自动控制原理习题和解答第三章
- 格式:doc
- 大小:530.00 KB
- 文档页数:16
⾃动控制原理第三章课后习题答案3-1 设系统的微分⽅程式如下:(1) )(2)(2.0t r t c =&(2) )()()(24.0)(04.0t r t c t c t c =++&&&试求系统闭环传递函数Φ(s),以及系统的单位脉冲响应g(t)和单位阶跃响应c(t)。
已知全部初始条件为零。
解:(1)因为)(2)(2.0s R s sC =闭环传递函数ss R s C s 10)()()(==Φ单位脉冲响应:s s C /10)(= 010)(≥=t t g单位阶跃响应c(t) 2/10)(s s C = 010)(≥=t t t c(2))()()124.004.0(2s R s C s s =++ 124.004.0)()(2++=s s s R s C 闭环传递函数124.004.01)()()(2++==s s s R s C s φ单位脉冲响应:124.004.01)(2++=s s s C t e t g t 4sin 325)(3-= 单位阶跃响应h(t) 16)3(61]16)3[(25)(22+++-=++=s s s s s s Ct e t e t c t t 4sin 434cos 1)(33----=3-2 温度计的传递函数为11+Ts ,⽤其测量容器内的⽔温,1min 才能显⽰出该温度的98%的数值。
若加热容器使⽔温按10oC/min 的速度匀速上升,问温度计的稳态指⽰误差有多⼤?解法⼀依题意,温度计闭环传递函数11)(+=ΦTs s 由⼀阶系统阶跃响应特性可知:o o T c 98)4(=,因此有 min 14=T ,得出 min 25.0=T 。
视温度计为单位反馈系统,则开环传递函数为Tss s s G 1)(1)()(=Φ-Φ===11v TK ⽤静态误差系数法,当t t r ?=10)( 时,C T Ke ss ?===5.21010。

3-1(1) )(2)(2.0t r t c= (2) )()()(24.0)(04.0t r t c t c t c=++ 试求系统闭环传递函数Φ(s),以及系统的单位脉冲响应g(t)和单位阶跃响应c(t)。
已知全部初始条件为零。
解:(1) 因为)(2)(2.0s R s sC =闭环传递函数ss R s C s 10)()()(==Φ 单位脉冲响应:s s C /10)(= 010)(≥=t t g单位阶跃响应c(t) 2/10)(s s C = 010)(≥=t t t c(2))()()124.004.0(2s R s C s s =++ 124.004.0)()(2++=s s s R s C 闭环传递函数124.004.01)()()(2++==s s s R s C s φ 单位脉冲响应:124.004.01)(2++=s s s C t e t g t 4sin 325)(3-= 单位阶跃响应h(t) 16)3(61]16)3[(25)(22+++-=++=s s s s s s Ct e t e t c t t 4sin 434cos 1)(33----=3-2 温度计的传递函数为11+Ts ,用其测量容器内的水温,1min 才能显示出该温度的98%的数值。
若加热容器使水温按10ºC/min 的速度匀速上升,问温度计的稳态指示误差有多大?解法一 依题意,温度计闭环传递函数11)(+=ΦTs s 由一阶系统阶跃响应特性可知:o o T c 98)4(=,因此有 min 14=T ,得出 min 25.0=T 。
视温度计为单位反馈系统,则开环传递函数为Ts s s s G 1)(1)()(=Φ-Φ= ⎩⎨⎧==11v T K用静态误差系数法,当t t r ⋅=10)( 时,C T Ke ss ︒===5.21010。
