联合相关图像识别
- 格式:pdf
- 大小:1.28 MB
- 文档页数:11


机器学习技术的图像识别算法图像识别算法是机器学习技术中的重要应用之一。
随着计算机技术的不断发展,图像识别算法在人工智能、自动驾驶、医疗诊断等领域得到了广泛的应用。
本文将从机器学习技术的角度,探讨图像识别算法的原理、应用和发展前景。
一、图像识别算法的原理图像识别算法的核心是利用机器学习技术对图像进行特征提取和分类。
具体而言,图像识别算法可以分为以下几个步骤:1. 数据收集和预处理:首先获取大量的图像数据,并进行预处理,如去噪、尺寸调整等。
这一步骤的目的是为了提供高质量的训练数据集。
2. 特征提取:通过特定的图像处理技术,从图像中提取出有意义的特征。
常用的特征提取方法包括SIFT、HOG等。
特征提取的目的是将图像转化为可用于机器学习算法的数值特征。
3. 特征选择和降维:对提取的特征进行选择和降维,以减少特征的维度和冗余信息。
常用的特征选择和降维方法有主成分分析(PCA)等。
4. 分类器的训练和分类:利用机器学习算法,对提取的特征进行分类。
常见的分类器包括支持向量机(SVM)、卷积神经网络(CNN)等。
二、图像识别算法的应用图像识别算法在许多领域都有广泛的应用。
以下列举几个典型的应用案例:1. 人脸识别:人脸识别算法可以用于人脸识别门禁系统、人脸支付等场景。
通过机器学习算法训练,可以实现高精度的人脸识别。
2. 物体检测:物体检测算法可用于自动驾驶、监控安防等领域。
通过识别和追踪物体,可以实现智能化的交通管理和安全监控。
3. 医疗诊断:图像识别算法在医疗诊断中发挥重要作用。
例如,利用机器学习算法可以对医学影像数据进行分析和识别,辅助医生进行准确的疾病诊断。
4. 图像搜索:图像搜索算法可以实现基于图像的搜索,即通过输入一张图像找到与之相似的图像。
这在电商平台中具有较好的应用前景。
三、图像识别算法的发展前景随着机器学习和深度学习技术的不断发展,图像识别算法的性能和应用前景也在逐步提升。
未来图像识别算法的发展趋势有以下几个方向:1. 深度学习技术的应用:深度学习是当前图像识别算法的主流技术,未来还会继续发展。

实验五 联合傅里叶变换相关图像识别光学图像和特征的分析与识别是近代光学信息处理的一个重要研究领域。
人们一直在研究能够自动识别图像和特征的机器或系统,在工业上用于自动识别卫星遥感图像中的特征地形地貌,识别文件和信用卡上的签字,将现场指纹和大量档案指纹进行比对,从生物切片的显微图像中识别病变细胞,在军事上则用于识别空中和地面目标等等。
光学图像特征识别系统的基本结构是光学相关器,具有高度并行、大容量、快速处理等特点,在一些领域中已取得接近实用的成果。
联合傅里叶变换(Joint-Fourier transform)是重要的相关处理,在指纹识别、 字符识别、目标识别等领域已逐步进入实用化阶段。
本实验使用空间光调制器实现了实时光电混合处理,是典型的近代光学信息处理实验。
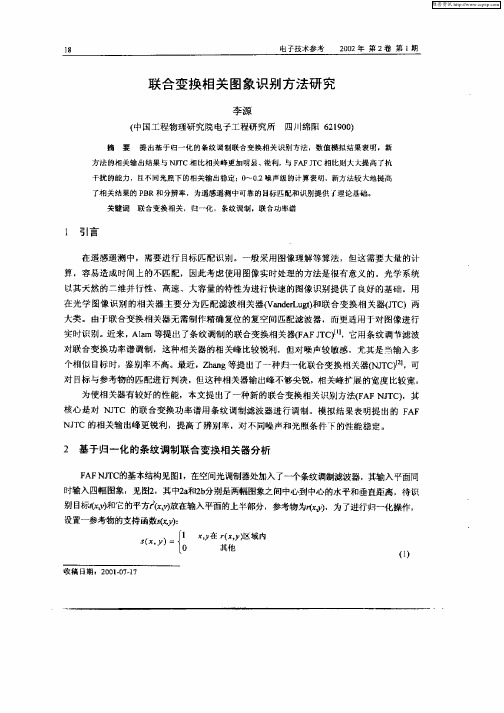
一、实验原理1. 联合傅里叶变换功率谱的记录联合傅里叶变换相关器(joint-Fourier transform correlator , JTC )简称联合变换相关器,分成两步,第一步是用平方记录介质(或器件)记录联合变换的功率谱,如图1所示。
[]()(,)(,)(,)exp exp (,)exp (,),()2S u v f x a y g x a y i xu yv dxdy f 22i au F u v i au G u v 1f f πλππλλ∞∞-∞-∞⎡⎤=++--+⎢⎥⎣⎦⎡⎤⎡⎤=+-⎢⎥⎢⎥⎣⎦⎣⎦⎰⎰图中L 是傅里叶变换透镜,焦距为f ,待识别图像(例如待识别目标、现场指纹)的透过率为f (x ,y ),置于输入平面(透镜前焦面)xy 的一侧,其中心位于(-a , 0);参考图像(例如参考目标、档案指纹)的透过率为g (x , y ),置于输入平面的另一侧,其中心位于(a , 0)。
用准直的激光束照射f ,g ,并通过透镜进行傅里叶变换。
