基于Matlab的客车转向侧翻稳定性分析(精)
- 格式:doc
- 大小:16.50 KB
- 文档页数:3

10.16638/ki.1671-7988.2021.03.010基于MATLAB/Simulink的车辆转向稳定性的仿真研究马园杰,周旭(湖北汽车工业学院机械工程学院,湖北十堰442000)摘要:汽车的操纵稳定性是衡量汽车安全性最基本的指标之一,影响汽车行驶稳定性的基本因素主要有横摆角速度与质心侧偏角,将汽车简化为二自由度模型,建立关于横摆角速度与质心侧偏角的转向微分方程。
基于MA TLAB/Simulink软件建立仿真模型,对前轮转向与四轮转向典型的二自由度汽车模型进行仿真分析。
对比两轮转向和四轮转向的稳定性。
且四轮转向采用线控转向,将线控转向系统与四轮转向系统的优点结合起来,观察采用线控对汽车稳定性的影响。
关键词:二轮转向;四轮转向;横摆角速度;质心侧偏角中图分类号:TP391.9;U463.41 文献标示码:A 文章编号:1671-7988(2021)03-34-03 Simulation Research on Vehicle steering stability based on MATLAB/SimulinkMa Yuanjie, Zhou Xu(Department of Mechanical Engineering, Hubei University of Automotive Technology, Hubei Shiyan 442000)Abstract:Vehicle handing stability is the index to measure automobile safety. Yaw velocity and side slip angle are the basic factors that affect the vehicle handing stability. Simplify the car to two degree of freedom model. This paper establi -shed the differential equations of Yaw velocity and side slip angle. Using the MA TLAB/Simulinl to create the simulation model and analyze the stability of Vehicle steering system. Combine the advantage of the wire steering system with four wheel steering , Observe its effect on stability.Keywords: Two wheel steering; Four wheel steering; Yaw velocity; Side slip angleCLC NO.: TP391.9; U463.41 Document Code: A Article ID: 1671-7988(2021)03-34-03前言随着人们对现代汽车安全性及操纵稳定性的关注,汽车行驶稳定性越来越成为人们备受关注的焦点。

客车动态抗侧翻稳定性试验仿真研究的开题报告一、选题背景和意义近年来,交通事故频发,其中客车侧翻事故居高发地位。
客车侧翻事故的危害程度极高,不仅能造成严重财产损失,还会导致人员伤亡甚至死亡,严重影响着社会的安全和稳定。
因此,对客车动态抗侧翻的稳定性进行研究,寻找有效的预防和控制措施,对减少客车侧翻事故和减少交通事故的发生意义重大。
本文旨在对客车动态抗侧翻稳定性进行研究,在仿真实验中模拟客车侧翻情况,分析影响客车侧翻的因素,探索出对客车侧翻事故有效的预防控制措施,提高交通系统的安全性,为解决当前客车侧翻事故问题提供一定的理论基础和技术支持。
二、研究内容和研究目标1.研究内容(1)客车动态系统稳定性分析使用MATLAB/Simulink软件建立客车运动学模型,实现对客车侧翻时的稳定性分析。
(2)客车侧翻试验仿真建立客车侧翻试验仿真模型,对客车在不同路况、不同车速、不同载重条件下的侧翻稳定性进行仿真分析。
(3)预防和控制措施研究根据试验仿真结果,分析客车运行过程中的侧翻风险因素,探索对客车侧翻事故有效的预防和控制措施。
2.研究目标通过对客车动态抗侧翻稳定性试验仿真的研究和分析,达到以下目标:(1)了解客车动力学稳定性的变化规律,分析影响客车侧翻的因素。
(2)建立客车侧翻试验仿真模型,模拟客车在不同路况、不同车速、不同载重条件下的侧翻情况,探索客车侧翻的特征和规律。
