贴片机分类及基本工作原理
- 格式:ppt
- 大小:1.28 MB
- 文档页数:2
半导体贴片机的结构原理
半导体贴片机是一种用于将半导体元器件(如集成电路、二极管、三极管等)贴附到电路板上的自动化设备。
其结构原理包括以下几个部分:
1. 输送系统:半导体元件通常以卷带的形式供应,输送系统主要用于将卷带中的元件分离并传送到贴片区域。
输送系统通常由供料轮、分离轮、传送带等组成。
2. 传感系统:传感系统用于检测贴片区域是否有无元件、元件位置是否准确等信息。
传感系统通常采用光电传感器、激光传感器等。
3. 位置校准系统:位置校准系统用于确保贴附到电路板上的元件位置准确。
位置校准系统通常包括视觉定位系统和机械定位系统。
视觉定位系统通过摄像头或激光扫描仪等设备来检测电路板上的参考点,然后通过图像处理算法来确定元件的准确位置。
机械定位系统则通过精密的导轨和定位装置来确保元件的精准贴附。
4. 贴附系统:贴附系统用于将元件粘附到电路板上。
通常使用真空吸盘来吸起元件,然后通过运动轨迹控制将元件准确贴附到电路板上,并使用热风或红外线加热等方式将元件与电路板焊接。
5. 控制系统:控制系统用于控制整个贴片机的运行。
通常采用微控制器或PLC 等控制器来完成元件供料、位置校准、贴附等动作的控制,并与操作面板、传感器等进行连接。
综上所述,半导体贴片机的结构原理是通过输送系统将元件供应到贴片区域,通过传感系统检测元件信息,通过视觉定位和机械定位系统确定元件位置,然后通过贴附系统将元件粘附到电路板上,并通过控制系统进行整个贴片过程的控制。
(整理)贴片机基础知识.贴片机基础知识一、贴片机的介绍拱架型(Gantry)元件送料器、基板(PCB)是固定的,贴片头(安装多个真空吸料嘴)在送料器与基板之间来回移动,将元件从送料器取出,经过对元件位置与方向的调整,然后贴放于基板上。
由于贴片头是安装于拱架型的X/Y坐标移动横梁上,所以得名。
这类机型的优势在于:系统结构简单,可实现高精度,适于各种大小、形状的元件,甚至异型元件,送料器有带状、管状、托盘形式。
适于中小批量生产,也可多台机组合用于大批量生产。
这类机型的缺点在于:贴片头来回移动的距离长,所以速度受到限制。
对元件位置与方向的调整方法:1)、机械对中调整位置、吸嘴旋转调整方向,这种方法能达到的精度有限,较晚的机型已再不采用。
2)、激光识别、X/Y坐标系统调整位置、吸嘴旋转调整方向,这种方法可实现飞行过程中的识别,但不能用于球栅列陈元件BGA。
3)、相机识别、X/Y坐标系统调整位置、吸嘴旋转调整方向,一般相机固定,贴片头飞行划过相机上空,进行成像识别,比激光识别耽误一点时间,但可识别任何元件,也有实现飞行过程中的识别的相机识别系统,机械结构方面有其它牺牲。
转塔型(Turret)元件送料器放于一个单坐标移动的料车上,基板(PCB)放于一个X/Y坐标系统移动的工作台上,贴片头安装在一个转塔上,工作时,料车将元件送料器移动到取料位置,贴片头上的真空吸料嘴在取料位置取元件,经转塔转动到贴片位置(与取料位置成180度),在转动过程中经过对元件位置与方向的调整,将元件贴放于基板上。
这类机型的优势在于:一般,转塔上安装有十几到二十几个贴片头,每个贴片头上安装2~4个真空吸嘴(较早机型)至5~6个真空吸嘴(现在机型)。
由于转塔的特点,将动作细微化,选换吸嘴、送料器移动到位、取元件、元件识别、角度调整、工作台移动(包含位置调整)、贴放元件等动作都可以在同一时间周期内完成,所以实现真正意义上的高速度。
