连续波雷达介绍
- 格式:pdf
- 大小:70.02 KB
- 文档页数:3
各种类型雷达描述讲解雷达是一种利用电磁波进行探测、测量和判断目标存在及其位置、运动状态等信息的仪器。
根据其工作原理、用途和性能等不同,雷达可以分为多种类型。
下面将对各种类型的雷达进行详细讲解。
1. 相控阵雷达(Phased Array Radar)相控阵雷达是一种通过控制大量天线单元的相位和振幅,从而改变发射和接收波束方向或形状的雷达系统。
相对于传统雷达,相控阵雷达具有较高的目标探测率、方位精度和抗干扰能力。
它广泛应用于天气雷达、航空管制雷达和军事雷达等领域。
2. 同步脉冲雷达(Synchronous Pulse Radar)同步脉冲雷达是一种雷达系统,它利用脉冲信号与回波信号的同步关系来测量目标的距离。
该雷达系统具有较好的测距精度,适用于测量目标与雷达的距离较远的应用场景,如航天、航空和海洋导航等。
3. 连续波雷达(Continuous Wave Radar)连续波雷达以连续的电磁波信号进行发射与接收,通过测量回波信号与发射信号的频率差异来计算目标的相对速度。
连续波雷达主要应用于测速雷达、防撞雷达以及距离测量等领域。
4. 天气雷达(Weather Radar)天气雷达是一种特殊类型的雷达系统,用于监测大气中的天气现象,如降雨、雷暴和风暴等。
它可以通过测量回波的强度和频率分析,得出天气的类型、强度和运动情况等。
天气雷达在天气预报、气象监测和空中交通控制等领域起到重要作用。
5. 合成孔径雷达(Synthetic Aperture Radar,SAR)合成孔径雷达是利用航天器或飞机在运动中合成一个长虚拟天线孔径,从而产生高分辨率的雷达图像。
它主要用于地面目标检测和监测,如地质勘探、地表变形监测和林业资源观测等。
合成孔径雷达能够克服大气、云层和深度研究等问题,以获取高精度的地表信息。
6. 目标识别雷达(Target Recognition Radar)目标识别雷达是一种能够识别雷达回波中的目标特征,并据此判断目标的类型、形状和材料等信息的雷达系统。
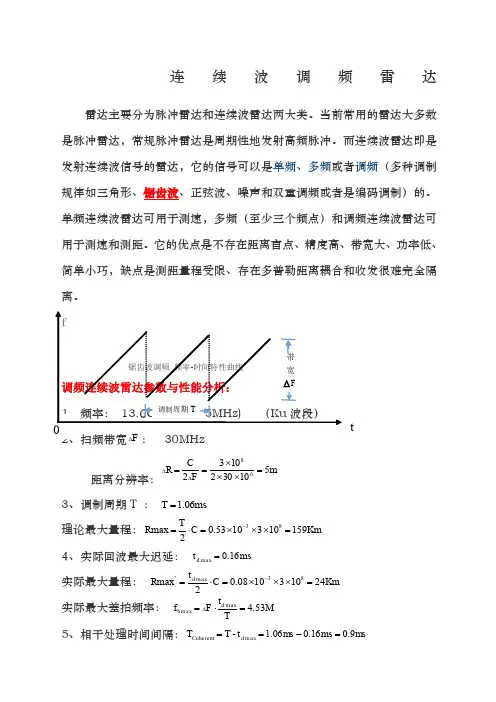
连续波调频雷达雷达主要分为脉冲雷达和连续波雷达两大类。
当前常用的雷达大多数是脉冲雷达,常规脉冲雷达是周期性地发射高频脉冲。
而连续波雷达即是发射连续波信号的雷达,它的信号可以是单频、多频或者调频(多种调制规律如三角形、锯齿波、正弦波、噪声和双重调频或者是编码调制)的。
单频连续波雷达可用于测速,多频(至少三个频点)和调频连续波雷达可用于测速和测距。
它的优点是不存在距离盲点、精度高、带宽大、功率低、简单小巧,缺点是测距量程受限、存在多普勒距离耦合和收发很难完全隔离。
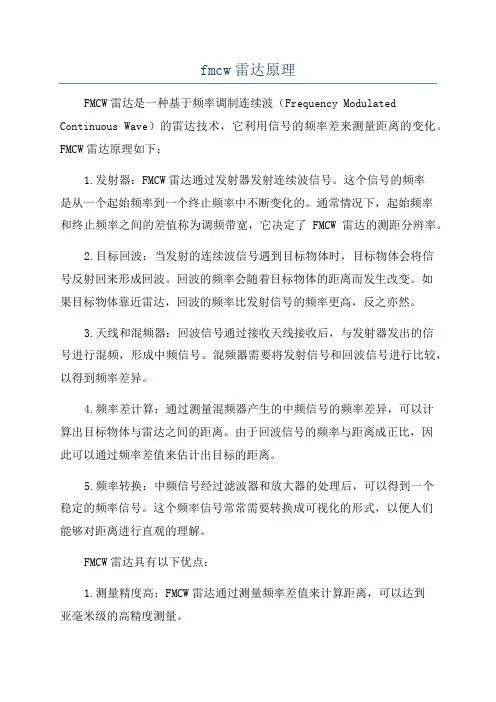
f锯齿波调频 频率-时间特性曲线调频连续波雷达参数与性能分析:1、频率: 13.6GHz (±15MHz) (Ku 波段)2、扫频带宽F ∆: 30MHz距离分辨率:m F C R 510302103268=⨯⨯⨯==∆∆3、调制周期T : ms 06.1=T理论最大量程:Km C TR 1591031053.02max 83=⨯⨯⨯=⋅=- 4、实际回波最大迟延: s d m 16.0t max =实际最大量程: Km C R d 241031008.02t max 83max=⨯⨯⨯=⋅=-‘实际最大差拍频率: M TtF d b 53.4f max max =⋅=∆5、相干处理时间间隔:ms s d 