(3)寻找有效的预防和控制措施,以降低客车侧翻事故的发生率,提高客车的安全性和稳定性。
三、研究方法1.客车动力学稳定性分析方法本文采用MATLAB/Simulink软件建立客车运动学模型,分析客车运动过程中的各种力学因素,探讨客车动态系统的稳定性变化规律。
2.客车侧翻试验仿真方法本文基于ADAMS软件建立客车侧翻试验仿真模型,模拟客车在不同路况、不同车速、不同载重条件下的运动情况,分析影响客车侧翻的因素,探索客车侧翻的特征和规律。
3.预防和控制措施研究方法本文通过客车侧翻试验仿真分析,分析客车运行过程中的侧翻风险因素,探索对客车侧翻事故有效的预防和控制措施,为提高客车的安全性和稳定性提供理论支持。
基于matlab的大客车操纵稳定性建模与研究近年来,大客车的操纵稳定性和安全性问题日益受到关注,针对这一问题本文提出了一种基于Matlab的大客车操纵稳定性建模与研究的方法。
首先,根据大客车的物理性能,构建了一个多模型的Matlab 仿真程序,其中包括大客车的物理运动模型和车辆操纵系统。
然后,对仿真程序进行了系统分析,探讨了大客车操纵稳定性的相关因素,以及操纵精度如何影响操纵稳定性。
最后,利用仿真实验,验证了Matlab仿真程序的准确性。
结果表明,基于Matlab的大客车操纵稳定性建模与研究方法是可行的。
1 Introduction随着交通运输业的发展,大客车在日常交通环境中发挥着重要的作用,但是它的操纵稳定性和安全性问题一直困扰着交通安全研究者。
因此,研究大客车的操纵稳定性是交通安全领域的一个重要课题。
为了解决这一问题,本文采用基于Matlab的建模和仿真方法,对大客车的操纵稳定性进行了研究。
2 Theory2.1 Model根据大客车的物理性能,构造了一个多状态的Matlab仿真程序,包括大客车的物理运动模型和操纵系统模型。
其中,大客车的物理运动模型由线性动力学方程组构成,可以描述大客车在水平面上的运动;操纵系统模型是一个简单的PID控制器,用于模拟大客车操纵过程。
2.2 Analysis通过对仿真程序进行系统分析,探讨了大客车操纵稳定性的相关因素,以及操纵精度如何影响操纵稳定性。
3 Experiment仿真实验用于验证模型的准确性以及车辆操纵稳定性。
仿真实验包括假想试验和实际试验。
在假想试验中,通过改变控制精度来检查大客车操纵稳定性的变化规律。
在实际试验中,使用实际数据来验证仿真结果的准确性。
4 Conclusion本文提出了一种基于Matlab的大客车操纵稳定性建模与研究的方法。
仿真实验表明,Matlab仿真可以准确描述大客车的操纵特性,揭示大客车操纵稳定性的内在规律,提供了有效的操纵稳定性分析技术。
基于MATLAB的车辆两自由度操纵稳定性模型及分析汽车操纵稳定性是汽车高速安全行驶的生命线,是汽车主动安全性的重要因素之一;汽车操纵稳定性一直汽车整车性能研究领域的重要课题。
本文采用MATLAB仿真建立了汽车二自由度动力学模型,通过仿真分析了不同车速、不同质量和不同侧偏刚度对汽车操纵稳定性的影响。
研究表明,降低汽车行驶速度,增加前后轮侧偏刚度和减小汽车质量可以减小质心侧偏角,使固有圆频率增加降低行驶车速还可以使阻尼比增加,超调量及稳定时间减少。
车辆操纵稳定性评价主要有客观评价和主观评价俩种方法。
客观评价是通过标准实验得到汽车状态量,再计算汽车操纵稳定性的评价指标,这可通过实车实验和模拟仿真完成,在车辆开发初期可通过车辆动力仿真进行车辆操纵稳定性研究。
1二自由度汽车模为了便于掌握操纵稳定性的基本特性,对汽车简化为线性二自由度的汽车模型,忽略转向系统的影响,直接一前轮转角作为输入;忽略悬架的作用,认为汽车车厢只作用于地面的平面运动。
2 运动学分析确定汽车质心的(绝对)加速度在车辆坐标系的分量a a 和a a 。
Ox 与Oy 为车辆坐标系的纵轴与横轴。
质心速度a 1与t 时刻在Ox 轴上的分量为u ,在oy 轴上的分量为v 。
沿Ox 轴速度分量的变化为:()()cos sin cos cos sin sin u u u v v u u u v v θθθθθθ+∆∆--+∆∆=∆+∆∆---∆∆考虑到∆θ很小并忽略二阶微量,上式变成:除以∆t并取极限,便是汽车质心绝对加速度在车辆坐标系。
沿Ox 轴速度分量的变化为:u x r d d v u v dt dt a θω=-=-同理,汽车质心绝对加速度沿横轴oy 上的分量为:y rv u a ω=+二自由度动力学方程二自由度汽车受到的外力沿y 轴方向的合力与绕质心的力矩和为:1212cos a cos YY Y ZY Y b F F FM F Fδδ=+=-∑∑式中,a a 1,a a 2为地面对前后轮的侧向反作用力;δ为前轮转角。

