GPS控制测量各种规范限差
- 格式:doc
- 大小:282.50 KB
- 文档页数:11
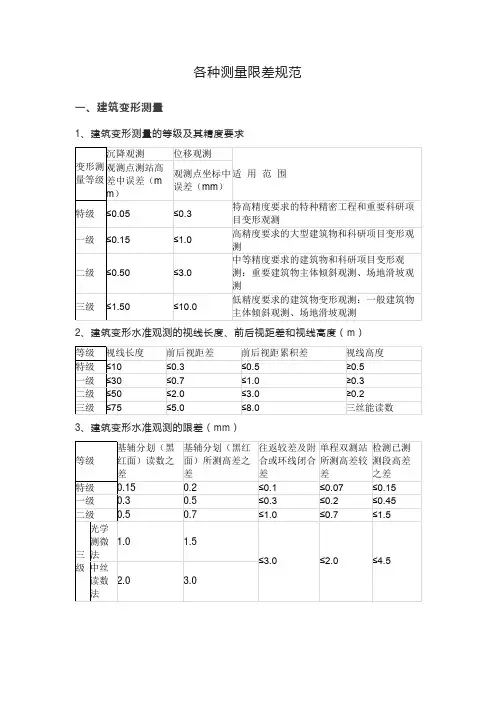
各种测量限差规范————————————————————————————————作者: ————————————————————————————————日期:ﻩ一、建筑变形测量1建筑变形测量的等级及其精度要求变形测量等级沉降观测位移观测适用范围观测点测站高差中误差(mm)观测点坐标中误差(mm)特级≤0.05≤0.3 特高精度要求的特种精密工程和重要科研项目变形观测一级≤0.15≤1.0 高精度要求的大型建筑物和科研项目变形观测二级≤0.50 ≤3.0 中等精度要求的建筑物和科研项目变形观测:重要建筑物主体倾斜观测、场地滑坡观测三级≤1.50≤10.0低精度要求的建筑物变形观测:一般建筑物主体倾斜观测、场地滑坡观测2 建筑变形水准观测的视线长度、前后视距差和视线高度(m)等级视线长度前后视距差前后视距累积差视线高度特级≤10≤0.3 ≤0.5 ≥0.5一级≤30≤0.7 ≤1.0≥0.3二级≤50 ≤2.0≤3.0≥0.2三级≤75≤5.0≤8.0 三丝能读数3建筑变形水准观测的限差(mm)等级基辅分划(黑红面)读数之差基辅分划(黑红面)所测高差之差往返较差及附合或环线闭合差单程双测站所测高差较差检测已测测段高差之差特级0.15 0.2 ≤0.1≤0.07≤0.15一级0.30.5 ≤0.3≤0.2≤0.45 二级0.5 0.7≤1.0≤0.7≤1.5三级光学测微法1.0 1.5≤3.0 ≤2.0 ≤4.5中丝读数法2.03.0I角对于特级水准观测的仪器不得大于10″,对于一二级水准观测仪器不得大于15″,铟瓦水准尺、尺垫。
二、城市测量规范1平面控制光电测距导线的主要技术指标等级城测导线城测平均边长工测导线工测平均边长测角中误差"测距中误城测导线相对闭合工测导线相对闭合测回数方位角闭J1 J2 DJ6长度(km)(km)长度(km)(km) 差mm 差差合差(")四等10.0 1.69.0 1.5≤±2.5 ±≤18≤1/40000≤1/350004 6 ±5一级3.6 0.30 4.0 0.5 ≤±5±≤15≤1/14000≤1/150002 4 ±10二级2.40.20 2.4 0.25≤±8±≤15≤1/10000≤1/100001 3 ±16三级1.5 0.121.2 0.1≤±12±≤15≤1/6000≤1/5000 1 2 ±24 n测站数边长测距观测要求及限差等级测距仪测回数往返总测回数一测回读数较差mm单程测回间数较差 mm备注四等ⅠⅡ1 1 24Ⅰ 5Ⅱ 10Ⅰ7Ⅱ15一测回是指照准目标一次4次读数一级Ⅱ 1 2 Ⅱ 10 Ⅱ15二、三级Ⅱ 1 1 Ⅱ 10 Ⅱ15测量方向观测法的各项限差(")仪器半测回归零差一测回归内2c较差差同一方向值各测回较差DJ1 6 9 6DJ2 8 13 9DJ6 18-- 