机械原理第1章12节运动副机构运动简图
- 格式:ppt
- 大小:7.66 MB
- 文档页数:38
机构运动简图(Kinematic sketch)(2)机构运动简图的应用1)表示机构的组成情况;2)表示机构的运动情况,在机构运动简图上可对机构进行运动分 析和力分析。
(3)机构示意图:不按比例绘制的机构简图。
它只能表明机构的组成状况和结构特征,不能用来进行运动分析和力分析。
1、机构运动简图(1)定义:根据机构的运动尺寸,按一定的比例定出运动副的位置,再用表示运动副的符号和表示构件的几何图形将机构的运动情况表示出来,这种表示机构结构和运动特征的简单的图形称为机构运动简图。
机构运动简图常用的符号(1)分析机械的构成:认清机架、主动件(原动件)、中间从动件、最后的执行 构件(输出件),确定机械包含的构件总数;(2)分析机械的运动情况:从原动件开始,循着运动传递路线,分析各构件间的相对 运动性质,判定运动副的数目和类型;(3)合理选择投影面:选择多数构件的运动平面或平行于运动平面的平面做投影 面,必要时可选择辅助投影面或局部简图来表示主投影面难以 表达清楚的部分;(4)选择适当的比例尺:确定构件尺寸及各运动副之间的相对位置;)图上尺寸 ) 实际尺寸 mm m l ( ( = m (5)选定机械运动的某个位置,用表示构件和运动副的简单符号, 按一定顺序绘制简图 。
2、机构运动简图的绘制步骤例1 内燃机的机构运动简图绘制内燃机动画 1.认清机架、原动件、从动件(输出件)2.判别运动副数量和类型3.合理选择投影面4.选择比例尺5.绘制简图构件数:7 转动副:4 移动副:3 高副:3例2 小型压力机的机构运动 简图绘制 1.认清机架、原动件、从动件(输出件)2.判别运动副数量和类型3.合理选择投影面4.选择比例尺5.绘制简图。
机械原理运动副的画法机械原理是研究机械运动和受力的学科,其中运动副作为机械装置的基本组成部分,是机械运动实现的基础。
在机械原理中,通过描述和分析运动副的特点和运动规律,可以揭示机械运动过程中的各种力和力矩变化情况,从而为机械设计和分析提供有效的方法和手段。
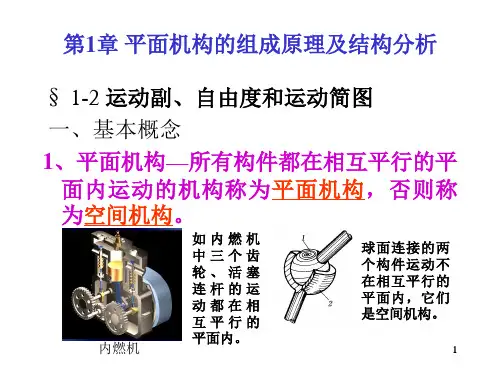
运动副是实现机械件相对运动的部件,可以分为平面运动副、空间运动副和虚拟运动副等多种类型。
不同类型的运动副具有不同的结构和工作原理,但它们都起到了实现运动的作用。
平面运动副是最常见的一种运动副,也是最简单的一种。
平面运动副的结构简单,通过连接节点或轴承等方式将两个连杆、齿轮等机构连接起来,实现相对平面运动。
平面运动副可以实现直线运动、回转运动和各种复杂的曲线运动。
对于平面运动副的画法,需要根据其结构和运动方式进行绘制。
首先要确定副的类型,例如直线副、回转副等。
然后,根据实际情况选择适当的比例和大小来绘制副的各个部分和连接方式。
在绘制过程中,要注意各个部件之间的几何关系,确保实际情况与绘制结果相符。
例如,对于直线副的画法,可以先确定副的位置和方向,然后绘制两个相互平行的轴线,表示两个相互连接的连杆或齿轮。
再根据实际情况选择适当的比例和大小,在两个轴线上标出两个节点或轴承的位置,表示连接部件。
最后,通过连接节点或轴承的方式将两个连杆或齿轮连接起来,表示副的运动方式。
空间运动副是指在三维空间中实现相对运动的副。
相比平面运动副,空间运动副的结构相对复杂,需要考虑三维几何关系和运动规律。
在绘制空间运动副时,需要确定副的类型和方向,并绘制相应的轴线和节点。
根据实际情况选择适当的比例和大小,绘制副的各个部件和连接方式。
在绘制过程中,要注意三维几何关系的表示,确保绘制结果与实际情况相符。
虚拟运动副是指在机械装置中表现出来的一种不直接参与计算和分析的运动副。
虚拟运动副通常在计算和分析过程中作为辅助副使用,用于简化和优化计算过程。
在绘制虚拟运动副时,一般可以简化表示,只需表示其位置和方向即可。