9.0m 16.0m s 06.1t -T T max Coherent =-==调制周期T带宽 Ftf锯齿波调频 频率-时间特性曲线可采点数: 36000m 9.040T Fs N Coherent =⋅=⋅=s MHz实际频率分辨率: Hz MHzN Fs111136000400f === 对应的实际距离分辨率:m F C T R89.51030211111031006.120f 683=⨯⨯⋅⨯⨯⨯=⋅⋅=∆∆‘ (量程越小,差拍频率越小,可获得的越大的相干处理时间,能该晒距离分辨率)6、速度多普勒耦合: 速度较小不考虑,采用锯齿波调频信号时,一般直接将其影响加到系统误差中去。
调频连续波雷达(FMCW)测距测速原理FMCW雷达的工作原理基于多普勒效应和频率测量。
当发射机发送连续变化的频率调制信号时,信号的频率将会随时间线性变化。
这个频率变化的斜率称为调频斜率。
当发射信号经过天线发射出去,在遇到目标后,信号会被目标散射回来,然后被接收天线接收。
当接收天线接收到返回信号时,会将信号和发射信号进行混频处理,将其与发射信号相乘。
这样做的目的是为了提取目标的频率信息。
由于目标的速度不同,返回信号的频率也会有所不同。
根据多普勒效应的原理,当目标向雷达揭示而来时,频率会比发射信号的频率高;相反,当目标远离雷达时,频率会比发射信号的频率低。
接收到的混频信号将通过低通滤波器进行滤波,以去除不想要的频率成分。
然后,信号将被转换成数字信号,通过快速傅里叶变换(Fourier Transform)进行频谱分析。
频谱的峰值表示目标的频率,根据频率的变化可以计算出目标的速度。
根据多普勒频移的公式,测量得到的频移值与目标的速度成正比。
利用目标的速度与雷达到目标的距离之间的关系,可以通过简单的数学运算得到目标的距离。
由于信号频率的线性变化,可以通过测量信号的起始频率和终止频率,以及相应的时间间隔,计算得到距离。
在FMCW雷达系统中,还需要对信号的回波强度进行测量,以评估目标的反射特性。
这可以通过测量接收信号的功率来实现。
通过分析接收到的功率信号,可以确定目标的散射截面积(Cross Section),从而估计目标的大小。
总结起来,FMCW雷达的测距测速原理基于多普勒效应和频率测量。
通过发送频率变化的信号,接收并处理返回信号,测量目标的频率和功率,从而得到目标的距离、速度和反射特性。
这种雷达系统具有高精度、高分辨率和广泛测速范围的优势,广泛应用于交通监测、无人驾驶、气象观测等领域。
连续波雷达测速测距原理连续波雷达(Continuous Wave Radar,CWR)是一种常用的雷达测速测距技术,它利用连续发射和接收电磁波,通过测量波的往返时间和频率差,来精确测定目标物体的速度和距离。
本文将详细介绍连续波雷达的测速测距原理。
一、连续波雷达的原理当返回的波到达雷达时,雷达接收到波和发射的波之间存在一定的相位差。
而这个相位差可以用来计算出物体的距离。
具体的计算公式如下:距离=相位差×光速/(2×发射频率)在这个公式中,相位差是接收到的波和发射的波之间的相位差,光速为常数,发射频率为雷达发射的频率。
但是,单纯的通过距离无法获得目标物体的速度。
所以,连续波雷达需要通过测量频率差来计算目标物体的速度。
当目标物体以一定速度向雷达靠近或远离时,返回的波的频率会有一定的变化。
假设目标物体向雷达靠近,则返回的波的频率会增加。
频率的变化可以用来计算目标物体的速度。
具体的计算公式如下:速度=频率变化量×光速/(2×发射频率)在这个公式中,频率变化量为接收到的波的频率和发射的波的频率之差。
