机械设计基础第1章-运动简图
- 格式:ppt
- 大小:951.50 KB
- 文档页数:15
第1章机械系统的运动简图设计一、基本内容及要求本章学习的主要内容是:(1)平面运动副及其分类;(2)平面机构运动简图的绘制方法;(3)平面机构自由度的计算。
本章的学习要求:1. 掌握各种平面运动副的一般表示方法。
能较熟练看懂教材中的平面机构运动简图。
通过实验初步掌握将实际机构绘制成机构运动简图的技能。
2. 能够识别平面机构运动简图中的复合铰链、局部自由度和最常见的虚约束。
会运用公式计算平面机构的自由度并判断其运动是否确定。
看懂和绘制平面机构运动简图是本章的重点。
复合铰链、局部自由度和虚约束的判断是个难点。
只要求掌握教材中列举的几种实例,不宜在此花费过多时间。
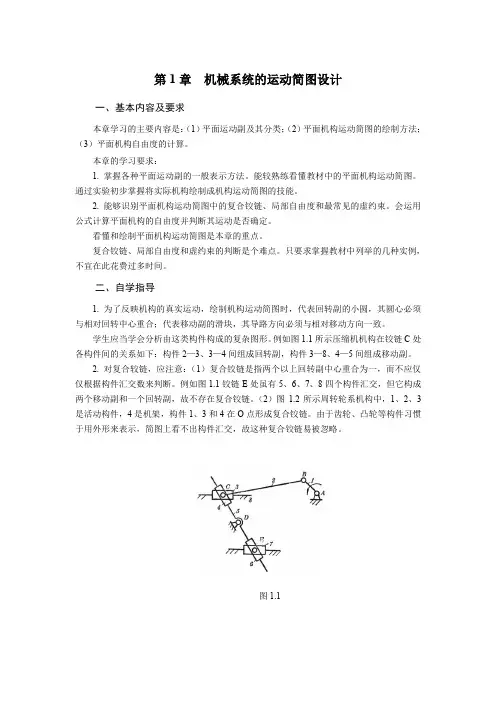
二、自学指导1. 为了反映机构的真实运动,绘制机构运动简图时,代表回转副的小圆,其圆心必须与相对回转中心重合;代表移动副的滑块,其导路方向必须与相对移动方向一致。
学生应当学会分析由这类构件构成的复杂图形。
例如图1.1所示压缩机机构在铰链C处各构件间的关系如下:构件2—3、3—4间组成回转副,构件3—8、4—5间组成移动副。
2. 对复合较链,应注意:(1)复合铰链是指两个以上回转副中心重合为一,而不应仅仅根据构件汇交数来判断。
例如图1.1铰链E处虽有5、6、7、8四个构件汇交,但它构成两个移动副和一个回转副,故不存在复合铰链。
(2)图1.2所示周转轮系机构中,1、2、3是活动构件,4是机架,构件1、3和4在O点形成复合铰链。
由于齿轮、凸轮等构件习惯于用外形来表示,简图上看不出构件汇交,故这种复合铰链易被忽略。
图1.13. 局部自由度在平面机构中主要出现在有滚子的场合。
在计算自由度时,为了防止错算构件数和运动副数,建议将图1.3,a中的滚子及其安装件固联为一整体,如图1.3,b所示。
图1.2 图1.34. 虚约束比较复杂,不要求深入研究,只要求理解和熟悉以下几个实例:(1)由两构件组成多个导路平行的移动副而产生的虚约束;(2)轮系中的对称部分产生的虚约束;(3)在平行四边形机构中加入一个与某边平行且相等的构件造成轨迹重迭而产生的虚约束(其他类型的轨迹重迭往往需要复杂的数学证明,可不深究);(4)“两构件间组成多个轴线重合的回转副”,这类虚约束通常出现在轮系的侧视图中,在运动平面内绘制的机构运动简图不会出现这类虚约束。

机械设计基础第1章运动简图ppt课件•运动简图概述•机构运动简图绘制方法•平面连杆机构运动简图分析•凸轮机构运动简图分析目•齿轮机构运动简图分析•轮系运动简图分析录运动简图概述01运动简图定义与作用定义运动简图是用简单的线条和符号来表示机构运动情况的图形。
作用能够清晰地表达机构的组成、运动传递关系和运动特性,是机械设计中的重要工具。
在保证能够准确表达机构运动情况的前提下,尽量简化图形,突出重点。
简化原则图形应清晰易懂,符号、线条和标注应符合规范。
清晰原则应完整地表达机构的组成、运动传递关系和运动特性,不遗漏任何重要信息。
