基于stm32智能除尘黑板擦
- 格式:pdf
- 大小:996.03 KB
- 文档页数:3
248 •电子技术与软件工程 Electronic Technology & Software Engineering单片机技术• SCM Technology●基金项目:大学生创新创业训练项目(20161236)资助。
【关键词】智能 STM32 无线充电随着多媒体技术的发展,课堂教学不再依赖黑板,但板书直观、简洁的特点依然不变。
目前,我国各类学校的课堂教学主要以粉笔板书为主,利用多媒体教学只在高校内盛行,大多数学校使用的仍是传统的黑板擦。
当教师用黑板擦黑板时,只有少量灰尘粘在手上,而超过95%的灰尘颗粒漂浮在空气中,并且在擦除后,黑板的表面经常会留下不易清洁的粉笔灰,造成环境的二次污染。
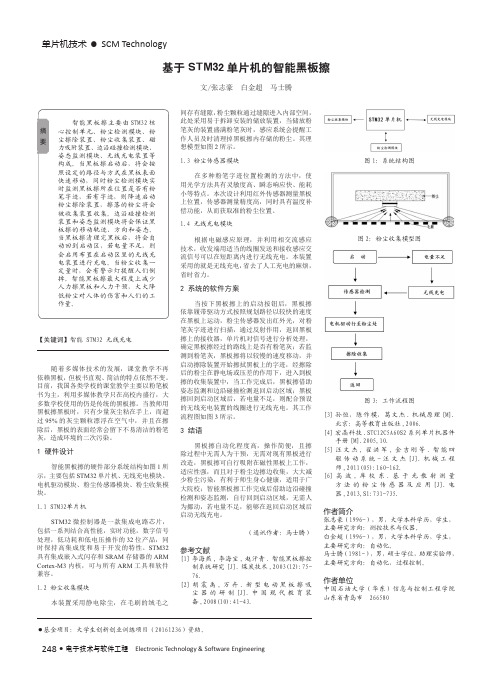
1 硬件设计智能黑板擦的硬件部分系统结构如图1所示,主要包括STM32单片机、无线充电模块、电机驱动模块、粉尘传感器模块、粉尘收集模块。
1.1 STM32单片机STM32微控制器是一款集成电路芯片,包括一系列结合高性能,实时功能,数字信号处理,低功耗和低电压操作的32位产品,同时保持高集成度和易于开发的特性。
STM32具有集成嵌入式闪存和SRAM 存储器的ARM Cortex-M3内核,可与所有ARM 工具和软件兼容。
1.2 粉尘收集模块本装置采用静电除尘,在毛刷的绒毛之基于STM32单片机的智能黑板擦文/张志豪 白金超 马士腾间存有缝隙,粉尘颗粒通过缝隙进入内部空间,此处采用易于拆卸安装的储放装置,当储放粉笔灰的装置盛满粉笔灰时,感应系统会提醒工作人员及时清理掉黑板擦内存储的粉尘。
其理想模型如图2所示。
1.3 粉尘传感器模块在多种粉笔字迹位置检测的方法中,使用光学方法具有灵敏度高、瞬态响应快、能耗小等特点。
本次设计利用红外传感器测量黑板上位置,传感器测量精度高,同时具有温度补偿功能,从而获取准的粉尘位置。
1.4 无线充电模块根据电磁感应原理,并利用相交流感应技术,收发端用适当的线圈发送和接收感应交流信号可以在短距离内进行无线充电。
基于STM32单片机智能伺服型黑板擦作者:张家源王其申常雪娇马惜平来源:《科技创新导报》2020年第03期摘; ;要:本设计基于STM32单片机,设计了自动伺服黑板擦。
系统由信息控制处理模块、驱动设计单元模块、电路电源模块、粉尘收集模块等,使擦黑板环节更高效,环境更洁净,师生更健康。
随着计算机网络科学、多媒体、人工智能等相关技术的出现与普及,为了满足广大师生对于教学设施更为符合人性化设置的高端教学需求,众多与教育相关的教学设备例如智能黑板等进而被发明和产生,这是新技术发展的趋势及方向所致。
但是现有的高端教学设备有着成本高,智能性差的缺点,特别是还存在工程量较大的问题,难以进行普及,为此我们从体积小巧的黑板擦入手,进行改进与创新。
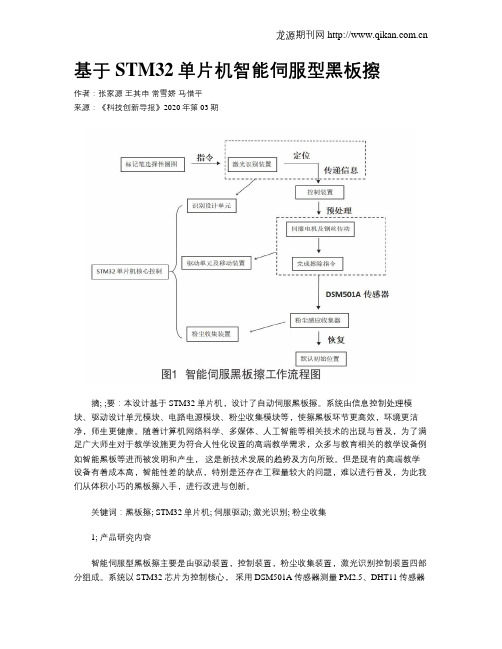
关键词:黑板擦; STM32单片机; 伺服驱动; 激光识别; 粉尘收集1; 产品研究内容智能伺服型黑板擦主要是由驱动装置,控制装置,粉尘收集装置,激光识别控制装置四部分组成。
系统以STM32芯片为控制核心,采用DSM501A传感器测量PM2.5、DHT11传感器测量温湿度、伺服驱动器驱动伺服电机控制黑板擦运动,各装置模块分行其职,配合紧密,共同完成擦除工作(见图1)。