二、连续波雷达的应用在航空领域,连续波雷达常用于测量无人机的速度和距离,以及预警系统中。
通过测量无人机的速度,可以帮助准确控制无人机的行驶速度,并确保安全。
而通过测量无人机的距离,可以及时避免与其他航空器发生碰撞的危险。
在航海领域,连续波雷达常用于船舶的导航和控制系统中。
通过测量船舶与障碍物之间的距离,可以及时警示船舶避免碰撞。
同时,通过测量船舶的速度,可以帮助船舶准确抵达目的地,并且保持适当的速度,提高航行的效率。
在交通运输领域,连续波雷达常用于测速仪器和交通探测器中。
通过测量车辆的速度,可以帮助交通管理部门监测交通流量、控制交通信号,并保证车辆在道路上行驶的安全。
总结起来,连续波雷达利用波的往返时间和频率变化,实现对目标物体的精确测速测距。
在航空、航海、交通运输等领域发挥着重要作用,帮助我们提高交通的安全性和效率。

调频连续波雷达测距原理一、引言调频连续波雷达是一种常用的测距技术,它通过发射一段频率不断变化的信号,并接收回波信号进行处理,实现对目标物体的距离测量。
本文将详细介绍调频连续波雷达的原理及其实现过程。
二、调频连续波雷达原理1. 原理概述调频连续波雷达是利用高频电磁波与目标物体相互作用的原理进行测距。
它通过发射一段连续变化的高频信号,并接收回波信号,通过计算发射信号与回波信号之间的时间差和相位差,从而得到目标物体与雷达之间的距离信息。
2. 发射信号调频连续波雷达采用一段带宽较大、中心频率不断变化的信号作为发射信号。
这种信号被称为“调频连续波”(Frequency Modulated Continuous Wave,简称FMCW)。
3. 回波信号当FMCW信号遇到目标物体时,会被反射回来形成回波。
这个回波包含了目标物体与雷达之间的距离信息。
4. 时域处理接收到回波信号后,调频连续波雷达会对其进行时域处理。
具体来说,它会将发射信号与回波信号进行匹配,并计算它们之间的时间差和相位差。
5. 频域处理在进行时域处理之后,调频连续波雷达还需要进行频域处理。
具体来说,它会将时域信号转换成频域信号,并通过傅里叶变换等算法进行分析和处理。
6. 距离测量通过对发射信号与回波信号的时间差和相位差进行计算,调频连续波雷达可以得到目标物体与雷达之间的距离信息。
具体来说,距离可以通过以下公式计算得出:d = c * (Δt / 2)其中,d表示目标物体与雷达之间的距离;c表示光速;Δt表示发射信号与回波信号之间的时间差。
三、调频连续波雷达实现过程1. 发射器部分调频连续波雷达的发射器部分主要由一个带有可变中心频率的VCO (Voltage Controlled Oscillator)和一个功率放大器组成。
其中,VCO负责产生一段带宽较大、中心频率不断变化的信号,功率放大器则负责将这个信号放大到一定的功率水平。
2. 接收器部分调频连续波雷达的接收器部分主要由一个低噪声放大器、一个混频器、一个带通滤波器和一个ADC(Analog-to-Digital Converter)组成。
1 雷达原理笔记之LFMCW雷达测距测速
1 雷达原理笔记之LFMCW雷达测距测速
1.1 单边扫频锯齿波
1.1.1 静止目标回波分析
1.1.2 运动目标回波分析
1.1.3 优缺点分析
1.2 双边扫频三角波
1.2.1 运动目标回波分析
调频连续波雷达在当今的雷达行业仍占有较高的地位。
由于其无盲区测距的巨大优势,现在人们更多地将其应用在车载雷达行业。
调频连续波雷达现在主要有单边扫频(锯齿波)和双边扫频(三角波)两种调制形式。
1.1 单边扫频锯齿波