基于matlab的转向侧倾稳定性分析杜鹏;谢祥东;郭惊宇;韩龙;田江【摘要】主要对转向行驶时车辆的侧倾稳定性进行了分析,建立了转向数学模型,结合某车辆整车参数和路面附着条件进行了matlab仿真,得出了通过提高车辆抗侧倾性能来提高车辆行驶稳定性的方法.【期刊名称】《现代制造技术与装备》【年(卷),期】2019(000)008【总页数】2页(P66-67)【关键词】转向;侧倾;matlab【作者】杜鹏;谢祥东;郭惊宇;韩龙;田江【作者单位】陕西重型车辆有限公司,西安 710200;陕西重型车辆有限公司,西安710200;陕西重型车辆有限公司,西安 710200;陕西重型车辆有限公司,西安710200;陕西重型车辆有限公司,西安 710200【正文语种】中文侧倾是指车辆在行驶过程中,绕坐标纵轴转动900或更大角度产生的一种极其危险的侧向运动。
车辆侧倾可分为两类,一种是曲线运动引起的侧倾;另一种是绊倒侧倾。
曲线运动引起的侧倾是指车辆在道路上行驶时,由于车辆侧向加速度超过一定限值,内侧车轮垂直反力为零而引起的侧倾。
车辆车身和质量比轿车等小型车大得多,而且其地板一般都比较高,在转向侧倾事故中,车身将向某一侧倾倒,车体结构变形可能侵入车厢内部,对驾驶员和乘客造成伤害。
而侧倾试验是较难实施,且成本较大,本文通过建立车辆侧倾数学模型,在Matlab中进行仿真来分析影响车辆转向行驶稳定性的因素,并通过设计保证车辆参数合理性。
1 车辆转向侧倾模型车辆在行驶过程中遇到弯道或避开障碍物时需要紧急转向,转向时车辆的质心绕转向瞬心C作圆周运动,如图1所示。
图1 车辆转向示意图在图1中,Rr为转向瞬心C到后内侧车轮的转向半径;Rf为转向瞬心C到前内侧车轮的转向半径;θ为车辆转向轮转过的角度;L为车辆的轴距;a为车辆质心到前桥距离;b为车辆质心到到后桥距离。
相互之间的关系如式(1)所示。
2 影响车辆侧倾稳定性的因素分析影响车辆侧倾稳定性的因素可分为两大类:一种是与整车设计参数有关;另一种与车辆行驶状态有关,如行驶速度、转弯半径以及路面附着系数等。
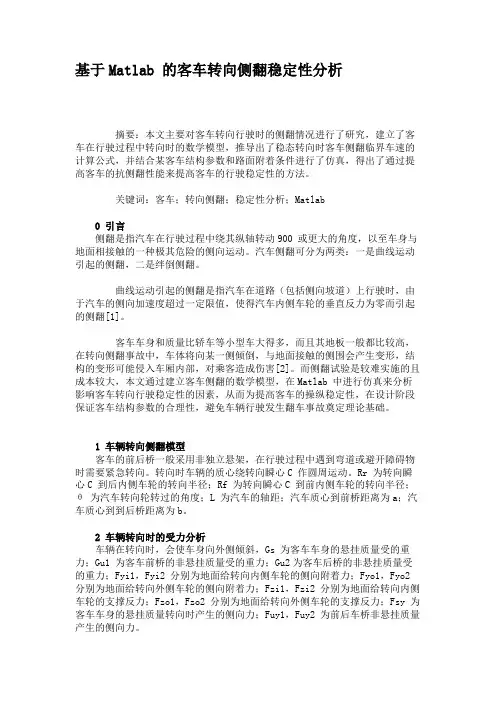
基于Matlab 的客车转向侧翻稳定性分析摘要:本文主要对客车转向行驶时的侧翻情况进行了研究,建立了客车在行驶过程中转向时的数学模型,推导出了稳态转向时客车侧翻临界车速的计算公式,并结合某客车结构参数和路面附着条件进行了仿真,得出了通过提高客车的抗侧翻性能来提高客车的行驶稳定性的方法。
关键词:客车;转向侧翻;稳定性分析;Matlab0 引言侧翻是指汽车在行驶过程中绕其纵轴转动900 或更大的角度,以至车身与地面相接触的一种极其危险的侧向运动。
汽车侧翻可分为两类:一是曲线运动引起的侧翻,二是绊倒侧翻。
曲线运动引起的侧翻是指汽车在道路(包括侧向坡道)上行驶时,由于汽车的侧向加速度超过一定限值,使得汽车内侧车轮的垂直反力为零而引起的侧翻[1]。
客车车身和质量比轿车等小型车大得多,而且其地板一般都比较高,在转向侧翻事故中,车体将向某一侧倾倒,与地面接触的侧围会产生变形,结构的变形可能侵入车厢内部,对乘客造成伤害[2]。
而侧翻试验是较难实施的且成本较大,本文通过建立客车侧翻的数学模型,在Matlab 中进行仿真来分析影响客车转向行驶稳定性的因素,从而为提高客车的操纵稳定性,在设计阶段保证客车结构参数的合理性,避免车辆行驶发生翻车事故奠定理论基础。
1 车辆转向侧翻模型客车的前后桥一般采用非独立悬架,在行驶过程中遇到弯道或避开障碍物时需要紧急转向。
转向时车辆的质心绕转向瞬心C 作圆周运动。
Rr 为转向瞬心C 到后内侧车轮的转向半径;Rf 为转向瞬心C 到前内侧车轮的转向半径;θ为汽车转向轮转过的角度;L 为汽车的轴距;汽车质心到前桥距离为a;汽车质心到到后桥距离为b。
2 车辆转向时的受力分析车辆在转向时,会使车身向外侧倾斜,Gs 为客车车身的悬挂质量受的重力;Gu1 为客车前桥的非悬挂质量受的重力;Gu2为客车后桥的非悬挂质量受的重力;Fyi1,Fyi2 分别为地面给转向内侧车轮的侧向附着力;Fyo1,Fyo2 分别为地面给转向外侧车轮的侧向附着力;Fzi1,Fzi2 分别为地面给转向内侧车轮的支撑反力;Fzo1,Fzo2 分别为地面给转向外侧车轮的支撑反力;Fsy 为客车车身的悬挂质量转向时产生的侧向力;Fuy1,Fuy2 为前后车桥非悬挂质量产生的侧向力。

基于MATLAB仿真的车辆转向稳定性控制策略
李显生;霍娜;于海波;门玉琢;李跃伟
【期刊名称】《系统仿真学报》
【年(卷),期】2008(20)11
【摘要】为研究某半主动悬架车辆的转向稳定性,提出了悬架阻尼BP神经网络PID控制技术。
以理想的横摆角速度和实际的横摆角速度误差作为控制目标,对车辆实行转向横摆稳定性闭环控制。
