第七章位移法(选择填空题)
- 格式:pdf
- 大小:169.46 KB
- 文档页数:5
第七章位移法【练习题】7-1是非题:1、位移法未知量的数目与结构的超静定次数有关。
2、位移法的基本结构可以是静定的,也可以是超静定的。
3、位移法典型方程的物理意义反映了原结构的位移协调条件。
4、结构按位移法计算时,其典型方程的数目与结点位移数目相等。
5、位移法求解结构内力时如果M P图为零,则自由项R IP一定为零。
6、超静定结构中杆端弯矩只取决于杆端位移。
7、位移法可解超静定结构,也可解静定结构。
8、图示梁之EI =常数,当两端发生图示角位移时引起梁中点C之竖直位移为(3/8)1 (向下)。
l /2l /29、图示梁之EI=常数,固定端A发生顺时针方向之角位移,由此引起铰支端B之转角(以顺时针方向为正)是-/210、用位移法可求得图示梁B端的竖向位移为ql3/24EI。
| H I八H M H仏A ELB -11、图示超静定结构,D为D点转角(顺时针为正),杆长均为I , i为常数。
此结构.. 2可写出位移法方程11i D ql /12 0 。
7-2选择题:1、位移法中,将铰接端的角位移、滑动支承端的线位移作为基本未知量:A、绝对不可;B、必须;C、可以,但不必;D、一定条件下可以。
2、AB杆变形如图中虚线所示,则A端的杆端弯矩为:A. M AB 4i A 2i B 6i AB/I ;B. M AB 4i A 2i B 6i AB /1 ;C.M AB 4i A 2i B 6i AB / | ;D. M AB 4i A 2i B 6i AB /1。
A3、图示连续梁,已知P ,l, B , C ,贝U:A M BC4i B4i C;B M BC4i B2i C・C . M BC4i B PI / 8;D . M BC4i B PI /8 。
4、图示刚架,各杆线刚度i相同,则结点A的转角大小为:A . m o /(9i ) ;B . m °/(8i );C . m )/(11 i ) ;D . m o /(4 i ) o5、图示结构,其弯矩大小为:A . M AC ==Ph /4, M BD = =Ph /4 ;B . M AC = :Ph /2, M BD =Ph /4 ;C . M AC ==Ph /4, M BD = =Ph /2 ; D . M AC : =Ph /2, M BD = = Ph /2。
位置位移练习题一、选择题1. 位移是描述物体位置变化的物理量,其方向是由起点指向终点。
以下哪个选项正确描述了位移的特点?A. 位移是标量,只有大小没有方向B. 位移是矢量,有大小和方向C. 位移的大小等于物体运动的路程D. 位移的大小等于物体运动的时间2. 物体从A点移动到B点,再从B点返回A点,其位移大小为:A. 0B. 从A到B的距离C. 从B到A的距离D. 从A到B再从B到A的总距离3. 以下哪个选项正确描述了路程和位移的区别?A. 路程是物体实际走过的路径长度,位移是物体位置变化的物理量B. 路程和位移是同一个概念C. 路程是矢量,位移是标量D. 路程是标量,位移是矢量二、填空题4. 位移的大小等于首末位置的距离,用公式表示为:\( \text{位移} = \sqrt{(x_2 - x_1)^2 + (y_2 - y_1)^2} \),其中 \( x_1, y_1 \) 是起始位置的坐标,\( x_2, y_2 \) 是末位置的坐标。
5. 如果物体沿直线从A点到B点,再从B点到C点,那么物体的总位移是\( \text{AB} + \text{BC} \),但总路程是\( \text{AC} \)。
三、计算题6. 一个物体从坐标原点出发,先向东移动了3米,然后向北移动了4米。
求物体的位移大小和方向。
7. 物体从A点出发,先向西移动了5米到达B点,再向南移动了6米到达C点。
如果物体最终返回到A点,求物体的总位移大小。
四、简答题8. 解释为什么位移和路程在某些情况下可以不同,并给出一个实际的例子。
9. 描述在二维平面上,如果物体沿直线从一点移动到另一点,其位移和路程是否相等,并解释原因。
五、应用题10. 一个运动员在田径场的跑道上跑了一个400米的圈,求运动员的总路程和位移大小。
11. 假设有一个点光源,一个物体从光源的正东方向移动到正西方向,移动了10米,然后从正西方向返回到正东方向,再移动了5米。
第七章 矩阵位移法一、是非题1、单元刚度矩阵反映了该单元杆端位移与杆端力之间的关系。
2、单元刚度矩阵均具有对称性和奇异性。
3、局部坐标系与整体坐标系之间的坐标变换矩阵T 是正交矩阵。
4、结构刚度矩阵反映了结构结点位移与荷载之间的关系。
5、用 矩 阵 位 移 法 计 算 连 续 梁 时 无 需 对 单 元 刚 度 矩 阵 作 坐 标 变 换。
6、结 构 刚 度 矩 阵 是 对 称 矩 阵 ,即 有K i j = K j i ,这 可 由 位 移 互 等 定 理 得 到 证 明 。
7、结构刚度方程矩阵形式为:[]{}{}K P ∆=,它是整个结构所应满足的变形条件。
8、在直接刚度法的先处理法中,定位向量的物理意义是变形连续条件和位移边界条件。
9、等效结点荷载数值等于汇交于该结点所有固端力的代数和。
10、矩阵位移法中,等效结点荷载的“等效原则”是指与非结点荷载的结点位移相等。
11、矩阵位移法既能计算超静定结构,也能计算静定结构。
