永大电梯故障代码分析表
- 格式:doc
- 大小:2.59 MB
- 文档页数:89
U V W制櫃入電子台馬達源端台版次TCD 故障等级内容HOLD54 A1 RE故障(U,V,W相磁极角度异常)◎检出目的在PM马达控制中,变频控制器,利用编码器(ENCODER)uvw信号,来判断PM马达磁极所在位置,进一步送出正确的三相电压以产生一旋转磁场。
若编码器中任意一相以上损坏,将导致控制器送出的旋转磁场无法与马达磁极位置吻合,而造成马达运转不顺畅,让电梯产生晃动,此时应立即时停机。
检出条件1。
Rotary Encoder的磁极检出Plus全部为HI,且持续检出1.37ms以上,则立即停止运转,且不可再起动。
2。
Rotary Encoder的磁极检出Plus全部为LO,且持续检出1.37ms以上,则立即停止运转,且不可再起动.注1。
13. Rotary Encoder编码顺序不正常,且持续检出1.37ms以上,则立即停止运转,且不可再起动。
复归方式故障排除,FFB切OFF—ON后,操作MODE 2清除TCD,方能恢复运转。
调查项目:1。
检查uvw之LED灯号是否正常。
2。
检查ENCODER有无损坏〈下图〉,若损坏请更换ENCODER,若无请检查第二项。
观看编码器是否波型正常量测讯号版次3.检查U79 (AM26LS32AC) 有无损坏〈下图〉U79 (AM26LS32AC)版次TCD 故障等级 内 容 HOLD 55 A1马达电流检出回路异常◎检出目的本故障的检出目的及条件分为以下三种:1、避免HCT 长久使用损坏或Switching Power 之5V 电压异常下,使零点偏移(亦及电流为零时DSP 输入信号电压不为2。
5V 与DSP A/D 参考电压不为5V)。
此时CPU 读入电流回授信号将不正确,而造成马达运转不顺畅,让电梯产生晃动,此时电梯不应再次走行。
2、避免HCT 长久使用损坏或Switching Power 之P15V 电压异常下,而造成IPM 烧毁.3、马达UVW 动力线缺相检出:当马达动力线出现缺相时,特别是马达出力较小时,电梯仍可运转,但会出现晃动。

U V W制櫃入電子台馬達源端台版次TCD 故障等级内容HOLD54 A1 RE故障(U,V,W相磁极角度异常) ◎检出目的在PM马达控制中,变频控制器,利用编码器(ENCODER)uvw信号,来判断PM马达磁极所在位置,进一步送出正确的三相电压以产生一旋转磁场。
若编码器中任意一相以上损坏,将导致控制器送出的旋转磁场无法与马达磁极位置吻合,而造成马达运转不顺畅,让电梯产生晃动,此时应立即时停机。
检出条件1.Rotary Encoder的磁极检出Plus全部为HI,且持续检出1.37ms以上,则立即停止运转,且不可再起动。
2.Rotary Encoder的磁极检出Plus全部为LO,且持续检出1.37ms以上,则立即停止运转,且不可再起动。
注1.13. Rotary Encoder编码顺序不正常,且持续检出1.37ms以上,则立即停止运转,且不可再起动。
复归方式故障排除,FFB切OFF-ON后,操作MODE 2清除TCD,方能恢复运转。