通过控制车辆的横摆角速度来分析悬架阻尼变化对车轮垂直载荷及侧倾的影响,针对单移线转向和阶跃转向两种典型工况,应用MATLAB软件进行了仿真。
结果表明,在高附着路面上,可以通过控制悬架阻尼来控制车辆的横摆和侧偏运动,当前悬架阻尼增加后悬架阻尼减小时,车辆前后轴左右车轮的载荷转移明显减小,从而能有效抑制车辆的过多转向特性,为改善操纵稳定性提供一种新控制方法。
【总页数】5页(P2982-2986)
【作者】李显生;霍娜;于海波;门玉琢;李跃伟
【作者单位】吉林大学交通学院;吉林大学汽车工程学院
【正文语种】中文
【中图分类】TP391.9
【相关文献】
1.车辆转向稳定性控制策略联合仿真
2.基于BP神经网络的车辆转向稳定性控制策略及仿真
3.基于MATLAB/Simulink的车辆转向稳定性的仿真研究
4.基于Matlab
的四轮转向车辆操纵稳定性仿真研究5.基于Matlab/Simulink的四轮转向车辆操纵稳定性仿真
因版权原因,仅展示原文概要,查看原文内容请购买。
基于MATLAB的汽车操纵稳定性分析
包凡彪
【期刊名称】《西部交通科技》
【年(卷),期】2011(000)011
【摘要】文章利用MATLAB软件强大的计算能力和绘图功能,通过建立汽车操纵
稳定性分析模型,对汽车稳态响应和前轮角阶跃输入下的瞬态响应进行了求解分析。
结果表明:轮胎的侧偏刚度(绝对值)越大,汽车的操作稳定性就越好;横摆角速度
的固有频率越高越好;稳定性因素K应小于0,使汽车有适度的不足转向,有利于行车安全。
【总页数】5页(P75-79)
【作者】包凡彪
【作者单位】北京理工大学珠海学院,广东珠海519088
【正文语种】中文
【中图分类】U461.6
【相关文献】
1.基于Matlab/Simulink的四轮转向汽车操纵稳定性分析 [J], 郭子蒙;辛青青;张
万枝;杨兴;隋军鹏
2.基于ADAMS的电动汽车操纵稳定性分析 [J], 吕林; 王吉忠; 尘帅
3.基于ADAMS的电动汽车操纵稳定性分析 [J], 吕林; 王吉忠; 尘帅
4.基于频率响应特性的汽车操纵稳定性分析 [J], 张丽霞;郑超艺;潘福全;张文彩;刘
家琪
5.基于MATLAB/SIMULINK的车辆操纵稳定性分析 [J], 张泽民;王国林;周孔亢因版权原因,仅展示原文概要,查看原文内容请购买。
10.16638/ki.1671-7988.2018.13.011某客车急转弯侧翻稳定性分析赵治军,张天宇,黄喆,吴岩(长安大学汽车学院,陕西西安710064)摘要:随着道路交通的快速发展,公路旅客运输蓬勃发展总体客运量年年攀升。
然而,有关客车的重、特大事故屡见不鲜,给人民群众的生命和财产安全带来了相当大的损失。
其中,客车侧翻事故无论在数量上还是人员伤亡和经济损失的程度上都已成为仅次于碰撞的第二大道路交通事故形态。
文章以一款8m客车为基础,通过Trucksim 软件建立了客车动力学模型,进行了急转弯稳定性虚拟试验。
通过鱼钩试验(Fish-hook)分析了方向盘转角与客车侧向加速度、轮胎垂直反力的关系,探讨了侧翻倾向性。
通过单因素的仿真试验,揭示了方向盘最大转角、方向盘角速度对8m客车侧翻倾向性的影响,表明方向盘转角对侧翻倾向性影响最为明显,方向盘角速度也有较大的影响。
该研究结果对于8m客车设计改进、风险预测和减少交通事故的发生具有科学意义。
关键词:客车侧翻;鱼钩试验;侧翻倾向性;Trucksim中图分类号:U467 文献标识码:B 文章编号:1671-7988(2018)13-36-03Analysis of Rollover Stability of a Passenger CarZhao Zhijun, Zhang Tianyu, Huang Zhe, Wu Yan( Automotive College of Chang'an University, Shaanxi Xi'an 710064 )Abstract: With the rapid development of road traffic, Highway passenger transport is booming and overall passenger volume rises year after year. However, there have been lots of bus accidents and those accidents lead to the considerable losses of people's lives and property. Among them, the bus rollover accident in terms of the number or