解法二 依题意,系统误差定义为 )()()(t c t r t e -=,应有 1111)()(1)()()(+=+-=-==ΦTs TsTs s R s C s R s E s e C T s Ts Ts ss R s s e s e s ss ︒==⋅+=Φ=→→5.210101lim )()(lim 23-3 已知二阶系统的单位阶跃响应为)1.536.1sin(5.1210)(2.1o tt et c +-=-试求系统的超调量σ%、峰值时间tp 和调节时间ts 。



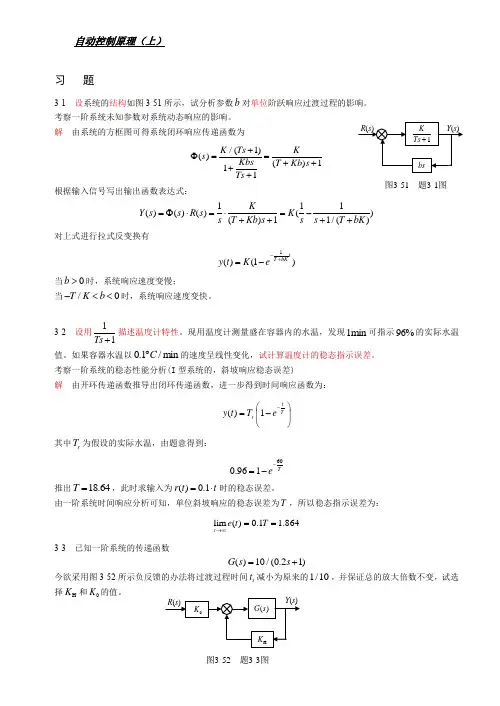
自动控制原理(上)习 题3-1 设系统的结构如图3-51所示,试分析参数b 对单位阶跃响应过渡过程的影响。
考察一阶系统未知参数对系统动态响应的影响。
解 由系统的方框图可得系统闭环响应传递函数为/(1)()()111K Ts Ks Kbs T Kb s Ts +Φ==++++ 根据输入信号写出输出函数表达式:111()()()()()11/()K Y s s R s K s T Kb s s s T bK =Φ⋅=⋅=-++++对上式进行拉式反变换有1()(1)t T bKy t K e-+=-当0b >时,系统响应速度变慢;当/0T K b -<<时,系统响应速度变快。
3-2 设用11Ts +描述温度计特性。
现用温度计测量盛在容器内的水温,发现1min 可指示96%的实际水温值。
如果容器水温以0.1/min C ︒的速度呈线性变化,试计算温度计的稳态指示误差。
考察一阶系统的稳态性能分析(I 型系统的,斜坡响应稳态误差)解 由开环传递函数推导出闭环传递函数,进一步得到时间响应函数为:()1t T r y t T e -⎛⎫=- ⎪⎝⎭其中r T 为假设的实际水温,由题意得到:600.961Te-=-推出18.64T =,此时求输入为()0.1r t t =⋅时的稳态误差。
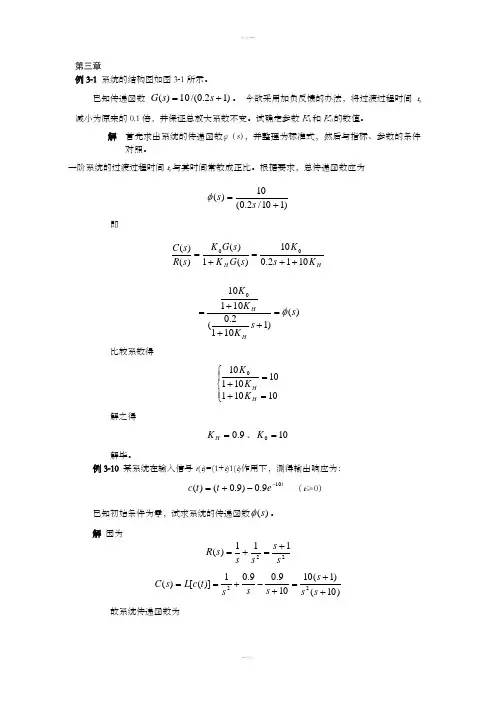
由一阶系统时间响应分析可知,单位斜坡响应的稳态误差为T ,所以稳态指示误差为:lim ()0.1 1.864t e t T →∞==3-3 已知一阶系统的传递函数()10/(0.21)G s s =+今欲采用图3-52所示负反馈的办法将过渡过程时间s t 减小为原来的1/10,并保证总的放大倍数不变,试选择H K 和0K 的值。
解 一阶系统的调节时间s t 与时间常数成正比,则根据要求可知总的传递函数为10()(0.2/101)s s Φ=+由图可知系统的闭环传递函数为000(10()()1()0.211010110()0.21110H HHHK G s K Y s R s K G s s K K K s s K ==++++==Φ++)比较系数有101011011010HHK K K ⎧=⎪+⎨⎪+=⎩ 解得00.9,10H K K ==3-4 已知二阶系统的单位阶跃响应为1.5()1012sin(1.6+53.1t y t e t -=-)试求系统的超调量%σ,峰值时间p t ,上升时间r t 和调节时间s t 。
第三章例3-1 系统的结构图如图3-1所示。
已知传递函数 )12.0/(10)(+=s s G 。
今欲采用加负反馈的办法,将过渡过程时间t s减小为原来的0.1倍,并保证总放大系数不变。
试确定参数K h 和K 0的数值。
解 首先求出系统的传递函数φ(s ),并整理为标准式,然后与指标、参数的条件对照。
一阶系统的过渡过程时间t s 与其时间常数成正比。
根据要求,总传递函数应为)110/2.0(10)(+=s s φ即HH K s K s G K s G K s R s C 1012.010)(1)()()(00++=+= )()11012.0(101100s s K K K HHφ=+++=比较系数得⎪⎩⎪⎨⎧=+=+1010110101100H HK K K 解之得9.0=H K 、100=K解毕。
例3-10 某系统在输入信号r (t )=(1+t )1(t )作用下,测得输出响应为:t e t t c 109.0)9.0()(--+= (t ≥0)已知初始条件为零,试求系统的传递函数)(s φ。