使用者只需用特定的标记笔在黑板上的擦除区域进行选择型圈图,系统通过激光识别装置在黑板上定位,会将擦除区域信息传送至信息控制处理模块进行预处理,再将处理好的信息通过主控电路传送至驱动装置模块,然后便对黑板的特定区域进行擦除,工作的同时粉尘收集装置会对杂质粉尘进行收集。
擦拭结束后,智能黑板擦能根据预先设计的程序恢复到黑板左上角的默认初始位置。
2; 系统硬件设计2.1 识别设计单元模块黑板边缘处的X,Y轴能将黑板分割成无数个云点,用于识别设计单元模块进行定位。
运用测距原理测量光往返目标所需要时间,然后通过光速c=299792458m/s和大气折射系数n计算出距离D。
激光光束通过黑板边缘处特定装置的调制经过电子装置发射出来,遇到高速率旋转的粒子时能在光学棱镜表面发生反射,最后以一个特地的角度α返回黑板表面,这样就通过光学信息完成了对黑板表面的实况采集。

基于STM32单片机智能伺服型黑板擦随着科技的不断进步,智能化设备在我们的生活中已经变得越来越常见。
而在教育领域中,智能化设备也在不断地发挥着作用,提高了教学效率和质量。
今天我们要介绍的就是基于STM32单片机的智能伺服型黑板擦,它能够帮助老师更加轻松便捷地擦拭黑板,提高课堂效率。
下面让我们来详细了解一下这款智能黑板擦的设计和功能。
一、硬件设计1. 单片机选择在本设计中,选择了STM32单片机作为控制核心。
STM32是意法半导体公司推出的32位MCU产品系列,具有高性能、低功耗和丰富的外设资源。
它采用ARM Cortex-M内核,运行速度快,具有较高的性能,能够满足黑板擦控制系统对性能的要求。
2. 伺服电机黑板擦的移动是由伺服电机来控制的,在本设计中选择了一款小巧轻便但功率较大的伺服电机。
这款伺服电机具有稳定的控制性能和精准的位置控制能力,能够满足黑板擦的移动需求。
3. 传感器为了提高智能化程度,本设计中还加入了一些传感器,如光电传感器和超声波传感器。
光电传感器用于检测黑板擦的位置,超声波传感器用于检测黑板的位置,从而实现对黑板擦位置的自动调整。
4. 无线通信模块为了方便控制和监测黑板擦,设计中还加入了无线通信模块,可以通过手机或电脑对黑板擦进行远程控制和监测。
1. 控制算法在软件设计中,需要设计出一个稳定可靠的控制算法,来实现对黑板擦的精准控制。
这个算法需要考虑到伺服电机的特性和黑板擦的移动特点,尽量减小误差,提高精度。
2. 界面设计为了方便用户操作和监测黑板擦,设计了一个用户友好的界面,可以在手机或电脑上实时监测黑板擦的位置和状态,并且可以通过界面来控制黑板擦的移动。
三、功能特点1. 自动擦拭智能伺服型黑板擦可以根据预设的路径和时间自动擦拭整个黑板,老师只需要简单设置一下就可以让黑板擦自己完成擦拭工作,省去了反复擦拭的麻烦。
2. 自动调整位置通过传感器检测黑板和黑板擦的位置,智能伺服型黑板擦可以自动调整擦拭路径,确保每一块区域都能被擦拭到,提高了擦拭效率。
基于STM32智能板擦机器人的研究与设计摘要目前,智能家居、人工智能技术已经渗透我们生活中的方方面面,在广电、银行、电信、家居、教育等方面都有很大的发展和突破。
为此,研究出一种具有粉尘识别的智能黑板擦,以STM32单片机为其控制中心,设计板擦机器人识别粉尘、自由移动各个控制系统的有效结合,并通过STM32单片机输入的脉冲PWN波的不同加速度来控制板擦的上下、左右前进后退的动作。
本项目可以很好地延伸到其他相关方面,涉及日常生活中的很多领域,有一定的实际应用价值。
关键词服务机器人;自控;识别;STM32前言随着人工智能时代的到来,各行各业都离不开互联网产业。
