LINUX设备驱动程序(4)
- 格式:ppt
- 大小:364.50 KB
- 文档页数:31
linux 驱动的 ioctl 详细说明【实用版】目录1.驱动概述2.ioctl 的作用3.ioctl 的参数4.ioctl 的返回值5.ioctl 的错误码6.设备相关的 ioctl 调用7.总结正文1.驱动概述在 Linux 系统中,驱动程序是一种特殊的程序,它们用于控制和管理硬件设备。
驱动程序通过系统调用接口与操作系统内核进行交互,以实现对硬件设备的控制和管理。
在 Linux 中,声卡驱动程序是一个重要的驱动程序类型,它用于控制和管理声卡设备。
2.ioctl 的作用ioctl(input/output control)是 Linux 系统中的一个重要系统调用,它用于实现对设备驱动程序的控制和管理。
ioctl 函数通过传递特定的参数,可以实现对设备进行配置、控制和查询等操作。
对于声卡驱动程序来说,ioctl 函数可以用于实现对声卡设备的各种控制和管理操作。
3.ioctl 的参数ioctl 函数的参数主要包括两个部分:一个是设备文件描述符,它是通过 open、create 等系统调用创建的;另一个是参数缓冲区,它用于存储 ioctl 函数所需的参数。
此外,ioctl 函数还可能需要一些其他参数,具体取决于所使用的设备类型和操作。
4.ioctl 的返回值ioctl 函数的返回值表示函数执行的结果。
如果函数执行成功,则返回 0;如果发生错误,则返回 -1,并设置相应的错误码。
错误码可以通过 errno 系统变量获取。
5.ioctl 的错误码ioctl 函数返回的错误码可以用来判断函数执行是否成功。
常见的错误码包括:- EINVAL:无效的参数。
- EIO:设备 I/O 错误。
- EAGAIN:设备繁忙,需要重试。
- ENODEV:指定的设备不存在。
- ENOENT:指定的设备文件描述符无效。
6.设备相关的 ioctl 调用不同的设备类型可能需要使用不同的 ioctl 函数进行控制和管理。
对于声卡设备,常见的 ioctl 调用包括:- audio_ioctl:用于实现对声卡设备的音频输入输出控制。
Linux设备驱动程序原理及框架-内核模块入门篇内核模块介绍应用层加载模块操作过程内核如何支持可安装模块内核提供的接口及作用模块实例内核模块内核模块介绍Linux采用的是整体式的内核结构,这种结构采用的是整体式的内核结构,采用的是整体式的内核结构的内核一般不能动态的增加新的功能。
为此,的内核一般不能动态的增加新的功能。
为此,Linux提供了一种全新的机制,叫(可安装) 提供了一种全新的机制,可安装) 提供了一种全新的机制模块” )。
利用这个机制“模块”(module)。
利用这个机制,可以)。
利用这个机制,根据需要,根据需要,在不必对内核重新编译链接的条件将可安装模块动态的插入运行中的内核,下,将可安装模块动态的插入运行中的内核,成为内核的一个有机组成部分;成为内核的一个有机组成部分;或者从内核移走已经安装的模块。
正是这种机制,走已经安装的模块。
正是这种机制,使得内核的内存映像保持最小,的内存映像保持最小,但却具有很大的灵活性和可扩充性。
和可扩充性。
内核模块内核模块介绍可安装模块是可以在系统运行时动态地安装和卸载的内核软件。
严格来说,卸载的内核软件。
严格来说,这种软件的作用并不限于设备驱动,并不限于设备驱动,例如有些文件系统就是以可安装模块的形式实现的。
但是,另一方面,可安装模块的形式实现的。
但是,另一方面,它主要用来实现设备驱动程序或者与设备驱动密切相关的部分(如文件系统等)。
密切相关的部分(如文件系统等)。
课程内容内核模块介绍应用层加载模块操作过程内核如何支持可安装模块内核提供的接口及作用模块实例内核模块应用层加载模块操作过程内核引导的过程中,会识别出所有已经安装的硬件设备,内核引导的过程中,会识别出所有已经安装的硬件设备,并且创建好该系统中的硬件设备的列表树:文件系统。
且创建好该系统中的硬件设备的列表树:/sys 文件系统。
(udev 服务就是通过读取该文件系统内容来创建必要的设备文件的。
)。
Linux下的硬件驱动——USB设备什么是USB设备?USB即Universal Serial Bus,翻译过来就是通用串行总线。
它是一种规范化的、快速的、热插拔的串行输入/输出接口。
USB接口常被用于连接鼠标、键盘、打印机、扫描仪、音频设备、存储设备等外围设备。
Linux下的USB驱动在Linux系统中,每个USB设备都需要一个相应的驱动程序来驱动。
从Linux 2.4开始,内核提供了完整的USB设备支持。
对于每个USB设备,内核都会自动加载对应的驱动程序。
