运动控制指令应用示例共16页
- 格式:ppt
- 大小:1.73 MB
- 文档页数:16

台达运动控制应用例目录第1章单轴运动.........................................................................1-11.1原点回归模式...................................................................1-11.2自行规划多段变速度...........................................................1-81.3台达ASDA伺服简单定位展示系统........................................1-161.4手摇轮跟随模式(一)......................................................1-231.5手摇轮跟随模式(二)......................................................1-291.6手摇轮跟随模式(三)......................................................1-35第2章电子凸轮.........................................................................2-12.1电子凸轮(一)–周期性单轴凸轮...........................................2-12.2电子凸轮(二)-非周期性单轴凸轮.......................................2-122.3电子凸轮(三)-多轴凸轮.....................................................2-252.4绕线机应用....................................................................2-322.5电子凸轮应用–旋切控制....................................................2-412.6电子凸轮应用–追剪控制(Fly saw)......................................2-53第3章G-Code应用...................................................................3-13.1G–Code应用-三轴同动绘出Delta LOGO...............................3-13.2M Code应用...................................................................3-63.3GNC载应用-使用PMSoft汇入G-Code.................................3-103.4GNC应用-PMGDL软件下载(一般模式)..............................3-143.5GNC应用-PMGDL软件下载(DNC模式).............................3-223.6GNC应用-使用D Register转G码 ASCII格式下载..................3-283.7GNC应用-使用HMI配方方式透过 