互联网向传统行业渗透,实质是传统行业需要互联网。
教育行业是最具有传统行业的代表之一,然而粉笔是传播文化的工具,人类几千年文化的积淀通过粉笔相传,而粉尘灰长期会引起人体皮肤、呼吸道等身体的不适,故对自动运转的板擦机器人的需求日益明显。
因此本文设计了一种STM32智能板擦机器人,有明显的粉尘传感器、采集电路、四轮驱动机构,利用粉尘传感器实现定位,利用电机正反转原理控制板擦的上下左右的移动,实现全自动擦黑板功能,进而很好地避免了对教师身体健康的影响。
1 总体设计方案智能板擦机器人可以完成教室中人工的擦黑板的系列动作,通过机器的上下左右运动来完成黑板的擦拭,以STM32控制器为核心。
本设计的机械本体由中间运动平台、主支撑平台构和线路系统控制系构成。
其中中间运动平台主要由2根光轴、2块亚克力中间盖板及直线轴承和单边法兰轴承搭建;主支撑平台用2块不同的亚克力板和若干螺丝分别固定步进电机和铝合金到相应的槽口位置;线路装置由1块主板2个A4988驱动及其与配件构成,且本设备提供12V直流电作驱动控制系统[1]。
2 硬件控制系统设计2.1 STM32简介STM32C5616AD微控制器作为整个控制系统的核心,它是一种高性能、宽电压、低功耗、成本低的嵌入式处理器。
工作频率在0—35MH之间,有外部掉电检测电路,可在掉电时及时将数据保存进EEPROM,并进行外部中断唤醒(可支持下降沿/上升沿和远程唤醒),内置Flash程序存储器可达62K、4个16位定时器,10位高速ADC,速度可达25万次/秒,2路PWM还可当2路D/A使用,并且可以使用Keil软件利用C进行编程,不需要操作系统,下图为最小系统电路图电路图,如图1所示[2]。

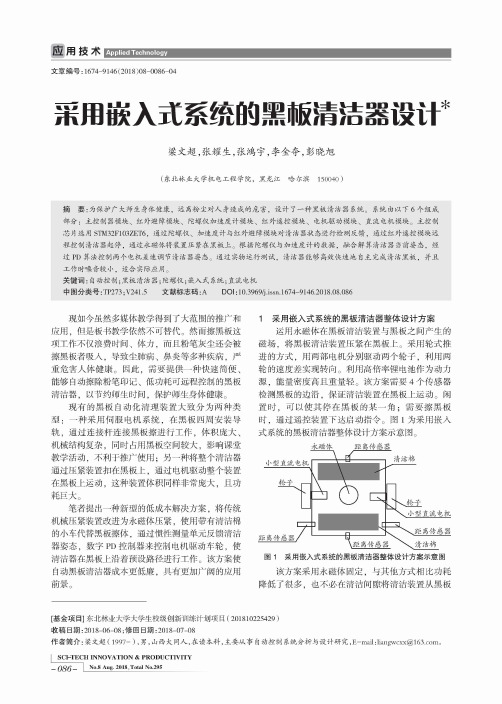
基于单片机的智能无尘黑板擦设计摘要:传统的黑板擦很容易造成粉笔屑飞扬,对于教师以及离黑板较近的学生而言都是不健康的。
本文针对传统黑板擦的弊端设计了一款基于单片机的无尘黑板擦,基本解决了粉尘飞扬的问题,同时可以实时监测环境中粉尘的浓度并显示,保证了教师与学生的身体健康。
关键词:智能无尘黑板擦单片机PM2.51.序言随着经济技术的快速发展,虽然国内的很多学校都使用了多媒体教学,但是传统的板书仍然必不可少,而目前使用最多的还是传统黑板擦。
传统黑板擦主要有两种:一种是毛刷类黑板擦,这类黑板擦是利用人造毛与黑板的摩擦将黑板上的字迹擦除;另一种是海绵类黑板擦,这类黑板擦是将海绵放在板擦底座上,外面包裹一层吸尘较好的布料制作而成。
第一种黑板擦字迹清洁程度较好但在擦除过程中很容易造成灰尘的到处飞扬,既不卫生也不利于教师以及学生的身体健康。
第二种黑板擦虽然相对第一类黑板擦灰尘较少,但是随着外层包裹布粉尘的增多,粉尘吸附率大大降低的同时字迹清洁程度也随之降低。
针对传统黑板擦的弊端,本文设计这款基于单片机的智能无尘黑板擦可实现清洁度与无粉尘的双重优点,同时可以检测环境中粉尘指数,便于教师了解教师中的空气质量。
1.硬件设计1.1 整体框架本文设计的智能黑板擦主要包括:主控部分(单片机),粉尘收集电路,显示电路,驱动电路,电源电路以及检测电路。
框架图如图1所示。
图1 整体框架图1.2 主控部分本文采用的单片机是STM32。
STM32具有成本低廉,性能高效,裁剪性强,功耗低等优点[1],同时该芯片还自带复位电路无需外设复位电路,减少了外电路的复杂程度。
该芯片还集成了低电压检测以及精确的RC振荡器和调压器等电路,集成度高。