目前最快的时间周期达到0.08~0.10秒钟一片元件。
高速贴片机结构与原理高速贴片机是一种用于电子元器件自动贴装的设备。
它以高速、高精度和高效率的特点广泛应用于电子制造行业。
本文将从结构和原理两个方面介绍高速贴片机的工作原理和组成部分。
一、结构高速贴片机主要由进料系统、定位系统、贴装系统和控制系统组成。
1. 进料系统:进料系统用于将电子元器件供给到贴装机的工作区域。
它通常包括供料器和进料传送带。
供料器负责将元器件从料盘或管道中取出,并通过进料传送带将其输送到贴装区域。
2. 定位系统:定位系统用于确定元器件在贴装区域的位置。
它通常包括视觉定位系统和机械定位系统。
视觉定位系统通过摄像头和图像处理算法实现对元器件位置的精确定位。
机械定位系统则通过传感器和精密导轨等装置实现对元器件位置的控制。
3. 贴装系统:贴装系统是高速贴片机的核心部分,用于将电子元器件精确地贴装到PCB板上。
贴装系统通常包括贴装头、压力控制装置和贴装平台。
贴装头负责将元器件从供料器中取出,并将其精确地贴装到PCB板上。
压力控制装置用于控制贴装头的压力,以保证贴装的稳定性。
贴装平台则提供一个稳定的工作台面,使贴装过程更加精确。
4. 控制系统:控制系统是高速贴片机的大脑,用于控制整个贴装过程。
它通常由计算机和PLC控制器组成。
计算机负责处理图像信息、控制贴装头的运动和监控贴装过程。
PLC控制器则负责控制进料系统、定位系统和贴装系统的运行。
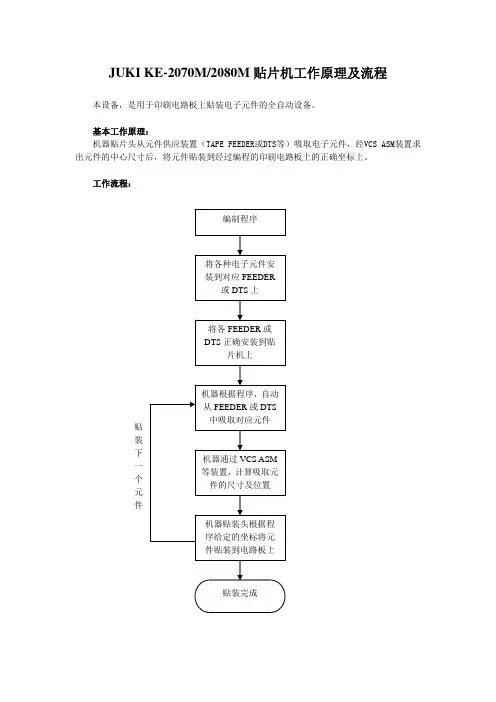
二、原理高速贴片机的工作原理可以简单描述为以下几个步骤:1. 元器件供给:进料系统将电子元器件供给到贴装区域。
2. 定位检测:定位系统对元器件进行定位检测,确定其在贴装区域的位置。
3. 贴装操作:贴装系统根据定位信息,通过贴装头将元器件从供料器中取出,并精确地贴装到PCB板上。
4. 焊接固定:在贴装完成后,PCB板经过传送带运送到焊接区域,焊接机器对元器件进行焊接,固定在PCB板上。
5. 检测和排除故障:贴装过程中,控制系统会对贴装质量进行检测,如果发现贴装错误或故障,会及时进行排除。
贴片机贴装头工作原理
贴片机贴装头是贴片机的核心部件,主要用于将贴片元件精确、快速地粘贴到印刷电路板上。
其工作原理如下:
1. 元件供料:将贴片元件从供料器中取出,并通过输送系统传送至贴装头工作区域。
2. 元件定位:传感器检测元件位置,贴装头根据传感器信号确定元件的精确位置。
3. 贴装头下压:贴装头以高速下降,将元件接触到印刷电路板上的贴装点。
4. 粘贴:通过真空吸附或磁力的作用,贴装头将元件粘贴到贴装点上,并确保粘贴的位置准确。
5. 贴装头抬起:贴装头抬起,脱离元件和印刷电路板。
6. 检测:通过传感器和视觉系统对元件的位置和贴装质量进行检测,以确保贴装的准确性和一致性。
7. 搬运:完成贴装后,输送系统将已经贴好的印刷电路板移出工作区域,以便后续工序处理。
需要注意的是,贴片机贴装头的工作原理可能会根据不同的机型和技术特点有所差异,上述仅为一般的工作原理描述。
fuji nxt贴片机工作原理FUJI NXT贴片机是一种高速自动贴片机,广泛应用于电子工业中的贴片制造过程。
FUJI NXT贴片机工作原理主要包括以下几个步骤:1. 准备工作:在贴片机开始工作前,需要事先将贴片原料准备好,即将原料组件放置在进料器中,准备好贴片程序和工作参数设置。
