( W(s) \) 时,采用相当于连续一阶惯性环节的 \( W(s) \) 来代替最少拍多项式。
如果对象有纯滞后,则 \( W(s) \) 应包含有同样的纯滞后环节。
带有纯滞后的控制系统闭环传递函数为:\[ W(s) = \frac{K}{T_s s + 1} \cdot e^{-\frac{s}{T}} \]根据大林控制算法,可以设计出满足期望闭环响应的数字控制器 \( D(z) \):\[ D(z) = \frac{K_1 e^{-\frac{1}{T}}}{(1 - e^{-\frac{1}{T_1}}) (1 - e^{-\frac{1}{T_2}})} \cdot \frac{1}{[1 - e^{-\frac{1}{T_1}} (1 - e^{-\frac{1}{T_2}})] (1 - e^{-\frac{1}{T} z^{-1}})} \]其中,\( K_1 \)、\( T_1 \) 和 \( T_2 \) 为大林算法的参数。
三、实验仪器1. MATLAB 6.5软件一套2. 个人PC机一台四、实验步骤1. 启动MATLAB软件,创建一个新的脚本文件。
摘要随着科学技术的迅猛发展,各个领域对温度控制系统的精度、稳定性等要求越来越高,控制系统也千变万化。
电阻炉广泛应用于各行各业,其温度控制通常采用模拟或数字调节仪表进行调节,但存在着某些固有的缺点。
而采用单片机进行炉温控制,可大大地提高控制质量和自动化水平,具有良好的经济效益和推广价值。
本设计以89C51单片机为核心控制器件,以ADC0809作为A/D转换器件,采用闭环直接数字控制算法,通过控制可控硅来控制热电阻,进而控制电炉温度,最终设计了一个满足要求的电阻炉微型计算机温度控制系统。
关键字:电阻炉89C51单片机温度控制A/D转换电阻炉温度控制系统1系统的描述与分析1.1系统的介绍该系统的被控对象为电炉,采用热阻丝加热,利用大功率可控硅控制器控制热阻丝两端所加的电压大小,来改变流经热阻丝的电流,从而改变电炉炉内的温度。
可控硅控制器输入为0~5伏时对应电炉温度0~500℃,温度传感器测量值对应也为0~5伏,对象的特性为带有纯滞后环节的一阶惯性系统,这里惯性时间常数取T1=30秒,滞后时间常数取τ=10秒。
该系统利用单片机可以方便地实现对PID参数的选择与设定,实现工业过程中PID控制。
它采用温度传感器热电偶将检测到的实际炉温进行A/D转换,再送入计算机中,与设定值进行比较,得出偏差。
对此偏差按PID规律进行调整,得出对应的控制量来控制驱动电路,调节电炉的加热功率,从而实现对炉温的控制。
利用单片机实现温度智能控制,能自动完成数据采集、处理、转换、并进行PID控制和键盘终端处理(各参数数值的修正)与显示。
在设计中应该注意,采样周期不能太短,否则会使调节过程过于频繁,这样,不但执行机构不能反应,而且计算机的利用率也大为降低;采样周期不能太长,否则会使干扰无法与时消除,使调节品质下降。
1.2技术指标设计一个基于闭环直接数字控制算法的电阻炉温度控制系统具体化技术指标如下:1.电阻炉温度控制在0~500℃;2. 加热过程中恒温控制,误差为±2℃;3. LED实时显示系统温度,用键盘输入温度,精度为1℃;4. 采用直接数字控制算法,要求误差小,平稳性好;2方案的比较和确定方案一系统采用8031作为系统的微处理器。
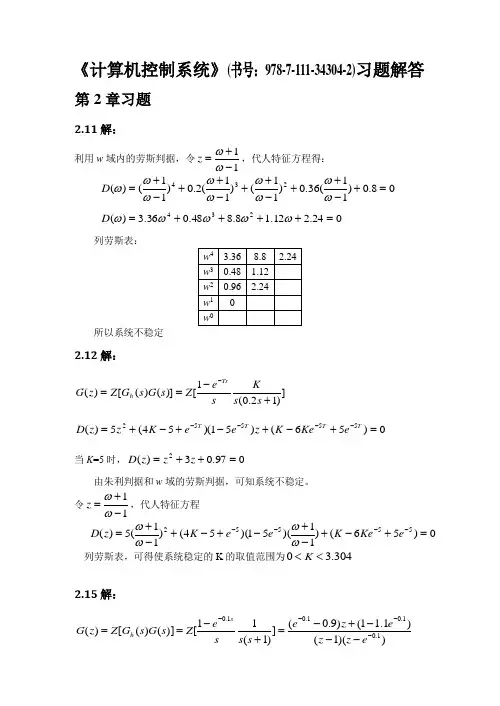
《计算机控制系统》(书号:978-7-111-34304-2)习题解答第2章习题2.11解:利用w 域内的劳斯判据,令11-+=ωωz ,代人特征方程得: 08.0)11(36.0)11()11(2.0)11()(234=+-++-++-++-+=ωωωωωωωωωD024.212.18.848.036.3)(234=++++=ωωωωωD列劳斯表:所以系统不稳定2.12解:])12.0(1[)]()([)(+-==-s s K seZ s G s G Z z G Tsh0)56()51)(54(5)(55552=+-+-+-+=----TTTTeKeK z e eK z z D当K =5时,097.03)(2=++=z z z D由朱利判据和w 域的劳斯判据,可知系统不稳定。