Linux下的USB设备驱动程序主要分为以下几个部分:USB核心驱动程序USB核心驱动程序是操作系统内核中处理USB设备的核心模块,负责与各种类型的USB设备进行通信,包括主机控制器、USB总线、USB设备等。
它与驱动程序和应用程序之间起到了桥梁的作用,为驱动程序提供了USB设备的基础支持。
USB设备驱动程序USB设备驱动程序是与特定USB设备相对应的驱动程序,为USB设备提供具体的读写功能和其他控制功能。
USB核心驱动程序和USB设备驱动程序之间的接口USB核心驱动程序和USB设备驱动程序之间的接口是指USB层和应用程序层之间的接口,负责传递各种USB操作的命令和数据。
如何编译一个USB设备驱动编译一个USB设备驱动程序需要按照以下步骤进行:步骤一:安装必要的软件包首先需要安装编译和调试USB设备驱动所需的软件包,包括编译工具链、内核源代码、内核头文件等。
sudo apt-get install build-essential linux-source linux-headers-`una me -r`步骤二:编写代码现在可以编写USB设备驱动程序的代码,此处不做详细介绍。
步骤三:编译代码在终端窗口中进入USB设备驱动程序所在的目录下,输入以下命令进行编译:make此命令将会编译USB设备驱动程序,并生成一个将驱动程序与内核进行连接的模块文件。
如何在Linux系统中安装驱动程序Linux系统作为一个开源的操作系统,广泛应用于各种设备和领域。
而安装驱动程序是在Linux系统中使用外部硬件设备的关键步骤之一。
在本文中,我们将学习如何在Linux系统中安装驱动程序的方法和步骤。
1. 检查硬件设备在安装驱动程序之前,首先需要确定硬件设备的型号和制造商。
可以通过查询设备的型号或者查看设备的相关文档来获取这些信息。
这是非常重要的,因为不同的设备可能需要不同的驱动程序来正确地工作。
2. 更新系统在安装驱动程序之前,确保你的Linux系统已经是最新的状态。
可以通过在终端中运行以下命令来更新系统:```sudo apt-get updatesudo apt-get upgrade```更新系统可以确保你拥有最新的软件包和驱动程序,以获得更好的兼容性和性能。
3. 查找合适的驱动程序一般来说,大部分硬件设备的驱动程序都可以在Linux系统的软件仓库中找到。
可以通过使用包管理器(如apt、yum等)来查找并安装合适的驱动程序。
运行以下命令来搜索并安装特定的驱动程序:```sudo apt-cache search 驱动程序名称sudo apt-get install 驱动程序名称```注意替换“驱动程序名称”为具体的驱动程序名称。
安装驱动程序可能需要输入管理员密码和确认安装。
如果你无法在软件仓库中找到合适的驱动程序,可以转向设备的制造商网站或者开源社区来获取。
下载驱动程序后,根据驱动程序提供的文档和说明来安装。
4. 编译和安装驱动程序有些驱动程序可能需要手动编译和安装。
在这种情况下,你需要确保你的系统已经安装了编译工具(如GCC、make等)。
在终端中切换到驱动程序所在的目录,并按照以下步骤进行编译和安装:```./configuremakesudo make install```以上命令将分别进行配置、编译和安装驱动程序。
在进行安装之前,可能需要输入一些配置选项或者确认安装。
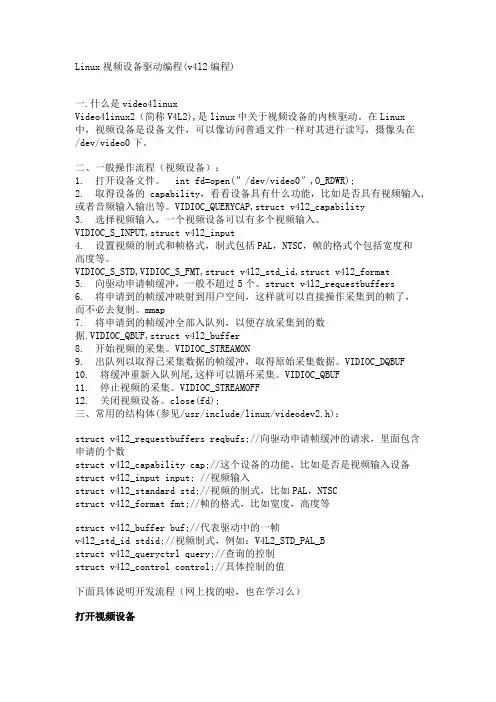
Linux视频设备驱动编程(v4l2编程)一.什么是video4linuxVideo4linux2(简称V4L2),是linux中关于视频设备的内核驱动。
在Linux 中,视频设备是设备文件,可以像访问普通文件一样对其进行读写,摄像头在/dev/video0下。
二、一般操作流程(视频设备):1. 打开设备文件。
int fd=open(”/dev/video0″,O_RDWR);2. 取得设备的capability,看看设备具有什么功能,比如是否具有视频输入,或者音频输入输出等。
VIDIOC_QUERYCAP,struct v4l2_capability3. 选择视频输入,一个视频设备可以有多个视频输入。
VIDIOC_S_INPUT,struct v4l2_input4. 设置视频的制式和帧格式,制式包括PAL,NTSC,帧的格式个包括宽度和高度等。
VIDIOC_S_STD,VIDIOC_S_FMT,struct v4l2_std_id,struct v4l2_format5. 向驱动申请帧缓冲,一般不超过5个。
struct v4l2_requestbuffers6. 将申请到的帧缓冲映射到用户空间,这样就可以直接操作采集到的帧了,而不必去复制。
mmap7. 将申请到的帧缓冲全部入队列,以便存放采集到的数据.VIDIOC_QBUF,struct v4l2_buffer8. 开始视频的采集。
