龙驭球《结构力学Ⅱ》(第3版)笔记和课后习题(含考研真题)详解
- 格式:pdf
- 大小:24.67 MB
- 文档页数:185
第11章静定结构总论11.1复习笔记一、几何构造分析与受力分析之间的对偶关系1.从计算自由度W的力学含义和几何含义看对偶关系(1)W的几何含义W=各部件的自由度总数-全部约束数。
(2)W的力学含义W=各部件的平衡方程总数-未知力总数。
(3)根据W的数值,可对体系的静力特性得出下列结论①W>0,平衡方程个数大于未知力个数,体系不是都能维持平衡,体系为几何可变;②W<0,平衡方程个数小于未知力个数,体系如能维持平衡,体系有多余约束,是超静定的;③W=0,平衡方程个数等于未知力个数,考虑方程组的系数行列式D当D≠0,方程组有唯一解,体系几何不变且无多余约束;当D=0,方程组无解或有无穷多解,体系几何可变且有多余约束。
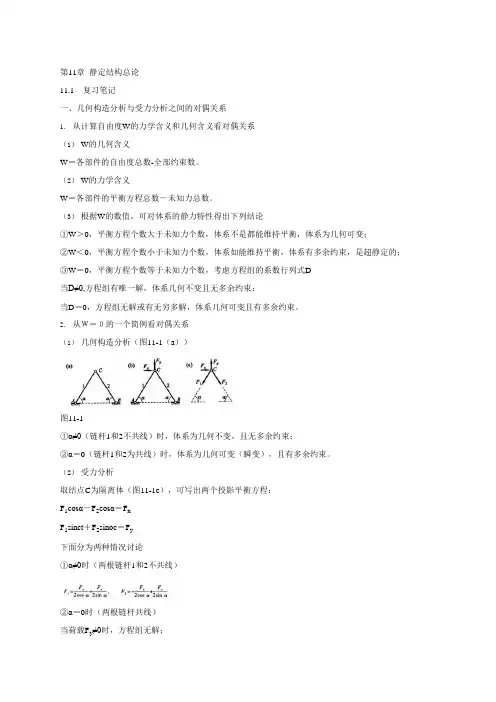
2.从W=0的一个简例看对偶关系(1)几何构造分析(图11-1(a))图11-1①α≠0(链杆1和2不共线)时,体系为几何不变,且无多余约束;②α=0(链杆1和2为共线)时,体系为几何可变(瞬变),且有多余约束。
(2)受力分析取结点C为隔离体(图11-1c),可写出两个投影平衡方程:F1cosα-F2cosα=F xF1sinct+F2sinoc=F y下面分为两种情况讨论①α≠0时(两根链杆1和2不共线)②α=0时(两根链杆共线)当荷载F y≠0时,方程组无解;如果考虑F y=0而只有水平荷载F x作用的特殊情况,此时解为:F1=F2+F x=任意值。
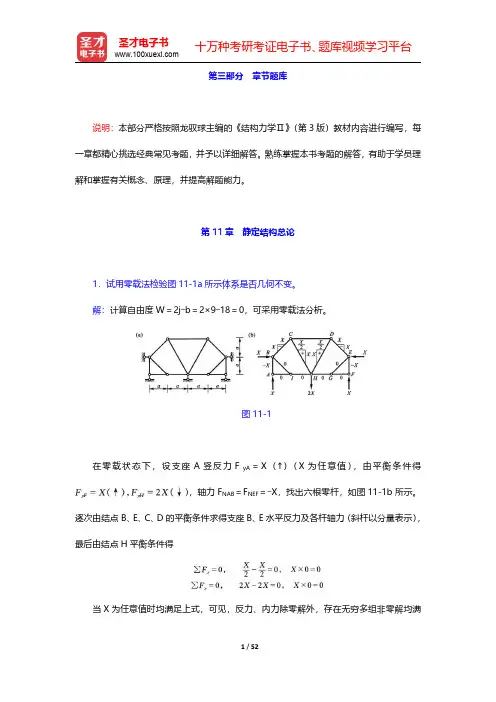
二、零载法1.零载法的作法表述对于W=0的体系,如果是几何不变的,则在荷载为零的情况下,它的全部内力都为零;反之,如果是几何可变的,则在荷载为零的情况下,他的某些内力可不为零。
2.零载法适用体系零载法是针对W=0的体系,用静力法来研究几何构造问题,用平衡方程的解的唯一性来检验其几何不变性的方法。
3.从虚功原理角度看零载法由于载荷为零,因此虚功方程左边只有一项Fx•△x=0(1)与F x相应的约束是非多余约束,△≠0,解得F=0;(2)与F x相应的约束是多余约束,△=0,则F等于任意值。
概念题1.1结构动力计算和静力计算的主要区别是什么?答:主要区别表现在:(1)在动力分析中要汁入惯性力,静力分析中无惯性力:(2)在动力分析中,结构的内力、位移等是时间的函数,静力分析中则是不随时间变化的量;(3)动力分析方法常和荷载类型有关,而静力分析方法一般和荷载类型无关。
1.2什么是动力自由度,确建体系动力自由度的目的是什么?答:确左体系在振动过程中任一时刻体系全部质量位苣或变形形态所需要的独立参数的个数,称为体系的动力自由度(质点处的基本位移未知量)。
