1.坐标变换及矢量表示
- 格式:pdf
- 大小:144.84 KB
- 文档页数:1
0.1 简述工业机器人的定义,说明机器人的主要特征。
答:机器人是一种用于移动各种材料、零件、工具、或专用装置,通过可编程动作来执行种种任务并具有编程能力的多功能机械手。
1.机器人的动作结构具有类似于人或其他生物体某些器官(肢体、感官等)的功能。
2.机器人具有通用性,工作种类多样,动作程序灵活易变。
3.机器人具有不同程度的智能性,如记忆、感知、推理、决策、学习等。
4.机器人具有独立性,完整的机器人系统在工作中可以不依赖于人的干预。
0.2工业机器人与数控机床有什么区别?答:1.机器人的运动为开式运动链而数控机床为闭式运动链;2.工业机器人一般具有多关节,数控机床一般无关节且均为直角坐标系统;3.工业机器人是用于工业中各种作业的自动化机器而数控机床应用于冷加工。
4.机器人灵活性好,数控机床灵活性差。
0.5简述下面几个术语的含义:自有度、重复定位精度、工作范围、工作速度、承载能力。
答:自由度是机器人所具有的独立坐标运动的数目,不包括手爪(末端执行器)的开合自由度。
重复定位精度是关于精度的统计数据,指机器人重复到达某一确定位置准确的概率,是重复同一位置的范围,可以用各次不同位置平均值的偏差来表示。
工作范围是指机器人手臂末端或手腕中心所能到达的所有点的集合,也叫工作区域。
工作速度一般指最大工作速度,可以是指自由度上最大的稳定速度,也可以定义为手臂末端最大的合成速度(通常在技术参数中加以说明)。
承载能力是指机器人在工作范围内的任何位姿上所能承受的最大质量。
0.6什么叫冗余自由度机器人?答:从运动学的观点看,完成某一特定作业时具有多余自由度的机器人称为冗余自由度机器人。
0.7题0.7图所示为二自由度平面关节型机器人机械手,图中L1=2L2,关节的转角范围是0゜≤θ1≤180゜,-90゜≤θ2≤180゜,画出该机械手的工作范围(画图时可以设L2=3cm)。
1.1 点矢量v 为]00.3000.2000.10[T ,相对参考系作如下齐次坐标变换:A=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--10000.9000.1000.0000.00.3000.0866.0500.00.11000.0500.0866.0 写出变换后点矢量v 的表达式,并说明是什么性质的变换,写出旋转算子Rot 及平移算子Trans 。

第一章 矢量分析与场论实数域内任一代数即一个只有大小的量称之为标量,而一个既有大小又有方向特性的量称之为矢量。
无论是标量还是矢量,一旦被赋予物理单位,则成为一个具有物理意义的量即所谓的物理量。
物理量数值的无穷集合称为场。
如果这个物理量是标量,就称其为标量场;如果物理量是矢量就称这个场为矢量场。
场的一个重要属性是它占有一个空间,而且在该空间域内,除有限个点或表面外它是处处连续的。
如果场中各处物理量不随时间变化,则称该场为静态场,不然,则称为动态场或时变场。
本章从定义标量和矢量出发,讨论矢量在直角坐标系、圆柱坐标系和球坐标系三种坐标系中的表示法及其代数运算和相互关系;然后介绍了矢量及标量的微分和积分几及其性质;最后引入亥姆霍兹定理,它是矢量场共同性质的总结。
1.1 矢量及其代数运算一、标量和矢量电磁场中遇到的绝大多数物理量,能够容易地区分为标量(scalar )和矢量(vector)。
一个仅用大小就能够完整地描述的物理量称为标量,例如,电压、温度、时间、质量、电荷等。
实际上,所有实数都是标量。
一个有大小和方向的物理量称为矢量,电场、磁场、力、速度、力矩等都是矢量。
例如,矢量A 可以写成A a A = A Aa =(1-1-1)其中A 是矢量A 的大小,a 的大小等于1,代表矢量A 的方向。
一个大小为零的矢量称为空矢(null vector )或零矢(zero vector ),一个大小为1的矢量称为单位矢量(unit vector )。
