雷达方程原理
- 格式:doc
- 大小:94.50 KB
- 文档页数:3
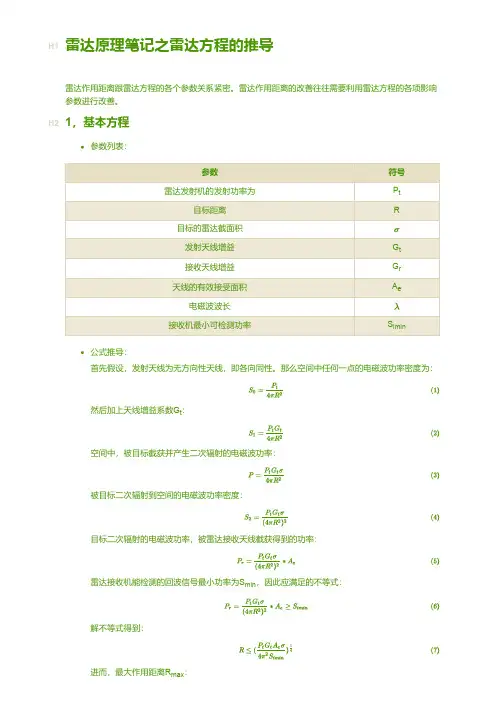
参数符号雷达发射机的发射功率为P t 目标距离R目标的雷达截面积发射天线增益G t 接收天线增益G r 天线的有效接受面积A e 电磁波波长接收机最小可检测功率S imin 雷达原理笔记之雷达方程的推导H1雷达作用距离跟雷达方程的各个参数关系紧密。
雷达作用距离的改善往往需要利用雷达方程的各项影响参数进行改善。
1,基本方程H2参数列表:公式推导:首先假设,发射天线为无方向性天线,即各向同性。
那么空间中任何一点的电磁波功率密度为:然后加上天线增益系数G t :空间中,被目标截获并产生二次辐射的电磁波功率:被目标二次辐射到空间的电磁波功率密度:目标二次辐射的电磁波功率,被雷达接收天线截获得到的功率:雷达接收机能检测的回波信号最小功率为S min ,因此应满足的不等式:解不等式得到:进而,最大作用距离R max :参数符号玻尔兹曼常数k 接收机噪声带宽B n /B s 环境温度(噪声温度)T 0接收机噪声系数F 0检测因子(未相参积累)D 0信号处理增益G sp 损耗衰减因子L 相参积累脉冲个数N脉冲宽度脉冲雷达发射期间的平均功率P t 信号积累有效总时宽T s 对于脉冲体制雷达,常用收发共用天线,则G t =R r ,可得R max 的其他两种形式:2,雷达方程的其他形式H22.1考虑相参积累增益H3将S imin =kT 0B n F 0D 0代入雷达基本方程,得到:s信号处理后:D 0=D 0/G sp ,信号处理后:2.2考虑各种损耗H32.3用信号能量表示的形式H3根据,得到:,式14可化简为:,最终得到能量形式的R max表达式:2.4脉冲体制雷达的雷达方程H33,雷达方程对设计的指导意义H2根据不同情况下对应的雷达方程的具体形式,可以对雷达的设计提供指导性的方案。
1. 提高接收机灵敏度2. 降低损耗3. 增大信号能量4. 降低噪声系数5. 提高天线增益6. …………。
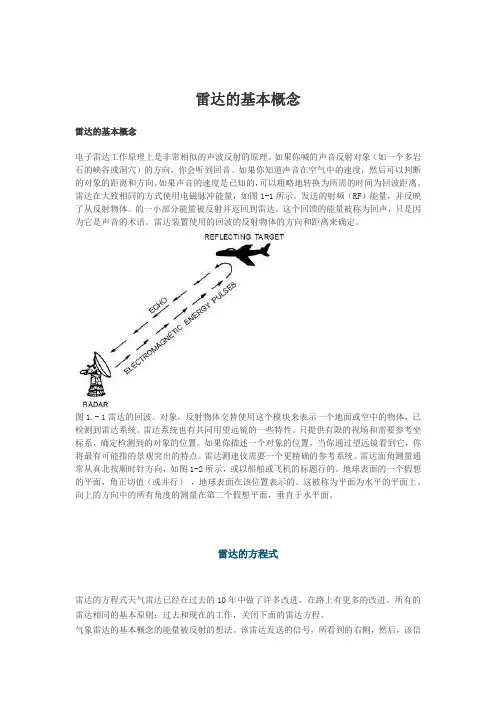
雷达的基本概念雷达的基本概念电子雷达工作原理上是非常相似的声波反射的原理。
如果你喊的声音反射对象(如一个多岩石的峡谷或洞穴)的方向,你会听到回音。
如果你知道声音在空气中的速度,然后可以判断的对象的距离和方向。
如果声音的速度是已知的,可以粗略地转换为所需的时间为回波距离。
雷达在大致相同的方式使用电磁脉冲能量,如图1-1所示。
发送的射频(RF)能量,并反映了从反射物体。
的一小部分能量被反射并返回到雷达。
这个回馈的能量被称为回声,只是因为它是声音的术语。
雷达装置使用的回波的反射物体的方向和距离来确定。
图1.- 1雷达的回波。
对象,反射物体交替使用这个模块来表示一个地面或空中的物体,已检测到雷达系统。
雷达系统也有共同用望远镜的一些特性。
只提供有限的视场和需要参考坐标系,确定检测到的对象的位置。
如果你描述一个对象的位置,当你通过望远镜看到它,你将最有可能指的景观突出的特点。
雷达测速仪需要一个更精确的参考系统。
雷达面角测量通常从真北按顺时针方向,如图1-2所示,或以船舶或飞机的标题行的。
地球表面的一个假想的平面,角正切值(或并行),地球表面在该位置表示的。
这被称为平面为水平的平面上。
向上的方向中的所有角度的测量在第二个假想平面,垂直于水平面。
雷达的方程式雷达的方程式天气雷达已经在过去的10年中做了许多改进。
在路上有更多的改进。
所有的雷达相同的基本原则:过去和现在的工作,关闭下面的雷达方程。
气象雷达的基本概念的能量被反射的想法。
该雷达发送的信号,所看到的右侧,然后,该信号被反射回的雷达。
反射信号越强,颗粒越大。
天气雷达的基本信息,点击这里一个视频从富兰克林学院科学Muesum的。
该方程包含的变量或者是已知的,或直接测量。
只能有一个值,该值丢失,但它可以解决的数学。
下面是变量,它们是什么,以及它们是如何测量的名单。
参数:从目标返回到雷达平均功率。
雷达发送25个脉冲,然后测量在这些返回接收的平均功率。
该雷达采用多脉冲自发电气象目标返回脉冲间不等。
激光雷达方程推导1. 引言激光雷达(Lidar)是一种通过测量激光脉冲的传播时间和反射强度来获取目标物体位置和形状信息的主动光学遥感技术。