VIDIOC_STREAMON9. 出队列以取得已采集数据的帧缓冲,取得原始采集数据。
VIDIOC_DQBUF10. 将缓冲重新入队列尾,这样可以循环采集。
VIDIOC_QBUF11. 停止视频的采集。
VIDIOC_STREAMOFF12. 关闭视频设备。
close(fd);三、常用的结构体(参见/usr/include/linux/videodev2.h):struct v4l2_requestbuffers reqbufs;//向驱动申请帧缓冲的请求,里面包含申请的个数struct v4l2_capability cap;//这个设备的功能,比如是否是视频输入设备struct v4l2_input input; //视频输入struct v4l2_standard std;//视频的制式,比如PAL,NTSCstruct v4l2_format fmt;//帧的格式,比如宽度,高度等struct v4l2_buffer buf;//代表驱动中的一帧v4l2_std_id stdid;//视频制式,例如:V4L2_STD_PAL_Bstruct v4l2_queryctrl query;//查询的控制struct v4l2_control control;//具体控制的值下面具体说明开发流程(网上找的啦,也在学习么)打开视频设备在V4L2中,视频设备被看做一个文件。
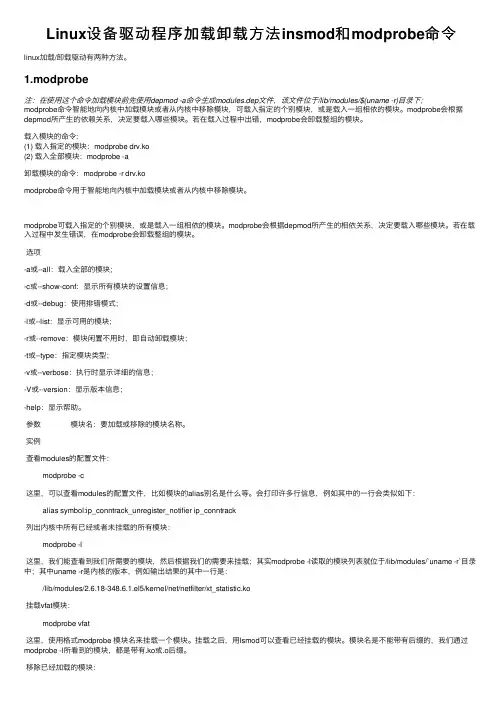
Linux设备驱动程序加载卸载⽅法insmod和modprobe命令linux加载/卸载驱动有两种⽅法。
1.modprobe注:在使⽤这个命令加载模块前先使⽤depmod -a命令⽣成modules.dep⽂件,该⽂件位于/lib/modules/$(uname -r)⽬录下;modprobe命令智能地向内核中加载模块或者从内核中移除模块,可载⼊指定的个别模块,或是载⼊⼀组相依的模块。
modprobe会根据depmod所产⽣的依赖关系,决定要载⼊哪些模块。
若在载⼊过程中出错,modprobe会卸载整组的模块。
载⼊模块的命令:(1) 载⼊指定的模块:modprobe drv.ko(2) 载⼊全部模块:modprobe -a卸载模块的命令:modprobe -r drv.komodprobe命令⽤于智能地向内核中加载模块或者从内核中移除模块。
modprobe可载⼊指定的个别模块,或是载⼊⼀组相依的模块。
modprobe会根据depmod所产⽣的相依关系,决定要载⼊哪些模块。
若在载⼊过程中发⽣错误,在modprobe会卸载整组的模块。
选项-a或--all:载⼊全部的模块;-c或--show-conf:显⽰所有模块的设置信息;-d或--debug:使⽤排错模式;-l或--list:显⽰可⽤的模块;-r或--remove:模块闲置不⽤时,即⾃动卸载模块;-t或--type:指定模块类型;-v或--verbose:执⾏时显⽰详细的信息;-V或--version:显⽰版本信息;-help:显⽰帮助。
参数模块名:要加载或移除的模块名称。
实例查看modules的配置⽂件:modprobe -c这⾥,可以查看modules的配置⽂件,⽐如模块的alias别名是什么等。
会打印许多⾏信息,例如其中的⼀⾏会类似如下:alias symbol:ip_conntrack_unregister_notifier ip_conntrack列出内核中所有已经或者未挂载的所有模块:modprobe -l这⾥,我们能查看到我们所需要的模块,然后根据我们的需要来挂载;其实modprobe -l读取的模块列表就位于/lib/modules/`uname -r`⽬录中;其中uname -r是内核的版本,例如输出结果的其中⼀⾏是:/lib/modules/2.6.18-348.6.1.el5/kernel/net/netfilter/xt_statistic.ko挂载vfat模块:modprobe vfat这⾥,使⽤格式modprobe 模块名来挂载⼀个模块。
LINUX设备驱动开发详解概述LINUX设备驱动开发是一项非常重要的任务,它使得硬件设备能够与操作系统进行有效地交互。
本文将详细介绍LINUX设备驱动开发的基本概念、流程和常用工具,帮助读者了解设备驱动开发的要点和技巧。
设备驱动的基本概念设备驱动是连接硬件设备和操作系统的桥梁,它负责处理硬件设备的输入和输出,并提供相应的接口供操作系统调用。
设备驱动一般由设备驱动程序和设备配置信息组成。
设备驱动程序是编写解决设备驱动的代码,它负责完成设备初始化、IO操作、中断处理、设备状态管理等任务。
设备驱动程序一般由C语言编写,使用Linux内核提供的API函数进行开发。