调查项目:1.检查uvw之LED灯号是否正常。
2.检查ENCODER有无损坏〈下图〉,若损坏请更换ENCODER,若无请检查第二项。
观看编码器是否波型正常量测讯号版次3.检查U79 (AM26LS32AC) 有无损坏〈下图〉U79 (AM26LS32AC)版次TCD 故障等级 内 容 HOLD 55A1马达电流检出回路异常◎检出目的 本故障的检出目的及条件分为以下三种:1、避免HCT 长久使用损坏或Switching Power 之5V 电压异常下,使零点偏移(亦及电流为零时DSP 输入信号电压不为2.5V 与DSP A/D 参考电压不为5V)。
此时CPU 读入电流回授信号将不正确,而造成马达运转不顺畅,让电梯产生晃动,此时电梯不应再次走行。
2、避免HCT 长久使用损坏或Switching Power 之P15V 电压异常下,而造成IPM 烧毁。
3、马达UVW 动力线缺相检出:当马达动力线出现缺相时,特别是马达出力较小时,电梯仍可运转,但会出现晃动。
U V W制櫃入電子台馬達源端台版次TCD 故障等级内容HOLD54 A1 RE故障(U,V,W相磁极角度异常)◎检出目的在PM马达控制中,变频控制器,利用编码器(ENCODER)uvw信号,来判断PM马达磁极所在位置,进一步送出正确的三相电压以产生一旋转磁场。
若编码器中任意一相以上损坏,将导致控制器送出的旋转磁场无法与马达磁极位置吻合,而造成马达运转不顺畅,让电梯产生晃动,此时应立即时停机。
检出条件1。
Rotary Encoder的磁极检出Plus全部为HI,且持续检出1.37ms以上,则立即停止运转,且不可再起动。
2。
Rotary Encoder的磁极检出Plus全部为LO,且持续检出1.37ms以上,则立即停止运转,且不可再起动.注1。
13. Rotary Encoder编码顺序不正常,且持续检出1.37ms以上,则立即停止运转,且不可再起动。
复归方式故障排除,FFB切OFF—ON后,操作MODE 2清除TCD,方能恢复运转。
调查项目:1。
检查uvw之LED灯号是否正常。
2。
检查ENCODER有无损坏〈下图〉,若损坏请更换ENCODER,若无请检查第二项。
观看编码器是否波型正常量测讯号版次3.检查U79 (AM26LS32AC) 有无损坏〈下图〉U79 (AM26LS32AC)版次TCD 故障等级 内 容 HOLD 55 A1马达电流检出回路异常◎检出目的本故障的检出目的及条件分为以下三种:1、避免HCT 长久使用损坏或Switching Power 之5V 电压异常下,使零点偏移(亦及电流为零时DSP 输入信号电压不为2。
5V 与DSP A/D 参考电压不为5V)。
此时CPU 读入电流回授信号将不正确,而造成马达运转不顺畅,让电梯产生晃动,此时电梯不应再次走行。
2、避免HCT 长久使用损坏或Switching Power 之P15V 电压异常下,而造成IPM 烧毁.3、马达UVW 动力线缺相检出:当马达动力线出现缺相时,特别是马达出力较小时,电梯仍可运转,但会出现晃动。
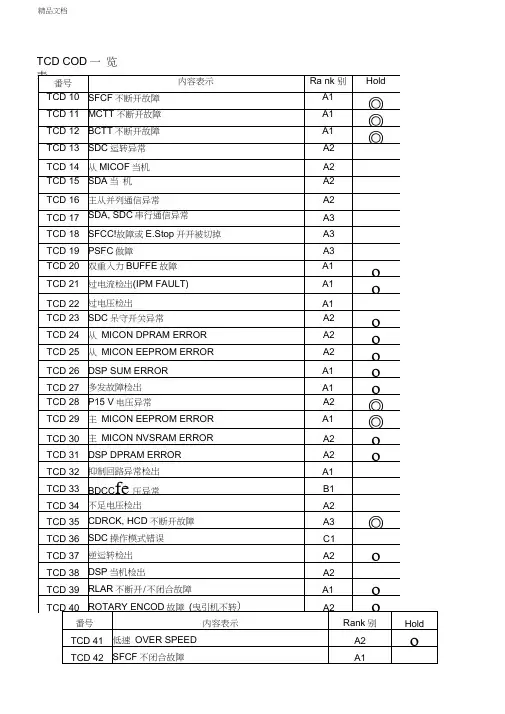