在谱面(透镜的后焦面)uv 上的复振幅分布如果用平方律记录介质或用平方律探测器来记录谱面上的图形,得到:(,)(,)exp (,)*(,)exp *(,)(,)(,),()2222S u v F u v i au F u v G u v f 2i au F u v G u v G u v 2f πλπλ⎡⎤=+⋅⎢⎥⎣⎦⎡⎤+-⋅+⎢⎥⎣⎦图1 联合傅里叶变换功率谱的记录即联合变换的功率谱。

基于多模态融合的图像识别算法研究随着人工智能技术的不断发展,图像识别算法被越来越广泛地应用于人们生活和工作中。
而基于多模态融合的图像识别算法,由于在多个角度提取图像信息,可以提高识别的准确率和鲁棒性,得到了越来越多的关注和研究。
一、多模态融合的概念所谓多模态融合,是指将来自不同传感器或源的信息进行整合,从而获得更丰富、更准确、更完整的信息。
在图像识别领域,多模态融合意味着将来自不同图像特征的信息融合在一起,以提高识别的准确性和效率。
二、基于多模态融合的图像识别算法基于多模态融合的图像识别算法,主要有以下三种类型:1.基于特征融合的算法特征融合是指将来自不同特征提取方法得到的特征进行融合,以提高识别的准确率。
具体方法包括加权平均、特征拼接、特征堆叠等。
其中,加权平均是最常用的方法,可以根据各特征在识别中的作用进行加权,从而得到更为准确的结果。
值得注意的是,特征融合的过程也会提高算法的复杂度,因此在实际应用中也需要对算法进行优化以提高效率。
2.基于决策融合的算法决策融合是指将多种分类器的结果进行整合,以得到更准确的分类结果。
在图像识别中,不同的分类器可以提取不同的特征,得出不同的结果。
这些结果可以通过加权求和、最大化投票等方式进行整合,得到更为准确的结果。
但是,在决策融合中,需要对各分类器的可靠性进行评估,并进行权重调整,以避免其对最终结果的影响。
3.基于任务融合的算法任务融合是指将多个任务的识别结果进行整合,以得到更为准确的结果。
在图像识别中,不同的任务可以包括目标物体的识别、物体的姿态估计和目标物体的识别等。
这些任务可以根据其在识别任务中的重要性进行加权求和或投票融合,以得到更为准确和完整的识别结果。
三、多模态融合的优势相较于单一模态的图像识别算法,基于多模态融合的算法具有以下优势:1.提高了识别准确率由于多种模态提取的特征相对较为独立,因此,通过多模态融合可以提高识别的准确性。
例如,在人脸识别领域中,可以将三维人脸模型和二维人脸图像进行融合,得到更为准确的人脸识别结果。
最新联合傅里叶变换相关图像识别实验报告书nXXX。
there have been many ns and XXX transform。
A new type of dual-channel joint transform correlator has been developed。
which calculates the optimal parameters and beam n parameters of the Fourier lens。
XXX joint correlators。
wavelet transform。
image n。
nal Fourier transform。
and logarithmic transform have been used。
The XXX。
which enhances high-frequency components and sharpens n peaks by taking the log n of the joint power spectrum。
This method has a simple algorithm。
low XXX。
and is suitable for real-time processing。
However。
it also strengthens noise while enhancing the high-frequency components of the power spectrum。
which affects XXX correlator。
which improves XXX the form of the log n。
The anti-XXX.Research TopicMost of the research on the above topics is limited to image processing of the original object image or power spectrum。