在自动驾驶、环境感知、地质勘探等领域有着广泛的应用。
激光雷达方程是描述激光雷达测距原理的数学模型,本文将对激光雷达方程进行推导。
2. 激光雷达工作原理激光雷达发射器发出一个短脉冲的激光束,该束经过大气层并与目标物体相互作用后被接收器接收。
通过测量激光脉冲从发射到接收所需的时间以及反射回来时的强度,可以确定目标物体与激光雷达之间的距离和位置。
3. 推导过程为了推导激光雷达方程,我们需要考虑以下几个因素:•激光束在空气中传播时会发生衰减;•目标物体会反射一部分入射到其表面的激光束;•接收器只能接收到反射激光束的一部分。
3.1 衰减因素激光束在空气中传播时会发生衰减,主要有两个原因:吸收和散射。
我们可以用以下公式表示激光束的衰减:I=I0e−αd其中,I是接收到的激光强度,I0是初始激光强度,α是吸收系数,d是激光传播距离。
3.2 反射因素目标物体会反射一部分入射到其表面的激光束。
我们可以用以下公式表示反射激光强度:I r=ρI其中,I r是反射激光强度,ρ是反射系数。
3.3 接收因素接收器只能接收到反射激光束的一部分。
我们可以用以下公式表示接收到的激光强度:I recv=A⋅I r其中,A是接收器探测效率。
3.4 测距原理根据测距原理,我们可以得到以下公式:d=c⋅t 2其中,d是目标物体与激光雷达之间的距离,c是光速,t是激光脉冲从发射到接收所需的时间。
3.5 激光雷达方程推导将上述公式整合起来,我们可以得到激光雷达方程:I recv=A⋅ρI0e−αd将测距公式代入上式中,可以得到:I recv=A⋅ρI0e−αct 24. 总结本文对激光雷达方程进行了推导。
通过考虑衰减因素、反射因素和接收因素,并结合测距原理,我们得到了描述激光雷达测距原理的数学模型。
这个模型可以帮助我们理解激光雷达的工作原理,并为相关应用提供基础支持。
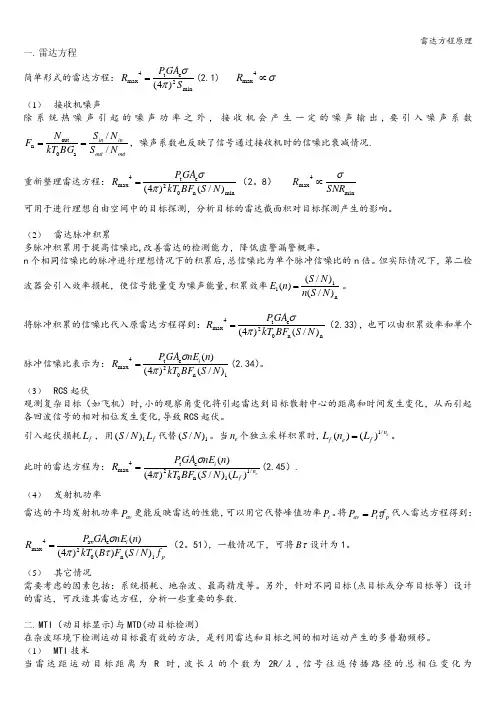
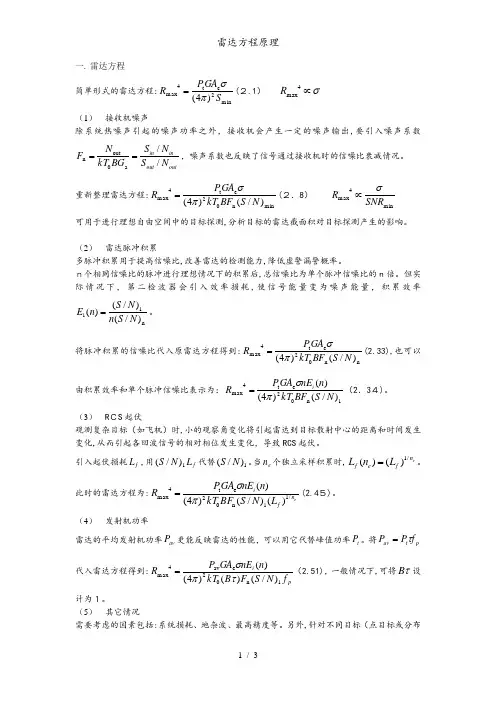
一. 雷达方程 简单形式的雷达方程:min 2e t 4max )4(S GA P R πσ=(2.1) σ∝4max R (1) 接收机噪声 除系统热噪声引起的噪声功率之外,接收机会产生一定的噪声输出,要引入噪声系数outout in in N S N S BG kT N F //a 0out n ==,噪声系数也反映了信号通过接收机时的信噪比衰减情况. 重新整理雷达方程:minn 02e t 4max )/()4(N S BF kT GA P R πσ=(2。
8) min 4max SNR R σ∝ 可用于进行理想自由空间中的目标探测,分析目标的雷达截面积对目标探测产生的影响。
(2) 雷达脉冲积累多脉冲积累用于提高信噪比,改善雷达的检测能力,降低虚警漏警概率。
n 个相同信噪比的脉冲进行理想情况下的积累后,总信噪比为单个脉冲信噪比的n 倍。
但实际情况下,第二检波器会引入效率损耗,使信号能量变为噪声能量,积累效率n1i )/()/()(N S n N S n E =。
将脉冲积累的信噪比代入原雷达方程得到:nn 02e t 4max )/()4(N S BF kT GA P R πσ=(2.33),也可以由积累效率和单个脉冲信噪比表示为:1n 02e t 4max )/()4()(N S BF kT n nE GA P R i πσ=(2.34)。
(3) RCS 起伏 观测复杂目标(如飞机)时,小的观察角变化将引起雷达到目标散射中心的距离和时间发生变化,从而引起各回波信号的相对相位发生变化,导致RCS 起伏。
引入起伏损耗f L ,用f L N S 1)/(代替1)/(N S 。
当e n 个独立采样积累时,e n f e f L n L /1)()(=。
此时的雷达方程为:e n f i L N S BF kT n nE GA P R /11n 02e t 4max )()/()4()(πσ=(2.45). (4) 发射机功率 雷达的平均发射机功率av P 更能反映雷达的性能,可以用它代替峰值功率t P 。
雷达距离方程
雷达距离方程是用来计算距离的重要数学方程式,它的原理是,当向太空某点发射信号时,信号会延迟一定的时间,然后又会发出一个反射波。
