2015年全国大学生电子设计大赛F题技术报告
- 格式:pdf
- 大小:810.32 KB
- 文档页数:22

关于2015年全国大学生电子设计竞赛控制类赛题的分析一笔丹青QQ:2990731899从今天大赛组委会公布的元器件清单来看,今年控制类赛题依然是两个:1、多旋翼飞行器;2、机械控制类装置。
以下是我个人对此次电赛控制类赛题的具体分析。
1.多旋翼飞行器相比于2013年明确规定飞行器为“四旋翼飞行器”,今年放宽为“多旋翼飞行器”,一般多旋翼飞行器泛指:四旋翼飞行器、六旋翼飞行器和八旋翼飞行器,之所以放宽,最大的原因应该是让参赛队充分发挥自己的聪明才智,设计制作出比较亮眼的作品。
另外,今年同样出现了瑞萨半导体公司赞助的R5F100LEA型单片机,这款单片机和13年为同一型号。
2013年这款单片机被指定为四旋翼飞行器赛题必选MCU,结果,在南京举办的全国决赛中,几乎没有一支队伍能够完成所有指标。
大家对这款单片机不熟悉是一方面的原因,更核心的问题是不能熟练应用控制算法,当然,这个题本身也有问题(黑线的识别没有很好的办法)。
今年飞行器是否还会指定瑞萨单片机呢??我个人觉得可能性很大,原因如下:一、R5F100LEA型单片机硬件资源丰富,为16为高性能MCU,独特的开发环境使得硬件配置只需点击鼠标便可以解决,完全适用于多旋翼飞行器;二、2013年的配套教学视频中专门讲述了与四旋翼飞行器有关的PWM、SPI、IIC 硬件配置,大家已经对瑞萨有一定认识;而今年这款原来并不在国内零售的单片机开始零售,有志于参加电赛的同学早有接触,且国内对四旋翼飞行器的研究如火如荼,各种电子设计类赛事中均有出现,早已不存在2013年那样的技术壁垒,应该说真正意义上开展竞赛的时机已然成熟。
综上,今年出现四旋翼飞行器的可能性不容忽视。
1.1具有AV端子输出的彩色摄像头(彩色制式不限)看到摄像头,大家想首先想到的是航拍,可能用到四旋翼飞行器上。
不过,强调摄像头必须是能输出彩色图像和具备AV端口的要求似乎暗示,摄像头可能并不是机载的。
AV端子也称AV接口,音频(Audio )和视频(Video )的简称,涉及视频和音频,数据量瞬间上升,这不是一般单片机能够处理的!!即便是飞思卡尔智能车比赛中用到的摄像头也只是数据量较小的CCD,并非AV制式。
基于FPGA的频谱分析仪的制作队员:余枭昆、徐嵩、张杰1、简要概述本系统山PLL模块、液晶同步模块、显示模块、AD模块、数据缓冲模块、按键模块、FFT模块以及2个RAM 〔波形RAM和频谱RAM〕和1个ROM 〔用于存储网格数据〕组成。
其中PLL模块对外接的频率为50M的晶振进行倍频与分频,为整个系统提供频率为40M的时钟;同步模块用来输出TFT显示屏的行同步信号、列同步信号以及当前扫描点的行列地址,显示模块根据这些信号判断何时显示RGB数据;AD 模块在40M时钟的驱动下,对外部输入的模拟信号进行不间断的取样和转换,转换后的数字信号同时送人译码模块和FFT模块。
其中译码后的波形数据送入波形RAM,经过快速傅里叶变换的频谱数据送入频谱RAM,山显示模块分别在两个网格中显示。
二、所用的硬件介绍2.1 液晶屏 TFT : AT070TN83 V. 1我们所使用的液晶屏是7寸的,分辨率为800*3 〔RGB〕 *480,RGB三色,6位深度两种显示模式:一种是同步模式,一种是DE模式液晶屏内部等效电路Oak 如ver同步模式下的时序〔输入信号的特点〕:1.时钟周期25纳秒2.时钟频率40M赫兹3.最小高电平与低电平的宽度为8ns4.水平同步信号周期为1036个时钟周期5.水平同步信号宽度为1个时钟周期6.水平同步信号后沿宽度为45个时钟周期7.水平同步信号与其后沿的周期和为46个时钟周期8.水平有效数据宽度为800个时钟周期9.时钟上升下降时间最多3纳秒10.垂直同步信号周期为635个水平同步信号周期11.垂直同步脉冲宽度为1个水平同步信号周期12.垂直同步后沿宽度为22个水平同步信号周期13.垂直有效数据宽度为480个水平同步信号周期14.数据建立时间至少为5纳秒15.数据保持时间至少为10纳秒2.2 FPGA 芯片:Cyclone IV E: EP4CE6F17C82.2.1 Altera公司简介Altera公司是世界上“可编程芯片系统〞〔SOPC〕解决方案倡导者。