完整性原则运动简图绘制原则机构运动分析机构设计优化机构故障诊断机构创新设计运动简图在机械设计中的应用通过运动简图可以直观地了解机构的运动情况,包括速度、加速度、位移等运动参数的变化规律。
通过对机构运动简图的观察和分析,可以发现机构中存在的故障和隐患,为故障诊断和维修提供依据。
根据运动简图的分析结果,可以对机构进行优化设计,提高机构的性能和使用寿命。
通过对不同机构运动简图的比较和分析,可以启发设计人员的创新思维,探索新的机构设计方案。
机构运动简图绘制方02法高副两构件通过点或线接触而构成的运动副。
高副能同时承受两个方向的力,具有较高的承载能力和较小的摩擦损失,但制造和维修较为困难。
机构组成机构是由刚性构件通过运动副连接而成的系统。
构件是机构中的运动单元,可以是单一的整体,也可以是几个零件组成的刚体。
运动副类型运动副是两构件直接接触并能产生相对运动的活动联接。
根据接触形式的不同,运动副可分为低副和高副两大类。
低副两构件通过面接触而构成的运动副。
根据两构件的相对运动形式,低副可分为转动副和移动副两种。
机构组成及运动副类型机构运动简图符号表示法构件的表示在机构运动简图中,构件用直线或折线表示,长度与实际构件的大小无关,只表示构件间的相对位置关系。
运动副的表示转动副和移动副分别用特定的符号表示。
第1章 平面机构的自由度和速度分析平面机构的自由度和速度分析组成机构自由度的计算构件运动副机构运动简图运动副、构件、常用机构表达方法定义平面机构自由度的计算:机构具有确定运动的条件:自由度等于原动件数固定构件(机架)低副从动件原动件(主动件)高副移动副回转副机构运动简图绘制hl P P n F--=23计算自由度应注意的事项局部自由度:滚子绕其中心的转动正确计算运动副的数量 (复合铰链等)虚约束存在的几种情况平面机构的速度分析:速度瞬心法瞬心机构瞬心数瞬心位置的确定机构的速度分析相对瞬心绝对瞬心2/)1(-=N N K 两构件不直接连接:三心定理两构件直接以运动副连接求构件的角速度和速度求两构件的角速度之比第2章 平面连杆机构曲柄摇杆机构曲柄滑块机构 演化机构杆机平面四杆机构的 基本型式按行程速比系数设计:利用机构在极位时几何关系已知连杆三个位置,求圆心法应用:夹紧装置中的防松构连面平基本型式及其演化双曲柄机构 双摇杆机构 导杆机构 摇块机构和定块机构 双滑块机构 偏心轮机构平面四杆机构 的主要特性急回特性急回运动行程速比速度变化系数 θθ-+==18018012v v K应用: 当θ>0时,K >1,机构有急回特性 压力角 压力角α:从动件受力方向和速度方向所夹锐角 传动角γ:压力角的余角传动角α越小,γ越大,机构的传力性能越好40min ≤γ,出现在曲柄与机架共线两位置之一和 死点曲柄为从动件时,曲柄与连杆共线位置, 0=γ 消除方法:利用飞轮或机构自身的惯性力 有整转副条件 ≤+max min l l 另两杆长度之和;整转副由最短杆与其邻边组成有整转副时, 曲柄摇杆机构—最短杆邻边为机架 双曲柄机构—最短杆为机架 双摇杆机构—最短杆对边为机架存在的不同机构四杆机构设计 作图法:解析法:利用几何关系列解析式求解实验法凸轮机构的分类凸轮机构及其设计推杆的运动形式基本概念:基圆、基圆半径、推程、升程、推程运动角、回程、回程运动角、休止、远休止角、近休止角、压力角。