令11-+=ωωz ,代人特征方程0)56()11)(51)(54()11(5)(55552=+-+-+-+-+-+=----eKeK eeK z D ωωωω列劳斯表,可得使系统稳定的K 的取值范围为304.30<<K2.15解:))(1()1.11()9.0(])1(11[)]()([)(1.01.01.01.0-------+-=+-==ez z e z es s seZ s G s G Z z G sh0)()1(lim 1.0)()1(lim )(lim 2111=-==-=∞==→→→z G z K z G z K z G Kz a z v z p1)(==∞vK RT e第4章习题4.1答:为使系统输出无纹波,是以增加调节时间为代价的。
例如对于单位阶跃输入,无纹被系统2拍达到稳态,而有纹波系统一拍就能跟上输入。
4.3答:4.4答:采用惯性因子法后,系统已不可能在有限个采样周期内准确到达稳态,而只能渐近地趋于稳态,但系统对输入类型的敏感程度却因此降低了。
4.5答:大林算法的设计目标为:设计数字控制器使系统的闭环传递函数为具有纯滞后的一阶惯性环节,并使其滞后等于被控对象的滞后,即4.6答:振铃幅度RA (Ringing Amplitude )定义为数字控制器在单位阶跃输入作用下,第0拍输出幅度与第1拍输出幅度之差,即RA =u (0)-u (1)振铃现象的消除:参数选择法:合理T 0和T ,最大程度地抑制振铃。
目录一)课程设计内容任务..................................................................3二)对课设任务的解读 (3)三)系统结构模型框图..................................................................3四)各部分程序流程图 (4)五)数字控制器设计 (5)六)系统仿真..............................................................................6七)抗干扰性分析 (11)八)硬件设计..............................................................................13 九)系统设计硬件元素选型............................................................14 十)心得体会 (16)十一)参考文献…………………………………………………………………16 附硬件设计图一、课程设计内容任务1、针对一个具有大纯时延时间的一阶惯性环节(G(s)=K*e-θs/(Ts+1))温度控制系统和给定的系统性能指标,(工程要求相角裕度为30~60,幅值裕度>6dB);要求测量范围-50℃~200℃,测量精度0。
5%,分辨率0。
2℃;2、书面设计一个计算机控制系统的硬件布线连接图,并转化为系统结构图;3、选择一种控制算法并借助软件工程知识编写程序流程图;4、用MATLAB和SIMULINK进行仿真分析和验证;K=10*log(C*C-sqrt(C)),rand(‘state’,C),T=rand(1), θ=0或T/2,C为学号的后3位数,如:C=325,K=115.7,T=0.9824,θ=0或0。
目录第一部分设计任务及方案1、设计题目及要求2、设计方案分析论证第二部分方案各模块分析1、被控对象分析2、测量元件热电阻及前置放大电路3、A/D转换器4、控制器(单片机)5、光隔驱动器第三部分数字控制器D(Z)的设计1、数字控制器D(Z)2、程序流程图设计第四部分可靠性和抗干扰性的分析第五部分心得体会一、 设计任务及方案1.1 设计题目及要求1、针对一个具有大纯时延时间的一阶惯性环节(()/(1)s G s Ke Ts θ-=+)温度控制系统和给定的系统性能指标(工程要求相角裕度为30~60,幅值裕度>6dB);要求测量范围-50℃~200℃,测量精度0.5%,分辨率0.2℃;2、书面设计一个计算机控制系统的硬件布线连接图,并转化为系统结构图;3、选择一种控制算法并借助软件工程知识编写程序流程图;4、用MA TLAB 和SIMULINK 进行仿真分析和验证; 对象确定:K=10*log(C*C-sqrt(C)),rand(‘state ’,C), T=rand(1),考虑θ=0或T/2两种情况。
C 为学号的后3位数,如C=325,K=115.7,T=0.9824,θ=0或0.4912。
5、进行可靠性和抗干扰性的分析。