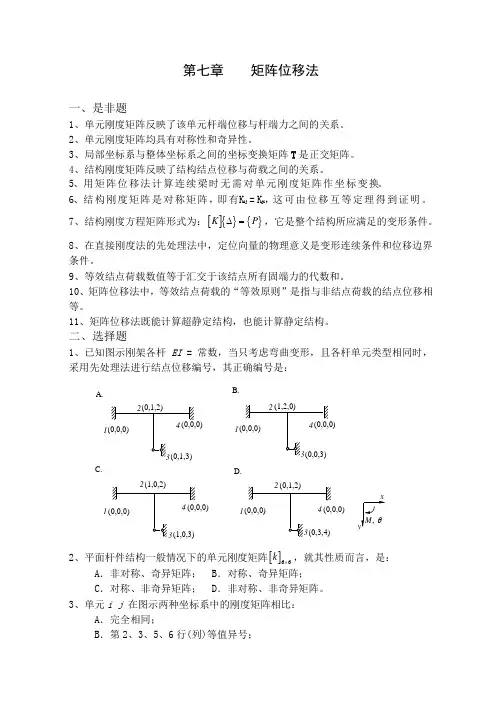
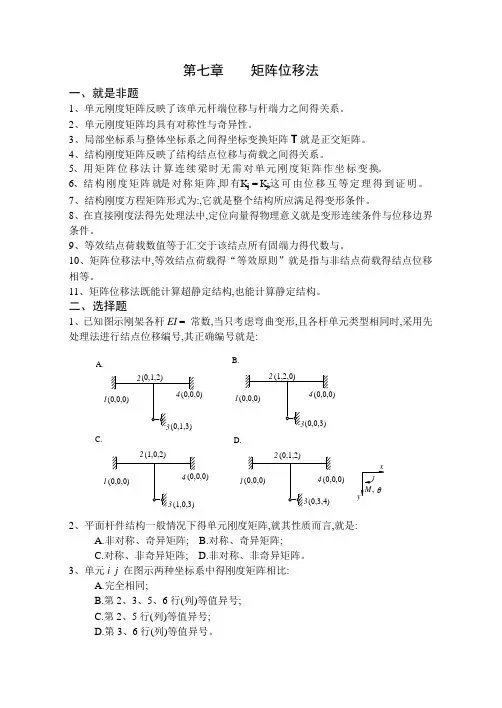
二、选择题1、已知图示刚架各杆EI = 常数,当只考虑弯曲变形,且各杆单元类型相同时,采用先处理法进行结点位移编号,其正确编号是:(0,1,2)(0,0,0)(0,0,0)(0,1,3)(0,0,0)(1,2,0)(0,0,0)(0,0,3)(1,0,2)(0,0,0)(0,0,0)(1,0,3)(0,0,0)(0,1,2)(0,0,0)(0,3,4)A.B.C.D.21341234123412342、平面杆件结构一般情况下的单元刚度矩阵[]k 66⨯,就其性质而言,是: A .非对称、奇异矩阵; B .对称、奇异矩阵; C .对称、非奇异矩阵; D .非对称、非奇异矩阵。
3、单元i j 在图示两种坐标系中的刚度矩阵相比:A .完全相同;B .第2、3、5、6行(列)等值异号;C .第2、5行(列)等值异号;D .第3、6行(列)等值异号。
xi4、矩阵位移法中,结构的原始刚度方程是表示下列两组量值之间的相互关系: A .杆端力与结点位移; B .杆端力与结点力; C .结点力与结点位移; D .结点位移与杆端力 。
第七章 矩阵位移法一、就是非题1、单元刚度矩阵反映了该单元杆端位移与杆端力之间得关系。
2、单元刚度矩阵均具有对称性与奇异性。
3、局部坐标系与整体坐标系之间得坐标变换矩阵T 就是正交矩阵。
4、结构刚度矩阵反映了结构结点位移与荷载之间得关系。
5、用 矩 阵 位 移 法 计 算 连 续 梁 时 无 需 对 单 元 刚 度 矩 阵 作 坐 标 变 换。
6、结 构 刚 度 矩 阵 就是 对 称 矩 阵 ,即 有K i j = K j i ,这 可 由 位 移 互 等 定 理 得 到 证 明 。
7、结构刚度方程矩阵形式为:,它就是整个结构所应满足得变形条件。
8、在直接刚度法得先处理法中,定位向量得物理意义就是变形连续条件与位移边界条件。
9、等效结点荷载数值等于汇交于该结点所有固端力得代数与。
10、矩阵位移法中,等效结点荷载得“等效原则”就是指与非结点荷载得结点位移相等。
11、矩阵位移法既能计算超静定结构,也能计算静定结构。
二、选择题1、已知图示刚架各杆EI = 常数,当只考虑弯曲变形,且各杆单元类型相同时,采用先处理法进行结点位移编号,其正确编号就是:(0,1,2)(0,0,0)(0,0,0)(0,1,3)(0,0,0)(1,2,0)(0,0,0)(0,0,3)(1,0,2)(0,0,0)(0,0,0)(1,0,3)(0,0,0)(0,1,2)(0,0,0)(0,3,4)A.B.C.D.21341234123412342、平面杆件结构一般情况下得单元刚度矩阵,就其性质而言,就是:A.非对称、奇异矩阵;B.对称、奇异矩阵;C.对称、非奇异矩阵;D.非对称、非奇异矩阵。
3、单元i j 在图示两种坐标系中得刚度矩阵相比:A.完全相同;B.第2、3、5、6行(列)等值异号;C.第2、5行(列)等值异号;D.第3、6行(列)等值异号。
4、矩阵位移法中,结构得原始刚度方程就是表示下列两组量值之间得相互关系:A.杆端力与结点位移;B.杆端力与结点力;C.结点力与结点位移;D.结点位移与杆端力。
位移位移定理练习题位移定理练题位移定理是力学中的一个重要原理,在求解物体运动时经常会用到。
下面是一些位移定理的练题,以帮助你加深对该原理的理解。
题目一一辆汽车以匀速行驶,速度为25 m/s。
如果它在10秒内行驶的距离为多少?根据位移定理,位移(s)等于速度(v)乘以时间(t)。
因此,s = v × t = 25 × 10 = 250m。
答案:位移为250米。
题目二一架飞机以加速度2 m/s²匀加速起飞。
如果飞机起飞所经过的距离为800米,求起飞所用的时间。
根据位移定理,位移(s)等于初速度(v₀)乘以时间(t)加上加速度(a)的一半乘以时间的平方。
因此,s = v₀t + (1/2)at²。
已知v₀ = 0(起始速度为0),a = 2 m/s²,s = 800米。
代入上述公式,800 = 0 × t + (1/2) * 2 * t²。
化简得到2t² = 800,解得t = √(800/2) ≈ 20。
答案:起飞所用的时间为20秒。
题目三一个物体从静止开始匀加速运动,经过4秒钟位移为40米。
求该物体的加速度。
根据位移定理,位移(s)等于初速度(v₀)乘以时间(t)加上加速度(a)的一半乘以时间的平方。
因此,s = v₀t + (1/2)at²。
已知v₀ = 0(起始速度为0),s = 40米,t = 4秒。
代入上述公式,40 = 0 × 4 + (1/2) * a * 4²。
化简得到4a = 40,解得a = 40/4 = 10。
答案:物体的加速度为10 m/s²。
题目四一个物体以初速度10 m/s匀减速运动,经过5秒钟位移为30米。
求该物体的加速度。
根据位移定理,位移(s)等于初速度(v₀)乘以时间(t)减去加速度(a)的一半乘以时间的平方。
因此,s = v₀t - (1/2)at²。
位移法复习题位移法复习题位移法是力学中的一种重要方法,用于求解物体在受力作用下的运动情况。
它通过分析物体的位移来推导出物体的速度和加速度等运动参数。