上图就是典型的单边扫频连续波雷达的图像,调频斜率。
1.1.1 静止目标回波分析
静止目标(或者径向速度为0)的目标没有多普勒频移,因此回波信号在频率轴没有频移而只是在时间上延后时间。
雷达接收机前端将发射信号和回波信号进行混频得到差拍频率。
有如下关系式:
由此可以解得:
由此便可求出距离目标的距离。
而静止目标(或者径向速度为0)。
与脉冲体制雷达一样,单边扫频锯齿波雷达同样存在蹴鞠模糊问题:
当回波信号的时间延迟大于单边扫频锯齿波雷达的周期时会出现距离测量的模糊现象。
真实目标距离与测量值相差整数个最大不模糊距离()。
1.1.2 运动目标回波分析
由上图可以清楚地看出,目标的多普勒频移、差拍频率以及回波延时,满足如下关系:
进一步整理,得到:
1.2 双边扫频三角波
上图就是典型的单边扫频连续波雷达的图像,调频斜率。
1.2.1 运动目标回波分析
根据上图可以清楚的看出、、、有如下关系:。
连续波雷达几大误区介绍!??注意几个要素连续波雷达通常是通过三个指标跟踪目标,一个是增益方向寻找目标位置,一个是反射信号频差来确定距离,再一个就是多普勒频移测定径向速度。
实际上频移已经反映到频差中了,通常是通过调频周期来测定频移。
其优点是低功率,容易伪装,再就是精度高,无近界死区,等等,缺点是测定的要素多,会比单脉冲复杂和延时长单脉冲其含义就是一个脉冲既能够确定目标运动要素。
通过一个脉冲,反射回来的信号,通过双T头形成和差信号测角,同时回波时间测定目标距离,频移测定径向速度,一个脉冲就全有了。
PD其实是一个滤波检测制式,不一定局限于单脉冲,主要指能够检测PD频移的雷达信号制式。
这些要素在一台雷达上组合起来应用,就很有意思了,可以形成以下几类:单脉冲与无PD检测组合,这是早期的雷达用的多单脉冲与带PD检测组合,这就是常说的PD雷达单脉冲+PD检测+抛物面天线,这就是早期60年代后期的机载PD雷达形态单脉冲+PD检测+卡塞格伦天线,这就是七十年代至八十年代的机载PD雷达形态单脉冲+PD 检测+平板缝隙天线,这就是七十至今的机载PD雷达形态单脉冲+PD检测+相控阵天线,这就是相控阵机载雷达,不过就不再称呼中提及PD,而是突出天线是相控阵,不然名称太长,太拗口注意,从有了机载雷达以来,除了60年代中期PD检测大量运用,此后的机载雷达最大的硬件变化就是围绕天线。
机载雷达诞生80年以来,有近50年是围绕天线革新打转,而PD制式也是近60来一直是最主要、甚至是唯一的机载雷达信号检测制式。
连续波雷达接收机的带宽窄于脉冲雷达接收机,因此它有利于抗杂波,在电磁干扰环境下有更好的下视和抗干扰能力,特别是只需测速时,连续波雷达更为优越,测距时也不存在脉冲雷达的距离遮挡现象。
在应用中有单载频连续被和调制连续波两大类。
单载频连续被雷达只能测速不能测距,广泛用于各种测速系统。
调制连续波有伪码连续波和调频连续被两种,可以测速也可以测距,由于收发隔离度的限制,常见于低功率的雷达应用。
fmcw雷达原理FMCW雷达是一种基于频率调制连续波(Frequency Modulated Continuous Wave)的雷达技术,它利用信号的频率差来测量距离的变化。
FMCW雷达原理如下:1.发射器:FMCW雷达通过发射器发射连续波信号。
这个信号的频率是从一个起始频率到一个终止频率中不断变化的。
通常情况下,起始频率和终止频率之间的差值称为调频带宽,它决定了FMCW雷达的测距分辨率。
2.目标回波:当发射的连续波信号遇到目标物体时,目标物体会将信号反射回来形成回波。
回波的频率会随着目标物体的距离而发生改变。