设备配置信息是定义硬件设备的相关参数和寄存器配置的文件,它告诉操作系统如何与硬件设备进行交互。
设备配置信息一般以设备树或者直接编码在设备驱动程序中。
设备驱动的开发流程设备驱动的开发流程包括设备初始化、设备注册、设备操作函数编写和设备驱动注册等几个主要步骤。
下面将详细介绍这些步骤。
设备初始化设备初始化是设备驱动开发的第一步,它包括硬件初始化和内存分配两个主要任务。
硬件初始化是对硬件设备进行基本的初始化工作,包括寄存器配置、中断初始化等。
通过操作设备的寄存器,将设备设置为所需的状态。
内存分配是为设备驱动程序分配内存空间以便于执行。
在设备初始化阶段,通常需要为设备驱动程序分配一块连续的物理内存空间。
设备注册设备注册是将设备驱动程序与设备对象进行关联的过程,它使得操作系统能够正确地管理设备。
设备注册包括设备号分配、设备文件创建等操作。
设备号是设备在系统中的唯一标识符,通过设备号可以找到设备对象对应的设备驱动程序。
设备号分配通常由操作系统负责,设备驱动程序通过注册函数来获取设备号。
设备文件是用户通过应用程序访问设备的接口,它是操作系统中的一个特殊文件。
设备文件的创建需要通过设备号和驱动程序的注册函数来完成。
设备操作函数编写设备操作函数是设备驱动程序的核心部分,它包括设备打开、设备关闭、读和写等操作。
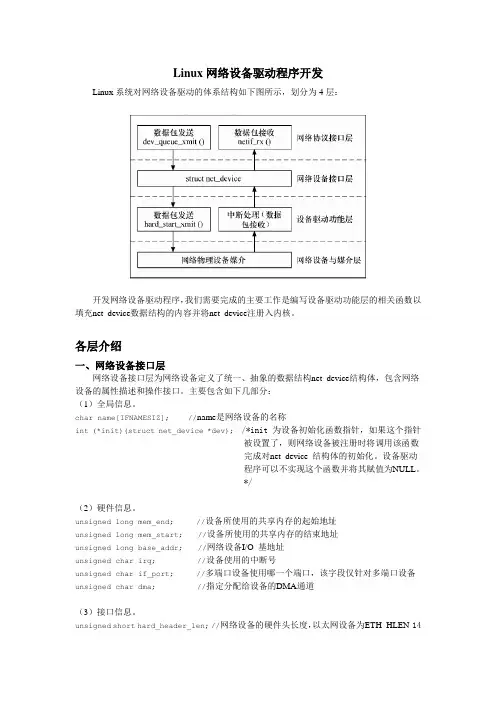
Linux网络设备驱动程序开发Linux系统对网络设备驱动的体系结构如下图所示,划分为4层:开发网络设备驱动程序,我们需要完成的主要工作是编写设备驱动功能层的相关函数以填充net_device数据结构的内容并将net_device注册入内核。
各层介绍一、网络设备接口层网络设备接口层为网络设备定义了统一、抽象的数据结构net_device结构体,包含网络设备的属性描述和操作接口。
主要包含如下几部分:(1)全局信息。
char name[IFNAMESIZ]; //name是网络设备的名称int (*init)(struct net_device *dev); /*init 为设备初始化函数指针,如果这个指针被设置了,则网络设备被注册时将调用该函数完成对net_device 结构体的初始化。
设备驱动程序可以不实现这个函数并将其赋值为NULL。
*/(2)硬件信息。
unsigned long mem_end; //设备所使用的共享内存的起始地址unsigned long mem_start; //设备所使用的共享内存的结束地址unsigned long base_addr; //网络设备I/O 基地址unsigned char irq; //设备使用的中断号unsigned char if_port; //多端口设备使用哪一个端口,该字段仅针对多端口设备unsigned char dma; //指定分配给设备的DMA通道(3)接口信息。
unsigned short hard_header_len; //网络设备的硬件头长度,以太网设备为ETH_HLEN-14unsigned short type; //接口的硬件类型unsigned mtu; //最大传输单元(MTU)unsigned char dev_addr[MAX_ADDR_LEN]; //存放设备的硬件地址unsigned char broadcast[MAX_ADDR_LEN]; /*存放设备的广播地址, 以太网设备的广播地址为6个0xFF。
发信人: olly (剑胆琴心), 信区: Linux标题: LINUX下的设备驱动程序三、UNIX系统下的设备驱动程序3.1、UNIX下设备驱动程序的基本结构在UNIX系统里,对用户程序而言,设备驱动程序隐藏了设备的具体细节,对各种不同设备提供了一致的接口,一般来说是把设备映射为一个特殊的设备文件,用户程序可以象对其它文件一样对此设备文件进行操作。
UNIX对硬件设备支持两个标准接口:块特别设备文件和字符特别设备文件,通过块(字符)特别设备文件存取的设备称为块(字符)设备或具有块(字符)设备接口。
块设备接口仅支持面向块的I/O操作,所有I/O操作都通过在内核地址空间中的I/O缓冲区进行,它可以支持几乎任意长度和任意位置上的I/O请求,即提供随机存取的功能。
字符设备接口支持面向字符的I/O操作,它不经过系统的快速缓存,所以它们负责管理自己的缓冲区结构。
字符设备接口只支持顺序存取的功能,一般不能进行任意长度的I/O请求,而是限制I/O请求的长度必须是设备要求的基本块长的倍数。
显然,本程序所驱动的串行卡只能提供顺序存取的功能,属于是字符设备,因此后面的讨论在两种设备有所区别时都只涉及字符型设备接口。
设备由一个主设备号和一个次设备号标识。
主设备号唯一标识了设备类型,即设备驱动程序类型,它是块设备表或字符设备表中设备表项的索引。