casualties have become second only to the collision of the bus. A dynamics model was developed to analyze 8m-bus dynamics and sharp turn stability. The relationships between the steering wheel angle, lateral acceleration, and tire vertical force were obtained using the fish-hook virtual tests. The influences of bus structure, traffic conditions, and external conditions on the rollover tendency were also analyzed in single-factor experiments. The results show that the the max angle is one of the most important parameters with the vehicle 's center of gravity and other parameters also having some influence on the rollover tendency. These results can be used to improve 8m-bus redesigns, improve risk prediction, and reduce the incidence of traffic accidents.Keywords: Rollover; Fish-hook; Rollover tendency; TrucksimCLC NO.: U467 Document Code: B Article ID: 1671-7988(2018)13-36-03前言客车的翻车事故虽然发生率虽不如正撞、尾撞高,但容易造成群死群伤,产生了严重的社会危害。
摘要铰接式客车作为BRT快速公交系统的重要车型,具有载客量大、运营成本低的优点,近年来成为了研究热点。
铰接式客车由主车、副车及铰接装置组成。
由于结构复杂,铰接式客车的速度得到了很大限制。
为了解决铰接式客车在高速行驶时的稳定性问题,本文利用直接横摆力矩控制方法对铰接式客车进行了稳定性控制策略的研究。
本文首先分析了铰接式客车在稳态转弯时,可能发生的动力锁死问题,并基于此设计了以最优主副车夹角为目标函数的优化模型,优化模型的约束方程包括主、副车车身的几何参数限制以及国家标准对铰接式客车转弯通道宽度的限制标准。
优化后,主副车夹角显著降低,提高了铰接式客车稳态转弯能力。
针对铰接式客车高速转弯时的瞬态响应特性,本文建立了铰接式客车包含主车模型、副车模型、饺接装置模型在内的十五自由度整车模型,并仿真分析了铰接式客车在三种方向盘转角输入时,不同车速下,主、副车的运动响应。
仿真结果表明,方向盘转角较小时,铰接式客车在不同车速下都有良好的转向性能,而当方向盘转角较大且车速较高时,铰接式客车出现转向失稳的危险工况。
为了提高铰接式客车高速工况下的转向能力,对其施加直接横摆力偶矩控制,直接横摆力偶矩通过主、副车制动器差动制动产生。
通过理论分析,确定了直接横摆力偶矩的控制目标为主车横摆角速度、质心侧偏角和副车质心侧偏角,并推导了其理想模型。
同时设计了以副车质心侧偏角归零为控制目标的PID控制器和主车质心侧偏角及横摆角速度跟随其理想模型的PID控制器和模糊控制器。
控制结果表明,当副车控制方式为PID控制且主车控制方式为PID模糊联合控制时,铰接式客车的运动响应品质最优。
关键词:汽车工程;铰接式客车;直接横摆力矩;稳定性;车辆动力学AbstractAs an important bus model of BRT system, articulated bus has attracted a mass of attention for its advantages such as large capacity and low operating costs. The articulated bus consists of main bus, sub-bus and articulated devices. Due to the complex structure, the speed of articulated bus has been very limited. In order to solve the problem of