工作范围也较宽泛在-40°C至+85°C或105°C之间,使用范围广。
1.3 粉尘收集电路该部分的主要装置为涡轮风机,将毛刷运动过程中产生的粉尘吸收到收集盒中。
风机设置了4档工作模式分别为:启动1档,为了减少元器件的损伤本设计采用的是软起动模式。
DOI:10.16660/ki.1674-098X.2020.03.023基于STM32单片机智能伺服型黑板擦①张家源 王其申 常雪娇* 马惜平(北华大学电气与信息工程学院 吉林吉林 132000)摘 要:本设计基于STM32单片机,设计了自动伺服黑板擦。
系统由信息控制处理模块、驱动设计单元模块、电路电源模块、粉尘收集模块等,使擦黑板环节更高效,环境更洁净,师生更健康。
随着计算机网络科学、多媒体、人工智能等相关技术的出现与普及,为了满足广大师生对于教学设施更为符合人性化设置的高端教学需求,众多与教育相关的教学设备例如智能黑板等进而被发明和产生, 这是新技术发展的趋势及方向所致。
但是现有的高端教学设备有着成本高,智能性差的缺点,特别是还存在工程量较大的问题,难以进行普及,为此我们从体积小巧的黑板擦入手,进行改进与创新。
关键词:黑板擦 STM32单片机 伺服驱动 激光识别 粉尘收集中图分类号:TP3 文献标识码:A 文章编号:1674-098X(2020)01(c)-0023-02①作者简介:张家源(2000—),男,汉族,吉林长春人,本科在读,研究方向:信息与通信工程。
王其申(2000—),男,汉族,山东潍坊人,本科在读,研究方向:信息与通信工程。
马惜平(1975—),女,汉族,吉林辽源人,硕士,讲师,研究方向:计算机网络,多媒体通信技术。
1 产品研究内容智能伺服型黑板擦主要是由驱动装置,控制装置,粉尘收集装置,激光识别控制装置四部分组成。
系统以ST M32芯片为控制核心, 采用DSM501A传感器测量PM2.5、DHT11传感器测量温湿度、伺服驱动器驱动伺服电机控制黑板擦运动,各装置模块分行其职,配合紧密,共同完成擦除工作(见图1)。
使用者只需用特定的标记笔在黑板上的擦除区域进行选择型圈图,系统通过激光识别装置在黑板上定位,会将擦除区域信息传送至信息控制处理模块进行预处理,再将处理好的信息通过主控电路传送至驱动装置模块,然后便对黑板的特定区域进行擦除,工作的同时粉尘收集装置会对杂质粉尘进行收集。
基于STM32单片机智能伺服型黑板擦
智能伺服型黑板擦是一种基于STM32单片机的智能设备。
它可以通过控制电机的转速和方向,实现对黑板进行高效的擦拭操作。
相比传统的手动黑板擦,智能伺服型黑板擦具有更高的效率、更便捷的操作、更稳定的性能等优点,因此被广泛应用于各种教育场景,如学校、会议厅等。
整个智能伺服型黑板擦系统由多个部件组成,包括STM32单片机、电机驱动模块、传感器等,各部件之间通过编程实现数据交互和控制。
首先,通过传感器可以获取黑板的当前状态信息,包括黑板的位置、面积、擦拭情况等。
然后,STM32单片机根据获取到的信息,控制电机进行相应的转动,以实现对黑板的擦拭操作。
此外,STM32单片机还可以通过WIFI模块与互联网进行连接,实现对智能伺服型黑板擦的遥控和监控。
在智能伺服型黑板擦的设计和实现过程中,STM32单片机起到了至关重要的作用。
它不仅集成了多种功能,如计时、计数、PWM调制等,还具有高性能和低功耗的特点。
这使得STM32单片机可以实现高效的控制和稳定的运行,并且可以扩展更多功能和模块。
总之,智能伺服型黑板擦是一种具有高效、便捷、稳定等优点的智能设备,它的核心技术在于STM32单片机的控制和管理。