USB Disk下载...................3-383.8点胶模式.......................................................................3-49第4章其它应用.........................................................................4-14.1中断应用.........................................................................4-14.2计数器应用......................................................................4-64.3定时器应用....................................................................4-134.4以20PM作为从机应用.....................................................4-16i4.5PWM应用-水闸门控制程序................................................4-194.6高速比较应用.................................................................4-224.7高速捕捉应用.................................................................4-284.8制袋机应用-单段速外部触发模式........................................4-334.9PID应用......................................................................4-38 ii目录1.1 原点回归模式1.2 自行规划多段变速度1.3 台达ASDA伺服简单定位展示系统1.4 手摇轮跟随模式(一)1.5 手摇轮跟随模式(二)1.6 手摇轮跟随模式(三)1-1第1章 单轴运动1-1 1.1 原点回归模式20PM 位置控制与伺服驱动系统系统架构图【范例说明】1. 启动原点回归模式时,不同的启动位置其行走的路径也不同,以原点回归方向正转为例,其行走路径如下图所示:2. 20PM 的原点回归模式的设定参数D1816+80*N( N=0~2 )如以下所示:原点回归方向:原点回归方向可分为正转和反转。
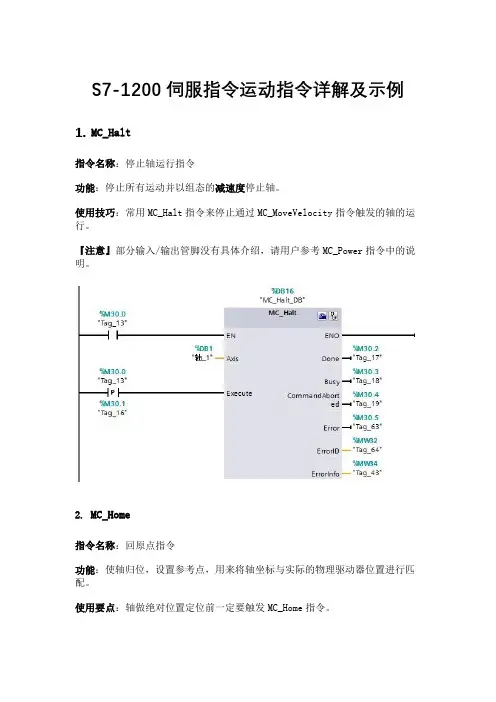
S7-1200伺服指令运动指令详解及示例1. MC_Halt指令名称:停止轴运行指令功能:停止所有运动并以组态的减速度停止轴。
使用技巧:常用MC_Halt指令来停止通过MC_MoveVelocity指令触发的轴的运行。
『注意』部分输入/输出管脚没有具体介绍,请用户参考MC_Power指令中的说明。
2. MC_Home指令名称:回原点指令功能:使轴归位,设置参考点,用来将轴坐标与实际的物理驱动器位置进行匹配。
使用要点:轴做绝对位置定位前一定要触发MC_Home指令。
『注意』部分输入/输出管脚没有具体介绍,请用户参考MC_Power指令中的说明。