stability of articulated bus when driving at high speed, the stability control strategy of the articulated bus has been studyed with the direct yaw moment control method being used in this paper.In this paper, the potential lock-up problem of articulated bus when turning in steady-state was analyzed initially. Optimization model was designed based on this, with the angle between main bus and sub-bus as the objective function. The constraint equations of the optimization model included the geometric parameters of the main and auxiliary vehicle body and based on national standard of the limits of the width of the articulated bus turning channel. After optimization, the angle between main bus and vice bus was significantly reduced,and the turning ability of articulated bus had been improved.To obtain the transient response characteristics of articulated bus during high-speed turning, a 15-DOF vehicle model of articulated bus including the main vehicle model, deputy vehicle model and dumpling device model was established in this paper, and then simulated the motion response of the main and sub vehicles under the different speed of the articulated bus when the three steering wheel angles are input.Simulation results show that when the steering wheel angle is small, articulated bus has good steering performance at different speeds, while the steering wheel angle is large and the speed is high, articulated bus has potential of instability.In order to improve the steering capacity of articulated passenger bus when driving at high speed, the direct yaw moment control was applied, and the direct yaw moment is generated by the brake differential of the main and sub bus. Through theoretical analysis, the control target of the direct yaw moment is determined as the yaw velocity of main bus, side slip angle of main bus and sub-bus, and the ideal model was deduced based on it. Meanwhile, the PID controller was designed, which targets the side slip angle of the sub vehicle was zero ,and