在学习位移法时,我们需要掌握一些基本的概念和方法,并通过练习题来加深理解。
下面,我们将通过一些典型的位移法复习题来巩固知识。
1. 一辆汽车以20 m/s的速度匀速行驶了5秒钟,求汽车的位移。
解析:根据位移的定义,位移等于速度乘以时间。
所以汽车的位移等于20 m/s × 5 s = 100 m。
2. 一个物体以2 m/s²的加速度匀加速运动了10秒钟,求物体的位移。
解析:根据匀加速运动的位移公式,位移等于初速度乘以时间加上加速度乘以时间的平方的一半。
所以物体的位移等于0 m/s × 10 s + 2 m/s² × (10 s)² / 2 = 100 m。
3. 一个自由落体物体从静止开始下落,求物体下落5秒钟后的位移。
解析:自由落体物体的加速度等于重力加速度,即9.8 m/s²。
根据自由落体运动的位移公式,位移等于初速度乘以时间加上加速度乘以时间的平方的一半。
由于物体从静止开始下落,所以初速度为0 m/s。
所以物体的位移等于0 m/s × 5 s + 9.8 m/s² × (5 s)² / 2 = 122.5 m。
4. 一个物体以10 m/s的速度向上抛出,求物体到达最高点时的位移。
解析:当物体到达最高点时,它的速度为0 m/s。
根据物体的运动规律,物体到达最高点时的位移等于它的初速度乘以时间。
所以物体到达最高点时的位移等于10 m/s × (10 m/s / 9.8 m/s²) = 10.2 m。
5. 一个物体以5 m/s的速度向上抛出,求物体落地时的位移。
解析:当物体落地时,它的位移等于它的初速度乘以时间加上加速度乘以时间的平方的一半。


第一章机动分析一、判断题1.( X ) 2.( X ) 3.( X ) 4.( O )二、选择题5.(B) 6.(D) 7.(C) 8.(A) 9.(A) 10.(A) 11.(C) 12.(B) 13.(A)三、填空题14.几何瞬变15. 或不定值16.两刚片用不完全相交及平行的三根链杆连接而的体系。
17.几何不变且无多余约束。
四、分析与计算题18.几何不变且无多余约束。
19.瞬变。
20.几何不变无多余约束。
21.几何不变无多余约束。
22.瞬变。
23.几何不变无多余约束。
24.可变。
25.几何不变无多余约束。
26.几何不变无多余约束。
27.几何不变,有两个多余约束。
28.几何不变无多余约束。
29.几何不变无多余约束。
30.几何不变无多余约束。
1第二章静定梁与静定刚架一、判断题1.(O)2.(O)3.(X)4.(X)5.(X)6.( X ) 7.( O ) 8.( O ) 9.( X ) 10.( O ) 11.( O )二、选择题12.(C)13.(D)14.(A)15.( C )16.( D )17.( C ) 18.( C )19.(C)20.(B)21.(C )三、填空题22.不变,零23.无关24.位移,变形,内力25.在任意荷载作用下,所有反力和内力都可由静力平衡条件求得确定的、有限的、唯一的解答。
26.0 ,027.20kN·m ,下28.75kN·m ,右29.2Pa,右30.0.5pa ,上31.Pa, 左四、分析与计算题32.33.20.5q lq l28M图PaPaPaPaPaPaPaM图2334. 35.图(k N m 1616M RA ql H 0M B B ql 0.5( )图M Bql 0.522______A36. 37.1050203050().图 M kN m DC BE Aql20.5ql 2ql20.5图M DC B A38. 39.图M m CA B().图 M kN m 2020AB 5DC40. 41.BCD40120图 M ()kN .m A 408040图M PlPl2Pl ABC D442. 43.().图 M kN m 4441535 图M ql 28ql 223ABDC44. 45.()图 M kN .m AB 151515151515C DE F 1515Pa 2/3图Pa 2/3Pa 2/3Pa 2/3M AB46. 47.Pa 2/3Pa /34AB图MPaPa0.5P a0.5P a图M48. 49.PaPaPaPa图M图M550. 51.ql20.5ql20.5ql20.5ql20.5图M图M mmm m52. 53.P aPa0.5P a0.5P a0.5M 图m0.5m54. 55.mmmmqPM 图56. 57.4040404020kN1k N 1k N3k N1k N Q 图 (3.5)N 图 (3.5)658.PPPQ 图N 图59.qaqa qa /2qaqa qa/2qa /232Q 图 N 图60. 61.PPa 图M ACDB图M qa 22qa 2262.ABC ED F Pa Pa 13237第三章 静 定 拱一、判断题1.(X ) 2.(O )3. ( O )二、选择题4.(C )5.(B ) 6.(D ) 7.(B ) 8.( B ) 9.( D )三、填空题10. 0 , 011. 7.5kN ·m , 下四、分析与计算题12. 00K K K M Q N qr ===-13. 20(13)5(31)5(31)K K K M kN m Q kNN kN =-⋅=-=-+14. 100105K K K M kN m Q N kN =-⋅==-8第四章 静定桁架一、判断题1.(O ) 2.(O ) 3.