如果目标物体靠近雷达,回波的频率比发射信号的频率更高,反之亦然。
3.天线和混频器:回波信号通过接收天线接收后,与发射器发出的信号进行混频,形成中频信号。
混频器需要将发射信号和回波信号进行比较,以得到频率差异。
4.频率差计算:通过测量混频器产生的中频信号的频率差异,可以计算出目标物体与雷达之间的距离。
由于回波信号的频率与距离成正比,因此可以通过频率差值来估计出目标的距离。
5.频率转换:中频信号经过滤波器和放大器的处理后,可以得到一个稳定的频率信号。
这个频率信号常常需要转换成可视化的形式,以便人们能够对距离进行直观的理解。
FMCW雷达具有以下优点:1.测量精度高:FMCW雷达通过测量频率差值来计算距离,可以达到亚毫米级的高精度测量。
2.测距分辨率高:FMCW雷达的测距分辨率取决于调频带宽,通常可以达到10厘米量级,甚至更高。
3.不容易受干扰:FMCW雷达是一种调频连续波技术,相比于脉冲雷达,它的抗干扰性更强。
4.多目标分辨能力:由于FMCW雷达是连续波信号,它可以同时检测和跟踪多个目标。
5.对静止目标也有较好的检测能力:由于发射信号和回波信号频率的差值非常小,FMCW雷达对于静止目标也有较好的检测能力。
总结起来,FMCW雷达是一种基于频率调制连续波的雷达技术,利用信号的频率差来测量距离的变化。
干货-线性调频连续波雷达基本原理(第1讲)大家好!我是喜欢把问题研究明白的调皮哥。
本系列总共三期,内容根据TI官方资料改编,本期内容主要讨论如下问题:(1)调频连续波雷达如何估计目标的距离?(2)调频连续波雷达如何探测多目标?(3)调频连续波雷达能够探测多远?(4)调频连续波雷达如何区分两个相邻目标?1. 什么是调频信号(chirp)?众所周知,目前的雷达主要有两种体制,一种是脉冲雷达,另一种是连续波雷达。
连续波雷达有非调制单频、多频,以及调频连续波雷达。
调频连续波雷达主要有频率-时间函数呈三角波、锯齿波,以及正弦波等几种,而目前民用雷达通常采用的是锯齿波。
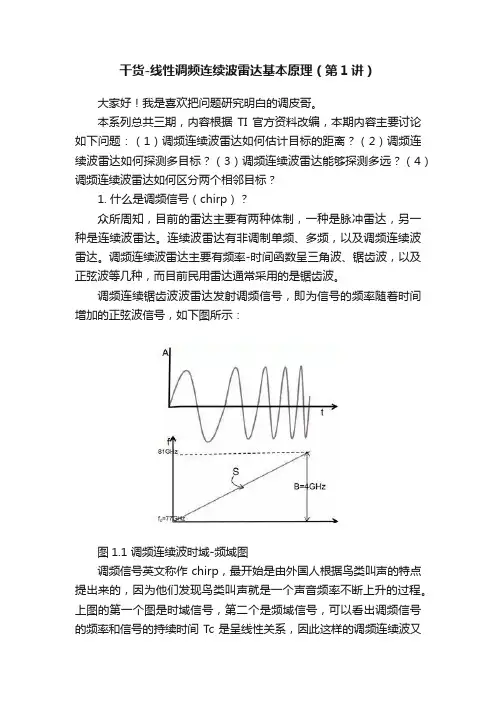
调频连续锯齿波波雷达发射调频信号,即为信号的频率随着时间增加的正弦波信号,如下图所示:图1.1 调频连续波时域-频域图调频信号英文称作chirp,最开始是由外国人根据鸟类叫声的特点提出来的,因为他们发现鸟类叫声就是一个声音频率不断上升的过程。
上图的第一个图是时域信号,第二个是频域信号,可以看出调频信号的频率和信号的持续时间T c是呈线性关系,因此这样的调频连续波又称为线性调频连续波(LFMCW)。
LFMCW有几个主要的参数需要注意,分别是发射最大带宽B,调频斜率S,发射脉冲周期T c,发射信号起始频率fc。
这几个参数将在后面会有重要的作用,谨记。
上面的信号中斜率 :2. 单发单收线性调频连续波雷达顾名思义,单发单收雷达就是只有一个发射天线和一个接受天线,如下图所示。
图2.1 单发单收雷达如上图所示,频率综合器(Synth)生成调频信号,由发射天线(Tx ant)发射出去,电磁波打到物体上反射回来的信号叫做回波信号,回波信号被接收天线(Rx ant)接收,然后与发射信号进行混频(mixer),得到中频信号(IF signal)。
那么什么叫做混频呢?本科在高频电子线路中学习过,混频就是一个乘法器,将两个信号进行相乘,然后得到他们之间的信号频率差以及频率和。
FMCW可调连续波雷达原理FMCW(Frequency Modulated Continuous Wave)可调连续波雷达是一种常用的雷达工作原理。