随着科技的不断进步和应用的不断拓展,智能伺服型黑板擦将在各个教育场景中发挥更重要的作用,为教育事业的发展和进步做出更大的贡献。
基于STM32单片机智能伺服型黑板擦随着科技的不断发展和进步,智能化已经渗透到我们生活的方方面面。
在教育领域,智能化设备也越来越普遍,为教师和学生的教学和学习带来了诸多便利。
基于STM32单片机的智能伺服型黑板擦是一种新型的智能教学设备,它能够帮助教师在课堂上轻松擦写黑板,提高教学效率,使教学更具交互性和趣味性。
一、设备原理智能伺服型黑板擦主要由STM32单片机、伺服电机、传感器、无线模块、电源等组成。
STM32单片机作为控制核心,负责控制伺服电机的运行和擦写操作。
伺服电机根据发来的指令进行运动,使黑板擦能够实现自动擦写功能。
传感器用于感知黑板的位置和形状,以便调整伺服电机的运动轨迹,确保擦写的准确性和稳定性。
无线模块可以实现与电脑或手机的连接,可通过APP或电脑端程序进行远程控制和设置。
二、设备特点1. 自动擦写:通过STM32单片机和伺服电机的配合,智能伺服型黑板擦能够实现自动擦写功能,减轻教师在课堂上的劳动强度,提高教学效率。
2. 准确性和稳定性:通过传感器感知黑板的位置和形状,并通过STM32单片机对伺服电机进行精确控制,可以确保擦写的准确性和稳定性,避免因人为操作误差导致的擦写错误。
3. 远程控制:通过无线模块可以与电脑或手机进行连接,可通过APP或电脑端程序进行远程控制和设置,方便教师在教学过程中进行灵活操作。
4. 交互性和趣味性:智能伺服型黑板擦的出现使得教学更具交互性和趣味性,教师可以在课堂上更加灵活地使用这样的设备,为学生带来更加生动的教学体验。
三、应用场景智能伺服型黑板擦可以广泛应用于各类学校和教学机构,在各种大小的黑板上都可以实现自动擦写的功能。
特别适合于课堂上需要频繁擦写的场景,如数学、物理、化学等科目的课堂教学。
它也可以在会议室、培训中心等场合发挥作用,帮助讲师更加专注于课程内容,提高效率。
四、未来展望随着智能化技术的不断发展和成熟,智能伺服型黑板擦的应用范围和功能将会不断拓展。
基于STM32控制器的智能黑板擦系统设计吕晓彬;王志凌;梁贵龙;魏灵峰【期刊名称】《盐城工学院学报(自然科学版)》【年(卷),期】2018(031)001【摘要】在传统教学模式下,学生考勤签到耗时长,教师擦黑板过程繁琐,严重影响课堂效率,还危害着师生的身心健康.针对以上弊端,设计了一款基于STM32F103ZE 微控制器的智能黑板擦系统.该系统通过STM32控制器可以自主控制伺服电机和气泵,通过履带带动黑板擦移动完成黑板擦拭,同时利用气压差将粉尘吸入储灰箱中.另外系统还增加了补助教学应用的教室环境检测功能和学生考勤功能,使用DSM501A和DHT11检测教室的温湿度、PM2.5值,并将环境检测数据进行输出显示;使用射频卡MFRC522模块对学生卡信息进行读取,并将信息通过NRF24L01模块无线发放送给PC机,实现学生出勤情况的实时统计.【总页数】6页(P36-41)【作者】吕晓彬;王志凌;梁贵龙;魏灵峰【作者单位】南京航空航天大学金城学院,江苏南京 211156;南京航空航天大学金城学院,江苏南京 211156;南京航空航天大学金城学院,江苏南京 211156;南京航空航天大学金城学院,江苏南京 211156【正文语种】中文【中图分类】TS951.71【相关文献】1.基于 STM32和 HC-SR501智能家居的智能照明系统设计 [J], 王东;莫先2.基于STM32F103控制器的智能循迹小车系统设计 [J], 万兵;汪地;史烨桦3.基于STM32单片机的智能黑板擦 [J], 张志豪;白金超;马士腾;4.基于stm32智能除尘黑板擦 [J], 吴乐5.基于STM32单片机智能伺服型黑板擦 [J], 张家源; 王其申; 常雪娇; 马惜平因版权原因,仅展示原文概要,查看原文内容请购买。