1.2 设计方案分析论证从设计要求分析,我们设计一个基于单片机的温度自动控制系统即可达到设计要求。
整个系统以单片机(控制器)为核心,选用光隔驱动器驱动电热丝加热,由热电阻PT100检测然后经过前置放大电路输入A/D 转换器,控制器。
以此构成闭环控制系统,温度能根据设定值自动调节。
图1 方案总体框图二、方案各模块分析2.1 被控对象分析大纯时延时间的一阶惯性环节(()/(1)s G s Ke Ts θ-=+)对象确定:K=10*log(C*C-sqrt(C)),rand(‘state ’,C), T=rang(1), 考虑θ=0或T/2两种情况C 为学号的后3位数,如C=325,K=115.7,T=0.9824,θ=0或0.4912现取C=359,由MATLAB 计算得: c=359;K=10*log(c*c-sqrt(c)) rand('state',c); T=rand(1)>> K =117.6650 T =0.0510θ=0或0.0255所以G(s)=1051.07.1170255.0+-s e s 或1051.07.117+s2.2 测量元件(热电阻)电路及前置放大电路2.2.1 测量元件选型测量元件选用热电阻,热电阻温度计是利用金属导体的电阻值随温度变化而变化的特性来进行温度测量的。
基于西门子工业软件的仿真系统设计-一阶惯性加纯滞后对象摘要本论文针对工业过程中常用的一般典型环节温度、压力、物位和流量等具有一阶惯性加纯滞后特性的连续变量被控对象,通过西门子可编程控制器S7-300对其进行程序设计和仿真,并通过西门子组态软件WinCC对其仿真实验进行界面绘制,来对实际的控制过程进行模拟仿真,从而缩短现场调试周期,提高其工作效率。
关键词:西门子,一阶惯性加纯滞后,仿真The Design of Simulate System Base on Industry Softwares of Siemens—First-order plus time delay inertial objectABSTRACTIn this paper, commonly used for industrial processes typical of the general aspects of temperature, pressure, level and flow with the first-order plus time delay characteristics of the inertia of the continuous variable object, through the siemens S7-300 programmable logic controller to carry out the procedure for its design and simulation, and through siemens simulation WinCC configuration software interface mapping experiments to control the actual process of simulation, so as to shorten the debugging cycle, to improve their work efficiency.KEY WORDS: siemens,first-order plus time delay of inertia,simulation目录摘要 (I)ABSTRACT ................................................................ II 1 绪论. (11.1仿真系统的应用与分类 (11.2本课题研究的目的和意义 (11.3本课题研究的主要任务 (22 PLC介绍及西门子工业软件介绍 (3 2.1 PLC介绍 (32.1.1 PLC的基本概念 (32.1.2 西门子PLC的简介 (32.2 西门子软件介绍 (32.2.1 STEP 7编程软件介绍 (32.2.2 WinCC软件介绍[6] (53 PID控制调节规律 (63.1 PID介绍 (63.1.1 比例调节(P (63.1.2 积分调节(I (63.1.3 微分调节(D (73.1.4 比例积分调节(PI (83.1.5 比例积分微分调节(PID (93.1.6 PID控制器的参数整定 (93.2 连续PID控制器FB41 (103.2.1 介绍 (103.2.2参数表 (113.2.3 连续PID控制器FB41的应用 (144 被控对象的仿真与界面开发 (164.1 程序设计 (164.1.1 一阶惯性加纯滞后数学模型的差分转化 (164.1.2 绘制流程图 (174.1.3 通过STEP 7实现对程序的编写 (174.2 仿真界面的开发 (194.2.1 建立项目 (194.2.2 组态项目 (21IV总结 (26致谢 (27参考文献 (28基于西门子工业软件的仿真系统设计-一阶惯性加纯滞后对象 11 绪论1.1仿真系统的应用与分类系统仿真是20世纪40年代末以来伴随着计算机技术的发展而逐步形成的一门新兴学科。