解 因为22111)(ss s s s R +=+=)10()1(10109.09.01)]([)(22++=+-+==s s s s s s t c L s C 故系统传递函数为11.01)()()(+==s s R s C s φ 解毕。
例3-3 设控制系统如图3-2所示。
试分析参数b 的取值对系统阶跃响应动态性能的影响。
解 由图得闭环传递函数为1)()(++=s bK T Ks φ系统是一阶的。
动态性能指标为)(3)(2.2)(69.0bK T t bK T t bK T t s r d +=+=+= 因此,b 的取值大将会使阶跃响应的延迟时间、上升时间和调节时间都加长。
解毕。
例 3-12 设二阶控制系统的单位阶跃响应曲线如图3-34所示。
试确定系统的传递函数。
解 首先明显看出,在单位阶跃作用下响应的稳态值为3,故此系统的增益不是1,而是3。

3-1 设系统的微分方程式如下:(1) )(2)(2.0t r t c =&(2) )()()(24.0)(04.0t r t c t c t c =++&&&试求系统闭环传递函数Φ(s),以及系统的单位脉冲响应g(t)和单位阶跃响应c(t)。
已知全部初始条件为零。
解:(1) 因为)(2)(2.0s R s sC = 闭环传递函数ss R s C s 10)()()(==Φ 单位脉冲响应:s s C /10)(= 010)(≥=t t g单位阶跃响应c(t) 2/10)(s s C = 010)(≥=t t t c(2))()()124.004.0(2s R s C s s =++ 124.004.0)()(2++=s s s R s C 闭环传递函数124.004.01)()()(2++==s s s R s C s φ 单位脉冲响应:124.004.01)(2++=s s s C t e t g t 4sin 325)(3-= 单位阶跃响应h(t) 16)3(61]16)3[(25)(22+++-=++=s s s s s s Ct e t e t c t t 4sin 434cos 1)(33----=3-2 温度计的传递函数为11+Ts ,用其测量容器内的水温,1min 才能显示出该温度的98%的数值。
若加热容器使水温按10ºC/min 的速度匀速上升,问温度计的稳态指示误差有多大?解法一 依题意,温度计闭环传递函数11)(+=ΦTs s 由一阶系统阶跃响应特性可知:o o T c 98)4(=,因此有 min 14=T ,得出 min 25.0=T 。
视温度计为单位反馈系统,则开环传递函数为Tss s s G 1)(1)()(=Φ-Φ=⎩⎨⎧==11v TK 用静态误差系数法,当t t r ⋅=10)( 时,C T Ke ss ︒===5.21010。
第三章 线性系统的时域分析与校正练习题及答案3-1 已知系统脉冲响应t e t k 25.10125.0)(-=试求系统闭环传递函数)(s Φ。
解 Φ()()./(.)s L k t s ==+00125125 3-2 设某高阶系统可用下列一阶微分方程T c t c t r t r t ∙∙+=+()()()()τ近似描述,其中,1)(0<-<τT 。
试证系统的动态性能指标为 T T T t d ⎥⎦⎤⎢⎣⎡⎪⎭⎫⎝⎛-+=τln 693.0t T r =22. T T T t s ⎥⎦⎤⎢⎣⎡-+=)ln(3τ 解 设单位阶跃输入ss R 1)(=当初始条件为0时有:11)()(++=Ts s s R s C τ 11111)(+--=⋅++=∴Ts T s s Ts s s C ττC t h t T Te t T()()/==---1τ 1) 当 t t d = 时h t T Te t td ()./==---051τ12=--T T e t T d τ/ ; T t T T d -⎪⎭⎫ ⎝⎛-=-τln 2ln ⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛-+=∴T T T t d τln 2ln2) 求t r (即)(t c 从1.0到9.0所需时间)当 Tt e TT t h /219.0)(---==τ; t T T T 201=--[ln()ln .]τ 当 Tt e TT t h /111.0)(---==τ; t T T T 109=--[ln()ln .]τ 则 t t t T T r =-==21090122ln ... 3) 求 t sTt s s e TT t h /195.0)(---==τ ]ln 3[]20ln [ln ]05.0ln [ln TT T T T T T T T t s τττ-+=+-=--=∴3-3 一阶系统结构图如图3-45所示。