它使用连续波信号,通过频率调制来获得目标信息。
下面将详细介绍FMCW可调连续波雷达的原理。
FMCW可调连续波雷达的原理基于多普勒效应和光孤子的概念。
多普勒效应是指当物体相对于雷达系统运动时,由于接收到的信号频率发生了变化。
光孤子是一种光波的自相似传播现象,可以通过控制光波的包络来实现频率调制。
因此,FMCW可调连续波雷达通过产生频率可调谐的光波,并通过探测回波信号的频率变化来获得目标的速度和距离。
1.首先,产生一个连续波光源,并通过调制器对光波进行频率调制。
调制器通常使用光子晶体纤维,可通过调节光纤长度来改变频率。
调制后的信号称为扫频信号,具有一定的频率变化范围和扫频时间。
2.探测器接收到扫频信号,并通过混频器和本地振荡器进行信号混频。
混频过程中,如果探测到目标返回的回波信号,其频率将发生变化。
3.当探测到回波信号时,通过改变本地振荡器的频率来与回波信号混频。
混频结果将产生一个差值频率信号,该信号的频率和目标的速度成正比。
这样就可以通过测量差值频率来确定目标的速度。
4.同时,通过分析探测到的频率变化,可以确定目标与雷达之间的距离。
当一个物体靠近雷达时,回波信号的频率将变高,而当物体远离雷达时,回波信号的频率将变低。
通过测量回波信号的频率变化,就可以推断出目标的距离。
1.频率可调谐:通过改变光波频率,可以实现对不同距离目标的检测和测量。
2.高分辨率:由于FMCW雷达通过测量频率变化来确定目标的速度和距离,因此它具有较高的分辨率。
3.连续工作:FMCW雷达可以持续发送连续波信号,同时接收回波信号。
这使得它在实时检测和跟踪目标时具有优势。
4.抗干扰能力强:由于FMCW雷达使用的是连续波信号,相对于脉冲雷达来说,它对于一些干扰信号更具有抗干扰能力。
总结起来,FMCW可调连续波雷达是一种基于多普勒效应和光孤子原理的雷达工作原理。
fmcw激光雷达测距原理FMCW激光雷达测距原理引言:激光雷达是一种利用激光技术进行远距离测量的设备,常用于自动驾驶、机器人导航以及工业测量等领域。
其中,频率调制连续波(Frequency Modulated Continuous Wave,简称FMCW)激光雷达是一种常见的激光雷达测距原理。
本文将介绍FMCW激光雷达的工作原理及其测距原理。
一、FMCW激光雷达的工作原理FMCW激光雷达是基于连续波技术的一种雷达系统。
它通过调制激光的频率,在发射端产生一种连续变化的频率扫描信号。
这个频率扫描信号在一定的时间内持续进行,然后通过接收端接收回波信号。
接收端将回波信号与发射信号进行比较,从而得出目标物体的距离信息。
二、FMCW激光雷达的测距原理FMCW激光雷达的测距原理基于多普勒效应和时间差测量。
当激光束照射到目标物体上时,部分激光会被目标物体反射回来。
接收端接收到的回波信号经过光电二极管转换为电信号,然后通过信号处理电路进行处理。
1. 多普勒效应当目标物体静止时,回波信号的频率与发射信号的频率相同。
但当目标物体相对于激光雷达运动时,回波信号的频率将发生变化。
这种频率变化称为多普勒频移,通过测量多普勒频移可以得知目标物体的速度。
2. 时间差测量FMCW激光雷达的发射信号是一个频率连续变化的信号。
当回波信号到达接收端时,接收端的信号处理电路会记录下回波信号到达的时间。
通过测量发射信号和回波信号之间的时间差,可以计算出目标物体与激光雷达的距离。
综合利用多普勒效应和时间差测量,FMCW激光雷达可以实现对目标物体的距离和速度的测量。
同时,由于FMCW激光雷达的工作原理是基于连续波技术,因此它的测距精度较高,可以达到亚毫米级别。