2. 图像识别:贴片机工作时,首先会对进料器中的原料进行图像识别。
通过光学系统,贴片机会扫描原料上的二维码或其他标识,以识别原料的类型、尺寸和位置等信息。
3. 精确定位:识别完成后,贴片机会使用相机和传感器等设备进行精确定位。
它会通过识别原料上的特定标记或特征,以确定原料的精确位置和方向。
4. 贴片操作:一旦原料的位置被确认,贴片机就会开始进行贴片操作。
它会使用一个特殊的吸料头,将贴片原料从进料器中吸取,并精确地放置在PCB板上的指定位置。
通过控制吸料头的运动和旋转,贴片机可以保证精确的放置和定位。
5. 锡膏喷涂:在部分情况下,贴片机还会在贴片过程中喷涂锡膏,以便实现焊接。
这是通过向贴片处喷射熔化的锡膏,并确保锡膏与PCB板上的焊点完全接触。
6. 检测和校正:贴片机工作过程中会进行实时的检测和校正。
它会使用传感器和相机等设备检测贴片的精确度和质量,并根据检测结果进行相应的校正操作,以确保贴片的准确性和一致性。
7. 完成贴片:一轮贴片操作完成后,贴片机会等待下一次贴片任务。
在整个过程中,贴片机会持续地对原料进行检测和供料,以保证连续的贴片操作。
综上所述,FUJI NXT贴片机通过图像识别、精确定位、贴片操作和检测校正等步骤,实现了高速、精确和连续的贴片过程。
它可以大大提高贴片效率和质量,广泛应用于电子工业中的贴片制造。
Fuji NXT贴片机是一种高速贴片设备,用于将电子元器件(如电阻、电容、芯片等)精确地贴在PCB板上。
它的工作原理包括以下几步:1. 载板:首先,需要将PCB板放置在贴片机的工作台上。
贴片机通常配备了自动进板系统,可以将PCB板精确地定位于工作区域。
高速多功能自动贴片机的构造与工作原理分析自动贴片技术是现代电子制造过程中最重要的环节之一。
高速多功能自动贴片机在电子制造行业中发挥着重要的作用,能够实现高效、精确地贴附电子元件于印刷电路板(PCB)上。
本文将对高速多功能自动贴片机的构造与工作原理进行分析。
高速多功能自动贴片机是一种自动化设备,由多个部件组成。
其基本构造包括供料系统、传送系统、精准定位系统、贴附系统和控制系统等。
首先,供料系统是高速多功能自动贴片机的重要组成部分,用于提供电子元件供给。
供料系统通常由元件供料器和组件供料器组成。
元件供料器通过振动盘或皮带传送机构将电子元件自动供给给贴片机,而组件供料器则用于存放和供应已经装配好的元件。
其次,传送系统负责将印刷电路板与电子元件精准地对位并传送到贴附位置。
传送系统通常由输送带、驱动装置和定位装置组成。
输送带将待贴片的印刷电路板和电子元件从供料系统输送到下一个工作站,驱动装置控制输送带的速度和方向,定位装置则确保印刷电路板和电子元件的精准对位。
第三,精准定位系统用于实现高精度的定位和放置电子元件。
该系统的核心部件是CCD摄像头,通过图像处理算法可以实现对电子元件和印刷电路板的实时监控和定位。
CCD摄像头采集图像数据,并将其传输给控制系统进行处理。
贴附系统是高速多功能自动贴片机中的另一个关键部分,用于将电子元件精确地贴附在印刷电路板上。
该系统通常由贴附头、真空吸附装置和贴附传动机构组成。
贴附头将电子元件从组件供料器中取出,并通过真空吸盘将其固定,然后将其精准地贴附在印刷电路板上。
贴附传动机构控制贴附头的移动和压紧力度,确保贴附的准确性和稳定性。
最后,控制系统是高速多功能自动贴片机的大脑,用于控制整个贴片机的运行和协调各个部件的工作。