确泄动力自由度的目的是:(1)根据自由度的数目确立所需建立的方程个数(运动方程数=自由度数),自由度不同所用的分析方法也不同:(2)因为结构的动力响应(动力内力和动位移)和结构的动力特性有密切关系,而动力特性又和质量的可能位世有关。
1.3结构动力自由度和体系几何分析中的自由度有何区别?答:二者的区别是:几何组成分析中的自由度是确泄刚体系位置所需独立参数的数目,分析的目的是要确眾体系能否发生刚体运动。
结构动力分析自由度是确定结构上各质量位置所需的独立参数数目,分析的目的是要确能结构振动形状。
1.4结构的动力特性一般指什么?答:结构的动力特性是指:频率(周期)、振型和阻尼。
动力特性是结构固有的,这是因为它们是由体系的基本参数(质量、刚度)所确左的、表征结构动力响应特性的量。
动力特性不同,在振动中的响应特点亦不同。
1.5什么是阻尼、阻尼力,产生阻尼的原因一般有哪些?什么是等效粘滞阻尼?答:振动过程的能量耗散称为阻尼。
产生阻尼的原因主要有:材料的内摩擦、构件间接触而的摩擦、介质的阻力等等。
当然,也包括结构中安装的各种阻尼器、耗能器。
阻尼力是根据所假设的阻尼理论作用于质量上用于代替能量耗散的一种假想力。
粘滞阻尼理论假定阻尼力和质量的速度成比例。
粘滞阻尼理论的优点是便于求解,但其缺点是和往往实际不符,为扬长避短,按能量等效原则将实际的阻尼耗能换算成粘滞阻尼理论的相关参数,这种阻尼假设称为等效粘滞阻尼。
第16章结构的极限荷载16.1 复习笔记一、概述1.弹性设计方法以许用应力为依据确定截面的尺寸或进行强度验算的作法。
缺点:没有考虑材料的塑性特性,不经济。
2.塑性设计方法考虑材料塑性变形,确定结构破坏时所能承担的荷载,以此为依据得到容许荷载的方法。
3.基本假设(1)材料是理想的弹塑性材料;(2)满足平面截面假定;(3)忽略剪力和轴力对极限弯矩的影响。
二、极限弯矩、塑性铰和极限状态1.极限弯矩和极限状态以图16-1理想弹塑性材料的矩形截面梁处于纯弯矩状态为例:图16-1图(b ):弹性阶段,弯矩M 为:——屈服弯矩;图(c ):弹塑性阶段,部分为弹性区;图(d ):塑性流动阶段,。
弯矩M 为:——极限弯矩。
2.塑性铰塑性铰:弯矩达到极限弯矩时的截面。
塑性铰的特点(与机械铰的区别):(1)普通铰不能承受弯矩,塑性铰能够承受弯矩; (2)普通铰双向转动,塑性铰单向转动; (3)卸载时,机械铰不消失,当时,塑性铰消失;(4)随荷载分布而出现于不同截面。
3.破坏机构当结构在荷载作用下形成足够多的塑性铰时,结构(整体或局部)就会变成几何可变体系。
称这一可变体系为破坏机构,简称机构。