三、FMCW激光雷达的应用FMCW激光雷达广泛应用于自动驾驶、机器人导航以及工业测量等领域。
在自动驾驶领域,FMCW激光雷达可以用于实时感知周围环境,实现障碍物检测和距离测量,为自动驾驶系统提供重要的环境信息。
fmcw雷达测角原理-回复FMCW雷达测角原理引言:在现代科技的快速发展中,雷达技术的应用越来越广泛。
其中,FMCW(调频连续波)雷达是一种常见的雷达系统,广泛应用于目标测量、航空导航、地震监测等领域。
本文将详细介绍FMCW雷达测角原理,从基本概念到具体实现过程,一步一步解析其工作原理及应用。
第一部分:FMCW雷达基本概念在深入研究FMCW雷达测角原理之前,我们先来了解一些基本概念。
1. 调频连续波(FMCW):FMCW雷达是一种通过改变发射信号的频率来实现距离和速度测量的雷达系统。
它采用连续波信号以持续发送,而不是脉冲,从而使得测量更加精确。
2. 时延-Doppler效应:FMCW雷达测量目标距离和速度的基本原理是利用时延-Doppler效应。
该效应描述了由于目标运动引起的信号频率的变化。
当目标靠近雷达时,接收到的信号频率会增加;当目标远离时,接收到的信号频率会减小。
第二部分:FMCW雷达测角原理了解了基本概念后,我们将深入探讨FMCW雷达测角原理的具体过程。
1. 发送信号:FMCW雷达首先发送一个连续变频信号。
这个信号的频率会从一个初始值线性地变化到一个目标值,然后又重新回到初始值。
这个变化的频率被称为频率搏动。
2. 目标回波:发送的信号会遇到一个目标,目标会反射部分信号,并形成回波。
这个回波信号会同时包含距离和速度的信息。
3. 混频:回波信号与发送信号混频。
这样做的目的是提取出回波信号中的频率信息,以便后续的处理。
4. 距离测量:在混频后,可以通过测量信号的时延来计算出目标与雷达的距离。
时延是目标回波信号与发送信号之间的时间差。
通过测量时延,可以得到目标与雷达之间的距离。
5. 频率测量:通过频率测量,可以得到目标相对于雷达的速度。
这个频率是由于目标运动引起的回波信号的频率变化。
6. 角度测量:通过测量不同接收天线上的回波信号的相位差异,可以推导出目标相对于雷达的方位角。
这个相位差可以通过信号处理算法来计算。
雷达信号处理原理:电磁波在系统中的分析雷达(Radar)是一种利用电磁波进行目标探测、跟踪和测距的技术。
雷达信号处理是指对从雷达接收到的电磁波信号进行分析、提取目标信息、消除干扰和噪声等一系列处理过程。
以下是雷达信号处理的基本原理:脉冲雷达和连续波雷达:雷达系统可以分为脉冲雷达和连续波雷达。
脉冲雷达发射脉冲信号,通过测量脉冲的往返时间来确定目标的距离。
连续波雷达则使用连续波信号,通过测量频率变化来确定目标的速度。
目标的测距:雷达发射脉冲或连续波信号,当这些信号碰到目标时,一部分被目标反射回来。
通过测量信号的往返时间,可以计算目标的距离。
目标的速度:对于脉冲雷达,通过测量脉冲的多普勒频移(Doppler Shift),可以确定目标的速度。
对于连续波雷达,通过测量信号频率的变化同样可以得到目标的速度。
脉冲压缩:为了提高测距分辨率,脉冲雷达系统通常采用脉冲压缩技术。
这涉及到利用特殊的信号处理算法,使得接收到的脉冲信号在时间上变短,从而提高对不同目标的分辨率。
信号处理和滤波:接收到的雷达信号会包含各种干扰和噪声,因此需要进行信号处理和滤波。
常见的处理方法包括滤波、脉冲压缩、自适应滤波等。
虚警管理:为了防止系统对于无关目标的误报,雷达系统通常配备有虚警管理模块。