通过测量发射信号和反射信号之间的时间差,就可以计算信号放射点到接收点之间的距离,也就是雷达距离。
1. 雷达距离方程的原理
当向太空某点发射信号时,信号会延迟一定的时间,然后又会发出一个反射波。
通过测量发射信号和反射信号之间的时间差,即可计算信号放射点到接收点之间的距离,也就是雷达距离
2. 雷达距离方程的公式
雷达距离的计算公式为:d=c*t/2,其中,d为发射点和接收点之间的距离,c为光速(约299,800Km/s),t为发射信号到反射信号的时间差。
3. 雷达距离方程的应用
雷达距离方程可以广泛应用于太空探测、海上交通管理、定位导航等多个领域,是许多关键应用技术的支撑。
例如,在导航领域,通过测量雷达距离与位置关系,可以更准确的确定目标位置;同样在航海领域,通过测量雷达距离,可以更有效地实施船舶控制和管理。
4. 雷达距离方程的优势
雷达距离方程非常精确,它比其他测量海拔距离方法更准确。
此外,
雷达距离方程不受天气和地形因素的影响,可以在任何条件下进行测量,因此可以用于太空探测、海上交通管理、定位导航等各种领域中。
雷达方程公式雷达是一个常用的电子设备,它能够使用无线电波来探测周围环境中的物体。
雷达技术在军事、航空、天气预报等领域有着广泛的应用。
雷达的核心是雷达方程公式,它是雷达技术的基础,本文将详细介绍雷达方程公式的含义、推导过程和应用。
一、雷达方程公式的含义雷达方程公式是描述雷达探测能力的数学公式,它可以计算雷达的最大探测距离、最小探测目标尺寸等参数。
雷达方程公式的一般形式为:P_r=frac{P_tG_tG_rlambda^2sigma}{(4pi)^3R^4L} 其中,P_r是接收功率,P_t是发射功率,G_t是发射天线增益,G_r是接收天线增益,λ是雷达的工作波长,σ是目标的雷达截面积,R是雷达与目标之间的距离,L是系统的损耗因子。
从公式中可以看出,雷达方程公式包含了雷达探测能力的各种因素,如发射功率、天线增益、波长、目标雷达截面积、距离和系统的损耗因子。
这些因素综合影响着雷达的探测能力。
因此,通过雷达方程公式的计算,可以评估雷达的探测性能,对雷达的设计和使用具有重要意义。
二、雷达方程公式的推导过程雷达方程公式是基于电磁学原理推导出来的。
雷达是通过发射电磁波并接收反射回来的信号来探测目标的,因此,雷达方程公式的推导需要考虑电磁波在空间中的传播和反射。
首先,考虑雷达发射天线向外发射电磁波的情况。
发射天线的功率可以表示为:P_t=frac{E^2}{2Z_0}其中,E是电场强度,Z_0是自由空间的特征阻抗。
根据电磁波的传播原理,电场强度与距离的平方成反比,即:E=frac{E_0}{R}其中,E_0是发射天线上的电场强度,R是雷达与目标之间的距离。
将上式代入发射功率公式中,得到:P_t=frac{E_0^2}{2Z_0R^2}接下来,考虑雷达接收天线接收到的信号功率。
根据电磁波的反射原理,当电磁波照射到目标表面时,会发生反射,反射回来的信号功率可以表示为:P_r=frac{E_r^2}{2Z_0}其中,E_r是接收天线上的电场强度。
雷达原理笔记之雷达方程推导参数符号雷达发射机的发射功率为P t 目标距离R目标的雷达截面积发射天线增益G t 接收天线增益G r 天线的有效接受面积A e 电磁波波长接收机最小可检测功率S imin 雷达原理笔记之雷达方程的推导H1雷达作用距离跟雷达方程的各个参数关系紧密。
雷达作用距离的改善往往需要利用雷达方程的各项影响参数进行改善。
1,基本方程H2参数列表:公式推导:首先假设,发射天线为无方向性天线,即各向同性。