次设备号仅由设备驱动程序解释,一般用于识别在若干可能的硬件设备中,I/O请求所涉及到的那个设备。
设备驱动程序可以分为三个主要组成部分:(1) 自动配置和初始化子程序,负责检测所要驱动的硬件设备是否存在和是否能正常工作。
如果该设备正常,则对这个设备及其相关的、设备驱动程序需要的软件状态进行初始化。
这部分驱动程序仅在初始化的时候被调用一次。
(2) 服务于I/O请求的子程序,又称为驱动程序的上半部分。
调用这部分是由于系统调用的结果。
这部分程序在执行的时候,系统仍认为是和进行调用的进程属于同一个进程,只是由用户态变成了核心态,具有进行此系统调用的用户程序的运行环境,因此可以在其中调用sleep()等与进程运行环境有关的函数。
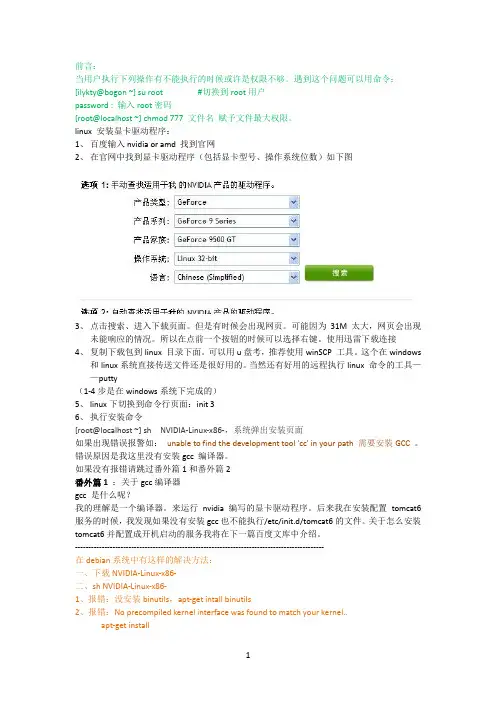
前言:当用户执行下列操作有不能执行的时候或许是权限不够。
遇到这个问题可以用命令:[ilykty@bogon ~] su root #切换到root用户password : 输入root密码[root@localhost ~] chmod 777 文件名赋予文件最大权限。
linux 安装显卡驱动程序:1、百度输入nvidia or amd 找到官网2、在官网中找到显卡驱动程序(包括显卡型号、操作系统位数)如下图3、点击搜索、进入下载页面。
但是有时候会出现网页。
可能因为31M太大,网页会出现未能响应的情况。
所以在点前一个按钮的时候可以选择右键。
使用迅雷下载连接4、复制下载包到linux 目录下面。
可以用u盘考,推荐使用winSCP 工具。
这个在windows和linux系统直接传送文件还是很好用的。
当然还有好用的远程执行linux 命令的工具——putty(1-4步是在windows系统下完成的)5、linux下切换到命令行页面:init 36、执行安装命令[root@localhost ~] sh NVIDIA-Linux-x86-,系统弹出安装页面如果出现错误报警如:unable to find the development tool 'cc' in your path 需要安装GCC 。
错误原因是我这里没有安装gcc 编译器。
如果没有报错请跳过番外篇1和番外篇2番外篇1:关于gcc编译器gcc 是什么呢?我的理解是一个编译器。
来运行nvidia 编写的显卡驱动程序。
后来我在安装配置tomcat6服务的时候,我发现如果没有安装gcc也不能执行/etc/init.d/tomcat6的文件。
关于怎么安装tomcat6并配置成开机启动的服务我将在下一篇百度文库中介绍。
---------------------------------------------------------------------------------------------在debian系统中有这样的解决方法:一、下载NVIDIA-Linux-x86-二、sh NVIDIA-Linux-x86-1、报错:没安装binutils,apt-get intall binutils2、报错:No precompiled kernel interface was found to match your kernel..apt-get install3、上一步安装后仍然报错,继续往下走:unable to find the development tool 'cc' in your path;please make sure that you have the package 'gcc' installed.If gcc is installed on your system,then please check that 'cc' is in your PATH.apt-get install gcc4、unable to find the development tool 'make' in your path……apt-get install make5、继续:The compiler used to compile the kernel (gcc 4.1) does not exactly match thecurrent compiler (gcc 4.2). The Linux 2.6 kernel module loader rejects kernel modules built with a version of gcc that does not exactly match that of the compiler used to build the running kernel.---------------------------------------------------------------------------------------------------------------------但是我的并不是德班的系统。