(X ) 4.(X ) 5.(X ) 6.(X )二、选择题7. ( D ) 8.( D ) 9.( D ) 10.(D ) 11.(D )三、填空题12. 0 , 013. BC , FG , ED , DB , DF 14. 1.414P , -2P 15. 0.5P ( 拉 ) 16. P四、分析与计算题17. 18.图M 2Pa2Pa 2Pa Pa6Pa 6ABC D E FG图M 2qa 22qa 22qa 22qa 2qa219.9ABDC806020M ()kN .m 图20. 14/3N P = 21. N 10= N P 22=22. N 1=PN P 22=-23. N 125kN =-N 2=44kNN 310kN =24. N 10= N P 2233=/ 25. N 10= N P 2= N P 322=/ 26. N P 12= N P 22=-27. N P 115=-. N P 2=28. N P 106=. N P 2=29. 1222N P N P =-=30. 1234101052102N N N N =-==-=-kN , kN , kN , kN 31. N P 1=-32.(kN)(kN)(kN)30280/3350/31404050140/3140/320M 图图图Q N 203033.10444().4图 M kN m 链 杆 轴 力, N = -2 kN34.Q 图(kN)1515().图 M kN m 555512.55157.512.52N 图(kN)1535.1502.5272.5452.52150100250250N 图 (kN)903015028026010100Q 图(kN )图 M (kN .m )11第五章 图 乘 法一、判断题1.( X ) 2.( X ) 3.( X ) 4.( X ) 5.( O )二、选择题6.( C ) 7.( C ) 8.( C ) 9.( C ) 10.( B ) 11.( A ) 12.( A ) 13.( C )三、填空题14.(////)ac ad bd bc l 3636+++⋅ 15.()ql EI 424/ ()→ 16.733ql EI /()17.5482Pa EI /() (逆 时 针) 18.4Pa/EA (↓) 19.qa EI qa EA 330625/./+四、分析与计算题20. ()()()C EI Pl h Plh EI ϕ=-⋅⋅⋅=-113322//// ()21. ()AVPl EIh l ∆=+22916// (↓)1222. ()AV Pl EI ∆=↓29243/ 23. ()BH EI ∆=-←11340/ 24. A φ=00016.rad ()25. ()CH Pl EI ∆=-←19483/() 26. ()DH ∆=→00084.m27. K D =4860/EI ()28. AB Pl EI ϕ=492/ ()29. AB Pl EI H ∆=35813/() ()30. BVE I 2M l2=∆(31. ()ϕD MlEI =632.ϕB = 15.625( )EI33. ∆AH = - 5 P a 3 / E I ( ← )34. ∆BH = - 8Pa 3/ E I ( ← ) 35. ϕD EI =835/ () 36.ϕD = /2()52P l E I37.3ϕC 左 =13 /162ql EI ()38. ()∆EV ql EI =-↑74324/()39. ϕAB EA =2414. ( )1340. ()∆CV Pa EA =↓2414.41. ϕC Pa EI P EA =+532752/./() 42. ∆AV EI EA =+3101875(↓)43. ()ϕC EI EI EI =++=301333408333..() 44. ∆C D H cm =0795.()45. ∆∆CH R =-⋅=∑--⋅=()1∆∆ (→)46. ()ϕB R l l =-⋅=--=∑∆∆∆0505././ ()14第六章 力 法一、判断题1.(X) 2.(X) 3.(X) 4.(X) 5.(X) 6.(X) 7.(X)二、选择题8.(B) 9.(D) 10.(A) 11.(C) 12.(C)三、填空题13.6次14. (2+1.414)Pl/EA 15. -256/EI , 0 16.l EA l EI //()+13123 17.l EA h EI //()+233 18.0 , 0 , 0四、分析与计算题20. δ1145=./EI ; ∆1405P EI =-/ 21. 111234/765/P E I E I δ=∆=- 22.152 /2Pl图M PPlPl /2Pl 基 本 体 系PX 123.X 1X 1基 本 体 系 8322432248图M ()kN .m ()分 2()分 324.X 1413431基本体系图 M ()kN .m kN .m4kN .m25.X 1X 14522.5X 2X 2基 本 体 系 图M ()kN .m ()分 2()分 326.16基本体系31.42222.89X 1图 M ()kN .m27.qa /2qa 2/242 /122 /242 /242 /242基本体系qa qa qa qa qa a /21X 图 M ()kN .m /122qa28.X 1X 2=0ql 2/4ql 2/2基本体系 M 图 X 1ql 2/2ql 2/4(2分 )(3分 )29.175050图 M ()kN .m30.q1EI =基 本 体 系X 432720图 M ()kN .m 504231.X 2X 1基 本 体 系图 M ()kN .m 17. 