那么空间中任何一点的电磁波功率密度为:然后加上天线增益系数G t :空间中,被目标截获并产生二次辐射的电磁波功率:被目标二次辐射到空间的电磁波功率密度:目标二次辐射的电磁波功率,被雷达接收天线截获得到的功率:雷达接收机能检测的回波信号最小功率为S min ,因此应满足的不等式:解不等式得到:进而,最大作用距离R max :参数符号玻尔兹曼常数k 接收机噪声带宽B n /B s 环境温度(噪声温度)T 0接收机噪声系数F 0检测因子(未相参积累)D 0信号处理增益G sp 损耗衰减因子L 相参积累脉冲个数N脉冲宽度脉冲雷达发射期间的平均功率P t 信号积累有效总时宽T s 对于脉冲体制雷达,常用收发共用天线,则G t =R r ,可得R max 的其他两种形式:2,雷达方程的其他形式H22.1考虑相参积累增益H3将S imin =kT 0B n F 0D 0代入雷达基本方程,得到:s信号处理后:D 0=D 0/G sp ,信号处理后:2.2考虑各种损耗H32.3用信号能量表示的形式H3根据,得到:,式14可化简为:,最终得到能量形式的R max表达式:2.4脉冲体制雷达的雷达方程H33,雷达方程对设计的指导意义H2根据不同情况下对应的雷达方程的具体形式,可以对雷达的设计提供指导性的方案。
1. 提高接收机灵敏度2. 降低损耗3. 增大信号能量4. 降低噪声系数5. 提高天线增益6. …………。
雷达作用距离方程公式
雷达技术是一种广泛应用于现代军事、民用领域的无线电探测和测距技术。
而雷达作用距离方程公式是雷达技术中非常重要的一个数学公式,其作用是计算雷达探测目标距离的数学公式。
雷达作用距离方程公式可以用来计算雷达发射的电磁波向目标物体传播并返回的时间,以此推算出目标物体的距离。
根据雷达技术的原理,雷达发射器发射的电磁波信号会在空气中传播并遇到目标物体后反射回来,这个过程中电磁波信号会经历一段时间的传播和反射,最终返回雷达接收器。
雷达作用距离方程公式就是通过计算电磁波信号传播时间并乘以光速得出目标物体距离的数学公式。
具体来说,雷达作用距离方程公式可以表示为:
R = c × t / 2
其中,R表示目标距离,c表示光速,t表示电磁波从发射到反射返回所需的时间。
由于电磁波在空气中传播速度是光速的一半,因此公式中需要除以2才能得到目标距离。
需要注意的是,雷达作用距离方程公式只能计算出目标物体到雷达发
射器的距离,并不能确定目标物体的具体位置。
在实际应用中,常常需要根据多个雷达探测站的数据进行三角定位来确定目标物体的精确位置。
总之,雷达作用距离方程公式是雷达技术中非常重要的一个数学公式,可以用来计算雷达探测目标距离。
对于雷达技术的了解和应用,掌握这个数学公式非常有帮助。
一. 雷达方程简单形式的雷达方程:min 2e t 4max )4(S GA P R πσ=(2.1) σ∝4max R (1) 接收机噪声除系统热噪声引起的噪声功率之外,接收机会产生一定的噪声输出,要引入噪声系数outout in in N S N S BG kT N F //a 0out n ==,噪声系数也反映了信号通过接收机时的信噪比衰减情况。
重新整理雷达方程:minn 02e t 4max )/()4(N S BF kT GA P R πσ=(2.8) min 4max SNR R σ∝ 可用于进行理想自由空间中的目标探测,分析目标的雷达截面积对目标探测产生的影响。
(2) 雷达脉冲积累多脉冲积累用于提高信噪比,改善雷达的检测能力,降低虚警漏警概率。
n个相同信噪比的脉冲进行理想情况下的积累后,总信噪比为单个脉冲信噪比的n 倍。
但实际情况下,第二检波器会引入效率损耗,使信号能量变为噪声能量,积累效率n1i )/()/()(N S n N S n E =。
将脉冲积累的信噪比代入原雷达方程得到:nn 02e t 4max )/()4(N S BF kT GA P R πσ=(2.33),也可以由积累效率和单个脉冲信噪比表示为:1n 02e t 4max )/()4()(N S BF kT n nE GA P R i πσ=(2.34)。
(3) R CS 起伏观测复杂目标(如飞机)时,小的观察角变化将引起雷达到目标散射中心的距离和时间发生变化,从而引起各回波信号的相对相位发生变化,导致RCS 起伏。
引入起伏损耗f L ,用f L N S 1)/(代替1)/(N S 。
当e n 个独立采样积累时,e n f e f L n L /1)()(=。
此时的雷达方程为:e n f i L N S BF kT n nE GA P R /11n 02e t 4max )()/()4()(πσ=(2.45)。
雷达方程及其推导过程雷达方程是雷达工程中的重要概念,用来描述雷达系统中的回波信号强度与目标之间的关系。
通过雷达方程,可以计算出目标的反射截面积、目标与雷达之间的距离以及目标的速度等重要信息。