u qq注意事项:(1)不同结构在荷载作用下,成为机构,所需塑性铰的数目不同; (2)不同结构,只要材料、截面积、截面形状相同,极限弯矩一定相同;(3)材料、截面积、截面形状相同的不同结构,不一定相同。
三、超静定梁的极限荷载1.超静定梁的破坏过程和极限荷载的特点静定梁:只要一个截面出现塑性铰,梁就成为机构,丧失承载力以致破坏。
超静定梁:具有多余约束,必须出现足够多的塑性铰,才能使其成为机构,丧失承载力以致破坏。
以图16-2等截面梁来说明。
图16-2图(b )为弹性阶段()的M 图,A 截面弯矩最大;后,塑性区在Aσ=⋅u s u M W u q附近形成并扩大,在A截面形成第一个塑性铰,M图如(c)图;继续增加,荷载增量引起的弯矩增量图相应于简支梁的弯矩图,如图(d),第二个塑性铰出现在C截面,梁变成机构。
结构力学2课后概念题答案(龙驭球)概念题1.1 结构动力计算与静力计算的主要区别是什么?答:主要区别表现在:(1) 在动力分析中要计入惯性力,静力分析中无惯性力;(2) 在动力分析中,结构的内力、位移等是时间的函数,静力分析中则是不随时间变化的量;(3) 动力分析方法常与荷载类型有关,而静力分析方法一般与荷载类型无关。
1.2 什么是动力自由度,确定体系动力自由度的目的是什么?答:确定体系在振动过程中任一时刻体系全部质量位置或变形形态所需要的独立参数的个数,称为体系的动力自由度(质点处的基本位移未知量)。
确定动力自由度的目的是:(1) 根据自由度的数目确定所需建立的方程个数(运动方程数=自由度数),自由度不同所用的分析方法也不同;(2) 因为结构的动力响应(动力内力和动位移)与结构的动力特性有密切关系,而动力特性又与质量的可能位置有关。
1.3 结构动力自由度与体系几何分析中的自由粘滞阻尼理论的优点是便于求解,但其缺点是与往往实际不符,为扬长避短,按能量等效原则将实际的阻尼耗能换算成粘滞阻尼理论的相关参数,这种阻尼假设称为等效粘滞阻尼。
1.6 采用集中质量法、广义位移法(坐标法)和有限元法都可使无限自由度体系简化为有限自由度体系,它们采用的手法有何不同?答:集中质量法:将结构的分布质量按一定规则集中到结构的某个或某些位置上,认为其他地方没有质量。
质量集中后,结构杆件仍具有可变形性质,称为“无重杆”。
广义坐标法:在数学中常采用级数展开法求解微分方程,在结构动力分析中,也可采用相同的方法求解,这就是广义坐标法的理论依据。
所假设的形状曲线数目代表在这个理想化形式中所考虑的自由度个数。
考虑了质点间均匀分布质量的影响(形状函数),一般来说,对于一个给定自由度数目的动力分析,用理想化的形状函数法比用集中质量法更为精确。
有限元法:有限元法可以看成是广义坐标法的一种特殊的应用。
一般的广义坐标中,广义坐标是形函数的幅值,有时没有明确的物理意义,并且在广义坐标中,形状函数是针对整个结构定义的。