物理光学小组作业课题:联合相关图像识别班级:光电1403 成员:陶柏全,彭尹,黄锡销,杨航,侯禹光学相关模式识别(Optical Correlation Pattern Recognition)是应用光学变换相关的方法,从混乱的图像信息中找出所需要的目标图像,来达到识别目标图像信息的目的。
光学相关模式识别运用了光学的相关运算器;光学相关运算器可以大致分为两种:匹配滤波相关器(Matched Filtering Correlator MFC)和联合变换相关器(Joint Transform Correlatror JTC);通过下面几个问题的讨论,加深对信息光学及光信息处理的了解。
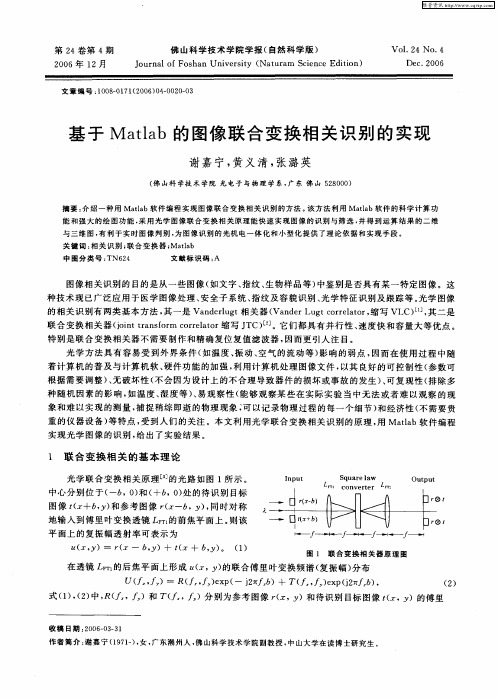
(1)知识:描述实现光信息处理的4F系统,意义及实现方法;上图为4f系统的光路图。
经过L1扩束后变为平行光,然后经过y1,透过率函数为f1(x1,y1),在L2的后焦面上可以观察到y1的频谱F1[x2/(λf),y2/(λf)],y2平面上也有透过率函数f2,所对应的傅里叶变换为F2[x2/(λf),y2/(λf)],所以透过y2后的角谱为(F1×F2),再经过L3进行一次傅里叶变换,在L3的后焦面光场分布为f1*f2。
当物在透镜前面时,在后焦面的光场为EE ff(xx,yy)=AAee jjjj(ff+dd)jj jj jj ee jjjj2ff�1−dd ff�(xx2+yy2)FF{tt(xx1,yy1)}当将物放在前焦面时,d=f,二次相位消失。
EE ff=AAee jj2jjff jj jj jj FF{tt(xx1,yy1)}若y2的透过率函数为1,就相当于在真空中传播,成像分析如下。
在y2的光场分布为EE ff=AAee jj2jjff jj jj jj FF{tt(xx1,yy1)}然后经过L3进行又一次傅里叶变换EE ff(xx3,yy3)=AAee jj2jjff jj jj jj FF�EE ff(xx2,yy2)�=AAee jj2jjff jj jj jj FF{AAee jj2jjff jj jj jj FF[tt(xx1,yy1)]}=Kt(xx3,yy3)其中,K=(AAee jj2kkkk jjjjff)2,对于光强的分布没有影响。
可以看出,4F系统可以用来对光学信息进行处理。
在y2面上可以加各种滤波器或者其他的光学器件,通过对频域的处理达到对光学信息的处理。
(2)分析与综合:给定一个4F系统,光路如下:在物面上距离中心b处分别放置着参考物r(x-b,y)和待识别物t(x+b,y);波长为λ的单色平行光波照射输入面,运用光学傅里叶变换理论,建立物理模型,分析该系统的下述情况:写出输入平面上的透过率函数;f(x1,y1)=r(x1−b,y1)+t(x1+b,y1)给出LL FFFF1焦平面上的光强分布表达式,即衍射屏的功率谱;将LL FFFF1焦平面上的光强分布用胶片曝光做成衍射屏(square law converter),写出该函数表达式;由上面关于4F系统的描述可知,焦平面上的光场分布为:EE ff(xx2,yy2)=AAee jj2jjff jj jj jj FF{jj(xx1,yy1)}=AAee jj2jjff jj jj jj FF{rr(xx1−bb,yy1)+tt(xx1+bb,yy1)}=AAee jj2kkjj jj jj jj{RR�uu1,vv1�ee−jj2ππbbuu+TT�uu1,vv1�ee jj2ππbbuu}其中,u1=xx2ffjj,v1=yy2ffjj。
光强分布为:II ff(xx2,yy2)=KK{FF[rr(xx1−bb,yy1)+tt(xx1+bb,yy1)]} 2=|R|2+|TT|2+RRTT∗ee−jj4ππππππ+RR∗TTee jj4ππππππ其中,K=(1/λf)2。
将该胶片衍射屏置于LL FFFF2的前焦面上,给出单色光照明下LL FFFF2的后焦面上光强分布,并说明该输出平面上光强分布的意义,即联合相关输出;在此,不再是光场的传播,而是直接用第一次傅里叶变换以后的光强分布来进行傅里叶变换。