雷达方程的推导过程首先从麦克斯韦方程组出发,利用电磁波的传播特性和目标的散射特性,最终得到雷达方程。
下面我们来逐步推导雷达方程。
根据电磁波的传播特性,可以得到电磁波在自由空间中的传播方程:∇²E - με∂²E/∂t² = 0其中,E表示电场强度,μ和ε分别表示自由空间的磁导率和电容率。
这个方程描述了电磁波在自由空间中的传播行为。
接下来,考虑雷达系统中的目标,假设目标是一个小球体,其直径远小于入射波的波长。
目标的散射特性可以用散射截面积σ描述,σ表示目标对电磁波的散射能力。
当电磁波照射到目标上时,一部分能量将被目标散射,形成回波信号。
假设入射波的电场强度为Ei,目标产生的散射场为Es,回波场为Er。
根据叠加原理,总场强可以表示为:E = Ei + Es + Er其中,入射场和散射场可以看作是波源,它们的传播方程可以写为:∇²Ei - με∂²Ei/∂t² = 0∇²Es - με∂²Es/∂t² = 0而回波场是由目标散射场产生的,可以表示为:Er = αEs其中,α为雷达截面积的比例因子。
将上述三个场强代入电磁波的传播方程中,可以得到:∇²E - με∂²E/∂t² = 0将总场强E展开,可以得到:∇²(Ei + Es + Er) - με∂²(Ei + Es + Er)/∂t² = 0进一步展开并整理,可以得到:∇²Es - με∂²Es/∂t² - αμε∂²Es/∂t² = -(∇²Ei + με∂²Ei/∂t²)根据散射场的传播方程,可以得到:∇²Es - με∂²Es/∂t² - αμε∂²Es/∂t² = 0将上述方程进一步化简,可以得到:(1 + α)∇²Es - (1 + α)με∂²Es/∂t² = 0继续化简,可以得到雷达方程:∇²Es - με∂²Es/∂t² = 0其中,Es表示目标产生的散射场,也就是回波场。
雷达方程式
雷达方程式是一个重要的数学工具,它可以表示雷达信号的传播。
雷
达方程式是一个复杂的非线性隐式函数,由若干参数共同组成。
它由速度、角度、频率和时间四个重要参数所决定。
雷达方程式有两部分:直接波方
程和误差波方程。
直接波方程表明当一个(物理的或者电子的)衝擊力作
用在物体上时,其中必须有一部份波能够传遞出去并最后返回回來。
而误
差波方程能够分析不同的衝擊力所产生的不同的误差波,从而帮助我们理
解雷达信号传播过程中所产生的不同影响因素。
通过使用雷达方程式,我们可以对雷达信号进行测量和分析;也可以
对雷达信号传播特征进行测量和分析;此外还能够预测和估计目标物体地
理位置、速度大小、航向和高度。
总之,雷达方程式是一个重要的数学工具,它能够有效地帮助我们对
雷达信号进行测量、分析和预测;也能够帮助我们了解雷达信号传播特征。
雷达方程1. 引言雷达(Radar)是一种利用无线电波进行探测和测距的技术。
在现代科技中,雷达被广泛应用于军事、民航、气象和海洋等领域。
雷达方程(Radar Equation)是描述雷达系统性能的基本方程,它可以用来计算雷达的探测能力和测量结果。
本文将介绍雷达方程的基本原理,并使用Python编写代码来实现雷达方程的计算。
2. 雷达方程的原理雷达方程描述了从发送到接收信号之间的能量传输过程。
它包含了发送功率、接收功率、目标散射截面积以及距离等因素。
2.1 发送功率发送功率是指雷达发射机产生并向天线辐射出去的电磁能量。
通常以瓦特(W)为单位表示。
发送功率越大,雷达系统的探测范围就越远。
2.2 接收功率接收功率是指从目标散射回来并被天线接收到的电磁能量。
通常以瓦特(W)为单位表示。
接收功率受到目标散射截面积、目标与雷达之间的距离以及信号传播损耗等因素的影响。
2.3 目标散射截面积目标散射截面积是指目标对雷达波的散射效果。
它是一个表征目标大小和形状的参数,通常以平方米(m^2)为单位表示。
目标散射截面积越大,目标对雷达的回波信号就越强。
2.4 距离距离是指雷达与目标之间的直线距离。
通常以米(m)为单位表示。
距离越远,接收功率就会受到信号传播损耗的影响而减弱。