linux设备驱动程序--sysfs⽤户接⼝的使⽤linux sysfs⽂件系统本⽂部分内容参考⾃⾃2.6版本开始,linux内核开始使⽤sysfs⽂件系统,它的作⽤是将设备和驱动程序的信息导出到⽤户空间,⽅便了⽤户读取设备信息,同时⽀持修改和调整。
与ext系列和fat等⽂件系统不同的是,sysfs是⼀个系统在启动时构建在内存中虚拟⽂件系统,⼀般被挂载在/sys⽬录下,既然是存储在内存中,⾃然掉电不保存,不能存储⽤户数据。
事实上,在之前也有同样的虚拟⽂件系统建⽴了内核与⽤户系统信息的交互,它就是procfs,但是procfs并⾮针对设备和驱动程序,⽽是针对整个内核信息的抽象接⼝。
所以,内核开发⼈员觉得有必要使⽤⼀个独⽴的抽象接⼝来描述设备和驱动信息,毕竟直到⽬前,驱动代码在内核代码中占⽐⾮常⼤,内容也是⾮常庞杂。
这样可以避免procfs的混乱,⼦系统之间的分层和分离总是能带来更清晰地框架。
sysfs的默认⽬录结构上⽂中提到,sysfs⼀般被挂载在/sys⽬录下,我们可以通过ls /sys来查看sysfs的内容:block bus class dev devices firmware fs kernel module power⾸先需要注意的是,sysfs⽬录下的各个⼦⽬录中存放的设备信息并⾮独⽴的,我们可以看成不同的⽬录是从不同的⾓度来描述某个设备信息。
⼀个设备可能同时有多个属性,所以对于同⼀个驱动设备,同时存在于不同的⼦⽬录下,例如:在之前的章节中,我们使⽤create_dev_node.c编译出create_dev_node.ko模块,加载完成之后,我们可以在/sys下⾯看到当前驱动相关的⽬录:/sys/module/create_device_node//sys/class/basic_class/basic_demo (basic class为驱动程序中创建的class名称,basic_demo为设备名)/sys/devices/virtual/basic_class/basic_demo (basic class为驱动程序中创建的class名称,basic_demo为设备名)理解了这个概念,我们再来简览/sys各⽬录的功能:/sys/block:该⼦⽬录包含在系统上发现的每个块设备的⼀个符号链接。
linux设备驱动程序的设计与实现
Linux设备驱动程序的设计与实现是一个涉及底层系统编程和硬件交互的复杂过程。
下面是一个简单的步骤指南,以帮助你开始设计和实现Linux设备驱动程序:
1. 了解硬件:首先,你需要熟悉你要驱动的硬件设备的规格和特性。
这包括硬件的内存空间、I/O端口、中断请求等。
2. 选择驱动程序模型:Linux支持多种设备驱动程序模型,包括字符设备、块设备、网络设备等。
根据你的硬件设备和需求,选择合适的驱动程序模型。
3. 编写Makefile:Makefile是一个文本文件,用于描述如何编译和链接你的设备驱动程序。
它告诉Linux内核构建系统如何找到并编译你的代码。
4. 编写设备驱动程序:在Linux内核源代码树中创建一个新的驱动程序模块,并编写相应的C代码。
这包括设备注册、初始化和卸载函数,以及支持读写和配置硬件的函数。
5. 测试和调试:编译你的设备驱动程序,并将其加载到运行中的Linux内核中。
使用各种测试工具和方法来验证驱动程序的正确性和稳定性。
6. 文档和发布:编写清晰的文档,描述你的设备驱动程序的用途、用法和已知问题。
发布你的代码以供其他人使
用和改进。
linux视频v4l2驱动接口文档以下是为大家整理的linux视频v4l2驱动接口文档的相关范文,本文关键词为linux,视频,v4l2,驱动,接口,文档,V4L,V4L,您可以从右上方搜索框检索更多相关文章,如果您觉得有用,请继续关注我们并推荐给您的好友,您可以在教育文库中查看更多范文。
V4L与V4L2是Linux下开发视频采集设备驱动程序的一套规范,为驱动程序的开发提供了清晰的模型和统一的接口。
即使视频设备千差万别,应用程序仍可使用统一的ApI函数来进行操作。
这就极大简化了视频系统的开发和维护,给驱动程序人员带来了极大方便。
V4L2相比于V4L有更好的扩展性和灵活性,V4L2对V4L进行了彻底的改造,因而两者并不兼容。
V4L2相比较V4L的最大优势是可以自定义设备驱动缓存数量,支持的硬件设备更多。
V4L2最早出现在linux2.5.x版本中,Linux2.6发行版之后采用规范大多是V4L2。
应用程序处于最上层,V4L或V4L2处于中间层,而实际的硬件设备处于下层。