这包括对信号的特征进行分析,以确定是否为真实目标。
目标识别和跟踪:通过对处理后的信号进行目标识别,可以确定目标的性质和身份。
目标跟踪则涉及连续监测和更新目标的状态信息,以提供目标的运动轨迹。
总体而言,雷达信号处理涉及到对多种信号处理技术的应用,以确保雷达系统能够准确、高效地探测和跟踪目标。
这些技术不仅在军事领域有广泛应用,也在民用领域如气象、航空、交通控制等方面发挥着重要作用。
连续波和长脉冲连续波和长脉冲是在雷达信号处理中常用的两种信号形式。
它们都可以用于雷达探测和成像,但是在不同的应用场合下有着不同的优缺点。
一、连续波连续波(Continuous Wave,简称CW)是指频率不变、振幅恒定的一种周期性信号。
在雷达中,连续波通常由一个高频振荡器产生,并通过功率放大器放大后发射出去。
由于其频率稳定、带宽窄等特点,CW信号可以提供很高的测量精度和探测距离。
1.1 连续波的特点(1)频率稳定:CW信号的频率非常稳定,因为它是由一个振荡器产生的。
这使得CW信号可以提供很高的测量精度和探测距离。
(2)带宽窄:CW信号只有一个频率分量,因此其带宽非常窄。
这使得CW雷达可以具有很高的分辨能力。
(3)功率持续:由于CW信号是连续发射的,因此其功率也是持续不断地输出。
这使得CW雷达可以具有很高的探测灵敏度。
1.2 连续波的应用(1)测距:由于CW信号的频率稳定性和带宽窄,可以通过测量回波信号的相位差来确定目标距离。
(2)速度测量:通过测量回波信号的多普勒频移来确定目标速度。
(3)成像:CW雷达可以通过合成孔径雷达(SAR)技术进行成像,从而获得高分辨率的图像。
二、长脉冲长脉冲(Long Pulse,简称LP)是指脉冲宽度较宽、重复周期较长的一种周期性信号。
在雷达中,长脉冲通常由一个脉冲发生器产生,并通过功率放大器放大后发射出去。
由于其能够提供很高的峰值功率和较强的抗干扰能力,因此在某些应用场合下比连续波更为适用。
2.1 长脉冲的特点(1)峰值功率高:由于长脉冲具有很宽的脉冲宽度,因此其峰值功率也非常高。
这使得长脉冲雷达可以具有很远的探测距离。
(2)抗干扰能力强:由于长脉冲具有很宽的带宽,因此其抗干扰能力也比较强。
这使得长脉冲雷达可以在复杂的电磁环境中工作。
(3)分辨率低:由于长脉冲具有很宽的脉冲宽度,因此其分辨率也比较低。
这使得长脉冲雷达不能提供很高的目标分辨率。
2.2 长脉冲的应用(1)探测距离远:由于长脉冲具有很高的峰值功率,因此可以提供更远的探测距离。
连续波雷达介绍
连续波雷达是发射持续的等幅波信号,用以探测活动目标的雷达。
按信号形式,可分为非调制单频连续波雷达、调频连续波雷达、相位编码连续波雷达和多频连续波雷达等。
非调制单频连续波雷达它发射未经任何调制的载频为单一频率(f0)的纯连续波信号。
当电磁波遇到运动目标时,其回波信号的频率将产生多普勒频移,多普勒频移量与目标的径向速度成正比。
接收天线收到的回波信号与发射信号混频后,其差频信号即为目标的多普勒频率信号,以此即可计算出目标的速度,并显示在荧光屏上。
非调制单频连续波雷达能对具有任何速度的目标测速,并且不产生速度模糊,但不能测量目标的距离。
调频连续波雷达它的工作频率按一定规律作周期性变化。
常用的线性调频连续波雷达的工作频率随时间作周期性的线性变化。
目标回波信号与发射信号混频而产生频差信号,测量频率差值的大小确定目标的距离,并根据回波的多普勒频率测定其速度。
相位编码连续波雷达它的发射信号由周期性变化的编码子脉冲序列进行相位调制,根据目标回波信号与发射信号的相位变化的起始时间之差进行测。