3. 雷达方程的公式根据以上原理,雷达方程可以表示为:Pr = Pt * Gt * Gr * (λ^2) * σ / (4 * π * R^4 * L)其中:•Pr 表示接收功率(W)•Pt 表示发送功率(W)•Gt 表示发射天线增益•Gr 表示接收天线增益•λ 表示雷达波长(m)•σ 表示目标散射截面积(m^2)•R 表示距离(m)•L 表示信号传播损耗4. 使用Python实现雷达方程的计算下面是使用Python编写的雷达方程计算代码:import mathdef radar_equation(Pt, Gt, Gr, wavelength, sigma, distance, loss):Pr = Pt * Gt * Gr * (wavelength**2) * sigma / (4 * math.pi * distance**4 *loss)return Pr# 示例数据Pt = 1000 # 发送功率(W)Gt = 1 # 发射天线增益Gr = 1 # 接收天线增益wavelength = 0.1 # 雷达波长(m)sigma = 10 # 目标散射截面积(m^2)distance = 10000 # 距离(m)loss = 1 # 信号传播损耗Pr = radar_equation(Pt, Gt, Gr, wavelength, sigma, distance, loss)print(f"接收功率为:{Pr} W")在以上代码中,我们定义了一个名为radar_equation的函数,用于计算雷达方程。
雷达方程 Python1. 引言雷达(Radar)是一种利用电磁波进行探测和测量的设备。
雷达系统由发射机、接收机、天线和信号处理部分组成,它们共同完成信号的发射、接收和处理过程。
雷达方程是用来描述雷达系统中信号传播过程的数学模型。
本文将介绍雷达方程的基本原理,并使用Python实现一个简单的雷达方程模拟程序。
2. 雷达方程原理雷达方程描述了从雷达发射器发送的电磁波在目标物体上反射后返回到接收器的过程。
该方程可以分为两个部分:发射部分和接收部分。
2.1 发射部分在发射部分,雷达系统通过天线向目标物体发送电磁波。
这些电磁波以一定的功率(通常以瓦特为单位)从天线辐射出去,并在空间中以球面扩散。
2.2 接收部分在接收部分,当电磁波遇到目标物体时,一部分电磁波被反射回来,并由天线接收。
接收到的电磁波经过放大和滤波等处理后,被转换为电压信号。
这个电压信号包含了目标物体的信息。
2.3 雷达方程雷达方程将发射和接收两个部分结合起来,描述了从发射到接收的整个过程。
它可以表示为:Pr = Pt * Gt * Gr * (λ^2 * σ * Ae) / ((4 * π)^3 * R^4)其中,Pr是接收到的功率(以瓦特为单位),Pt是发射功率(以瓦特为单位),Gt是发射天线的增益,Gr是接收天线的增益,λ是波长(以米为单位),σ是目标物体的雷达截面积,Ae是有效接收面积,R是目标物体距离雷达系统的距离。
3. Python实现为了更好地理解和应用雷达方程,我们可以使用Python编写一个简单的雷达方程模拟程序。
以下是一个基本的实现示例:import mathdef radar_equation(Pt, Gt, Gr, wavelength, sigma, Ae, R):numerator = Pt * Gt * Gr * (wavelength**2) * sigma * Aedenominator = (4 * math.pi)**3 * R**4Pr = numerator / denominatorreturn Pr# 设置参数Pt = 1e6 # 发射功率(1兆瓦)Gt = 100 # 发射天线增益Gr = 200 # 接收天线增益wavelength = 0.1 # 波长(10厘米)sigma = 1e-4 # 目标物体雷达截面积(0.0001平方米)Ae = math.pi * (wavelength / 2)**2 # 有效接收面积(圆形天线)R = 1000 # 目标物体距离雷达系统的距离(1000米)# 计算接收功率Pr = radar_equation(Pt, Gt, Gr, wavelength, sigma, Ae, R)# 输出结果print("接收功率:", Pr, "瓦特")在上述代码中,我们定义了一个radar_equation函数来计算雷达方程中的接收功率。
雷达测距原理公式
雷达测距的基本原理,主要通过测定雷达发射电磁波的脉冲在被测目标上反射返回的时间间隔来计算距离。