2015年全国大学生电子设计竞赛风力摆控制系统(B题)2015年8月15日摘要本风力摆系统主要包括单片机控制模块,开关电源(电源模块)激光笔及小型轴流风机,以及基于六轴倾角仪mpu6050的闭环控制系统。
其中控制模块采用STM32为核心控制芯片,激光笔作为系统的执行机构,12V2.5A的小型轴流风机作为驱动风力摆的唯一动力,用12V的开关电源驱动轴流风机。
轴流风机和摆杆通过万向节固定在支架上(用粗股导线将风力摆悬挂在支架上)。
固定在支架上,测量得到的角度经过软件处理得到风力摆摆动所需要的PWM值。
(本系统的PID 算法算法是通过实际经验试验出风力摆的控制规律,稳定的完成风力摆运动过程中激光笔画轨迹。
)关键词:风力摆; STM32; 轴流风机; PID算法; mpu6050目录一、系统结构方案与设计 (1)1、机械结构设计 (1)2、主控芯片的论证与选择 (1)3、风力摆结构方案的论证和选择 (2)4、运动控制算法的论证和选择 (2)二、系统理论分析与计算 (2)1、摆杆位置检测 (2)2、风力摆运动控制分析 (2)3、控制算法分析 (2)三、电路与程序设计 (3)1、电路的设计 (3)(1)STM32最小系统电路 (4)(2)稳压电源电路 (4)2、程序的设计 (4)(1)程序功能描述与设计思路 (4)(2)程序流程图 (4)四、测试方案与测试结果 (5)1、测试方案 (5)2、测试条件与仪器 (5)3、测试结果及分析 (5)(1)测试结果(数据) (5)(2)数据分析与结论 (7)五、结论与心得 (7)六、参考文献 (8)附录1:电路原理图 (9)附录2:源程序 (11)风力摆控制系统(B题)【本科组】一、系统结构方案与设计1、机械结构设计我们以生钢为材料加工成的十字作为风力摆支架的底盘,结构坚固克服摆动时的震动。
以实心的钢棒作为摆杆减小了摆动时的自旋,用万向节将摆杆和支架的水平臂连接保证了摆动的灵活性以及达到了摆动角度和速度的精确控制。
郑州轻工业学院电子技术课程设计题目: 2015年电赛测评试题*名:***专业班级:电信13-01 学号: ************ 院(系):电子信息工程学院指导教师:曹卫锋谢泽会完成时间: 2015年10月 29日郑州轻工业学院课程设计任务书题目 2015年电子设计大赛综合测评试题专业电信工程13-1 学号 541301030134 姓名王苗龙主要内容、基本要求、主要参考资料等:主要内容1.阅读相关科技文献。
2.学习电子制图软件的使用。
3.学会整理和总结设计文档报告。
4.学习如何查找器件手册及相关参数。
技术要求1、使用555时基电路产生频率20kHz-50kHz连续可调,输出电压幅度为1V的方波Ⅰ;2、使用数字电路74LS74,产生频率5kHz-10kHz连续可调,输出电压幅度为1V的方波Ⅱ;3、使用数字电路74LS74,产生频率5kHz-10kHz连续可调,输出电压幅度峰峰值为3V的三角波;4、产生输出频率为20kHz-30kHz连续可调,输出电压幅度峰峰值为3V的正弦波Ⅰ;5、产生输出频率为250kHz,输出电压幅度峰峰值为8V的正弦波Ⅱ;方波、三角波和正弦波的波形应无明显失真(使用示波器测量时)。
频率误差不大于5%;通带内输出电压幅度峰峰值误差不大于5%。