目录第一部分设计任务及方案1、设计题目及要求2、设计方案分析论证第二部分方案各模块分析1、被控对象分析2、测量元件热电阻及前置放大电路3、A/D转换器4、控制器(单片机)5、光隔驱动器第三部分数字控制器D(Z)的设计1、数字控制器D(Z)2、程序流程图设计第四部分可靠性和抗干扰性的分析第五部分心得体会一、 设计任务及方案1.1 设计题目及要求1、针对一个具有大纯时延时间的一阶惯性环节(()/(1)s G s Ke Ts θ-=+)温度控制系统和给定的系统性能指标(工程要求相角裕度为30~60,幅值裕度>6dB);要求测量范围-50℃~200℃,测量精度0.5%,分辨率0.2℃;2、书面设计一个计算机控制系统的硬件布线连接图,并转化为系统结构图;3、选择一种控制算法并借助软件工程知识编写程序流程图;4、用MA TLAB 和SIMULINK 进行仿真分析和验证; 对象确定:K=10*log(C*C-sqrt(C)),rand(‘state ’,C), T=rand(1),考虑θ=0或T/2两种情况。
C 为学号的后3位数,如C=325,K=115.7,T=0.9824,θ=0或0.4912。
5、进行可靠性和抗干扰性的分析。
1.2 设计方案分析论证从设计要求分析,我们设计一个基于单片机的温度自动控制系统即可达到设计要求。
整个系统以单片机(控制器)为核心,选用光隔驱动器驱动电热丝加热,由热电阻PT100检测然后经过前置放大电路输入A/D 转换器,控制器。
以此构成闭环控制系统,温度能根据设定值自动调节。
图1 方案总体框图二、方案各模块分析2.1 被控对象分析大纯时延时间的一阶惯性环节(()/(1)s G s Ke Ts θ-=+)对象确定:K=10*log(C*C-sqrt(C)),rand(‘state ’,C), T=rang(1), 考虑θ=0或T/2两种情况C 为学号的后3位数,如C=325,K=115.7,T=0.9824,θ=0或0.4912现取C=359,由MATLAB 计算得: c=359;K=10*log(c*c-sqrt(c)) rand('state',c); T=rand(1)>> K =117.6650 T =0.0510θ=0或0.0255所以G(s)=1051.07.1170255.0+-s e s 或1051.07.117+s2.2 测量元件(热电阻)电路及前置放大电路2.2.1 测量元件选型测量元件选用热电阻,热电阻温度计是利用金属导体的电阻值随温度变化而变化的特性来进行温度测量的。
具体内容:1)自己给出系统的闭环传递函数的表达式2)自己设定系统性能指标3)书面设计一个计算机控制系统的硬件布线连接图4)硬件布线连接图转化为系统结构图5)选择一种控制算法6)软件工程知识编写程序流程图7)在MATLAB下进行编程和仿真,给出单位阶跃函数的输出结果表8)进行系统的可靠性和抗干扰性的分析计算机控制系统课程设计目录第一部分设计任务 (1)1.1课程设计任务题目及要求 (1)1.2课程设计任务对象与设计的分析论证 (2)1.2.1控制对象的分析与说明 (2)1.2.2被控对象传递函数的确定 (2)1.2.3系统设计的一般步骤和要点 (3)第二部分设计方案 (4)2.1设计方案分析论证 (4)2.1.1控制对象特性分析 (4)2.1.2算法选择 (6)2.1.3控制器设计 (6)2.2系统方框图 (14)2.2.1控制系统结构示意图 (14)2.2.2硬件结构框图 (14)2.3程序设计流程图 (15)2.3.1主程序流程图 (15)2.3.2温度采集流程图 (16)2.3.3达林算法及其控制量输出流程图 (17)2.4软件实现 (18)第三部分电路设计 (19)3.1器件选型 (19)3.1.1 控制芯片的选择 (19)3.1.3 A/D转换器的选择 (19)3.1.4 D/A转换器的选择 (20)3.2温度检测电路与整形放大滤波电路 (20)3.3 A/D转换电路 (21)3.4 D/A转换电路 (21)3.5数码管显示电路 (22)第四部分整机电路图 (23)第五部分安装调试及性能检测 (24)5.1系统仿真 (24)5.2抗干扰性能分析 (25)5.3元件清单 (27)第六部分心得体会 (28)参考文献 (29)附程序 (30)第一部分 设计任务1.1课程设计任务题目及要求题目:具有纯滞后一阶惯性系统的计算机控制系统设计 要求:1、 针对一个具有纯滞后的一阶惯性环节()1sKe G s Ts τ-=+的温度控制系统和给定的系统性能指标: ✧ 工程要求相角裕度为30°~60°,幅值裕度>6dB✧要求测量范围-50℃~200℃,测量精度0.5%,分辨率0.2℃2、 书面设计一个计算机控制系统的硬件布线连接图,并转化为系统结构图;3、 选择一种控制算法并借助软件工程知识编写程序流程图;4、 用MA TLAB 和SIMULINK 进行仿真分析和验证;对象确定:K=10*log(C*C-sqrt(C)),rand(‘state ’,C),T=rand(1), 考虑θ=0或T/2两种情况。
C 为学号的后3位数,如C=325,K=115.7,T=0.9824,θ=0或0.4912 5、 进行可靠性和抗干扰性的分析。
1.2课程设计任务对象与设计的分析论证 1.2.1控制对象的分析与说明由所给设计任务可知,本设计的控制对象是一个含有具有大时滞的一阶惯性环节()1sKe G s Ts τ-=+的系统,而在通常的温度控制系统中,控制对象往往就可以视作含有一个大纯时延时间的一阶惯性环节的系统,故本次计算机控制系统设计则可以以一个温度控制系统为例设计:加热炉温度控制系统。
目的是保持被加热液体的温度与设定值尽量一致,当系统出现干扰时能够较快地恢复到设定值。
1.2.2被控对象传递函数的确定根据K=10*log(C*C-sqrt(C)),rand(‘state’,C),T=rand(1),θ=0或T/2,C 为学号后3位数的条件,加上本人的学号为201130613317,故可用MA TLAB 计算得:>> C=317C =317>> K=10*log(C*C-sqrt(C)) K =115.1763>> rand('state',C) >> T=rand(1) T =0.8470由要求可得θ=0或0.4235(1) 当无纯时延时,θ=0,被控对象传递函数为:10.8470s 1763.115)(+=s G(2) 当纯时延为T/2(θ=0.4235),被控对象传递函数为:10.8470s 1763e .115)(-0.4235s +=s G针对以上两种情况,需要分别进行分析,以取得预期效果。
1.2.3系统设计的一般步骤和要点待扩充;包括信号流程图第二部分 设计方案2.1设计方案分析论证 2.1.1控制对象特性分析(1)当没有纯时延时,即θ=0时,10.8470s 1763.115)(+=s G用MA TLAB 绘出其波特图: 程序为:num=[115.1763] den=[0.8470 1] g=tf(num,den); margin(g); grid on ;num =115.1763 den =0.8470 1.0000波特图为:由上图可知,系统幅值裕度为无穷(Inf),但相角裕度为90.5deg ,不满足系统要求。
(2)当θ= 0.4235时,有较大纯时延,10.8470s 1763e .115)(-0.4235s+=s G用MA TLAB 绘出其波特图: 程序为:num=[115.1763] den=[0.8470 1]g=tf(num,den,'iodelay', 0.4235); margin(g); grid on ;num =115.1763 den =0.8470 1.0000波特图为:由上图可知,幅值裕度为0.0801dB<6dB,相角裕度为31.1deg ,也不满足题目要求。
故需对对象进行合理控制使其工作符合要求。
综上所述,需对θ=0和θ=0.4235的情况分别进行设计。
2.1.2算法选择● 最小拍无纹波:即最少调整时间系统,在给定某种典型输入(如单位阶跃输入、单位速度输入或单位加速度输入)条件下,通过设计一个控制规律使得闭环系统输出具有最快的响应速度,且输出的采样点之间没有纹波。
在满足系统的快速性、准确性、稳定性和可实现性条件下,设计出来的数字调节器可以实现无静差的稳定状态。