Science &Technology Vision科技视界0引言有关数据显示,因为老师常年吸入粉尘,患呼吸道疾病的几率几乎为100%,其中5年以上教师咽炎的患病率几乎为100%、鼻炎患病率为39%、哮喘病患病率为43%、支气管炎的患病率为8%、尘肺病的患病率为11.76%,而且癌症发病率是普通群体的8倍。
为了给广大师生营造一个无尘的学习环境,制作一个智能除尘黑板擦是很有必要的。
1智能除尘黑板擦系统总体设计框图本设计的智能除尘黑板擦利用STM32单片机作为主控芯片,用户可以通过手机APP 、操作界面上面提供的功能按键或者说关键语句让手机识别来直接控制黑板擦。
智能除尘黑板擦整体系统框图如图1所示。
图1智能除尘黑板擦整体系统框图2智能除尘黑板擦系统硬件设计2.1电机驱动模块电机驱动模块电路图如图2所示,电机驱动模块采用了TLP521芯片来进行光电耦合,将STM32单片机的控制电路与电机驱动电路隔离起来,防止电机驱动电路对系统的影响。
TLP521中的光电耦合驱动典型电流在16mA ,输入的电压信号为3.3v ,所以本文选择了220欧的电阻作为限流电阻。
当输入端有信号输入时,发光二极体发光,光敏三极管导通。
当输入端无信号输入时,发光二极体不亮,光敏三极管截止。
导通时L298n 的Input 和Enable 引脚的典型输入值为30uA ,最大值为100uA ,在Input 和Enable 端串联10K 电阻使其输入值为50uA 。
电机正负端接8个二极管是防止当电机反转时起泄流作用。
本设计使用的额定电压12v 的电机,L298n 的负载驱动供电引脚为12V ,逻辑电平为5V ,TLP521的供电为5V ,因此用LM7805来将12V 降为5V ,LM7805上面接了散热片防止过热烧坏芯片,输入极接的二极管是防止反接烧坏芯片,电源正负极接入的电容起滤波作用。
图2电机驱动模块电路图2.2除尘黑板擦模块除尘黑板擦模块示意图如图3所示,接通电源,收到清除指令后,风扇转动,将毛刷清除黑板上字迹所产生的粉尘吸入收纳槽中,气流经过过滤层后才排出干净空气,过滤层含两层,活性炭层和尼龙网层,这样可以将空气中的粉尘过滤的更好。
清洗黑板的时只需将湿毛巾的挂在钩子上。
黑板擦的开与关由继电器控制器控制,主要是接收STM32单片机的高低电平信号。
2.3蓝牙模块对于蓝牙模块,本设计使用的是HC -06蓝牙模块,蓝牙模块的RXT 引脚与STM32单片机的TXD 引脚相连,蓝牙模块的TXD 引脚与STM32单片机的RXT 引※基金项目:2018年广西高校大学生创新项目(201810595209);2018年度广西高等教育本科教学改革工程项目,大类招生环境下对基础必修课大班授课小班研讨教学模式的研究(2018JGB188)。
基于stm32智能除尘黑板擦吴乐(桂林电子科技大学电子工程与自动化学院,广西桂林541004)【摘要】为了营造一个无尘的学习环境,决定设计一个以STM32单片机作为系统核心的智能除尘黑板擦,主要包含电机驱动模块,蓝牙模块,除尘黑板擦模块,操作界面控制,APP 控制,语音识别控制的设计。
根据用户的需求,操作界面、APP 、语音识别设置了一系列的按键以及关键词,从而实现上下左右擦除等功能。