①Position:位置值•Mode = 1时:对当前轴位置的修正值•Mode = 0,2,3时:轴的绝对位置值②Mode:回原点模式值•Mode = 0:绝对式直接回零点,轴的位置值为参数“Position”的值•Mode = 1:相对式直接回零点,轴的位置值等于当前轴位置 + 参数“Position”的值•Mode = 2:被动回零点,轴的位置值为参数“Position”的值•Mode = 3:主动回零点,轴的位置值为参数“Position”的值下面详细介绍模式0和模式1.Mode = 0绝对式直接回原点以下图为例进行说明。
该模式下的MC_Home指令触发后轴并不运行,也不会去寻找原点开关。
指令执行后的结果是:轴的坐标值更直接新成新的坐标,新的坐标值就是MC_Home指令的“Position”管脚的数值。
例子中,“Position”=0.0mm,则轴的当前坐标值也就更新成了0.0mm。
该坐标值属于“绝对”坐标值,也就是相当于轴已经建立了绝对坐标系,可以进行绝对运动。
『优点』MC_Home的该模式可以让用户在没有原点开关的情况下,进行绝对运动操作。
Mode = 1相对式直接回原点与Mode = 0相同,以该模式触发MC_Home指令后轴并不运行,只是更新轴的当前位置值。
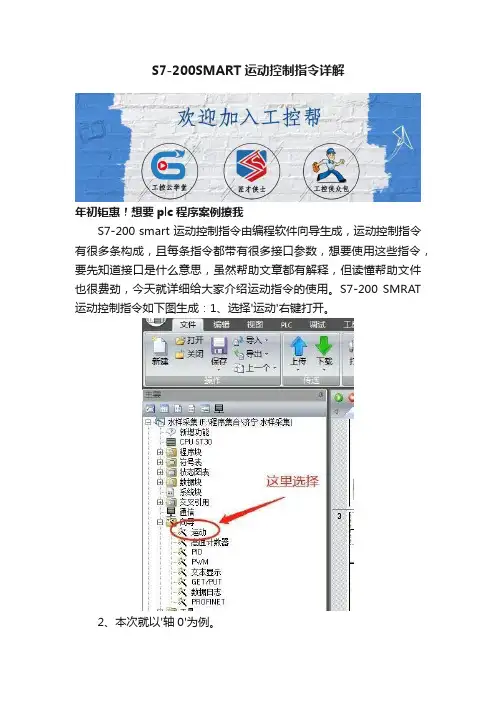
S7-200SMART运动控制指令详解年初钜惠!想要plc程序案例撩我S7-200 smart 运动控制指令由编程软件向导生成,运动控制指令有很多条构成,且每条指令都带有很多接口参数,想要使用这些指令,要先知道接口是什么意思,虽然帮助文章都有解释,但读懂帮助文件也很费劲,今天就详细给大家介绍运动指令的使用。
S7-200 SMRAT 运动控制指令如下图生成:1、选择'运动'右键打开。
2、本次就以'轴0'为例。
3、命个名字。
4、数字1位选择工程单位,可以使工程单位,也可以使用脉冲。
数字2是电机旋转一圈的脉冲量,我目前步进拨码设定是10000个脉冲旋转一周数字3是单位,根据自己需要设定数字4是电机旋转一圈的工程量,我设定的是360度,也就是说10000个脉冲对应360度。
5、方向控制,我是用的脉冲加方向,所以选择单项2轴。
6、正负极限根据需要设定,我这个没有正负极限就没有选择。
7、零电位使用,走绝对位置和相对位置之前一定要定义好原点,否则绝对位置和相对位置不运行。
8、0脉冲位置,也可以使用此点定义0点。
9、停止根据需要选择,通过阅读STP就能理解什么意思。
10、停止根据需要选择,通过阅读TRIG就能理解什么意思。
11、禁用根据需要选择,通过阅读DIS就能理解什么意思。
12、最大速度和最小速度根据现场情况设定,我设定最大速度为360度/秒。
13、JOG命令也就是手动运行,根据需要设定速度,建议设定小一些,看看运行速度再调整。
14、此处设定加减速时间,也就是脉冲输出的加减速时间,根据现场情况设定。
15、急停补偿。
16、反冲补偿,也就是校准丝杠间隙。
17、参考点设定18、找零点时速度和方向设定。
19、偏移量设定20、搜索参考点方式选择21、从驱动器中读取绝对位置22、曲线设定,我这里没用曲线,没有生成曲线。
23、点'建议'自动分配地址。
24、组件25、映射显示26、完成,点击生成就完成了。
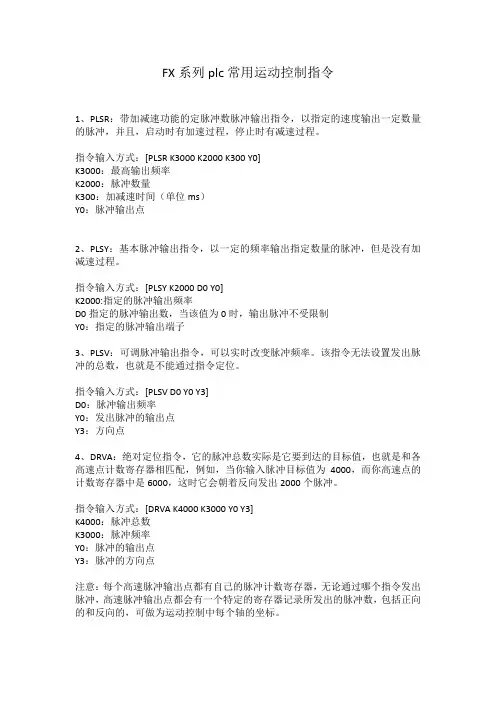
FX系列plc常用运动控制指令1、PLSR:带加减速功能的定脉冲数脉冲输出指令,以指定的速度输出一定数量的脉冲,并且,启动时有加速过程,停止时有减速过程。
指令输入方式:[PLSR K3000 K2000 K300 Y0]K3000:最高输出频率K2000:脉冲数量K300:加减速时间(单位ms)Y0:脉冲输出点2、PLSY:基本脉冲输出指令,以一定的频率输出指定数量的脉冲,但是没有加减速过程。