8231. 6826. 6432. 33.M 图1.77P1.77P3PPP3P1.23P 1.23P4.234.23-12.796-12.8-13.870.5340.5346.1337.20.534a-a a -bb c N (k N )a b c =-=-=0755********...34.120.4375 1.417N P N P =-=35.1810kNX 1基本体系( 2分 )3030M 图·()kN m ( 3分)36.X1图M X 2q基 本 体 系8.71 6.773.8716.52 1.87qqqqq37.EI/l X=X =1M 1图图M N 图 1lα1分 )(2分 )(7.521138.l图M X 11=()34EI l θ基 本 体 系39.1922.2X=图M R=kN .m-3.7kN X=1-1(2分 )(4分 )基 本 体 系40.()()()()()()()334164 24hA h EI Ph h EI h Ph h PhEI ∆=⋅⋅-⋅⋅⋅=第七章 位 移 法一、判断题:1.(X ) 2.(X ) 3.(O ) 4.(O ) 5.(O ) 6.(X )7.(O ) 8.(X ) 9.(X )二、选择题10.(B )三、填空题11. 0 12. 4 13. 273EI l / 14. 0 15. -6l 016. -Pl17. r 22 = 4.5 R P 1 = -8 18. r 11 = 13 R P 1 = 020四、分析与计算题19. r EI l 1110=/ R ql P 12316=-/ 20. r 22 = 3EI R P 2 = 021.ql /8ql 2/8M Z 12图22.Z 1101010101010(kN m).M 图23.Z 117.417.47.74(kN m).M 图24.Z 1M Pl/4Pl/4Pl/4Pl/4图25.21Z 1hhhha aM a= Pl/h= Pl/图12432717226.Z 12- Pl+ ql 192962Pl+ql Pl-ql 2192Pl/M 35315图827.P /23 图P /23P /23P /23M28.Z 1/9/9/9/9/9245图Pl Pl Pl Pl M Pl29.2210kN Z 1Z 2基 本 体 系20/320/320/310/3图 (kN m).M30.Z 110kN/m10.665.3320.1314.2111.25 5.33基 本 体 系图 (kN m)M .Z 231.Z 1基 本 体 系=10kN/m 80kNZ 248.648.68037.0362.8125.78图 M ()kN .m q32.Z 1基 本 体 系图(kN m)4kN/mZ 225/1450/775/14M .33.23140/13160/1310kN10kN/m320/1320Z 1Z 2基 本 体 系 M 图 (kN ·m ) 34.7101010M 图 ( 2332ql /) 35.Z 2图 (kN m).=10kN/m5.42.961.481.4811.8311.83简 化 图q M Z 136.2kN/mZ 1Z 2基 本 体 系图 ( N m).1.470.421.262.740.21M 4k37.24P /2P/2Z 1Z 2基 本 体 系5 /185 /18/6/62 /92 /9/18/18M 图Pl Pl PlPlPlPl Pl Pl简 化38.EI 1= 图=11/4 3 /420/320/37.540/3M EI3 3 /8EI3 /8EIZ ∞EI39.图M40.Z 1图 (kN m)1cm193.5918211.5.M第八章力矩分配法一、判断题1.( X ) 2.( O ) 3.( X ) 4.( X )二、选择题5.( B ) 6.( B ) 7.( C ) 8.( C ) 9.( D ) 10.( D )三、填空题11.012.0 , M AB2, MAB13.M/2 下14.8 kN·m15.1/3 ,1/3 ,1/316.0 ,1 ,0.2252617.i EI l =,()μBA i i i =+=34337,μBC =47,μBD =0四、分析与计算题18. μAD =19 , μAC =49 , μAB =49, μBA = 1 , μBE = 0M BE F = -160 kN ·m19. μμAB AC ==3812/,/, μμAD AE ==180/,M k N m M AB AC FF .,,=⋅=750 M M kN m AD AE FF ,==⋅02020. μμμμAD AC FD FG ====05. μμμDA DE DF ===13/,M kN m DF F,=-⋅375 MkN mFDF=-⋅37521. 14.7BC M kN m =-⋅ 22. 40AC M kN m =-⋅ 23. 0.3EB M kN m =⋅ 24. 2BA M kN m =⋅ 25.27MF2 分 ( )M 图 kN m .