v4l2捕获的数据,最初是存放在内核空间,用户不能直接访问该段内存,必须通过某些手段来转换地址。
一共有三种方式获取内核空间数据:使用read、write方式;内存映射方式和用户指针模式。
read、write方式,在用户空间和内核空间不断拷贝数据,占用了大量用户内存空间,效率不高。
内存映射方式:把设备里的内存映射到应用程序中的内存控件,直接处理设备内存,这是一种有效的方式。
用户指针模式:内存片段由应用程序自己分配。
这点需要在v4l2_requestbuffers里将memory字段设置成V4L2_memoRY_useRpTR。
V4L2在视频采集中两个重要的系统调用是ioctl()和mmap(),ioctl 系统调用对设备的I/o通道进行控制,mmap()系统调用使得内核地址映射到用户地址空间,进程可以直接读写内存,不需要任何数据的拷贝,不必再调用read(),write()等操作,加速了I/o访问。
linux 驱动的ioctl 详细说明摘要:1.引言2.IOCTL的含义和作用3.Linux驱动的IOCTL实现4.IOCTL操作步骤详解5.常用IOCTL命令举例6.总结正文:【引言】在Linux系统中,设备驱动程序是操作系统与硬件设备之间进行通信的重要桥梁。
为了实现对硬件设备的控制和管理,驱动程序提供了一系列命令,其中IOCTL(Input/Output Control,输入输出控制)是最常用的一种。
本文将对Linux驱动的IOCTL进行详细说明,帮助读者更好地理解和使用这一功能。
【IOCTL的含义和作用】IOCTL是Linux系统中设备驱动程序的一个重要接口,允许用户空间进程与驱动程序进行通信,从而实现对硬件设备的控制。
通过IOCTL,用户可以设置设备的工作模式、读取设备状态等信息,也可以请求驱动程序执行特定的操作。
总的来说,IOCTL在操作系统和硬件设备之间扮演了一个命令传递和控制的角色。
【Linux驱动的IOCTL实现】在Linux中,驱动程序的IOCTL实现通常包括以下几个步骤:1.打开设备文件:用户空间进程通过open()系统调用打开设备文件,获取设备的文件描述符。
2.发送IOCTL命令:用户空间进程通过IOCTL()系统调用向驱动程序发送命令。
IOCTL()系统调用接受两个参数,一个是设备文件描述符,另一个是IOCTL命令。
3.驱动程序处理IOCTL命令:驱动程序收到IOCTL命令后,根据命令类型执行相应的操作。
这些操作可能包括设置设备状态、读取设备数据、执行自定义操作等。
4.返回结果:驱动程序处理完IOCTL命令后,将结果返回给用户空间进程。
结果可以通过read()或ioctl()系统调用读取。
【IOCTL操作步骤详解】以下是一个简单的IOCTL操作示例:1.打开设备文件:```cint fd = open("/dev/mydevice", O_RDONLY);```2.发送IOCTL命令:```cioctl(fd, MY_IOCTL_COMMAND, param);```3.驱动程序处理IOCTL命令:在驱动程序中,可以通过以下方式接收IOCTL命令:```cstatic int my_ioctl(struct file *file, unsigned int cmd, unsigned long arg){switch (cmd) {case MY_IOCTL_COMMAND:// 处理IOCTL命令的逻辑break;default:return -EINVAL;}// 执行命令相关操作return 0;}```4.返回结果:驱动程序处理完IOCTL命令后,将结果返回给用户空间进程。
linux驱动注册流程Linux驱动注册流程是指在Linux操作系统中,将设备驱动程序注册到系统中的一系列步骤。
以下是一个详细的流程介绍,分为四个主要步骤。
第一步:分配和初始化设备结构体Linux内核通过设备结构体(dev_t)来描述设备,该结构体储存了设备的主设备号和次设备号。
首先,我们需要使用`alloc_chrdev_region(`函数来为设备分配设备号;然后,通过`cdev_init(`函数来对设备结构体进行初始化,包括初始化file_operations结构体、注册字符设备并设置设备操作函数。
第二步:添加字符设备到系统第二步需要使用`cdev_add(`函数将驱动程序的字符设备添加到系统中。
此函数会将驱动程序添加到内核的字符设备列表中,并为驱动程序分配一个主设备号。
驱动程序将会在此处与系统中的其他字符设备进行关联。
第三步:创建设备节点为了让用户空间能够与驱动程序进行交互,我们需要在/dev目录下创建一个设备节点。
设备节点是与驱动程序相关联的特殊文件,用户可以通过读写这些文件来与驱动程序进行通信。
创建设备节点可以使用`mknod`命令或`udev`来完成。