主要参考资料1.何小艇,电子系统设计,浙江大学出版社,2010年8月2.姚福安,电子电路设计与实践,山东科学技术出版社,2001年10月3.王澄非,电路与数字逻辑设计实践,东南大学出版社,1999年10月4.李银华,电子线路设计指导,北京航空航天大学出版社,2005年6月5.康华光,电子技术基础,高教出版社,2006年1月完成期限: 2015年10月30日指导教师签章:专业负责人签章:2015 年 10月26日2015年电子设计大赛综合测评试题摘要模拟电路中,多种波形产生电路属于信号的运算与处理电路,它主要由信号产生电路、信号运算电路、信号处理电路构成。
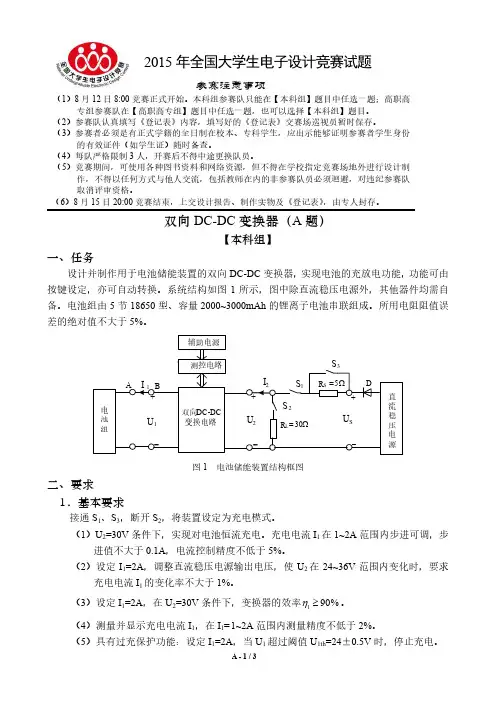
2013年全国大学生电子设计竞赛双向DC-DC变换器(A题)2015年8月12日摘要本系统以Buck和Boost并联,实现双向DC-DC交换,以STM32为核心控制芯片。
Buck降压模块使用XL4016开关降压型转换芯片,通过单片机闭环实现恒流输出控制。
放电回路选择Boost升压模块,以UC3843作为PWM控制器,组成电压负反馈系统,通过调整PWM的占空比,实现稳压输出。
系统能自动检测外部电源电压变化,在负载端电源较高时自动切换成充电模式,反之切换为放电状态。
系统具有过流、过压保护功能,并可对输出电压、电流进行测量和显示。
关键字:DC-DC交换;Buck;Boost;PWM控制AbstractThe system is Buck and Boost parallel, to achieve two-way DC-DC exchange, STM32 as the core control chip.The Buck Buck module uses the XL4016 switch Buck converter chip, takes the current signal in the output, controls the feedback of XL4016, completes the closed-loop control, and realizes the constant current output. Boost boost module uses UC3843 as the PWM control chip, according to the output voltage negative feedback signal to adjust the PWM signal, the closed-loop control is carried out, in order to achieve the regulator output.System can automatically switch charge and discharge mode, can also be manually switch. The system has the function of over current and over voltage protection, and can measure and display the output voltage and current.Key words: bidirectional DC-DC converter, Buck, boost, PWM control目录1系统方案 (1)1.1 升、降压电路的论证与选择 (1)1.2 系统组成及控制方法 (1)2系统理论分析与计算 (2)2.1 电路设计与分析 (2)2.1.1 提高效率的方法 (2)2.1.2 控制回路分析 (2)2.2 控制方法分析 (2)2.3 升压、降压电路参数计算 (3)2.3.1 元件选取 (3)2.3.2 电感计算 (3)3电路与程序设计 (4)3.1电路的设计 (4)3.1.1系统总体框图 (4)3.1.2 充电系统原理 (4)3.1.3 放电系统原理 (5)3.2程序的设计 (5)3.2.1程序功能描述与设计思路 (5)3.2.2程序流程图 (5)4测试方案与测试结果 (6)4.1测试方案 (6)4.2 测试条件与仪器 (7)4.3 测试结果及分析 (7)4.3.1测试结果(数据) (7)4.3.2测试分析与结论 (7)附录1:电路原理及实物 (8)附录2:主要程序片段 (9)双向DC-DC变换器1系统方案系统要求效率,所以恒压输出、稳流输出都应采用开关电路,鉴于本题目要求的功能,系统主要由恒压控制模块、恒流控制模块组成,另为了灵活调整输出参数并实时监控系统工作状态,运用单片机控制技术,还有支持系统控制系统工作的辅助电源。
2015年全国大学生电子设计竞赛风力摆控制系统(B题)2015年8月14日摘要当今的闭环自动控制技术都是基于反馈的概念以减少不确定性。
反馈理论的要素包括三个部分:测量、比较和执行。
测量关心的是被控变量的实际值,与期望值相比较,用这个偏差来纠正系统的响应,执行调节控制。
在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。
本课题要设计的是风力摆控制系统,通过轴流风机使摆杆摆动,通过主控K60控制轴流风机的各风机风力,使风力摆按照一定规律运动,下端的激光笔在地面上画出要求的轨迹。
关键词:风力摆;轴流风机;PID;K60;目录一、系统方案 (1)1、XXXX的论证与选择 (1)2、XXXX的论证与选择 (1)3、控制系统的论证与选择 (1)二、系统理论分析与计算 (1)1、XXXX的分析 (1)(1)XXX (1)(2)XXX (1)(3)XXX (1)2、XXXX的计算 (2)(1)XXX (2)(2)XXX (2)(3)XXX (2)3、XXXX的计算 (2)(1)XXX (2)(2)XXX (2)(3)XXX (2)三、电路与程序设计 (2)1、电路的设计 (2)(1)系统总体框图 (2)(2)XXXX子系统框图与电路原理图 (2)(3)XXXX子系统框图与电路原理图 (2)(4)电源 (3)2、程序的设计 (3)(1)程序功能描述与设计思路 (3)(2)程序流程图 (3)四、测试方案与测试结果 (3)1、测试方案 (3)2、测试条件与仪器 (4)3、测试结果及分析 (4)(1)测试结果(数据) (4)(2)测试分析与结论 (4)五、结论与心得 (4)六、参考文献 (4)附录1:电路原理图 (5)附录2:源程序 (6)XXXXXXXX(X题)【本科组】一、系统方案本系统主要由XXX模块、XXX模块、XXX模块、电源模块组成,下面分别论证这几个模块的选择。
2015年电源国赛题的优秀国奖报告摘要:一、引言1.介绍2015年电源国赛2.获奖报告的背景及意义二、比赛题目背景及分析1.电源国赛题目概述2.题目难度及挑战性三、解题思路及方法1.针对题目进行深入研究2.提出创新性解题思路3.应用先进技术解决实际问题四、实验过程及结果1.实验设备及环境2.实验过程详述3.实验结果分析五、总结与展望1.比赛成果总结2.对未来电源技术的展望3.对我国电源行业的贡献正文:一、引言2015年电源国赛是一场汇聚了全国各地电源技术精英的赛事,旨在选拔优秀的人才,推动我国电源技术的发展。
本文将介绍一份获得优秀国奖的获奖报告,以此为例,展示我国电源技术的前沿水平。
二、比赛题目背景及分析2015年电源国赛的题目紧密结合实际,具有很高的挑战性。
选手需要在有限的条件下,针对复杂的电源问题提出创新性的解决方案。
这份获奖报告在众多参赛作品中脱颖而出,为电源领域提供了新的思路。
三、解题思路及方法获奖报告的选手针对题目进行了深入研究,从实际出发,提出了一种创新性的解题思路。
他们结合先进的技术,针对电源问题进行了巧妙地解决,为我国电源技术的发展做出了贡献。