但是最少拍系统存在着局限性:○1对输入信号类型的适应性差;○2对系统参数的变化敏感;○3控制作用易超出允许的控制范围。
● Dalin 算法:在控制系统设计中,纯滞后往往是影响系统动态特性的不利因素,如在热工和化工的许多工业生产过程中,其被控对象模型的不确定性、参数随时间的漂移性和含有较大的纯滞后,如果要求控制系统在最少拍内达到稳态,则不但不能达到预期的效果,反而会引起系统产生大的超调或振荡。
而事实上,对这类系统的控制要求,快速性是次要的,而主要要求系统没有超调或很少的超调。
达林算法就是一种专门针对工业生产过程中含有纯滞后控制对象的直接数字设计算法。
● 对温度控制系统的要求, 主要是保证炉温按规定的温度工艺曲线变化, 超调小或者无超调, 稳定性好, 不振荡, 对系统的快速性要求不高。
而Dalin 算法的设计目标是对带时延的一阶或二阶惯性环节工业对象,设计一个数字调节器,使得整个闭环系统的传递函数为具有纯时延特性的一阶惯性环节,目的是使输出无超调或者超调很小。
结合本次课程设计的控制对象数学模型,若其为不带延时的一阶惯性环节,则选用(1)方案,用最少拍无波纹来设计控制器;若其为带时延的一阶惯性环节,而设计目标就是无超调或者超调很小,故选用(2)方案,用Dalin 算法来实现对系统的控制。
2.1.3控制器设计(1)对于没有纯时延的系统,θ=0,10.8470s 1763.115)(+=s G现采用最少拍无纹波设计方法设计该对象的控制器 D(Z) ,取采样周期为T=0.1T=0.08470s 。
设系统输入为单位阶跃输入1(t),则系统期望闭环传递函数为:H (z )= 1z -G (z )=0[()()]h Z G s G s =0.9048- z 10.96])10.8470s (1763.115[)1(1=+--s Z z用matlab 进行z 变换:>> H=tf([0 115.1763],[0.8470 1])H =115.2 ----------- 0.847 s + 1Continuous-time transfer function.>> Hd=c2d(H,0.08470,'zoh') Hd = 10.96 ---------- z - 0.9048Sample time: 0.0847 seconds Discrete-time transfer function. 数字调节器控制规律D (z )为:D(z)=()()[1()]H z G z H z -= )1(082555.009124.0110.960.9048 - z 11--=-⨯--z z z z 系统开环脉冲传递函数为:()k G z =D (z )G (z )=0.9048 - z 10.96)1(082555.009124.0⨯--z z =111zz--- 因此,对最少拍系统进行开环特性测试,MA TLAB 程序以及运行结果如下:>> Ts=0.1 dnum=[1] dden=[1,-1]Zk=tf(dnum,dden,Ts) margin(Zk) Ts = 0.1000 dnum = 1 dden =1 -1Transfer function:1-----z - 1Sampling time: 0.1由上图可知系统幅值裕度为6.02dB,相角裕度为60deg,符合设计要求。
采用MA TLAB的SIMULINK软件进行仿真,系统框图如下:仿真结果如下:放大后:由上图可以看出,t =1s 时给系统施加了单位阶跃给定输入信号,系统输出在0.1011s 内跟随了输入。
当阶跃出现时,系统能够大约在一个采样周期(0.08470s )后准确地跟随系统输入设定值,达到了性能设计要求。
(2)此时若加入θ= 0.4235的纯时延环节,10.8470s 1763e .115)(-0.4235s+=s G ,设计如下:由于控制对象的纯时延特性常导致控制系统的稳定性降低,过渡过程特性变坏。
有资料指出,当对象的纯延迟时间与对象惯性时间常数m T 之比大于等于0.5时,采用常规PID 算法难以获得良好的系统性能,因此考虑采用达林算法。
带纯时延特性的一阶惯性环节如下:10.8470s1763e .115)(-0.4235s+=s G其中,θ= 0.4235,1τ=0.8470,K=115.1763。
由达林算法,取得系统期望闭环传递函数为:10.848)(0.4235+=-s e s H s式中,τ=0.848 ,大于1τ,则RA ≤0,无振铃现象。