经实际测试,黑板擦具有良好的擦除和吸尘的效果。
【关键词】智能;除尘;黑板擦;APP ;语音识别中图分类号:TP242;TP368.1文献标识码:A 文章编号:2095-2457(2019)02-0058-003DOI :10.19694/ki.issn2095-2457.2019.02.02558脚相连,通信方式采用全双工方式,通信频率采用的是9600bit/s。
与手机APP主从机应答后,进行无线传输数据。
图3除尘黑板擦模块2.4操作界面对于操作界面,本设计使用的是串口彩屏,串口彩屏的RXT引脚与STM32单片机的TXD引脚相连,串口彩屏的TXD引脚与STM32单片机的RXT引脚相连,通信方式采用全双工方式,通信频率采用的是9600bit/ s。
在屏幕区域中设计功能键区,如果被单击下去,将进行有线数据传送。
3除尘黑板擦的软件设计本设计的程序主要包括主程序、串口初始化子程序,定时器初始化子程序、定时器中断服务子程序、APP程序、语音识别程序、串口彩屏程序等。
3.1主程序首先进行程序初始化,然后等待语音识别、APP上的功能按键被按下、串口彩屏上的按键按下,接着进入定时器中断服务程序,让电机转动,实现相应的功能。
主程序流程图如图4所示。
图4主程序流程图3.2串口初始化接收串口彩屏和蓝牙的数据是在中断处理函数完成的,因为每接收一帧数据就会进入一次中断处理函数,在函数中判断接收到的数据是否与功能指令数据匹配,如果匹配,则STM32单片机控制电机、黑板擦执行相应的功能。
3.3手机APP手机APP的实物图如图图5所示,它具有直接控制的功能以及语音控制功能,它是通过E4A平台用中文编写的,然后编译为java,在它自己的Linux进程中运行。
图5手机APP的实物图3.4串口彩屏程序串口彩屏界面的实物图如图图6所示,串口彩屏操作界面可以设置许多功能按键,按键代码区又分为按下事件和弹起事件,每个都是在弹起事件里写代码的,其中一个的代码如下。
Print"X1B"当按键被按下弹起的时候,STM32单片机的串口将会收到串口彩屏发来的数据。
图6串口彩屏操作界面的实物图3.5定时器及服务函数Lsens_Init();//霍尔传感器初始化TIM3_Int_Init(9999,7199);//定时器初始化void LED_Init(void);//电机驱动初始化int Read_Encoder(u8TIMX){int Encoder_TIM;59Science&Technology Vision科技视界switch(TIMX){case2:Encoder_TIM=(short)TIM2->CNT;TIM2 ->CNT=0;break;case3:Encoder_TIM=(short)TIM3->CNT;TIM3-> CNT=0;break;case4:Encoder_TIM=(short)TIM4->CNT;TIM4 ->CNT=0;break;default:Encoder_TIM=0;}return Encoder_TIM;}返回相应的霍尔传感器检测值,计算距离。
利用给予不同的时间和不同的功率来实现黑板的定位,将黑板分成四部分,利用二维数组来储存的黑板的当前位置和下一位置要调用的时间和功率,当发送的数据被单片机接受的时候,根据要移动位置自动判断要移动的时间和功率从数组选取合适的数值来进行移动,利用定时器中断,每50ms执行一次判断,这样大大节省了CPU占用率,可以节省资源去进行别的处理。