控制系统通常由PLC(可编程逻辑控制器)或PC(个人电脑)控制。
通过预先编写好的程序,控制系统可以协调供料、传送、定位和贴附过程,确保贴片机的正常运行和高效生产。
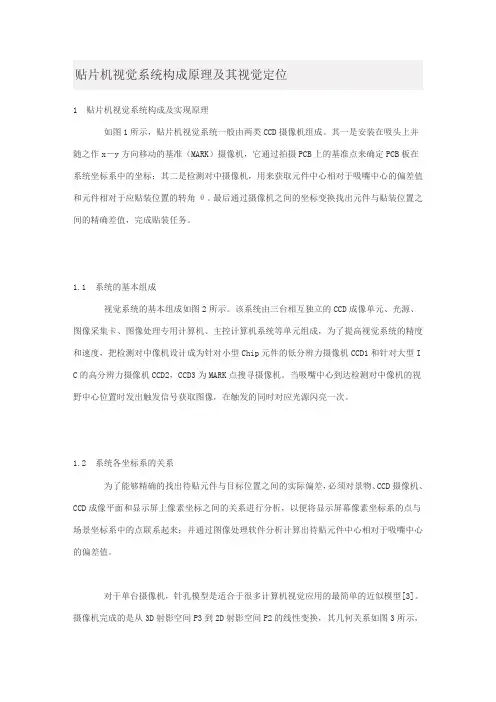
贴片机视觉系统构成原理及其视觉定位1 贴片机视觉系统构成及实现原理如图1所示,贴片机视觉系统一般由两类CCD摄像机组成。
其一是安装在吸头上并随之作x-y方向移动的基准(MARK)摄像机,它通过拍摄PCB上的基准点来确定PCB板在系统坐标系中的坐标;其二是检测对中摄像机,用来获取元件中心相对于吸嘴中心的偏差值和元件相对于应贴装位置的转角θ。
最后通过摄像机之间的坐标变换找出元件与贴装位置之间的精确差值,完成贴装任务。
1.1 系统的基本组成视觉系统的基本组成如图2所示。
该系统由三台相互独立的CCD成像单元、光源、图像采集卡、图像处理专用计算机、主控计算机系统等单元组成,为了提高视觉系统的精度和速度,把检测对中像机设计成为针对小型Chip元件的低分辨力摄像机CCD1和针对大型I C的高分辨力摄像机CCD2,CCD3为MARK点搜寻摄像机。
当吸嘴中心到达检测对中像机的视野中心位置时发出触发信号获取图像,在触发的同时对应光源闪亮一次。
1.2 系统各坐标系的关系为了能够精确的找出待贴元件与目标位置之间的实际偏差,必须对景物、CCD摄像机、CCD成像平面和显示屏上像素坐标之间的关系进行分析,以便将显示屏幕像素坐标系的点与场景坐标系中的点联系起来;并通过图像处理软件分析计算出待贴元件中心相对于吸嘴中心的偏差值。
对于单台摄像机,针孔模型是适合于很多计算机视觉应用的最简单的近似模型[3]。
摄像机完成的是从3D射影空间P3到2D射影空间P2的线性变换,其几何关系如图3所示,为便于进一步解释,定义如下4个坐标系统:(1)欧氏场景坐标系(下标为w):原点在OW,点X和U用场景坐标系来表示。
(2)欧氏摄像机坐标系(下标为c),原点在焦点C=Oc,坐标轴Zc与光轴重合并指向图像平面外。
在场景坐标系和摄像机坐标系之间存在着唯一的关系,可以通过一个平移t和一个旋转R构成的欧氏变换将场景坐标系转化为摄像机坐标。
其关系如式(1)所示:(3)欧氏图像坐标系(下标为i),坐标轴与摄像机坐标系一致,Xi和Yi位于图像平面上,Oi像素坐标系的坐标为(xp0,yp0)。
贴片机飞达工作原理贴片机和飞达是电子制造行业中不可或缺的设备。
它们的作用是在电路板上安装各种元器件,例如电容、电阻、集成电路等。
本文将会介绍它们的工作原理。
贴片机是一种自动化的设备,可以快速地安装各种元器件到电路板上。
它主要分为两种类型:贴片机和贴片机。
第一种类型称为“通孔式贴片机”,它用于安装传统的引线元器件,比如电阻和电容。
第二种类型称为“无孔式贴片机”,它用于安装片式电子元器件,例如表面贴装元器件和芯片。
这两种类型的贴片机都有着相同的工作原理。
贴片机的工作原理可以简要概括为四个步骤:1)元器件供料;2)元器件识别和校准;3)元器件安装;4)焊接。
1. 元器件供料元器件供料是指将各种元器件提供给贴片机进行安装。
元器件可以是弯曲的导线或片状的电子器件。
其供给方式则分为两种类型:带式供料和管式供料。
较常用的带式供料是将电子器件拼成一个连续的带状体,并被卡在贴片机上的滚动加工机构中。
在合适的位置上,贴片机会用吸嘴来夹住电子器件并将其分离。