要求系统闭环增益2=ΦK ,调节时间4.0≤s t s ,试确定参数21,K K 的值。
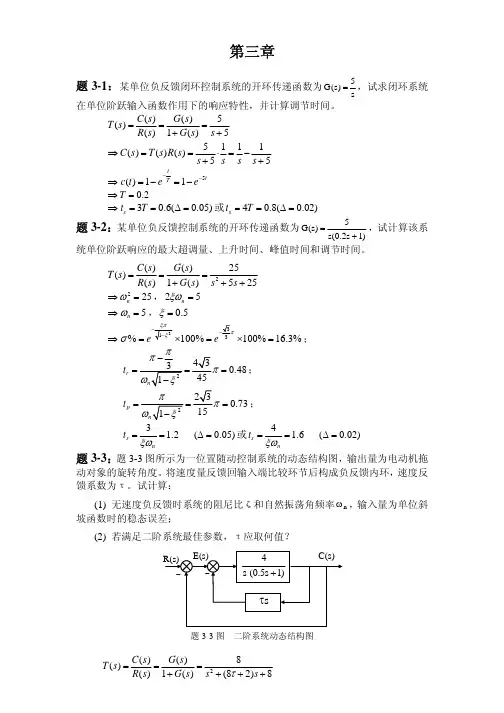
自动控制理论第三章作业答案题3-4解:系统的闭环传递函数为2()()1()1()1C s G s R s G s s s ==+++ 由二阶系统的标准形式可以得到11, 2n ωζ==因此,上升时间 2.418r dd t s ππβωω--===峰值时间 3.6276p d t s πω=== 调整时间:35% 642% 8s n s n t s t s ωζωζ∆=≈=∆=≈=超调量:100%16.3%p M e =⨯=题3-5解:22()10()(51)10102510.60.5589n n n C s R s s a s a a ωωζωζ=+++⎧=⎧=⎪⎪⇒⇒⎨⎨=+==⎪⎩⎪⎩⇒=闭环传递函数1.242100%9.45%pdpt sM eπω====⨯=35% 1.58142% 2.108snsnt st sωζωζ∆=≈=∆=≈=题3-7解:0.11.31100%30%1pdptM eπω===-=⨯==上升时间超调量=0.357933.64nζω⎧⇒⎨=⎩221131.9()(2)24.08nnG ss s s sωζω==++开环传递函数题3-8(1)2100()(824)G ss s s=++解:闭环传递函数为2()100()(824)100C sR s s s s=+++特征方程为328241000s s s+++=列出劳斯表:3212408100011.50100ssss第一列都是正数,所以系统稳定(2)10(1)()(1)(5)sG ss s s+=-+解:闭环传递函数()10(1)()(1)(5)10(1)C s s R s s s s s +=-+++ 特征方程为3255100s s s +++=列出劳斯表:32015041002.5010s s ss 第一列都是正数,所以系统稳定 (3)10()(1)(23)G s s s s =-+ 解:闭环传递函数()10()(1)(23)10C s R s s s s =-++ 特征方程为3223100s s s +-+=列出劳斯表:3210230110023010s s ss --劳斯表第一列的数符号变了2次,因此在s 平面的右半部分有两个特征根,系统不稳定。
3-1(1) )(2)(2.0t r t c= (2) )()()(24.0)(04.0t r t c t c t c=++ 试求系统闭环传递函数Φ(s),以及系统的单位脉冲响应g(t)和单位阶跃响应c(t)。
已知全部初始条件为零。
解:(1) 因为)(2)(2.0s R s sC =闭环传递函数ss R s C s 10)()()(==Φ 单位脉冲响应:s s C /10)(= 010)(≥=t t g单位阶跃响应c(t) 2/10)(s s C = 010)(≥=t t t c(2))()()124.004.0(2s R s C s s =++ 124.004.0)()(2++=s s s R s C 闭环传递函数124.004.01)()()(2++==s s s R s C s φ 单位脉冲响应:124.004.01)(2++=s s s C t e t g t 4sin 325)(3-= 单位阶跃响应h(t) 16)3(61]16)3[(25)(22+++-=++=s s s s s s Ct e t e t c t t 4sin 434cos 1)(33----=3-2 温度计的传递函数为11+Ts ,用其测量容器内的水温,1min 才能显示出该温度的98%的数值。