( )3 分( )2 分( )5 分( )1/21/2-1BA BCCB CD DC0.50.51/32/3-40-2013.3326.67-13.3313.33-6.67-6.67-3.331.111.112.22-1.11-0.56-0.56-7.217.2125.56-25.56-34.4434.44A B CD25.567.217.213.626.BDAC10.8430.8347.0830.83202023.5523.5510.845.425.42对 称 结 构 , 对 称 荷 载 , 取 一 半 结 构 计 算M 图 kN m .( )27.28M 图 kN m .( )CABDEBA BE EB μMFDA AD AC AB 11.54-1.62 -2.43 2.5 分 ( )2.5 分( )7 分( )6/133/134/1345-12012034.6217.3123.08-26.31-52.62-78.9212.14 6.078.14.0546.7668.38-115.1381.35-81.3581.3546.7668.38115.1323.3840.680.40.628.μM F5.126.6901234521 23-9090454.238.594.3 4.849.68-2.6-5.21-3.93-1.970.86 1.75+1.975.09-5.0926.5690-90( 2.5 分 )( 2.5 分 )( 7 分 )0.330.670.570.4310-12.83-25.65-19.35-9.68图 M ()kN .m -26.564345343229.7.4CB M kN m =-⋅30.29对 称 性 取 半 结 构1.891.055.712.86307.8722.138.66A D EFB CAD AB BA BC BEBF 301.5-7.5-22.5-11.251.492.983.980.99 1.79-0.37-1.12-0.560.170.230.060.1-7.87-22.13-8.66 5.71 1.051.89μ 3 分 ( )3 分( )8 分 ( )0.250.750.30610.4082 0.102 0.1837M 图 (kN.m)31. 16.85CB M kN m =⋅ 32.kN m .( )M 图 2.231.934.167.895AD μμAB i AD AB S AB i EI l=i/=i AC i ==6i ,,,,AC μ= 0.257,= 0.446 ,= - 7.5kN m .,DA M = - 3.75kN m .,= 4i 32i =0.297M AD FF,AC S =⨯3,AD S =6i ,1.123033.CD B A EF 56.8518.960图 M ()kN .m 对 称 性 取 半 刚 架 ,u MFCA AC AB BA BF BE EB 0.50.50.40.30.3-4040-60-604866-618189-1.8-3.6-2.7-2.72.70.90.918.9-18.953.43.3-56.7-63.3( 4 分 )( 3 分 ) ( 3 分 )(8 分 )53.7 3.1563.1518.934. 3.31DC M kN m =⋅31第九章 影响线及其应用一、判断题1. ( X ) 2.( O ) 3.( X ) 4.( X ) 5.( O ) 6.( X ) 7.( X )二、选择题8.( C ) 9.( B ) 10.( C ) 11.(C ) 12.(C ) 13.(D ) 14.(A )三、填空题15. 结 构 在 恒 载 及 活 载 作 用 下 , 各 截 面 内 力 最 大 最 小 值变 化 范 围 图 。
位移法一、判断题1.位移法与力法的主要区别是,位移法以结点位移为基本未知量,而力法则以多余未知为基本未知量。
()2. 位移法的基本未知量包括结点转角和独立结点线位移,其中结点转角数等于结构中所有刚结点的数目。
()3.位移法中杆端弯矩正负号的规定与作弯矩图时的规定相同。
()4.利用结点或横梁的平衡条件建立的平衡方程式称作位移法的基本方程。
()5.独立结点线位移的数目,对于多层刚架(无侧向约束)等于刚架的层数,对于复杂刚架等于为使铰化结点后体系成为几何不变体系所需增加的链杆数目。
()6.位移法的基本未知量是结构的多余约束力。
()7.杆端弯矩与结点转角、在垂直杆轴线方向的相对线位移及固端弯矩之间的关系式,称为转角位移方程。
()8.位移法的基本未知量是结构的多余约束力()。
9.用位移法计算图1所示结构时,其基本未知量有3个()。
图 110.位移法只能用来解超静定结构。
()二、选择题1.试确定下面结构的位移法基本未知量的个数:()A.θ=1,Δ=1B.θ=2,Δ=2C.θ=2,Δ=1D.θ=1,Δ=2三、填空题1.力法和位移法是解超静定结构的两种基本方法。
它们的主要区别在于力法是以____________为基本未知量,而位移法则以____________作为基本未知量。
2.位移法基本未知量包括____________和____________。
结点转角未知量的数目等于该结构的____________。
独立结点线位移的数目,对于多层刚架等于刚架的____________ ,对于复杂刚架等于为使铰化结点后体系成为几何不变体所需增加的____________。