指令输入方式:[PLSY K2000 D0 Y0]K2000:指定的脉冲输出频率D0指定的脉冲输出数,当该值为0时,输出脉冲不受限制Y0:指定的脉冲输出端子3、PLSV:可调脉冲输出指令,可以实时改变脉冲频率。
该指令无法设置发出脉冲的总数,也就是不能通过指令定位。
指令输入方式:[PLSV D0 Y0 Y3]D0:脉冲输出频率Y0:发出脉冲的输出点Y3:方向点4、DRVA:绝对定位指令,它的脉冲总数实际是它要到达的目标值,也就是和各高速点计数寄存器相匹配,例如,当你输入脉冲目标值为4000,而你高速点的计数寄存器中是6000,这时它会朝着反向发出2000个脉冲。
指令输入方式:[DRVA K4000 K3000 Y0 Y3]K4000:脉冲总数K3000:脉冲频率Y0:脉冲的输出点Y3:脉冲的方向点注意:每个高速脉冲输出点都有自己的脉冲计数寄存器,无论通过哪个指令发出脉冲,高速脉冲输出点都会有一个特定的寄存器记录所发出的脉冲数,包括正向的和反向的,可做为运动控制中每个轴的坐标。
5、DRVI:相对定位指令,它的脉冲总数是以当前位置为起点将要运动的距离,而不考虑高速点计数器中的脉冲数。
指令输入方式:[DRVI K4000 K3000 Y0 Y3]K4000:脉冲总数K3000:脉冲频率Y0:脉冲的输出点Y3:脉冲的方向点6、ZRN:回原点指令,该指令触发后PLC开始输出脉冲控制电机以第一速度运动,在原点信号的上升沿切换到第二速度运动,在原点信号的下降沿停止运动。
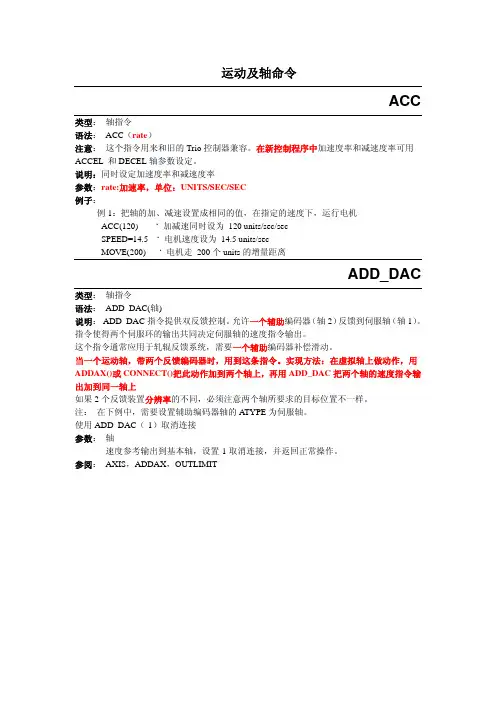
运动及轴命令ACC类型:轴指令语法: ACC(rate)注意:这个指令用来和旧的Trio控制器兼容。
在新控制程序中加速度率和减速度率可用ACCEL 和DECEL轴参数设定。
说明:同时设定加速度率和减速度率参数:rate:加速率,单位:UNITS/SEC/SEC例子:例1:把轴的加、减速设置成相同的值,在指定的速度下,运行电机ACC(120) ‘ 加减速同时设为 120 units/sec/secSPEED=14.5 ‘ 电机速度设为 14.5 units/secMOVE(200) ‘ 电机走 200个units的增量距离ADD_DAC类型:轴指令语法: ADD_DAC(轴)说明: ADD_DAC指令提供双反馈控制。
允许一个辅助编码器(轴2)反馈到伺服轴(轴1)。
指令使得两个伺服环的输出共同决定伺服轴的速度指令输出。
这个指令通常应用于轧辊反馈系统,需要一个辅助编码器补偿滑动。
当一个运动轴,带两个反馈编码器时,用到这条指令。
实现方法:在虚拟轴上做动作,用ADDAX()或CONNECT()把此动作加到两个轴上,再用ADD_DAC把两个轴的速度指令输出加到同一轴上如果2个反馈装置分辨率的不同,必须注意两个轴所要求的目标位置不一样。
注:在下例中,需要设置辅助编码器轴的ATYPE为伺服轴。
使用ADD_DAC(-1)取消连接参数:轴速度参考输出到基本轴,设置-1取消连接,并返回正常操作。
参阅: AXIS,ADDAX,OUTLIMIT例1:BASE(1)‘使两轴编码器在相同的线性距离反馈回相同的计数ENCODER_RATIO(counts_per_mm2, counts_per_mm1)UNITS AXIS(1) = counts_per_mm1UNITS AXIS(2) = counts_per_mm1 ‘ 单位必须相同ADD_DAC(2) ' 把轴2 的DAC_OUT叠加到轴1上ADDAX(1) AXIS(2) ' 把轴1的轨迹加到轴2上‘到现在,两轴已经准备就绪MOVE(1200)WAIT IDLEADDAX类型:运动控制指令语法: ADDAX(轴号)说明: ADDAX指令将2个或多个的运动叠加形成较复杂的运动轨迹。