在直角坐标系中,用单位矢量x a 、y a 和z a 表征矢量分别沿x 、y 和z 轴分量的方向。
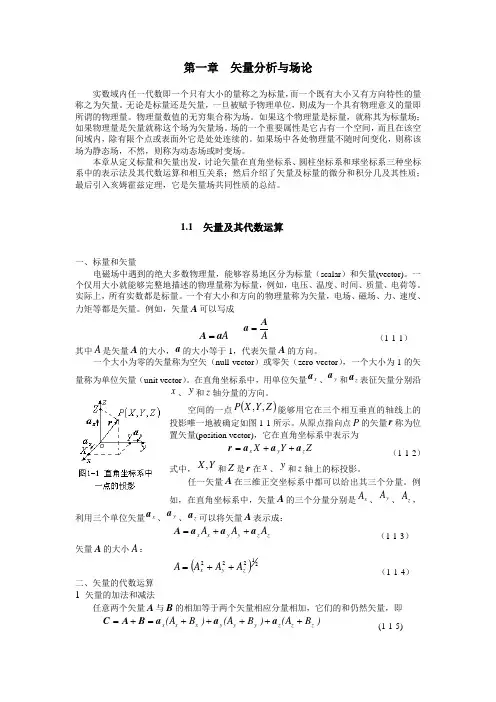
空间的一点()Z Y X P ,,能够用它在三个相互垂直的轴线上的投影唯一地被确定如图1-1所示。
从原点指向点P 的矢量r 称为位置矢量(position vector),它在直角坐标系中表示为Z Y X z y x a a a r ++= (1-1-2)式中,Y X ,和Z 是r 在x 、y 和z 轴上的标投影。
一个坐标系的坐标变换为另一种坐标系的坐标的法则。
由于交流异步电动机的电压、电流、磁通和电磁转矩各物理量之间是相互关联的强耦合,并且其转矩正比与主磁通与电流,而这两个物理量是随时间变化的函数,在异步电机数学模型中将出现两个变量的乘积项,因此,又为多变量,非线性系统(关键是有一个复杂的电感矩阵),这使得建立异步电动机的准确数学模型相当困难。
为了简化电机的数学模型,需从简化磁链入手。
解决的思路与基本分析:1.已知,三相( ABC )异步电动机的定子三相绕组空间上互差120度,且通以时间上互差120度的三相正弦交流电时,在空间上会建立一个角速度为ω的旋转磁1场。
又知,取空间上互相垂直的(α,β)两相绕组,且在绕组中通以互差90度的两相平衡交流电流时,也能建立与三相绕组等效的旋转磁场。
此时的电机数学模型有所简化。
2. 还知, 直流电机的磁链关系为:F---励磁绕组轴线---主磁通的方向,即轴线在d轴上,称为直轴(Direct axis)。
A---电枢绕组轴线---由于电枢绕组是旋转的,通过电刷馈入的直流电产生电枢磁动势,其轴线始终被限定在q轴,即与d轴成90度,称为交轴(Quadrature axis)。
由于q轴磁动势与d轴主磁通成正交,因此电枢磁通对主磁通影响甚微。
换言之,主磁通唯一地由励磁电流决定,由此建立的直流电机的数学模型十分简化。
如果能够将三项交流电机的物理模型等效的变换成类似的模型,分析和控制就变得大大简单了。
电机模型彼此等效的原则:不同坐标系下产生的磁动势(大小、旋转)完全一致。
关于旋转磁动势的认识:1) 产生旋转磁动势并不一定非要三相绕组不可。
结论是:除了单相电机之外,两相、三相或四相等任意对称(空间)的多相绕组,若通以平衡的多相电流,都可产生旋转磁动势。
根据这一道理,利用其在空间上互差90度的静止绕组,并通以时间上互差90度的平衡交流电流,同样可产生旋转磁场(或磁动势F),因而可等效代替三相绕组的作用。
第1章向量代数向量是一种重要的代数工具,同时具有很强的几何直观性。
利用向量可以很简洁地解决许多科学与工程技术中的问题,在力学、物理和工程技术中有着广泛的应用。
向量也是工程数学的一个重要基础,微分几何学是工程数学的一个重要分支和交叉学科。
为了奠定这方面的基础,本章将介绍向量的概念和它的基本运算。
1.1 向量的线性运算1.1.1 向量及其表示向量的概念来源于物理学。
很多物理量不仅有大小,还有方向,例如速度、位移、力等。
抛开它们的物理意义,只保留大小与方向两个要素,就抽象为数学中向量的概念。
定义1.1 既有大小,又有方向的量称为向量,或者叫矢量。
一般用有向线段表示一个向量,线段的长度表示它的大小,线段的方向表示它的方向。
以A为起点,B为终点的有向线段所表示的向量记为AB。
还常用黑体小写字母a,b,c等表示向量。
如果两个向量大小相等、方向相同,就称这两个向量相等。
由两个向量相等的定义可知,一个向量平行移动后,成为与原来向量相等的向量,因此向量的起点可以放在空间中的任意一点。
这种能任意平移的向量称为自由向量。
如果我们把一个向量的起点放在坐标的原点,则该向量常称为向径或矢径。
如果两个向量的大小相等而方向相反,则称这两个向量互为反向量或负向量。