精品文档TCD COD一览◎:故障排除,主电源开关切OFF-Oh后,操作MODE 2青除TCD方能恢复运转。
故障排除,操作MODE 2青除TCD或主电源开关切OFF-Oh后,方能恢复运转1.SDCGB PC电源检查:(1) SDCGB PC之P5 LED是否点亮(点亮/正常)。
(2) SDCGB PCB之P22 LED是否点亮(点亮/正常)。
(3) 确认SDCGB PC上之P5V与P22V电压是否正常。
2. SDA通信用Cage RX LED检查:(1) LED灯不亮;检查MPUGB PCBU34 IC是否插妥、Cable有无断线。
⑵LED灯微亮;接收正常。
(3) LED灯明亮;TX戯与RX线反接。
3.SDA SD(通信线断线检查:通信Cable有无断线或接触不良。
4. 以上各项正常,请更换SDCGB PCB5.SDCGB PC更换后仍无法正常运转,更换MPUGB PCB1. TCD 19也有检出时,直接以TCD 19调查,下列第2〜6项免调查。
2. TCD 19没有检出时轿顶停止开关、轿内停止开关被切掉、轿顶 PLS 是否动作确认。
3. FI0GB PCBh 之SFCCK LE 是否入力(点亮—入力、熄灭—未入力)。
4. MPUGB PC 与FIOR PCB> 间排线;MU 及FOD Connec 有无接触不良 Check 。
5. 以上各项正常,更换FIOGB PCB6. MPUGB PC 更换FIOGB PC 更新后,仍有异常发生,表示 MPUGB PCB 良,请更换MPUGB PCBSkeletonTCD 故障等级 内 容HOLD19A3PSFC 做障 —检出目的 PSFCI 之安全回路,因异常而未入力,电梯禁止运转,提高制御系统的信赖性。
检出条件当PSFCK 安全回路,因FLS 限速器、逃生孔等安全装置动作而未入力,则检出异 常。
复归方式故障排除后,可自动恢复运转。
UAY1轿厢工作平台 Lock 装置轿内轿顶调查项目:1. FLS、GRS MHS SC是否动作确认。
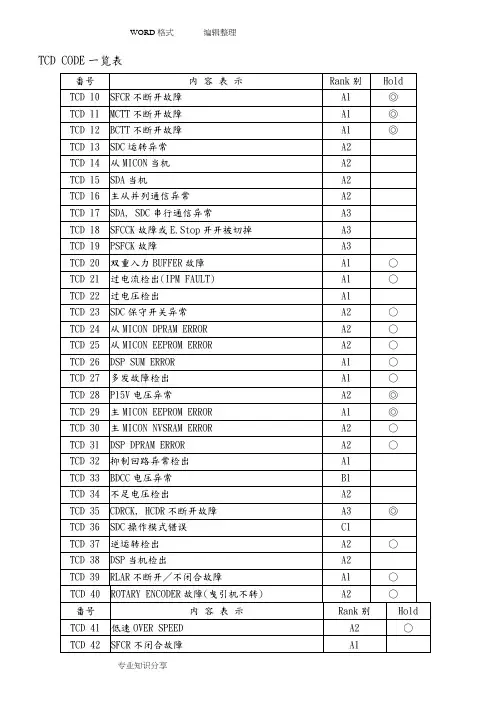
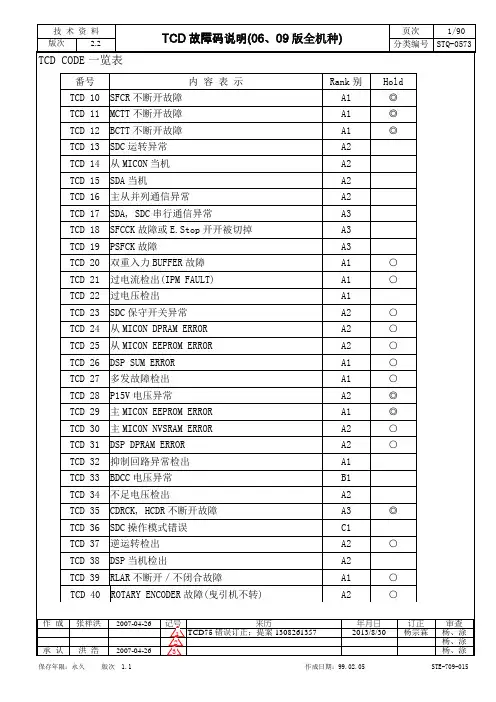
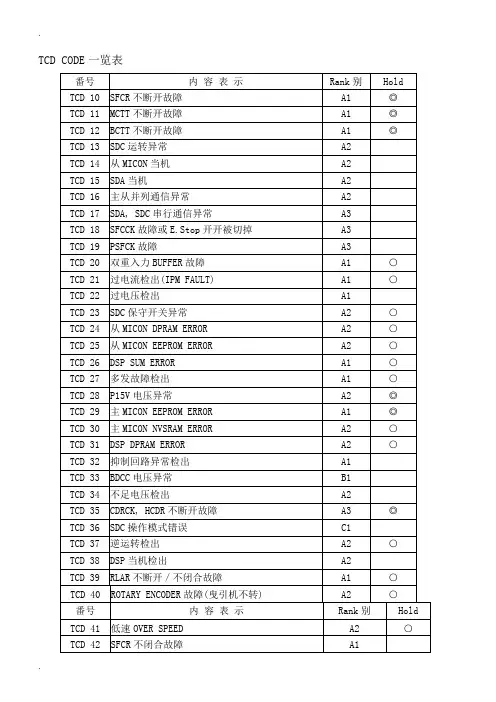
文档收集于互联网,已重新整理排版.word版本可编辑.欢迎下载支持. 【关键字】情况、方法、条件、动力、问题、平衡、项目、标准、设置、关切、调整TCD CODE一览表◎:故障排除,主电源开关切OFF-ON后,操作MODE 2清除TCD,方能恢复运转。
检出目的 在PM 马达控制中,变频控制器,利用编码器(ENCODER)uvw 信号,来判断PM 马达磁极所在位置,进一步送出正确的三相电压以产生一旋转磁场。
若编码器中任意 一相以上损坏,将导致控制器送出的旋转磁场无法与马达磁极位置吻合,而造成马达运转不顺畅,让电梯产生晃动,此时应立即时停机。
检出条件 1.Rotary Encoder 的磁极检出Plus 全部为HI ,且持续检出1.37ms 以上,则立即停止运转,且不可再起动。