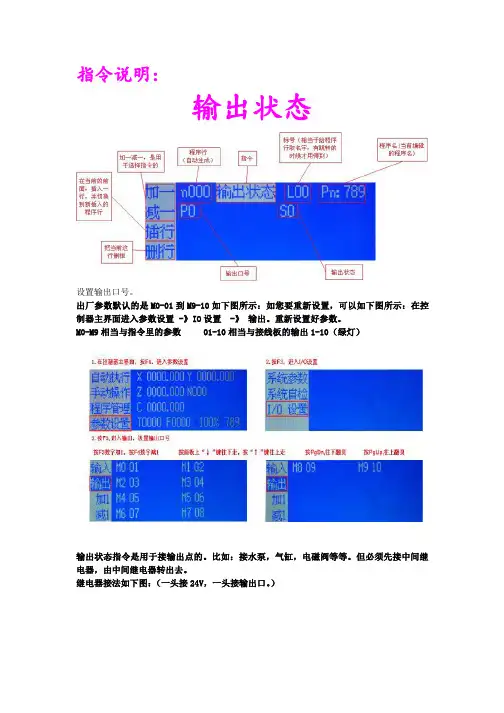
指令说明:输出状态设置输出口号。
出厂参数默认的是M0-01到M9-10如下图所示:如您要重新设置,可以如下图所示:在控制器主界面进入参数设置-》IO设置-》输出。
重新设置好参数。
M0-M9相当与指令里的参数01-10相当与接线板的输出1-10(绿灯)输出状态指令是用于接输出点的。
比如:接水泵,气缸,电磁阀等等。
但必须先接中间继电器,由中间继电器转出去。
继电器接法如下图:(一头接24V,一头接输出口。
)参数:P(输出口号),S(输出状态)取值范围:P(0-9),S(0:关,1:开)(特殊指令)输入控制输出在参数设置画面下(主画面进入“参数设置”),按“空格”键进入此设置。
显示“入00态00出00态00类00”共四行。
入:指输入口号(1-10)态:指相应的输入口为0/1时有效出:批输出态号(0-9),对应于M0-M9态:指相应的输出态为0/1类:0:电平状态:相应的输入口与其态相符时使输出态置为相应的输出状态1:脉冲方式:相应的输入口触发一次使输出态置为相应的输出状态注:输入口为零时无效最多可设置四个延时等待延时相应时间。
时间单位0.1/0.01秒参数:T(延时的时间)。
取值范围:(0-99999)当T为0时执行暂停功能,暂停后按面板上的启动键继续。
时间单位:0.1秒默认的是0.1秒,如需时间更精确的话,在控制器界面进入参数设置-》系统参数-》选项(0.01秒)如下图时间单位:0.01秒直线插补沿直线,以F速度×速度倍率,运动给定的增量值。
此运动受速度倍率的影响,且与当前F速度有关。
参数:X,Y,Z,C(向运动增量)F(运动速度,如F速度为0,默认速度300,数值越大速度越高)注:F为0,受上直线插补、测位运动、圆弧指令速度的影响参数:P(输入口号)S(输入口状态)取值范围:P(1-10)S(0,1)P参数(非0)选择的输入口S状态为(0/1)时等待。
(用与常开、常闭)常开常闭接法:(三线传感器:一头接输入点,另外两头分别接24V,24G)(二线传感器:一头接输入点,另外一头接24G)当P为0,S为1时,执行无限运动。
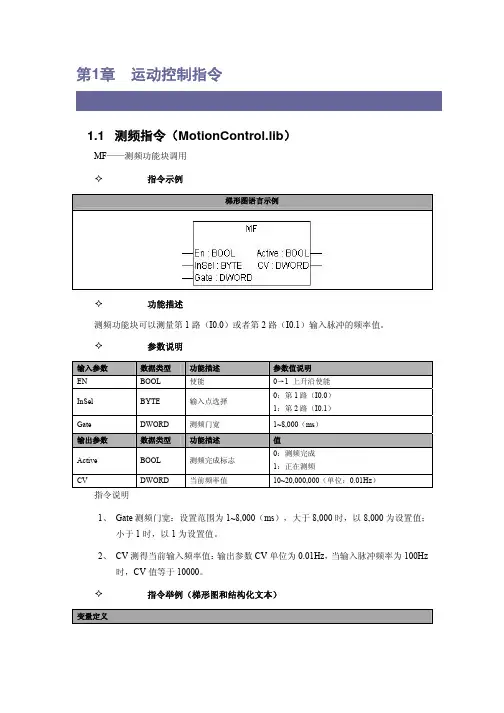
第1章 运动控制指令1.1 测频指令(MotionControl.lib )MF ——测频功能块调用指令示例梯形图语言示例功能描述测频功能块可以测量第1路(I0.0)或者第2路(I0.1)输入脉冲的频率值。
参数说明输入参数数据类型功能描述参数值说明 EN BOOL 使能 0→1 上升沿使能 InSel BYTE 输入点选择0:第1路(I0.0) 1:第2路(I0.1)Gate DWORD 测频门宽 1~8,000(ms ) 输出参数数据类型功能描述值Active BOOL 测频完成标志0:测频完成 1:正在测频CV DWORD 当前频率值 10~20,000,000(单位:0.01Hz )指令说明1、 Gate 测频门宽:设置范围为1~8,000(ms ),大于8,000时,以8,000为设置值;小于1时,以1为设置值。
2、 CV 测得当前输入频率值:输出参数CV 单位为0.01Hz ,当输入脉冲频率为100Hz时,CV 值等于10000。