若加热容器使水温按10ºC/min 的速度匀速上升,问温度计的稳态指示误差有多大?解法一 依题意,温度计闭环传递函数11)(+=ΦTs s 由一阶系统阶跃响应特性可知:o o T c 98)4(=,因此有 min 14=T ,得出 min 25.0=T 。
视温度计为单位反馈系统,则开环传递函数为Ts s s s G 1)(1)()(=Φ-Φ= ⎩⎨⎧==11v T K用静态误差系数法,当t t r ⋅=10)( 时,C T Ke ss ︒===5.21010。
解法二 依题意,系统误差定义为 )()()(t c t r t e -=,应有 1111)()(1)()()(+=+-=-==ΦTs TsTs s R s C s R s E s e C T s Ts Ts ss R s s e s e s ss ︒==⋅+=Φ=→→5.210101lim )()(lim 23-3 已知二阶系统的单位阶跃响应为)1.536.1sin(5.1210)(2.1o tt et c +-=-试求系统的超调量σ%、峰值时间tp 和调节时间ts 。
第三章例3-1 系统的结构图如图3-1所示。
已知传递函数 )12.0/(10)(+=s s G 。
今欲采用加负反馈的办法,将过渡过程时间t s减小为原来的0.1倍,并保证总放大系数不变。
试确定参数K h 和K 0的数值。
解 首先求出系统的传递函数φ(s ),并整理为标准式,然后与指标、参数的条件对照。
一阶系统的过渡过程时间t s 与其时间常数成正比。
根据要求,总传递函数应为)110/2.0(10)(+=s s φ即HH K s K s G K s G K s R s C 1012.010)(1)()()(00++=+= )()11012.0(101100s s K K K HHφ=+++=比较系数得⎪⎩⎪⎨⎧=+=+1010110101100H HK K K 解之得9.0=H K 、100=K解毕。
例3-10 某系统在输入信号r (t )=(1+t )1(t )作用下,测得输出响应为:t e t t c 109.0)9.0()(--+= (t ≥0)已知初始条件为零,试求系统的传递函数)(s φ。
解 因为22111)(ss s s s R +=+=)10()1(10109.09.01)]([)(22++=+-+==s s s s s s t c L s C 故系统传递函数为11.01)()()(+==s s R s C s φ 解毕。
例3-3 设控制系统如图3-2所示。
试分析参数b 的取值对系统阶跃响应动态性能的影响。
解 由图得闭环传递函数为1)()(++=s bK T Ks φ系统是一阶的。
动态性能指标为)(3)(2.2)(69.0bK T t bK T t bK T t s r d +=+=+= 因此,b 的取值大将会使阶跃响应的延迟时间、上升时间和调节时间都加长。
解毕。
例 3-12 设二阶控制系统的单位阶跃响应曲线如图3-34所示。
试确定系统的传递函数。
解 首先明显看出,在单位阶跃作用下响应的稳态值为3,故此系统的增益不是1,而是3。
系统模型为22223)(nn ns s s ωξωωφ++=然后由响应的%p M 、p t 及相应公式,即可换算出ξ、n ω。
%33334)()()(%=-=∞∞-=c c t c M p p1.0=p t (s )1+Ts Kbs4 30 0.1 t图3-34 二阶控制系统的单位阶跃响应 h (t )由公式得%33%21/==--ξπξe M p1.012=-=ξωπn p t换算求解得: 33.0=ξ、 2.33=n ω解毕。
例3-13 设系统如图3-35所示。
如果要求系统的超调量等于%15,峰值时间等于0.8s ,试确定增益K 1和速度反馈系数K t 。
同时,确定在此K 1和K t 数值下系统的延迟时间、上升时间和调节时间。