2.Rotary Encoder 的磁极检出Plus 全部为LO ,且持续检出1.37ms 以上,则立即停止运转,且不可再起动。
注1.13. Rotary Encoder 编码顺序不正常,且持续检出1.37ms 以上,则立即停止运转,且不可再起动。
复归方式 故障排除,FFB 切OFF-ON 后,操作MODE 2清除TCD ,方能恢复运转。
调查项目:1.检查uvw 之LED 灯号是否正常。
2.检查ENCODER 有无损坏〈下图〉,若损坏请更换ENCODER ,若无请检查第二项。
3.检查U79 (AM26LS32AC) 有无损坏〈下图〉TCD 故障等级 内 容 HOLD观看编码器是否波型正常 量测讯号55 A1 马达电流检出回路异常◎检出目的 本故障的检出目的及条件分为以下三种:1、避免HCT 长久使用损坏或Switching Power 之5V 电压异常下,使零点偏移(亦及电流为零时DSP 输入信号电压不为2.5V 与DSP A/D 参考电压不为5V)。
此时CPU读入电流回授信号将不正确,而造成马达运转不顺畅,让电梯产生晃动,此时电梯不应再次走行。
永大电梯故障代码分析表本页仅作为文档封面,使用时可以删除This document is for reference only-rar21year.MarchTCD CODE一览表◎:故障排除,主电源开关切OFF-ON后,操作MODE 2清除TCD,方能恢复运转。
○:故障排除,操作MODE 2清除TCD或主电源开关切OFF-ON后,方能恢复运转。
调查项目:1.入力Buffer有无ON故障Check:主MXMCCT ($CA02)、从SXMCCT ($CD22)其Data是否随着MCTT主接触器之ON-OFF同步动作。
※MXMCCT ($CA02)、SXMCCT ($CD22)皆操作 MODE 22 观察。
主接触器的电压Check:(1) MCTT主接触器用电源;RECT FUSE与GD之间电压→ DC 48V。
(2) MYMCCT ON时,MCTT主接触器COIL()端与COIL()端之间电压→ DC 48V。
(3)停止中,且开门状态下,MCTT主接触器COIL()端与GD48之间电压→ DC 48V。
主接触器状态Check:MCTT主接触器卡住,接点曲折、熔着,配线短路等确认。
PCB与FIOGB PCB之间排线;MUD及FOD Connect有无接触不良Check。
PCB更换第1项或第2项有状况,而第4项良好时,表示FIOGB出力Buffer不良,更换FIOGB PCB。
PCB更换更换FIOGB PCB后,仍有异常发生,表示MPUGB PCB不良,更换MPUGB PCB。
调查项目:1.入力Buffer有无ON故障Check:主MXBCTT ($CA00)、从SXBCTT($CD20)其Data是否随着BCTT接触器之ON-OFF同步动作。
※MXBCTT ($CA00)、SXBCTT ($CD20)皆操作 MODE 22 观察。
接触器的电压Check:(1)BCTT接触器用电源;RECT FUSE与GD之间电压→ DC 48V。