指令举例(梯形图和结构化文本)变量定义编程语言程序梯形图(LD)结构化文本(ST)程序说明:¾En由False变为True并保持时,I0.0通道接收脉冲,测频指令测量当前输入脉冲的频率,dwCV显示当前接收到脉冲的频率,Active等于1并保持。
¾En由True变为False时,Active等于0,dwCV等于0。
1.2 高速计数指令(MotionControl.lib)COUNT——高速计数功能块调用指令示例梯形图语言示例功能描述高速计数功能块可以实现A、B相计数和单相计数,可选择为增计数或者减计数,计数值达到设定值后可以选择是否启动中断。
在A、B相计数时,可接收90º±60º范围的相差。
计数值范围要求在-2147483648~2147483647。
参数说明输入参数数据类型功能描述参数值说明EN BOOL 使能 0→1 上升沿使能 Clr BOOL 清零0→1 上升沿使能InSel BYTE 输入点选择0:第1路(I0.0)单相计数,计数方向对应I0.41:第2路(I0.1)单相计数,计数方向对应I0.52:第3路(I0.2)单相计数,计数方向对应I0.63:第4路(I0.3)单相计数,计数方向对应I0.74:第1路(A相I0.0和B 相I0.1)双相计数 5:第2路(A 相I0.2和B 相I0.3)双相计数Mode BYTE 倍频模式 单相计数可为1和2,双相计数可为1、2和4PV DINT 设定计数值-2147483648~2147483647UpDn BYTE 计数方向控制 双相计数设置该项无效,单相计数设置该项有效。
TRIO 常用指令使用BASIC运动控制编程语言ACC类型:运动控制指令语法:ACC(acc率)注意:加速度率和减速度率可用ACCEL 和DECEL轴参数设定。
说明:同时设定加速度率和减速度率参数:acc率: 参数单位决定于单位轴参数。
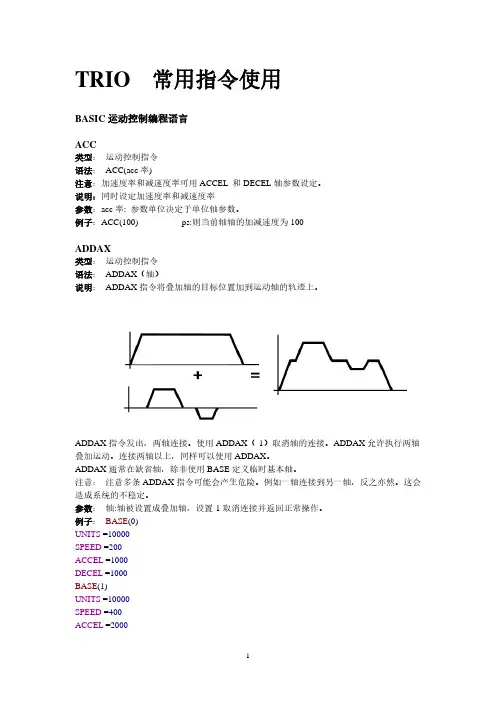
例子:ACC(100) ps:则当前轴轴的加减速度为100ADDAX类型:运动控制指令语法:ADDAX(轴)说明:ADDAX指令将叠加轴的目标位置加到运动轴的轨迹上。
ADDAX指令发出,两轴连接。
使用ADDAX(-1)取消轴的连接。
ADDAX允许执行两轴叠加运动。
连接两轴以上,同样可以使用ADDAX。
ADDAX通常在缺省轴,除非使用BASE定义临时基本轴。
注意:注意多条ADDAX指令可能会产生危险。
例如一轴连接到另一轴,反之亦然。
这会造成系统的不稳定。
参数:轴:轴被设置成叠加轴,设置-1取消连接并返回正常操作。
例子:BASE(0)UNITS =10000SPEED =200ACCEL =1000DECEL =1000BASE(1)UNITS =10000SPEED =400ACCEL =2000DECEL =2000TRIGGERFORWARD AXIS(0)ADDAX(1) AXIS(0)WHILE TRUEWA(5000)MOVE(1000) AXIS(1)WA(5000)MOVE(-1000) AXIS(1)WENDAXIS类型:运动控制指令语法:AXIS(轴数)说明:AXIS修改设置单轴运动指令或单轴参数读写。
AXIS参数在命令行或程序行特别有效。
使用BASE指令改变基本轴。
参数:轴数:任何有效的BASIC表达式特定轴数。
例子:speed axis(1)=100 '修改轴1的速度BASE类型:运动控制指令语法:BASE(轴1,轴2,轴3)BASE参数:BA(轴1,轴2,轴3)BA说明:BASE指令用于设置缺省轴或特定轴组。
所有顺序运动指令和轴的参数会应用于基本轴或特定轴组,除非BASE指令定义暂时基本轴。