第四步:初始化设备最后一步是在驱动程序中初始化驱动程序特定的设备。
这个过程包括初始化设备的硬件和设置设备的特性。
例如,可以设置设备的中断处理程序、初始化设备的寄存器等。
总结以上是Linux驱动注册的大致流程。
这个过程涉及到内核级的操作和用户空间级的操作,并需要一定的了解和熟悉Linux内核编程、设备驱动开发和设备节点的创建等知识。
通过正确的执行这些步骤,我们可以将设备驱动程序成功地注册到Linux操作系统中,从而实现设备和系统的交互。
前言:当用户执行下列操作有不能执行的时候或许是权限不够。
遇到这个问题可以用命令:[ilykty@bogon ~] su root #切换到root用户password : 输入root密码[root@localhost ~] chmod 777 文件名赋予文件最大权限。
linux 安装显卡驱动程序:1、百度输入nvidia or amd 找到官网2、在官网中找到显卡驱动程序(包括显卡型号、操作系统位数)如下图3、点击搜索、进入下载页面。
但是有时候会出现网页。
可能因为31M太大,网页会出现未能响应的情况。
所以在点前一个按钮的时候可以选择右键。
使用迅雷下载连接4、复制下载包到linux 目录下面。
可以用u盘考,推荐使用winSCP 工具。
这个在windows和linux系统直接传送文件还是很好用的。
当然还有好用的远程执行linux 命令的工具——putty(1-4步是在windows系统下完成的)5、linux下切换到命令行页面:init 36、执行安装命令[root@localhost ~] sh NVIDIA-Linux-x86-173.14.18-pkg1.run,系统弹出安装页面如果出现错误报警如:unable to find the development tool 'cc' in your path 需要安装GCC 。
错误原因是我这里没有安装gcc 编译器。
如果没有报错请跳过番外篇1和番外篇2番外篇1:关于gcc编译器gcc 是什么呢?我的理解是一个编译器。
来运行nvidia 编写的显卡驱动程序。
后来我在安装配置tomcat6服务的时候,我发现如果没有安装gcc也不能执行/etc/init.d/tomcat6的文件。
关于怎么安装tomcat6并配置成开机启动的服务我将在下一篇百度文库中介绍。
---------------------------------------------------------------------------------------------在debian系统中有这样的解决方法:一、下载NVIDIA-Linux-x86-173.14.18-pkg1.run二、sh NVIDIA-Linux-x86-173.14.18-pkg1.run1、报错:没安装binutils,apt-get intall binutils2、报错:No precompiled kernel interface was found to match your kernel..apt-get install3、上一步安装后仍然报错,继续往下走:unable to find the development tool 'cc' in your path;please make sure that you have the package 'gcc' installed.If gcc is installed on your system,then please check that 'cc' is in your PATH.apt-get install gcc4、unable to find the development tool 'make' in your path……apt-get install make5、继续:The compiler used to compile the kernel (gcc 4.1) does not exactly match thecurrent compiler (gcc 4.2). The Linux 2.6 kernel module loader rejects kernel modules built with a version of gcc that does not exactly match that of the compiler used to build the running kernel.---------------------------------------------------------------------------------------------------------------------但是我的并不是德班的系统。