永大电梯故障代码分析表(总89页)-CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除TCD CODE一览表◎:故障排除,主电源开关切OFF-ON后,操作MODE 2清除TCD,方能恢复运转。
○:故障排除,操作MODE 2清除TCD或主电源开关切OFF-ON后,方能恢复运转。
U V W控制櫃馬輸入電源子台櫃馬達電源端子台54 A1 RE故障(U,V,W相磁极角度异常) ◎检出目的在PM马达控制中,变频控制器,利用编码器(ENCODER)uvw信号,来判断PM马达磁极所在位置,进一步送出正确的三相电压以产生一旋转磁场。
若编码器中任意一相以上损坏,将导致控制器送出的旋转磁场无法与马达磁极位置吻合,而造成马达运转不顺畅,让电梯产生晃动,此时应立即时停机。
检出条件1.Rotary Encoder的磁极检出Plus全部为HI,且持续检出1.37ms以上,则立即停止运转,且不可再起动。
2.Rotary Encoder的磁极检出Plus全部为LO,且持续检出1.37ms以上,则立即停止运转,且不可再起动。
注1.13. Rotary Encoder编码顺序不正常,且持续检出1.37ms以上,则立即停止运转,且不可再起动。
复归方式故障排除,FFB切OFF-ON后,操作MODE 2清除TCD,方能恢复运转。
调查项目:1.检查uvw之LED灯号是否正常。
2.检查ENCODER有无损坏〈下图〉,若损坏请更换ENCODER,若无请检查第二项。
观看编码器是否波型正常量测讯号U79 (AM26LS32AC)TCD 故障等级内容HOLD55 A1 马达电流检出回路异常 ◎ 检出目的 本故障的检出目的及条件分为以下三种:1、避免HCT 长久使用损坏或Switching Power 之5V 电压异常下,使零点偏移(亦及电流为零时DSP 输入信号电压不为2.5V 与DSP A/D 参考电压不为5V)。
TCD CODE一览表
◎:故障排除,主电源开关切OFF-ON后,操作MODE 2清除TCD,方能恢复运转。
○:故障排除,操作MODE 2清除TCD或主电源开关切OFF-ON后,方能恢复运转。
U V W
控制櫃馬
輸入電源子台
櫃馬達電源端
子台
54A1RE故障(U,V,W相磁极角度异常)◎
检出目的
在PM马达控制中,变频控制器,利用编码器(ENCODER)uvw信号,来判断PM马
达磁极所在位置,进一步送出正确的三相电压以产生一旋转磁场。
若编码器中任意
一相以上损坏,将导致控制器送出的旋转磁场无法与马达磁极位置吻合,而造成马
达运转不顺畅,让电梯产生晃动,此时应立即时停机。
检出条件
Encoder的磁极检出Plus全部为HI,且持续检出以上,则立即停止运转,且不可再起动。
Encoder的磁极检出Plus全部为LO,且持续检出以上,则立即停止运转,且不可再起动。
注
3. Rotary Encoder编码顺序不正常,且持续检出以上,则立即停止运转,且
不可再起动。
复归方式故障排除,FFB切OFF-ON后,操作MODE 2清除TCD,方能恢复运转。
调查项目:
1.检查uvw之LED灯号是否正常。