四、实验过程及结果选手们在实验过程中充分展示了他们的专业素养和团队协作能力。
他们在实验设备及环境方面做了充分的准备,详细记录了实验过程,并对实验结果进行了严谨的分析。
实验结果表明,他们的解题思路和方法是有效的。
五、总结与展望本次比赛,获奖报告展示了我国电源技术领域的优秀成果。
通过这次比赛,选手们不仅提高了自己的专业技能,还对我国电源行业的发展产生了积极影响。
南华大学黄智伟备战2015 全国大学生电子设计竞赛无线电类赛题分析三、无线电类作品 3.1 “无线电类”赛题分析3.1.1 历届的“无线电类”赛题在11届全国大学生电子设计竞赛中,“无线电类”赛题共有7题,也有将电压控制LC振荡器(2003年,A题)(该题划在信号源类),LC 谐振放大器(2011年,D题本科组)(该题划在放大器类)和射频宽带放大器(2013年, D题,本科组)(该题划在放大器类)划分在此,称为“高频无线电类”。
“无线电类”赛题如下:z 简易无线电遥控系统(1995年C题) z 调幅广播收音机(1997年D题) z 短波调频接收机(1999年D题) z 调频收音机(2001年F题)z 单工无线呼叫系统(2005年D题) z 无线识别装置(2007年B题,本科组)z 无线环境监测模拟装置(2009年D题,本科组)1997年~2001年由于是SONY公司赞助的,所以都有收音机的赛题,从2003年起,赛题涉及到的范围就宽多了。
目前已出赛题的频率范围在几MHz ~ 40MHz之间。
注意:设计制作“无线电类”赛题是不允许采用现成的RF模块的。
而在一些“控制类”作品中也会使用到RF模块,在这些赛题中是允许使用现成的RF模块的。
3.1.2历届“无线电类”赛题的主要知识点从最近几届的赛题来看,主攻“无线电类”赛题方向的同学除了需要掌握模拟电路、数字电路、单片机电路和电子测量电路的知识外,还需要了解:z RF(射频)接收电路设计与制作 z RF(射频)发射电路设计与制作z RF(射频)小信号放大器电路设计与制作z RF(射频)功率放大器(A~E类)电路设计与制作 z RF(射频)信号检测电路设计与制作 z LC 振荡器电路设计与制作z VCO(压控振荡器)电路设计与制作 z PLL(锁相环)电路设计与制作 z DDS电路设计与制作z FM调制与解调电路设计与制作 z ASK调制与解调电路设计与制作 z FSK调制与解调电路设计与制作 z 电路之间的阻抗匹配设计与制作 z 天线阻抗匹配的设计与制作 z 电感线圈的设计与制作z RF 电路的PCB设计与制作例1:简易无线电遥控系统(1995年C题):要求设计并制作无线电遥控发射机和接收机。
调幅信号处理实验电路(F题)西安电子科技大学傅丰林2017‐11‐04目录一、命题目的二、方案选择和论证三、理论分析与计算四、电路与程序设计五、测试结果提高通信电路(又称高频电子线路、非线性电路等)工作频率,2015年200MHz,2017年提高到300MHz以上。
尽可能避开通信概念,只要学过通信电子线路都能做。
调幅信号处理实验电路(F题)【本科组】一、任务设计并制作一个调幅信号处理实验电路。
其结构框图如图1所示。
输入信号为调幅度50% 的AM信号。
为其载波频率为250MHz~300MHz,幅度有效值Virms10µV~1mV,调制频率为300Hz~ 5kHz。
低噪声放大器的输入阻抗为50Ω,中频放大器输出阻抗为50Ω,中频滤波器中心频率为10.7MHz,基带放大器输出阻抗为600Ω、负载电阻为600Ω,本振信号自制。
图1 调幅信号处理实验电路结构框图二、要求1.基本要求(1)中频滤波器可以采用晶体滤波器或陶瓷滤波器,其中频频率为10.7MHz;(2)当输入AM信号的载波频率为275MHz,调制频率在300Hz ~5kHz 范围内任意设定一个频率,V irms=1mV时,要求解调输出信号为V orms=1V±0.1V的调制频率的信号,解调输出信号无明显失真;(3)改变输入信号载波频率250MHz~300MHz,步进1MHz,并在调整本振频率后,可实现AM信号的解调功能。