3.杆端弯矩与____________及 ____________间的关系式称为转角位移方程。
4.结构的刚结点被固定后,各杆在荷载作用下的杆端弯矩和杆端剪力称为____________和____________。
5.图2所示刚架用力法计算时的基本未知量为____________,用位移法计算时的基本未知量为____________,为了使计算简化应选用____________。
位移法习题答案位移法是力学中的一种重要方法,用于求解刚体或弹性体的位移和变形。
它通过建立坐标系和运用力平衡条件,将问题转化为求解位移的数学问题。
本文将通过几个典型的位移法习题,来展示位移法的应用和解题思路。
第一个习题是关于简支梁的弯曲变形。
考虑一个长度为L的简支梁,在梁的中点施加一个集中力F。
我们的目标是求解梁的弯曲变形。
首先,我们需要建立坐标系。
假设梁的左端为原点O,梁的水平方向为x轴正方向,竖直向上为y轴正方向。
选择一个合适的参考点A,将其坐标设为(x, y)。
接下来,我们需要运用力平衡条件。
考虑梁上的一个微小段dx,其长度为dl。
由于梁是简支的,我们可以得到以下平衡方程:∑F_x = 0: -N(x+dx) + N(x) + F = 0∑F_y = 0: T(x+dx) - T(x) - dl*w = 0其中,N(x)和T(x)分别表示梁上某一点处的法向力和切向力,w表示单位长度的梁的重力。
将上述方程进行展开,并忽略高阶微小量,我们可以得到:-dN/dx*dx + F = 0dT/dx*dx - dl*w = 0由于dx是一个无穷小量,我们可以将上述方程进行积分,得到:-N(x) + F*x + C_1 = 0T(x) - dl*w*x + C_2 = 0其中,C_1和C_2是积分常数。
接下来,我们需要确定积分常数C_1和C_2。
考虑梁的边界条件,即在梁的两端点处,梁的位移为零。
根据这个条件,我们可以得到:N(0) = 0: C_1 = 0N(L) = 0: -F*L + C_1 = 0解上述方程组,我们可以得到C_1 = 0和C_2 = dl*w*L。
最后,我们可以得到梁上任意一点的位移表达式:y(x) = ∫(0 to x) [T(x')/dl*w*x' - dl*w*x'] dx'将T(x)和C_2的表达式代入,我们可以得到:y(x) = ∫(0 to x) [(dl*w*x' - dl*w*L)/dl*w*x' - dl*w*x'] dx'= ∫(0 to x) (1 - L/x') dx'对上述积分进行计算,我们可以得到:y(x) = x - L * ln(x)通过上述推导,我们成功地求解了简支梁的弯曲变形问题。
位移法一、判断题1.位移法与力法的主要区别是,位移法以结点位移为基本未知量,而力法则以多余未知为基本未知量。
()2. 位移法的基本未知量包括结点转角和独立结点线位移,其中结点转角数等于结构中所有刚结点的数目。
()3.位移法中杆端弯矩正负号的规定与作弯矩图时的规定相同。
()4.利用结点或横梁的平衡条件建立的平衡方程式称作位移法的基本方程。
()5.独立结点线位移的数目,对于多层刚架(无侧向约束)等于刚架的层数,对于复杂刚架等于为使铰化结点后体系成为几何不变体系所需增加的链杆数目。
()6.位移法的基本未知量是结构的多余约束力。
()7.杆端弯矩与结点转角、在垂直杆轴线方向的相对线位移及固端弯矩之间的关系式,称为转角位移方程。
()8.位移法的基本未知量是结构的多余约束力()。
9.用位移法计算图1所示结构时,其基本未知量有3个()。
图 110.位移法只能用来解超静定结构。
()二、选择题1.试确定下面结构的位移法基本未知量的个数:()A.θ=1,Δ=1B.θ=2,Δ=2C.θ=2,Δ=1D.θ=1,Δ=2三、填空题1.力法和位移法是解超静定结构的两种基本方法。
它们的主要区别在于力法是以____________为基本未知量,而位移法则以____________作为基本未知量。
2.位移法基本未知量包括____________和____________。
结点转角未知量的数目等于该结构的____________。
独立结点线位移的数目,对于多层刚架等于刚架的____________ ,对于复杂刚架等于为使铰化结点后体系成为几何不变体所需增加的____________。
3.杆端弯矩与____________及 ____________间的关系式称为转角位移方程。
4.结构的刚结点被固定后,各杆在荷载作用下的杆端弯矩和杆端剪力称为____________和____________。
5.图2所示刚架用力法计算时的基本未知量为____________,用位移法计算时的基本未知量为____________,为了使计算简化应选用____________。
结构力学第七章位移法1.引言结构力学是研究结构受力、变形和稳定性的力学分支。
在结构力学中,位移法是一种重要的分析方法,用于求解结构的变形和应力分布。
2.位移法的基本原理位移法是基于以下两个基本原理:(1)弹性体的受力状态可通过满足平衡条件来确定;(2)位移场的连续性条件,即位移场在结构内部要处处连续,边界上要满足给定的边界条件。
3.位移法的基本步骤位移法的基本步骤如下:(1)建立结构的受力模型,包括结构的材料性质、几何形状和边界条件等;(2)选取适当的位移函数形式,以确定位移场;(3)利用平衡方程和满足位移场连续性条件的边界条件,求解未知的位移和受力分布;(4)利用位移和受力分布计算结构的变形和应力分布。