当50ms的中断到来时进行状态判断,然后送出相应的PWM来控制功率,进行一定的延时时间来移动到所需要的位置。
4实验结果以及性能因为空间大小的限制,所以本文选用了大小为90cm*60cm的黑板,进行多次机器擦除与人工擦除,最后得出将黑板由下往上,再由上往下全部清除所需时间。
在擦除的过程中,电机的选择会产生噪声,而人工不会。
机器擦除有吸尘功能,擦除时空气中的粉尘很少,而人工的却很多。
相对同等干净程度人工擦除更快。
对比结果如表一所示,实物图如图7所示。
5结论本设计以STM32单片机为核心的智能除尘黑板擦,经过实物调试后,初步证实了智能除尘黑板擦的可行性。
本次实验的缺点是智能除尘黑板擦的擦除效率还不够高,以及会产生噪声;优点是擦除黑板时基本不产生粉尘。
表1对比结果图7智能除尘黑板擦实物图【参考文献】[1]彭绍松,陈锴强,林俊腾,杨贵志.静电除尘黑板擦的研究与设计[J].信息化研究,2017,43(02):33-36.[2]赵晨阳.基于负压吸附和静电除尘的静音黑板擦设计[J].无线互联科技,2017(11):55-56+94.[3]徐华丹,余红娟.基于单片机的直流电机测速系统设计[J].科学技术创新,2017(34):6-7.[4]王庆江.面向手机控制的智能家居系统设计分析[J].科技与创新,2015(10):31-32.黑板大小90cm*60cm全部清除所需时间产生噪声清除程度空气中粉尘度机器擦除83s是干净很少人工擦除40s否干净大量(上接第55页)型案例展开分析讨论,通过实际案例的分析学习,使学生获得知识和经验,指导今后的实际工作。
(4)情景教学法:针对各个典型工作任务,教师利用实训室和辅助物品设备等积极创设生动具体的酒店工作情景,营造真实的教学环境。
在真实的课堂教学中,需要多种教学方法相互补充,针对不同的教学内容,采用适用的教学方法,注重课程实效。
(5)第二课堂:开拓第二课堂,展开形式多样,丰富多彩的礼仪知识与竞赛活动,以多元化方式,丰富学生的礼仪知识学习。
6教学感悟与评价养成教育不仅要言传身教,更要常抓不懈。
礼仪行为不仅要体现在课堂上,更要延伸到课堂外;校内的小路上的相遇、问候、招呼等等都传递着礼仪的自觉性和主动性。
通过说课,教师可以从整体上把握课程,对课程进行系统的梳理,选择适合的方法来提升课堂教学效果。
教师在教学实践中,应因材施教,随着时间的变化和社会的发展,课程的讲授也不断发展,《酒店服务礼仪》课程更是如此,礼仪随着时代的进步不断发展着。
在今后的教学中,授课教师需根据学生特点,教学环境和教学理论等各方面因素的变化和发展,适时做出调整和改进,以期课程教学能够不断前进,在和谐社会发展中起到更重要的作用。
【参考文献】[1]韩珊珊.高职酒店英语课程说课[J].长沙铁道学院学报(社会科学版),2014.[2]于舜.基于任务驱动的高校《电子商务》课程教学方法改革[J].中外企业家,2015.[3]范晓云.《商务函电》一体化教学初探[J].技术与市场,2015.[4]肖红.对依托统战传统教育基地开展现场教学的思考[J].重庆社会主义学院学报,2015.[5]海南,刘洪忆.任务驱动教学法在高职文言文教学中的运用[J].北京政法职业学院,2010.[6]丁光金.用“任务驱动”法提高信息技术教学效果[J].吉林省龙井市教师进修学校,2014.[7]汤洪宇,唐臣,吴秀丽,梁玲玲,黄西宁,李洪亮.项目导向教学法在高职《国际贸易理论与实务》课程中的运用[J].广西城市职业学院,2016.60Science&Technology Vision 科技视界。