向量的长度也称为向量的模。
向量AB的模用||表示(有些书上也有用双竖线||||表示的,本书一律使用单竖线表示),向量a的模用|a|表示。
模为1的向量称为单位向量。
模为零的向量称为零向量,记作0。
零向量的起点和终点是重合的,因此它没有确定的方向。
如果向量a与向量b 的方向相同或相反,就称它们平行,记作a // b。
如果向量a与向量b方向互相垂直,就称它们垂直或正交,记作a⊥b。
规定零向量与任何向量都平行且正交。
1.1.2 向量的线性运算将物理中速度或力的合成法则加以抽象,就得到向量加法的定义。
定义1.2 给定具有共同起点O 的两个向量a =,b =,则以OA ,OB 为邻边的平行四边形的对角线向量c = (图1.1) 就称为这两个向量的和,记作OC =OA +OB 或者 c = a + b 这种求和的方法称为平行四边形法则。
球坐标基矢与直角坐标基矢变换推导球坐标基矢与直角坐标基矢变换推导一、引言在物理学和工程学中,我们经常会遇到涉及坐标系和坐标变换的问题。
球坐标系和直角坐标系是两种常见的坐标系,它们之间的坐标变换是一个重要的内容。
本文将从球坐标基矢和直角坐标基矢入手,深入探讨它们之间的变换关系。
二、球坐标基矢和直角坐标基矢在球坐标系中,位置矢量可以用径向、极角和方位角来描述,对应的基矢分别为 r^、θ^、φ^。
在直角坐标系中,位置矢量可以用 x、y、z 来描述,对应的基矢分别为î、ĵ、k。
下面,我们将从数学角度出发,详细推导球坐标基矢与直角坐标基矢的变换关系。
三、球坐标基矢到直角坐标基矢的转化我们将球坐标系的基矢用直角坐标系的基矢表示,即 r^、θ^、φ^ → î、ĵ、k。
根据基矢的定义和坐标变换的定义,我们可以得到:1) r^ 的表达式r^ = sinθcosφî + sinθsinφĵ + cosθk2) θ^ 的表达式θ^ = cosθcosφî + cosθsinφĵ - sinθk3) φ^ 的表达式φ^ = -sinφî + cosφĵ接下来,我们将直角坐标系的基矢用球坐标系的基矢表示,即î、ĵ、k → r^、θ^、φ^。
根据基矢的定义和坐标变换的定义,我们可以得到:1) î 的表达式î = sinθcosφ r^ + cosθcosφθ^ - sinφφ^2) ĵ 的表达式ĵ = sinθsinφ r^ + cosθsinφθ^ + cosφφ^3) k 的表达式k = cosθ r^ - sinθθ^四、总结与回顾通过以上推导,我们得到了球坐标基矢与直角坐标基矢之间的变换关系。
这对于理解空间中物体的运动、力学问题以及电磁学问题等具有重要的意义。
在实际问题中,我们可以根据具体情况选择合适的坐标系和变换方法,以简化问题的求解过程。
为确保整个项目旋转坐标的统一性,先
统一各坐标的方向和位置
定义1:abc 坐标轴,以a 轴位起始,逆时针旋转,
120°为b 轴,240°为c 轴。
αβ坐标轴,α轴与a 轴重合,α轴逆时针旋转
90°为β轴。
QD 坐标轴,Q 轴与a 轴形成θ角,a 轴静止,
而Q 轴旋转,θ随Q 轴的旋转位置而变,D 轴为Q 轴
顺时针旋转90°所在位置。
定义1只是数学层面上的坐标设定还未牵涉到各物
理量!!
对于三相平衡的电压,其就是一个旋转矢量,假设其与Q 轴重合,而将三相电流投影到以电压矢量为Q 轴的旋转矢量上。
通过已知的 、 、 可以通过变换,将其转换为 、 。
如果电压矢量的角度 已知,则可以将
、 转
换到以电压矢量为Q 轴的QD 坐标轴上,如右图。
由图中可以看到:
定义2:投影在电压矢量上的电流分量 为有功
电流,垂直于电压矢量的电流分量 为无功分量。
通过如上定义,可以将三相电压或者电流分
量,在各坐标轴之间转换。
因此有:
23 1 12 120
√3 √3 cos sin sin
cos 23 1 1 10
√32 √32 cos sin sin cos。