4.位移法的应用位移法广泛应用于各种结构的力学分析,特别是对于复杂的非线性和不规则结构,位移法是一种常用的分析方法。
以下是一些常见的应用:(1)梁的挠曲分析:位移法可以用来求解梁的挠曲问题,通过选取合适的位移函数形式,可以得到梁的弯曲形状和弯矩分布。
(2)柱的稳定性分析:位移法可以用来求解柱的稳定性问题,通过选取合适的位移函数形式,可以得到柱的稳定性临界载荷和稳定形状。
(3)桁架结构的分析:位移法可以用来求解桁架结构的强度和刚度,通过选取合适的位移函数形式,可以得到桁架结构的内力和变形。
(4)地基基础的分析:位移法可以用来求解地基基础的变形和应力分布,通过选取合适的位移函数形式,可以得到地基基础的沉降和周边土体的应力分布。
5.位移法的优缺点位移法作为一种结构力学的分析方法,具有以下优点:(1)位移法适用于各种结构的力学分析,可以求解复杂的非线性和不规则结构问题;(2)位移法具有较强的适用性和灵活性,可以根据实际情况选取不同的位移函数形式;(3)位移法的计算步骤相对简单,易于实现。
然而,位移法也存在一些缺点:(1)位移法需要选取适当的位移函数形式,这对分析结果的准确性有较大影响;(2)位移法的计算过程较为繁琐,需要手动推导和求解方程组,耗费时间和精力。
第7章 位移法习 题7-1:用位移法计算图示超静定梁,画出弯矩图,杆件EI 为常数。
题7-1图7-2:用位移法计算图示刚架,画出弯矩图,杆件EI 为常数。
题7-2图.7-3:用位移法计算图示刚架,画出弯矩图,杆件EI 为常数。
题7-3图7-4:用位移法计算图示超静定梁,画出弯矩图。
.q2题7-4图7-5:用位移法计算图示刚架,画出弯矩图,杆件EI 为常数。
题7-5图7-6:用位移法计算图示排架,画出弯矩图。
题7-6图#7-7:用典型方程法计算7-2题,画出弯矩图。
7-8:用典型方程法计算7-3题,画出弯矩图。
7-9:用典型方程法计算7-5题,画出弯矩图。
7-10:用典型方程法计算图示桁架,求出方程中的系数和自由项。
10kN4E题7-10图7-11:用典型方程法计算图示刚架,求出方程中的系数和自由项。
题7-11图;7-12:用位移法计算图示结构,杆件EI 为常数(只需做到建立好位移法方程即可)。
题7-12图7-13:用位移法计算图示结构,并画出弯矩图。
;}10kNF7-14:用位移法计算图示结构,并画出弯矩图。
!题7-14图7-15:用位移法计算图示刚架,画出弯矩图。
题7-15图7-16:用位移法计算图示结构,并画出弯矩图。
F题7-16图7-17:用位移法计算图示结构,并绘弯矩图,所有杆件的EI 均相同。
题7-17图7-18:确定图示结构用位移法求解的最少未知量个数,并画出基本体系。
$(c )}(b )Aqq题7-18图7-19:利用对称性画出图示结构的半刚架,并在图上标出未知量,除GD 杆外,其它杆件的EI 均为常数。
.题7-19图7-20:请求出图示刚架位移法方程中的系数和自由项。
题7-20图7-21:利用对称性对图示结构进行简化,画出半刚架,并确定未知量,杆件的 EI 为常数。
¥原结构基本体系。
题7-21图7-22:对图示结构请用位移法进行计算,只要做到建立好位移法方程即可。
<题7-22图7-23:用位移法计算图示结构,并绘弯矩图。
位移法习题与答案位移法是结构力学中常用的一种分析方法,通过计算结构在外力作用下的位移,来求解结构的应力、应变和变形等问题。
在学习位移法时,习题与答案的练习是非常重要的,可以帮助我们加深对位移法的理解和掌握。
下面将给大家介绍一些位移法习题及其答案。
习题一:求解简支梁的弯矩分布已知一根长度为L的简支梁,受到均布载荷q作用,求解弯矩分布。
解答:首先,我们需要根据受力分析确定梁的反力。
对于简支梁,两个支座处的反力相等,且为qL/2。
接下来,我们可以利用位移法求解弯矩分布。
假设梁的弯矩分布为M(x),则根据位移法的基本原理,可以得到以下方程:d2M(x)/dx2 = -q对该方程进行两次积分,得到:M(x) = -q*x^2/2 + C1*x + C2由于梁两端是简支条件,即位移和转角为零,可以得到边界条件:M(0) = 0M(L) = 0代入上述方程,解得C1 = qL/2,C2 = -qL^2/2。
因此,弯矩分布为:M(x) = -q*x^2/2 + qL/2*x - qL^2/2习题二:求解悬臂梁的挠度已知一根长度为L的悬臂梁,受到集中力F作用在悬臂端点,求解梁的挠度。
解答:首先,我们需要根据受力分析确定梁的反力。
对于悬臂梁,端点处的反力只有一个,即为F。
接下来,我们可以利用位移法求解梁的挠度。
假设梁的挠度为δ(x),则根据位移法的基本原理,可以得到以下方程:d2δ(x)/dx2 = -F/(EI)对该方程进行两次积分,得到:δ(x) = -F*x^2/(2EI) + C1*x + C2由于梁端点处的位移为零,可以得到边界条件:δ(0) = 0dδ(x)/dx|_(x=L) = 0代入上述方程,解得C1 = 0,C2 = 0。
因此,梁的挠度为:δ(x) = -F*x^2/(2EI)习题三:求解悬臂梁的最大挠度已知一根长度为L的悬臂梁,受到均布载荷q作用,求解梁的最大挠度。
解答:首先,我们需要根据受力分析确定梁的反力。