解 由图示得闭环特征方程为0)1(112=+++K s K K s t即21n K ω=,nnt t K ωωξ212+=由已知条件8.0115.0%21/2=-===--tn p p t e M t t ξωπξπξ解得1588.4,517.0-==s n t ωξ于是05.211=K 178.0211==-K K nt t ωξs t nt t d 297.02.06.012=++=ωξξR (C (图3-35)1(1+s s K1+Ks t tn t tn r 538.01arccos 122=--=--=ξωξπξωβπs t nt s 476.15.3==ωξ解毕。
例3-14 设控制系统如图3-36所示。
试设计反馈通道传递函数H (s ),使系统阻尼比提高到希望的ξ1值,但保持增益K 及自然频率ωn 不变。
解 由图得闭环传递函数)(2)(2222s H K s s K s n n n n ωωξωωφ+++=在题意要求下,应取 s K s H t =)( 此时,闭环特征方程为:0)2(22=+++n n n t s KK s ωωωξ令: 122ξωξ=+n t KK ,解出,n t K K ωξξ/)(21-=故反馈通道传递函数为:nK ss H ωξξ)(2)(1-=解毕。
例3-15 系统特征方程为020510203023456=+++++s s s s s试判断系统的稳定性。
解 特征式各项系数均大于零,是保证系统稳定的必要条件。
上述方程中s 一次项的系数为零,故系统肯定不稳定。
解毕。
例3-16 已知系统特征方程式为R (C (图3-36例3-14 控制系统结构图H (s )2222nn n s s K ωξωω++0516188234=++++s s s s试用劳斯判据判断系统的稳定情况。
解 劳斯表为4s 1 1853s 8 162s168161188=⨯-⨯ 580158=⨯-⨯1s 5.1316581616=⨯-⨯ 00s 55.1301655.13=⨯-⨯由于特征方程式中所有系数均为正值,且劳斯行列表左端第一列的所有项均具有正号,满足系统稳定的充分和必要条件,所以系统是稳定的。
解毕。
例3-17 已知系统特征方程为053222345=+++++s s s s s试判断系统稳定性。
解 本例是应用劳斯判据判断系统稳定性的一种特殊情况。
如果在劳斯行列表中某一行的第一列项等于零,但其余各项不等于零或没有,这时可用一个很小的正数ε来代替为零的一项,从而可使劳斯行列表继续算下去。
劳斯行列式为5s 1 2 3 4s 1 2 5 3s 0≈ε 2-2sεε22+ 51s 225442+---εεε0s 5由劳斯行列表可见,第三行第一列系数为零,可用一个很小的正数ε来代替;第四行第一列系数为(2ε+2/ε,当ε趋于零时为正数;第五行第一列系数为(-4ε-4-5ε2)/(2ε+2),当ε趋于零时为2-。
由于第一列变号两次,故有两个根在右半s 平面,所以系统是不稳定的。
解毕。
例3-18 已知系统特征方程为0161620128223456=++++++s s s s s s试求:(1)在s 右半平面的根的个数;(2)虚根。
解 如果劳斯行列表中某一行所有系数都等于零,则表明在根平面内存在对原点对称的实根,共轭虚根或(和)共轭复数根。
此时,可利用上一行的系数构成辅助多项式,并对辅助多项式求导,将导数的系数构成新行,以代替全部为零的一行,继续计算劳斯行列表。
对原点对称的根可由辅助方程(令辅助多项式等于零)求得。
劳斯行列表为6s 1 8 20 16 5s 2 12 16 4s 2 12 16 3s 0 0由于3s 行中各项系数全为零,于是可利用4s 行中的系数构成辅助多项式,即16122)(24++=s s s P求辅助多项式对s 的导数,得s s ss dP 248)(3+= 原劳斯行列表中s 3行各项,用上述方程式的系数,即8和24代替。
此时,劳斯行列表变为6s 1 8 20 5s 2 12 164s 2 12 16 3s 8 24 2s 6 16 1s 2.670s 16新劳斯行列表中第一列没有变号,所以没有根在右半平面。
对原点对称的根可解辅助方程求得。