更详细地讲,雷达设备发射的电磁脉冲会射向目标,然后从目标反射回来。
雷达接收器会接收到这个反射信号,并计算出信号发射到返回的时间差。
因为电磁波在空气中的传播速度是一定的,所以可以通过这个时间差来计算出雷达与目标的准确距离。
雷达测距原理的基本公式可以表述为:D=c*t/2。
在这个公式中,D代表雷达
与目标之间的距离,c代表电磁波在空气中的传播速度,t代表电磁波信号发射后
返回所需的时间。
除以2的原因是因为电磁波需要来回传播,即所需时间包括了电磁波从雷达发射到目标,然后从目标反射返回雷达的总时间。
在实际应用中,由于各种因素(如大气折射、目标的大小和反射特性等)的影响,雷达测距的精度会有所下降。
但是通过使用更复杂的测距方法,如多普勒效应,相位测量等,可以进一步提高测距的精度。
因此,雷达测距原理是复杂的,并非单纯的利用电磁波反射来测距,而是结合了多种因素和技术。
通过深入理解雷达测距原理和公式,可以更好地利用雷达设备,提高测距的精度和效率。
一. 雷达方程 简单形式的雷达方程:min
2e t 4max )4(S GA P R πσ=(2.1)⇨ σ∝4max R (1) 接收机噪声 除系统热噪声引起的噪声功率之外,接收机会产生一定的噪声输出,要引入噪声系数out
out in in N S N S BG kT N F //a 0out n ==,噪声系数也反映了信号通过接收机时的信噪比衰减情况。
重新整理雷达方程:min
n 02e t 4max )/()4(N S BF kT GA P R πσ=(2.8)⇨ min 4max SNR R σ∝ 可用于进行理想自由空间中的目标探测,分析目标的雷达截面积对目标探测产生的影响。
(2) 雷达脉冲积累
多脉冲积累用于提高信噪比,改善雷达的检测能力,降低虚警漏警概率。
n 个相同信噪比的脉冲进行理想情况下的积累后,总信噪比为单个脉冲信噪比的n 倍。
但实际情况下,第二检波器会引入效率损耗,使信号能量变为噪声能量,积累效率n
1i )/()/()(N S n N S n E =。
将脉冲积累的信噪比代入原雷达方程得到:n
n 02e t 4max )/()4(N S BF kT GA P R πσ=(2.33),也可以由积累效率和单个脉冲信噪比表示为:1
n 02e t 4max )/()4()(N S BF kT n nE GA P R i πσ=(2.34)。
(3) RCS 起伏
观测复杂目标(如飞机)时,小的观察角变化将引起雷达到目标散射中心的距离和时间发生变化,从而引起各回波信号的相对相位发生变化,导致RCS 起伏。
引入起伏损耗f L ,用f L N S 1)/(代替1)/(N S 。
当e n 个独立采样积累时,e n f e f L n L /1)()(=。
此时的雷达方程为:e n f i L N S BF kT n nE GA P R /11n 02e t 4max )()/()4()(πσ=
(2.45)。
(4) 发射机功率
雷达的平均发射机功率av P 更能反映雷达的性能,可以用它代替峰值功率t P 。
将p t av f P P τ=代入雷达方程得到:p
i f N S F B kT n nE GA P R 1n 02e av 4max )/()()4()(τπσ=(2.51),一般情况下,可将τB 设计为1。
(5) 其它情况
需要考虑的因素包括:系统损耗、地杂波、最高精度等。
另外,针对不同目标(点目标或分
布目标等)设计的雷达,可改造其雷达方程,分析一些重要的参数。
二. MTI (动目标显示)与MTD (动目标检测)
在杂波环境下检测运动目标最有效的方法,是利用雷达和目标之间的相对运动产生的多普勒频移。
(1) MTI 技术
当雷达距运动目标距离为R 时,波长λ的个数为2R/λ,信号往返传播路径的总相位变化为λπλπφ/422R R
=⨯=。
由d r f v R πλ
πλπφ24dt d 4dt d ===得到多普勒频移d f 。
MTI 滤波器用于滤除杂波干扰,即对消器,是MTI 的核心。
由于固定目标回波的多普勒频率为0,慢速运动的杂波中所含的多普勒频移也集中在零频率附近,所以它们的回波经过相位检波后,输出信号的相位不随时间变化或变化缓慢,所以将同一距离单元在相邻的重复周期内的相检输出做减法运算,固定目标的回波将被完全对消,慢速运动目标的杂波也会得到很大衰减。