EE ff(xx3,yy3)=AAee jj2jjff jj jj jj FF{II ff(xx2,yy2)}II ff(xx3,yy3)=KK×{FF[II ff(xx2,yy2)]} 2=tt(xx3,yy3)⊗tt(xx3,yy3)+rr(xx3,yy3)⨂rr(xx3,yy3)+rr(xx3,yy3)⊗tt(xx3,yy3)∗δδ(xx3+2bb,yy3)+tt(xx3,yy3)⊗rr(xx3,yy3)∗δδ(xx3−2bb,yy3)由公式可见,第一项为t的自相关,第二项为r的自相关,第三项为中心在(-2b,0)点处的t与r的互相关,第四项为中心在(2b,0)点处的t与r1的互相关。
当t=r时,t与r的互相关也就是相同透过率函数的自相关,会出现一个较大的值,也就是在(-2b,0)和(2b,0)亮点会出现2个亮点,而当t与r不同时,t与r的互相关的值会比较小,在(-2b,0)和(2b,0)处不会出现亮点。
实验用“BB”图样和“BO”图样来验证联合相关输出。
实验结果如下图所示,可以看出,当图样为“BB”时,会出现2个相关峰,中心为2个函数的自相关叠加。
当图样为“BO”时,只有中心是亮斑,说明互相关很小。
BB第一次采集BO第一次采集BB第二次采集BO第二次采集(3)仿真分析:原始图片如上第一次傅里叶变换后结果如下:BB BO第二次傅里叶变换如下:BB BO(4)拓展:理解并讨论数字图像处理。
数字图像处理技术通过将图像的信息数据化,规范化整理,通过一系列运算,达到对得到信息的滤除,强化,替代等多种期望中的结果。
从处理方法上来讲,主要分为两大类:空间域处理和频域处理。
空间域处理一般是直接对数字图像进行数组矩阵的运算,以集合的形式来看待需处理的像素,通常使用的方法有:平滑,反色,线性灰度变换,对比增强,或算子的方式例如Sobel 算子,Canny算子,小波变换等。
频域的处理,一般是把图像从空域变换到频域,再从另外一个角度来分析图像的特征并进行处理,处理完毕后再逆映射到空间域。
这些相关运算主要用来实现以下功能:图像去噪,亮度变换,自由几何变换,图像编码,图像分割,数据修复,对象识别等。
频域处理一般是将图像变换到频域,对频谱进行处理,比如通过滤波器等。
用MATLAB对图片进行空域处理:原图片二值化线性增强频域处理:加入噪声低通滤波高通滤波成员贡献:陶柏全:负责报告撰写和理论分析。
彭尹:负责MATLAB仿真和报告撰写。
杨航:负责报告撰写以及查找资料。
黄锡销:负责实验和报告撰写。
侯禹:查找资料。
心得体会:陶柏全:在这次的大作业中,我主要负责报告的撰写。
通过这次实验和理论分析,我清楚并深入的了解到了空间频谱的意义和联合相关的意义。
透镜的焦平面上可以观察空间角谱,也可以在前焦面输入光强信息,来得到联合相关图样。
总之,通过这次大作业,我收获匪浅彭尹:这次大作业中,我主要负责MATLAB仿真分析,通过这次实验,我清楚地认识了数字图像处理的强大,感到学无止境,同时也感受到傅里叶等前人的厉害,以后必须好好学习理论知识并运用到实际应用中。
杨航:其实本学期开始我们对物理光学还是了解甚少的,对光学实验要做什么以及怎么做了解很少。
记得上第一堂实验课时,老师告诉我们光学实验其实很简单,但这是在做好预习的前提之下,所以每堂实验课之前都必须写好预习报告,包括实验的目的、器材、原理等,实验步骤也可以自己提前设计好,但在正式的试验报告中要对步骤加以完善。
这种要求一开始确实不大适应,因为大一大二也做过不少实验了,很少实验有过这样的要求,但在以后的实验过程中我们却发现这样做对我们更好地了解实验做好实验是有很大帮助的。
不光如此,我们的实验教材也与以前有很大的不同,本次教材的实验原理和有关的实验仪器是分开介绍的,这就更加要求我们必须提高自己的能力与水平才能做好每次实验的预习工作,否则到真正实验时就会无从下手,所以从我个人的角度来看这对我们能力的提升是有极大帮助的,而我们本人也从中受益匪浅。
黄锡销:这次大作业过后我们对于相关图像识别及傅里叶分析方面有了更深刻的理解,通过实验的数据检验及小组的仿真建模我们在分析研究傅里叶变换及成像的过程中通过实际验证与理论的严谨推导再一次论证了相关结论。
虽然实验过程中有些许考虑欠佳的部分,但在老师及同学的帮助下我们组顺利地得到了满意的实验结果,组员们也获得了不同程度的收获,因此此次大作业给我们的综合学习能力一个极大的提升。
侯禹:经过这次的大作业,我个人得到了不少的收获,一方面加深了我对课本理论的认识,另一方面也提高了实验操作能力。
现在我总结了以下的体会和经验。