令01612224=++s s得到2j s ±=和2j s ±=解毕。
例3-19 单位反馈控制系统的开环传递函数为)1)(1()(2+++=cs bs as s Ks G 试求: (1)位置误差系数,速度误差系数和加速度误差系数;(2)当参考输入为)(1t r ⨯,)(1t rt ⨯和)(12t rt ⨯时系统的稳态误差。
解 根据误差系数公式,有位置误差系数为∞=+++==→→)1)(1(lim)(lim 2cs bs as s Ks G K s s p 速度误差系数为Kcs bs as s Ks s sG K s s v =+++⋅==→→)1)(1(lim )(lim 20加速度误差系数为0)1)(1(lim )(lim 22020=+++⋅==→→cs bs as s Ks s G s K s s a对应于不同的参考输入信号,系统的稳态误差有所不同。
参考输入为)(1t r ⨯,即阶跃函数输入时系统的稳态误差为011=∞+=+=rK r e p ss参考输入为)(1t rt ⨯,即斜坡函数输入时系统的稳态误差为Kr K r e v ss ==参考输入为)(12t rt ⨯,即抛物线函数输入时系统的稳态误差为∞===22r K r e a ss 解毕。
例3-20 单位反馈控制系统的开环传递函数为)1)(1(10)(21s T s T s s G ++=输入信号为r (t )=A+ωt ,A 为常量,ω=0.5弧度/秒。
试求系统的稳态误差。
解 实际系统的输入信号,往往是阶跃函数、斜坡函数和抛物线函数等典型信号的组合。
此时,输入信号的一般形式可表示为221021)(t r t r r t r ++=系统的稳态误差,可应用叠加原理求出,即系统的稳态误差是各部分输入所引起的误差的总和。
所以,系统的稳态误差可按下式计算:av p ss K rK r K r e 2101+++=对于本例,系统的稳态误差为vp ss K K A e ω++=1本题给定的开环传递函数中只含一个积分环节,即系统为1型系统,所以∞=p K10)1)(1(10lim )(lim 210=++⋅==→→s T s T s s s sG K s s v系统的稳态误差为05.0105.0101011===+∞+=++=ωωωA K K A e v p ss解毕。
例3-21 控制系统的结构图如图3-37所示。
假设输入信号为r (t )=at (a 为任意常数)。
证明:通过适当地调节K i 的值,该系统对斜坡输入的响应的稳态误差能达到零。
解 系统的闭环传递函数为KTs s s K K s R s C i +++=)1()1()()( 即)()1()(2s R Ks Ts s K K s C i ⋅+++=因此)()()(22s R K s Ts s KK s Ts s C s R i ⋅⎥⎦⎤⎢⎣⎡++-+=- 当输入信号为r (t )=at 时,系统的稳态误差为K KK a Ks Ts KK Ts a K s Ts KK Ts a s a K s Ts s KK s Ts s e i i s i s i s ss )1()]1([lim )1(lim lim 20202220-=++-+=++-+=⋅⎥⎦⎤⎢⎣⎡++-+=→→→要使系统对斜坡输入的响应的稳态误差为零,即e ss =0,必须满足01=-i KK所以K K i /1=解毕。
例3-22 设单位负反馈系统开环传递函数为1)(+=Ts K K s G g p。
如果要求系统的位置稳态误差e ss =0,单位阶跃响应的超调量M p %=4.3%,试问K p 、K g 、T ,各参数之间应保持什么关系?解 开环传递函数R (C (图3-37 例3-21控制系统的结构图K i s)1(+Ts s K)2()1(/)1()(2n ng p gp s s Ts s T K K Ts s K K s G ξωω+=+=+=显然TK K gp n =2ω Tn 12=ξω 解得:24/1ξ=T K K g p由于要求%3.4%100%21/≤⨯=--ξξe M p故应有ξ ≥0.707。