2. 元器件识别和校准元器件识别是识别元器件型号和方向,并校对其相对于电路板的位置。
对于攀附在带上的电子器件,贴片机可以采用机器视觉系统来自动扫描和分析元器件。
对于弯曲的引脚,贴片机会采用机械传感器或电磁传感器来确定引脚位置。
3. 元器件安装元器件安装是将识别并校准的元器件放置在电路板的指定位置上。
贴片机通常采用几组电磁阀控制吸嘴的机械运动,将元器件容易地插入到电路板中。
其中最重要的技术之一是吸嘴的设计和制造,因为它必须以准确的角度和速度来夹住元器件,使其不损坏。
4. 焊接焊接就是将元器件与电路板焊接在一起。
在现代贴片技术中,共有两种技术来焊接元器件。
一种是表面贴装技术,这种技术采用一种名为“热飞燕”的焊接头在电路板上形成焊点。
热飞燕使用的是热力和压力的组合,它可以焊接小型元器件,例如 SMD 元器件。
另一种技术是一种称为“波峰焊”的技术。
在这种技术中,将焊料灌入一个预加热的容器中,然后用一个类似于波浪的托盘将电路板插入,这样电子部件就被焊接在电路板上了。
贴片机的原理拱架型贴片机(Gantry)元件送料器、基板(PCB)是固定的,贴片头(安装多个真空吸料嘴)在送料器与基板之间来回移动,将元件从送料器取出,经过对元件位置与方向的调整,然后贴放于基板上。
由于贴片头是安装于拱架型的X/Y坐标移动横梁上,所以得名。
拱架型贴片机对元件位置与方向的调整方法:1)、机械对中调整位置、吸嘴旋转调整方向,这种方法能达到的精度有限,较晚的机型已再不采用。
2)、激光识别、X/Y坐标系统调整位置、吸嘴旋转调整方向,这种方法可实现飞行过程中的识别,但不能用于球栅列陈元件BGA。
3)、相机识别、X/Y坐标系统调整位置、吸嘴旋转调整方向,一般相机固定,贴片头飞行划过相机上空,进行成像识别,比激光识别耽误一点时间,但可识别任何元件,也有实现飞行过程中的识别的相机识别系统,机械结构方面有其它牺牲。
这种形式由于贴片头来回移动的距离长,所以速度受到限制。
现在一般采用多个真空吸料嘴同时取料(多达上十个)和采用双梁系统来提高速度,即一个梁上的贴片头在取料的同时,另一个梁上的贴片头贴放元件,速度几乎比单梁系统快一倍。
但是实际应用中,同时取料的条件较难达到,而且不同类型的元件需要换用不同的真空吸料嘴,换吸料嘴有时间上的延误。
这类机型的优势在于:系统结构简单,可实现高精度,适于各种大小、形状的元件,甚至异型元件,送料器有带状、管状、托盘形式。
适于中小批量生产,也可多台机组合用于大批量生产。
引转塔型拱架型贴片机(Turret)元件送料器放于一个单坐标移动的料车上,基板(PCB)放于一个X/Y坐标系统移动的工作台上,贴片头安装在一个转塔上,工作时,料车将元件送料器移动到取料位置,贴片头上的真空吸料嘴在取料位置取元件,经转塔转动到贴片位置(与取料位置成180度),在转动过程中经过对元件位置与方向的调整,将元件贴放于基板上。
对元件位置与方向的调整方法:1)、机械对中调整位置、吸嘴旋转调整方向,这种方法能达到的精度有限,较晚的机型已再不采用。
SMT设备方案介绍引言SMT(Surface Mount Technology)是一种表面贴装技术,现在在电子制造业中被广泛应用。
SMT设备是实现表面贴装工艺的关键设备,其能够高效、精确地将电子元件粘贴在PCB板上。
本文将介绍SMT设备的基本原理、分类和应用。
1. SMT设备的基本原理SMT设备的基本原理是通过将表面组装元件(SMD)粘贴到PCB板上,完成电子元器件的安装。