PID controller and fuzzy controller are designed to make the yaw angular velocity and side slip angle of the main bus follow the ideal model .The control results show that when the sub-bus was controlled by PID control and the main bus was controlled by PID fuzzy joint control, the motion response quality of the articulated bus is the best.Keywords: Automotive Engineering; Articulated bus; Direct yaw moment; Stability; Vehicle dynamics目录摘要 (I)Abstract (II)第一章绪论 (1)1.1 课题背景及意义 (1)1.2 国内外研究现状 (2)1.2.1 铰接式客车的发展现状 (2)1.2.2 国内外关于汽车操纵稳定性相关研究历史及现状 (3)1.2.3 车辆操纵稳定性控制方法 (6)1.3 主要研究目的 (10)1.4 主要研究内容 (10)第二章铰接式客车车身参数的优化设计 (12)2.1 铰接式客车转弯特性分析 (12)2.2 优化设计及分析 (14)2.2.1 设计变量及优化设计目标函数的确定 (14)2.2.2 约束条件的确定 (16)2.3 优化设计程序实现 (18)2.3.1 优化设计结果 (18)2.3.2 讨论和分析 (20)2.4 本章小结 (21)第三章铰接式BRT客车动力学模型及仿真分析 (22)3.1 引言 (22)3.2 轮胎运动坐标系 (22)3.3 轮胎模型 (23)3.3.1 轮胎模型介绍 (23)3.3.2 魔术公式轮胎模型 (24)3.4 主车动力学模型 (29)3.4.1 主车运动方程的推导 (29)3.4.2 主车轮胎垂直载荷的计算 (34)3.4.3 主车轮胎滑移率及阿克曼转向角理论 (35)3.5 副车动力学模型 (37)3.6 铰接装置的力学模型 (39)3.7 模型仿真及分析 (40)3.8 本章小结 (44)第四章铰接式客车稳定性控制策略的研究 (45)4.1 横摆角速速与汽车行驶稳定性关系 (45)4.2 质心侧偏角与汽车稳定性的关系 (46)4.3 铰接式客车操纵稳定性控制原理及目标 (48)4.3.1 直接横摆力偶矩控制的理论与方法 (48)4.3.2 直接横摆力矩控制目标及其理想模型 (51)4.4 铰接式客车操纵稳定性控制方法的研究 (53)4.4.1 副车PID控制—主车PID控制 (54)4.4.2 副车PID控制—主车模糊逻辑控制 (58)4.4.3 副车PID控制—主车PID模糊逻辑联合控制 (65)4.5 本章总结 (66)总结与展望 (67)参考文献 (69)攻读硕士学位期间取得的研究成果 (74)致谢 (75)第一章绪论第一章绪论1.1 课题背景及意义当前,由于全球经济的快速发展及与之伴随的人口和机动车辆的高速增长[1],城市面临的交通压力日益严峻。
基于Matlab 的客车转向侧翻稳定性分析
摘要:本文主要对客车转向行驶时的侧翻情况进行了研究,建立了客车在行驶过程中转向时的数学模型,推导出了稳态转向时客车侧翻临界车速的计算公式,并结合某客车结构参数和路面附着条件进行了仿真,得出了通过提高客车的抗侧翻性能来提高客车的行驶稳定性的方法。
关键词:客车;转向侧翻;稳定性分析;Matlab
0 引言
侧翻是指汽车在行驶过程中绕其纵轴转动900 或更大的角度,以至车身与地面相接触的一种极其危险的侧向运动。
汽车侧翻可分为两类:一是曲线运动引起的侧翻,二是绊倒侧翻。
曲线运动引起的侧翻是指汽车在道路(包括侧向坡道)上行驶时,由于汽车的侧向加速度超过一定限值,使得汽车内侧车轮的垂直反力为零而引起的侧翻[1]。
客车车身和质量比轿车等小型车大得多,而且其地板一般都比较高,在转向侧翻事故中,车体将向某一侧倾倒,与地面接触的侧围会产生变形,结构的变形可能侵入车厢内部,对乘客造成伤害[2]。
而侧翻试验是较难实施的且成本较大,本文通过建立客车侧翻的数学模型,在Matlab 中进行仿真来分析影响客车转向行驶稳定性的因素,从而为提高客车的操纵稳定性,在设计阶段保证客车结构参数的合理性,避免车辆行驶发生翻车事故奠定理论基础。
1 车辆转向侧翻模型
客车的前后桥一般采用非独立悬架,在行驶过程中遇到弯道或避开障碍物时需要紧急转向。
转向时车辆的质心绕转向瞬心C 作圆周运动。