增加对消次数也可以增强滤波能力。
常用MTI 滤波器:一次对消器、二次对消器。
(2) MTD 技术
MTD 是相对于传统MTI 技术的一种改进,主要表现在:1.改善滤波器的频率特性,是滤波器更接近区最佳线性滤波,提高改善因子;2.可以检测强地杂波中的低速目标;3.可以抑制气象引起的慢速运动杂波。
MTD 的核心是线性数字MTI 加窄带多普勒滤波器组。
线性MTI 具有大动态范围,窄带多普勒滤波器组具有信号匹配滤波特性。
三. 雷达天线
(1) 雷达天线的主要功能
通过天线,电磁场在空间和传输线之间传播转换,携带信息。
天线增益G 度量了目标方向上集中辐射的能量。
有效孔径e A 度量了从目标导雷达的后向散射聚集的回波能量。
同时,天线测量回波信号的到达角度,提供目标的方位俯仰信息。
天线通过空间滤波,让来自非主波方向的不需要的信号无法进入,通过频域滤波可以滤除不需要的信号。
另外,可以通过雷达天线确定多次观察目标之间的时间间隔。
对于特定的雷达系统,可通过雷达天线外观来直观地展示雷达特性,相对而言雷达分析统机柜并不能直观显示雷达的各项性能。
(2) 天线参数
天线增益d G :用来度量雷达天线在特定方向上集中发射能量的能力。
分别有方向性增益d G 和功率增益G 。
平均辐射强度
最大辐射强度=d G ,辐射强度指在某特定方向上单位立体角内辐射的功率,表示为),(φθP 。
d G G ρπ==天线收到的净功率功率单位立体角辐射的最大/)(4,10<<ρ,称为天线效率。
功率增益考虑了在天线中的消耗性的损耗,其他方面与方向性增益考量的类似。
波瓣图:即天线辐射方向图,反映了天线的波束宽度、副班电平、差波束宽度等指标。
有效孔径e A :度量天线对入射波呈现的有效面积,24λπe A G =。
极化:指电场的指向,多为线极化,水平或垂直极化。
(3) 反射面天线 D f /比:焦距f 与孔径直径D 之比。
大的比值表示反射面浅,容易支撑和机械定位,馈源离反射面远,需要初级方向图窄且馈源大。
卡塞伦格天线:双反射面天线,常用于单脉冲跟踪雷达。
馈源在或靠近抛物面顶点,不需要到位于抛物面正常焦点馈源的长传输线。
产生方位俯仰和差的硬件设备可以安放在反射器后面,可以减少反射器前面的孔径遮挡。
(4) 相控阵天线
机电(械)扫描扫描速度慢,且可靠性差,相比之下电子扫描通过快速控制移相器的相位,从而让天线的等相位面改变,实现快速高效的天线扫描。
相邻线阵单元之间的相位差θλπφsin )/(2d =∆,来自各个单元的所有电压和为a E 可用θ来表示。
相控阵天线可发射大功率,同时进行搜索和跟踪,通过控制其相位分布可以改变波属形状。
缺点是设计复杂,成本高昂。
分类:线阵和面阵,有源阵和无源阵,强馈阵和空馈阵,共形阵和稀疏阵。
四. 成像技术
(1) 雷达目标识别
目标识别要提取的信息为目标基本特征、类型、种类等,包括:1.将目标回波从复杂环境中分离出来,并从回波中提取能识别目标的特征。
2.用某种判决方法来判定提取出的特征信号属于哪类或哪种目标。
对于动目标识别,可利用MTI 技术将目标从杂波中分离出来。
对于固定目标,可使用固定目标显示(STI )等技术。
(2) 雷达成像
理论上说,高距离分辨力雷达可分辨出一个目标中的不同散射中心,给出目标的径向剖面图,即一维像。
但是由于微小姿态角的变化将引起目标各散射中心的变化,从而造成相对相位的改变,严重影响分辨单元内的总的散射截面积。
所以利用高距离分辨剖面图进行一维成像是不实际的。
一般情况下,一维成像方法为将目标简化为几大类进行识别,即感知分类法。
目标的二维像(横向距离和径向距离)是通过成像雷达来获得。
成像雷达包括合成孔径雷达和逆合成孔径雷达。
原理:
合成孔径雷达:用一个天线作为单个辐射单元,将此单元沿一直线不断移动,在不同位置上接收同一地物的回波信号并进行相关解调压缩处理的侧视雷达。
通过飞机、卫星等雷达载体的运动形成一个巨大的有效天线孔径,从而获得高横向分辨率。
逆合成孔径雷达:利用目标与雷达的相对运动,对目标处于不同视角上的回波信号进行相干处理,重构目标图像的雷达(转动成像原理)。
通过固定雷达检测运动目标,提取目标的转动运动分量。
目标转角越大,横向分辨率越高。