2.检查ENCODER有无损坏〈下图〉,若损坏请更换ENCODER,若无请检查第二项。
观看编码器是否波
型正常
量测讯号
检出目的 本故障的检出目的及条件分为以下三种:
1、避免HCT 长久使用损坏或Switching Power 之5V 电压异常下,使零点偏移(亦及
电流为零时DSP 输入信号电压不为与DSP A/D 参考电压不为5V)。
此时CPU 读入电
流回授信号将不正确,而造成马达运转不顺畅,让电梯产生晃动,此时电梯不应
再次走行。
2、避免HCT 长久使用损坏或Switching
Power 之P15V 电压异常下,而造成IPM 烧毁。
3、马达UVW 动力线缺相检出:当马达动力线出现缺相时,特别是马达出力较小时,
电梯仍可运转,但会出现晃动。
此时电梯不应再走行。
4、马达过载保护(自U36版本在DSPSB2P2以上的版本具有此功能)
检出条件 1、马达停机之后,检测无运转情况下,HCT 回授值不可超过〝HCT 零点回授错误侦测
极限值〞300mv 。
此故障在停止时检出。
2、OE 信号启动后,马达电流开始输出,后,电流回授一直小于设定值。
此故障在启
动时检出,马达未转动。
3、马达三相电流不平衡超出检出阀值,只在马达启动时设置的几个。
此故障在启动
时检出,马达已转动。
4、马达过载检出(I^2*t )
复归方式 故障排除,FFB 切OFF-ON 后,操作MODE 2清除TCD ,方能恢复运转。
一、检出条件1的故障(在电梯停止时检出) 的调查项目:
1.确认HCT 零点回授错误侦测极限值(RANGE_I_OFFSET_ERR ):
6138~6139是否设定为0800H ,此值是设定检出的阀值。
当零点漂移大于此值,就检出故障。
如将此值调大,则故障不易检出。
但电流漂移仍然存在,会影响马达运转顺畅,故不建议调大此值。
2.检查smpu 上HCT 端子之pin2与pin3,是否其电压正常(标准为±25mV)。
3. 检查smpu 上MUA 端子之pin1、5间电压,是否其电压正常 (标准为5±。
1 1
2 2
4.检查MPUGB 上TL431输出电压,是否其电压正常 (标准为± ,量测电容
(C30) 电压检测。
※HCT 零点回授之允许补偿极限值(RANGE_I_OFFSET_AMEND)请参考主机马达参数调整资料。
二、检出条件2的故障(电梯启动,10T 吸合瞬间检出)的调查项目:
1、确认HCT 电流回授错误侦测极限值615A~615B 设定是否设定为0080H 。
此值是设定检出的阀值。
当电流回授小于此值,就检出故障。
如将此值调小,则故障不易检出;设为零,则不检出此故障。
2、检查MPU 上的供电电压是否正常:
HCT 端子之pin5与pin1,是否其电压正常(标准为+15V);
HCT 端子之pin4与pin1,是否其电压正常(标准为-15V);
3、10T 动作确认:
1)市电电压确认:量测市电380V 是否太低,当市电电压过低时,10T 吸合的所需时间增加。
2)10T 接线不良或10T 本体不良:详见TCD52故障解说。
因这种情况下的TCD55检出较TCD52
1。