Rr 为转向瞬心C 到后内侧车轮的转向半径;Rf 为转向瞬心C 到前内侧车轮的转向半径;θ 为汽车转向轮转过的角度;L 为汽车的轴距;汽车质心到前桥距离为a;汽车质心到到后桥距离为b。
2 车辆转向时的受力分析
车辆在转向时,会使车身向外侧倾斜,Gs 为客车车身的悬挂质量受的重力;Gu1 为客车前桥的非悬挂质量受的重力;Gu2为客车后桥的非悬挂质量受的重力;Fyi1,Fyi2 分别为地面给转向内侧车轮的侧向附着力;Fyo1,Fyo2 分别为地面给转向外侧车轮的侧向附着力;Fzi1,Fzi2 分别为地面给转向内侧车轮的支撑反力;Fzo1,Fzo2 分别为地面给转向外侧车轮的支撑反力;Fsy 为客车车身的悬挂质量转向时产生的侧向力;Fuy1,Fuy2 为前后车桥非悬挂质量产生的侧向力。
根据车辆转向时受力分析,为路面附着系数。
设Ms 为客车车身的悬挂质量;Mu1、Mu2 为客车前后桥的非悬挂质量;asy 为客车车身悬挂质量的侧向加速度;auy1、auy2 为客车前后桥非悬挂质量的侧向加速度。
3 车辆转向临界侧翻状态分析
转向时由于悬架的弹性变形,车身悬挂质量会向转向外侧倾斜,使其质心发生了偏移,同时使车身发生了侧倾。
设侧倾角为φ,侧倾角的大小与悬架的侧倾角刚度有关。
由于车轮的弹性变形,内侧车轮与外侧车轮的载荷发生了转移,外侧车轮载荷变大,内侧车轮载荷变小,这样内侧车轮弹性变形减小,外侧车轮弹性变相增大,车桥也发生了微小侧倾,如图3所示。
当转向内侧车轮所受地面支撑反力为零时,可认为汽车已达到转向侧翻的临界状态[3]。
Fzo 为转向时外侧车轮所受的力;Fzi 为转向时内侧车轮所受的力;φ 为转向离心力引起的车身侧倾角;Fyi,Fyo 分别为地面对内、外侧车轮的侧向反力;B 是轮距;hg 是车身悬挂质量的质心高度;hr 是非悬挂质量的质心高度。
4 影响车辆侧翻稳定性的因素分析
影响车辆侧翻稳定性的因素可分为两大类:一是与汽车设计参数有关的部分,如车辆整备质量、质心高度、车辆轮距和悬架特性参数等;二是与车辆行驶状态有关的部分,如车辆行驶速度、转弯半径、路面附着系数、驾驶员操作等[5]。
利用Matlab 软件,分析了质心高度、轮距、侧倾角、转向半径、路面附着系数对车辆转向侧翻的影响。
4.1 质心高度、轮距汽车质心高度与汽车侧翻系数成非线性关系,影响汽车质心高度的因素很多并对汽车侧翻阈值影响很大。
而质心高度与车辆的载重、悬架特性、车速等相关。
轮距受汽车最大车宽限制,其值是一个定值。
由式(15)可知,轮距对汽车侧翻的影响很大,轮距的增加可提高汽车的侧翻稳定性。
质心高度越高,车辆临界稳定车速越低。
质心高度的降低,有利于提高汽车转向行驶的临界稳定车速,因此有效地降低客车的重心,有利于提高其转向稳定性。
当质心高度一定时,增加轮距可以提高车辆的临界稳定车速。
因此,在满足设计要求的同时,尽可能的增加轮距对于提高客车转向稳定性有一定的意义。
4.2 侧倾角在研究车辆侧翻稳定性时,引入“侧倾中心”的概念,即将车身相对地面转动时的瞬时轴线称为车身侧倾轴线,该轴线通过汽车前、后轴处横断面上的瞬时转动中心为侧倾中心,它的位置取决于悬架系统的结构和特性参数等。
车身的侧倾角与临界车速的关系如图5 所示。
侧倾角与临界车速基本成线性关系,车身的侧倾角越小,车辆转向临界稳定车速越大。
车辆转向时车身侧倾角与悬架的侧倾角刚度有关,悬架的侧倾角刚度越大,车身发生侧倾的角度越小,故增大悬架的侧倾角刚度,可以改善车辆侧翻稳定性。
4.3 转向半径由式(8)可知,转向半径对侧向加速度影响很大,转向半
径越大,侧向加速度越小,对于车辆的转向行驶稳定性越有利。
转向半径与临界车速的关系可以看出随着转向半径的增大,车辆临界稳定车速也增大。
可见,汽车行驶时转向过急,导致转向半径过小,车辆可能发生侧翻的速度越低,即在低速时就可能发生侧翻的危险。
4.4 路面附着系数路面条件对于车辆转向稳定性也起着至关重要的作用,车辆在何种路面上行驶对于转向的安全也起着决定性的作用。
路面附着系数与临界车速的关系从图7 中可以看出随着路面附着性能的改善,客车转向行驶的临界稳定车速随之增加,转向轮转过的角度越小,临界车速越大,行驶越安全。
故改善客车行驶的路面环境有利于提高其行驶的稳定性。
5 结论
本文建立了客车在行驶过程中转向时的转向模型,推导出了车辆侧翻临界车速的计算公式,结合相关的车辆结构参数和路面附着条件在Matlab 中进行了仿真。
通过对仿真结果得出了结论:增大车辆的轮距、降低车辆的质心高度、增大车辆悬架的侧倾角刚度、增加转向时的半径、改善路面附着条件,可以提高车辆转向时的侧翻稳定性。
这为车辆在结构设计阶段改善其行驶稳定性奠定了理论基础。
本工程硕士论文源自。