这次的实验跟我们以前做的实验不同,因为我觉得这次我是真真正正的自己亲自去完成。
所以是我觉得这次实验最宝贵,最深刻的。
就是实验的过程全是我们学生自己动手来完成的,这样,我们就必须要弄懂实验的原理。
在这里我深深体会到哲学上理论对实践的指导作用:弄懂实验原理,而且体会到了实验的操作能力是靠自己亲自动手,亲自开动脑筋,亲自去请教别人才能得到提高的。
附件:object1=imread('D:\Documents\MATLAB\BB.jpg');object2=imread('D:\Documents\MATLAB\BO.jpg');fgray1=rgb2gray(object1);fgray2=rgb2gray(object2);figure(1);imshow(fgray1);figure(2);imshow(fgray2);%figure;g=fft2(fgray1);g=fftshift(g);g1=log(abs(g));g1=g1.*g1;g1=(g1-min(min(g1)))/(max(max(g1))-min(min(g1)))*255;g1(g1<90)=0;g1(g1>110)=255;figure(3);imshow(g1);gg=fft2(fgray2);gg=fftshift(gg);gg1=log(abs(gg));gg1=gg1.*gg1;gg1=(gg1-min(min(gg1)))/(max(max(gg1))-min(min(gg1)))*255; gg1(gg1<90)=0;gg1(gg1>110)=255;figure(4);imshow(gg1);g2=fft2(g1);g2=fftshift(g2);g2=log(abs(g2));g2=g2.*g2;g2=(g2-min(min(g2)))/(max(max(g2))-min(min(g2)))*255;g2(g2<130)=0;g2(g2>150)=255;figure(5);imshow(g2);gg2=fft2(gg1);gg2=fftshift(gg2);gg2=log(abs(gg2));gg2=gg2.*gg2;gg2=(gg2-min(min(gg2)))/(max(max(gg2))-min(min(gg2)))*255; gg2(gg2<130)=0;gg2(gg2>150)=255;figure(6);imshow(gg2);图像处理代码:object1=imread('D:\Documents\MATLAB\girl.bmp');figure(1);imshow(object1);figure(2);oo1=object1.*4;imshow(oo1);object1=rgb2gray(object1);J1=imnoise(object1,'salt & pepper',0.05);figure(3);imshow(J1);object1=double(J1);g=fft2(object1);g=fftshift(g);[M,N]=size(g);nn=2; % 二阶巴特沃斯(Butterworth)低通滤波器d0=50;m=fix(M/2);n=fix(N/2);for i=1:Mfor j=1:Nd=sqrt((i-m)^2+(j-n)^2);h1=1/(1+0.414*(d/d0)^(2*nn));result1(i,j)=h1*g(i,j);endendresult1=ifftshift(result1);J2=ifft2(result1);J3=uint8(real(J2)); J3=J3.*3;figure(4);imshow(J3);[M,N]=size(g);nn=2; % 二阶巴特沃斯(Butterworth)低通滤波器d0=50;m=fix(M/2);n=fix(N/2);for i=1:Mfor j=1:Nd=sqrt((i-m)^2+(j-n)^2);if (d==0)h2=0;elseh2=1/(1+0.414*(d0/d)^(2*nn)); endresult2(i,j)=h2*g(i,j);endendresult2=ifftshift(result2);J4=ifft2(result2);J5=uint8(real(J4));figure(5);imshow(J5);。