2.发挥部分在(1)当输入AM信号的载波频率为275MHz,Virms10µV~1mV之间变动时,通过自动增益控制(AGC)稳定在1V±0.1V;电路(下同),要求输出信号Vorms(2)当输入AM信号的载波频率为250MHz~300MHz在10µV~1mV之间变动,(本振信号频率可变),Virms稳定在1V±0.1V;调幅度为50%时,要求输出信号Vorms稳定在1V±0.1V的前提下,尽(3)在输出信号Vorms可能降低输入AM信号的载波信号电平;稳定在1V±0.1V的前提下,尽(4)在输出信号Vorms可能扩大输入AM信号的载波信号频率范围;二、方案选择和论证系统由射频低噪声放大器、混频、本振信号产生、中频滤波放大、AM检波和基带滤波放大以及自动增益控制等组成。
南华大学黄智伟 备战2015 全国大学生电子设计竞赛电源类赛题分析一、 电源类作品1.1 电源类赛题分析1.1.1 历届的“电源类”赛题在11届全国大学生电子设计竞赛中,电源类赛题有10题[1]:① 简易数控直流电源(第1届,1994年A 题)② 直流稳压电源(第3届,1997年A 题)③ 数控直流电流源(第7届,2005年F 题)④ 三相正弦波变频电源(第7届,2005年G 题)⑤ 开关稳压电源(第8届,2007年E 题,本科组)⑥ 光伏并网发电模拟装置(第9届,2009年A 题,本科组)⑦ 电能搜集充电器(第9届,2009年E 题,本科组)⑧ 开关电源模块并联供电系统(第10届,2011年,A 题,本科组)⑨ 单相AC-DC 变换电路(第11届,2013年 A 题,本科组)⑩ 直流稳压电源及漏电保护装置(第11届,2013年 L 题,高职高专组)从历届赛题可以看到, “电源类”赛题从AC →DC ,从DC →AC ,从单相电到3相电,从线性稳压器到开关稳压器,从单个电源到多个电源并联,已经涉及到电源设计基础的和先进的技术,而且赛题要求的技术参数指标也是越来越高(例如,精度、效率η(≥95%)等)。
例1:2005年G 题“三相正弦波变频电源”赛题要求[1]:(1)输出频率范围为20Hz ~100Hz 的三相对称交流电,各相电压有效值之差小于0.5V ;(2)当输入电压为198V ~242V ,负载电流有效值为0.5~3A 时,输出线电压有效值应保持在36V ,误差的绝对值小于1%;(3)设计制作具有测量、显示该变频电源输出电压、电流、频率和功率的电路,测量误差的绝对值小于5%;(4)变频电源输出频率在50Hz 以上时,输出相电压的失真度小于5%;(5)具有过流保护(输出电流有效值达3.6A 时动作)、负载缺相保护及负载不对称保护(三相电流中任意两相电流之差大于0.5A 时动作)功能,保护时自动切断输入交流电源。
数字频率计方案二:使用专用高速比较器进行整形,但需要对输入信号加入偏置电压,频带较方案一宽。
综合比较:由于设计要求最高到100MHz频率,带宽很宽。
在1MHz以下的频段更我们采用方案一,而在1MHz以上的频段采用方案二。
二、理论分析与计算2.1共射共基放大电路的分析与计算本系统在10KHz-1MHz频段的时间间隔测量中使用了9018构成的共射共基放大电路,其原理分析如下:3.1 硬件电路设计3.1.1微弱信号放大及整形电路电流型运放Opa690,具有很大增益带宽积,在很宽的带宽内,对于微弱信号都有很好的放大效果。
放大后将信号输入到比较器中进行比较整形。
3.1.2高频信号放大及整形电路在高达数十兆的频带中,upc1651能够不失真地放大微弱信号,本设计采用二级upc1651放大,并将20M到100M频率之外的干扰信号滤除,很好的实现了高频放大及整形功能。