其主要由以下组成部分构成:1.1 自动上料机自动上料机是SMT设备中的重要组成部分,其功能是将元器件从供料器中自动取出并送至下一工序。
上料机具有快速、准确、稳定的特点,可实时监测元器件的供料情况。
1.2 贴片机贴片机是SMT设备中的核心设备,用于将SMD粘贴到PCB板上。
其工作原理是通过精确的运动控制系统,将SMD从送料器中取出并粘贴到设计好的位置。
贴片机具有高速度、高精度、多功能的特点,可以针对不同尺寸和类型的SMD进行粘贴。
1.3 热炉热炉是SMT设备中用于焊接的部分,其主要功能是通过加热,将SMD与PCB 板焊接在一起。
热炉通常采用热风循环的方式,使热量均匀分布,保证焊接的质量。
2. SMT设备的分类根据功能和用途的不同,SMT设备可以分为以下几类:2.1 贴片机贴片机根据贴片头的种类可以分为单头、双头、多头贴片机等。
根据贴片速度的不同,还可分为中速、高速贴片机。
贴片机的选择应根据生产需求和贴片质量要求进行合理选择。
2.2 焊接设备焊接设备包括波峰焊机和回流焊机。
波峰焊机主要用于大功率元件的焊接,回流焊机则适用于小功率元件和灵活生产线。
焊接设备的选择应根据焊接工艺和产品要求进行。
2.3 检测设备检测设备主要用于对完成贴片和焊接的产品进行检测和质量控制。
常见的检测设备有AOI(自动光学检测),SPI(针对贴片前的Solder Paste上光的时候检测),X-ray(检测焊接点的质量)等。
2.4 辅助设备辅助设备包括供料机、传送带、印刷机等。
贴片机理论知识贴片机:又称“贴装机”、“表面贴装系统”(Surface Mount System),在生产线中,它配置在点胶机或丝网印刷机之后,是通过移动贴装头把表面贴装元器件准确地放置PCB焊盘上的一种设备。
分为手动和全自动两种。
全自动贴片机是用来实现高速、高精度地全自动地贴放元器件的设备,是整个SMT生产中最关键、最复杂的设备。
贴片机是SMT的生产线中的主要设备,现在,贴片机已从早期的低速机械贴片机发展为高速光学对中贴片机,并向多功能、柔性连接模块化发展。
贴片机的原理拱架型贴片机(Gantry)元件送料器、基板(PCB)是固定的,贴片头(安装多个真空吸料嘴)在送料器与基板之间来回移动,将元件从送料器取出,经过对元件位置与方向的调整,然后贴放于基板上。
由于贴片头是安装于拱架型的X/Y 坐标移动横梁上,所以得名。
拱架型贴片机对元件位置与方向的调整方法:1)、机械对中调整位置、吸嘴旋转调整方向,这种方法能达到的精度有限,较晚的机型已再不采用。
2)、激光识别、X/Y坐标系统调整位置、吸嘴旋转调整方向,这种方法可实现飞行过程中的识别,但不能用于球栅列陈元件BGA。
3)、相机识别、X/Y坐标系统调整位置、吸嘴旋转调整方向,一般相机固定,贴片头飞行划过相机上空,进行成像识别,比激光识别耽误一点时间,但可识别任何元件,也有实现飞行过程中的识别的相机识别系统,机械结构方面有其它牺牲。
这种形式由于贴片头来回移动的距离长,所以速度受到限制。
现在一般采用多个真空吸料嘴同时取料(多达上十个)和采用双梁系统来提高速度,即一个梁上的贴片头在取料的同时,另一个梁上的贴片头贴放元件,速度几乎比单梁系统快一倍。
但是实际应用中,同时取料的条件较难达到,而且不同类型的元件需要换用不同的真空吸料嘴,换吸料嘴有时间上的延误。
这类机型的优势在于:系统结构简单,可实现高精度,适于各种大小、形状的元件,甚至异型元件,送料器有带状、管状、托盘形式。