3.2 软件设计3.2.1流程图对信号进行采集,采集完成后DSP 对FPGA 采集的信号进行读取并处理,然后通过12864屏幕显示;FPGA 主频过高,采集高频信号精确,但对低频信号的采集误差较大,采集时首先对被采信号的频率加以判断,若为高频则采用测频法测量,若为低频则使用测周法来测量;测量时间间隔时在测频的基础上采集两路信号的上升沿时间差即可;测量占空比时,只需要测量高电平的持续时间,DSP 读取后根据测量到的频率来计算出占空比;所有需要显示的数据都通过DSP 处理后由12864显示屏显示出来。
四、系统测试4.2 测试方法1、由函数发生器随机给出频率在1~10MHZ 各个频段的数个有效值在50mV~1V 的正弦波,分别用频率计和自行设计的数字频率计,进行频率测量并加以比较,计算相对误差。
2、由双通道DDS 函数发生器产生两路同频同周期的方波,其频率在100HZ~1MHZ 之间变换,信号峰峰值限制在50m~1V 之间,测量两路信号的时间间隔。
3、将被测信号的频率范围增大到1HZ~1MHZ,再次验证频率和周期的测量功能。
2017年全国大学生电子设计竞赛陕西赛区设计报告封面作品编号:(由组委会填写)… …………… ……………剪切线……………… …………… …作品编号:(由组委会填写)说明1.为保证本次竞赛评选的公平、公正,将对竞赛设计报告采用二次编码;2.本页作为竞赛设计报告的封面和设计报告一同装订;3.“作品编号”由组委会统一编制,参赛学校请勿填写;4.“参赛队编号”由参赛学校编写,其中“学校编号”应按照巡视员提供的组委会印制编号填写,“组(队)编号”由参赛学校根据本校参赛队数按顺序编排,“选题编号”由参赛队员根据所选试题编号填写,例如:“0105B”或“3367F”。
5. 本页允许各参赛学校复印。
2017年全国大学生电子设计竞赛简易水情监测系统(P题)2017年8月12日摘要水是生命之源,我们在日常生活中所要饮用的水的Ph值应在6.5—8.5之间,Ph值的标准是以氢离子的标准定位的,小于7的是显酸性的,大于7的是显碱性的,直饮水的标准刚好显中性,但是看上去同样都是无色无味的各种水的Ph 值其实是有很大差异的,对人体健康的影响也完全不同。
本课题要设计的容器中液体高度、液体Ph值和测量供电电池组的输出电压,并在液晶显示器上显示所测量的数据。
从而可以直接的看出容器中的水位高度,液体Ph值,供电电池组的输出电压。
本次设计以STC89C52RC芯片组为核心,辅以相关外围电路,本设计以单片机为核心的水情检测系统,系统由6V电池组供电,除单片机外,采用杜邦线来连接LCD12864液晶显示器、PCF8591模块、液位传感器,Ph值传感器。
本系统可直接用于水库、池塘、河流等,进行Ph值得测量和水位的检测。
关键词:液体高度;液体Ph值;输出电压;单片机STC89C52RC目录一、系统方案 (1)1、方案的论证与选择 (1)二、系统理论分析与计算 (1)1、系统理论的分析 (1)(1)LCD12864显示器 (1)(2)水位传感器 (2)(3)Ph值测量 (2)(4)电池组 (3)2、水位高度的计算 (3)3、Ph值的计算 (3)4、供电电池组电压的计算 (3)三、电路与程序设计 (3)1、电路的设计 (3)(1)系统总体框图 (3)(2)水位检测子系统框图 (4)(3)PH检测子系统框图 (4)2、程序的设计 (4)(1)程序功能描述与设计思路 (4)(2)程序流程图 (5)四、测试方案与测试结果 (5)1、测试方案 (5)2、测试条件与仪器 (5)3、测试结果及分析 (6)(1)测试结果 (6)(2)测试分析与结论 (6)五、参考文献........................................ 错误!未定义书签。