242高程控制水准测量主要技术要求(mm)1千米高差中数偶然中误差1千米高差中数全中误差基辅分划或黑红面读数之差基辅分划、黑红面两次测高差之差往返较差及附合或环线闭合差单程双测站所测高差较差检测已测测段高差之差观测次数(工测)与已知点联测附合或环形≤±3≤±61.0/2.0 1.5/3.0平原、丘陵±12山区±15工测4≤±20往、返各一次铟瓦尺往一双面尺往一次≤±5≤±10 3.0 5.0平原、丘陵±20、山区±25工测64.0≤±30双面尺往、返各一次双面尺往一次≤±1530 单面尺往、返各一次单面尺往一次L—路线长度km,n—测站数水准仪视子准轴与水准管轴的夹角I,在作业前开始的第一周内每天测定一次,稳定后每隔15天测定一次。
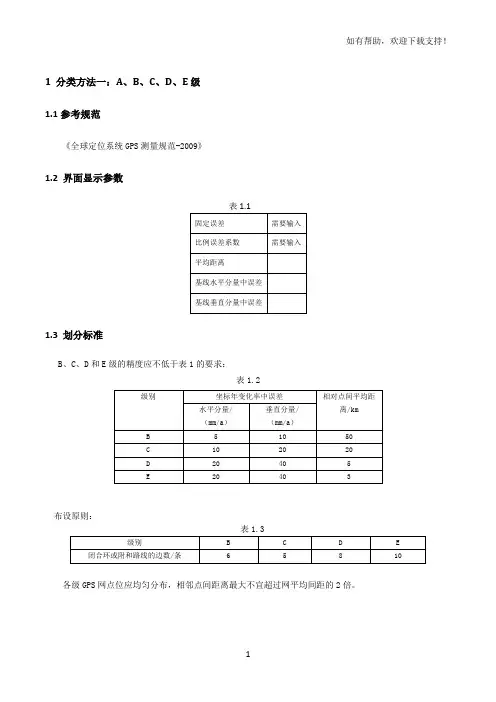
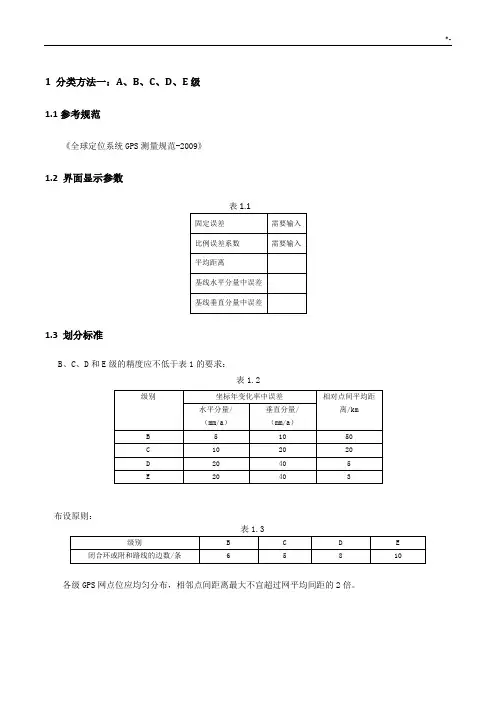
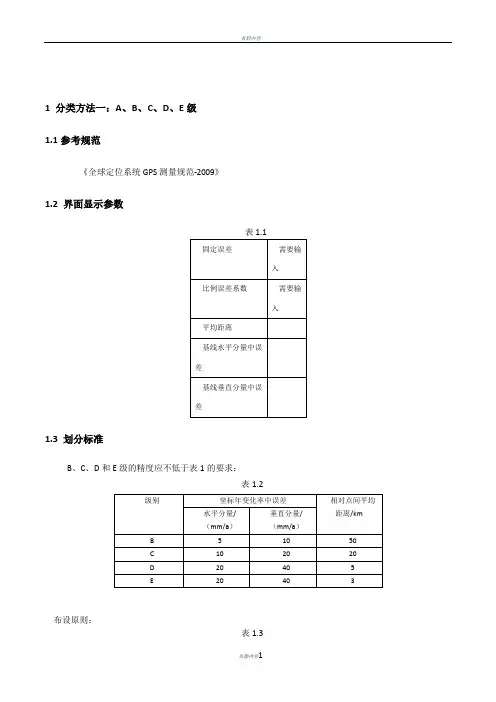
1 分类方法一:A、B、C、D、E级1.1参考规范《全球定位系统GPS测量规范-2009》1.2 界面显示参数1.3 划分标准B、C、D和E级的精度应不低于表1的要求:表1.2布设原则:表1.3各级GPS网点位应均匀分布,相邻点间距离最大不宜超过网平均间距的2倍。
接收机的选用:表1.4观测:表1.5数据处理(1)外业数据检核1)B级GPS网基线外业预处理和C、D、E级GPS网基线处理,复测基线的长度较差ds应满足公式1.1的规定:ds≦2σ (1.1)σ---为基线测量中误差,单位为毫米2)B、C、D、E级GPS网基线测量中误差σ采用外业测量时使用的GPS接收机的标称精度,计算时变长按实际平均边长计算。
3)B、C、D、E级GPS网同步环闭合差,不宜超过以下规定:三边同步环中只有两个同步边成果可以视为独立的成果,第三边成果应为其余两边的代数和。
由于模型误差和处理软件的内在缺陷,第三边处理结果与前两边的代数和常不为零,其差值应符合公式1.2≦≦≦(1.2)式中:σ----基线测量中误差,单位为毫米,计算按12.2.5规定执行。
对于四站以上同步观测时段,在处理完个边观测值后,应检查一切可能的三边环闭合差。
4) B、C、D、E级GPS网外业基线的处理结果,其独立闭合环或附和路线坐标闭合差W S和各坐标分量闭合差应满足公式(1.3)的规定。
≦3σ≦3σ≦3σ≦3σ(1.3)W S=n为闭合环数。
(2)基线向量解算基本要求(略参考规范12.3.3节)2 分类方法二:城市二、三、四等和一、二级城市或工程GPS按相邻点的平均距离和精度划分为二、三、四等和一、二级。
2.1参考规范《全球定位系统城市测量技术规范-1997》2.2 界面显示参数2.3 划分标准1)各等级GPS网相邻点间弦长精度应按公式2.1计算σ=(2.1)式中σ----标准差(基线向量的弦长中误差mm);a-----固定误差(mm);b-----比例误差系数(1X10-6);d-----相邻点间的距离(km)。
GPS在高程测量中的误差来源及应对措施【摘要】本文通过GPS在高程中的误差分析,对提高GPS测量高程精度的方法及措施进行了详细描述。
【关键词】GPS;大地高;正常高;高程拟合;高程异常一、引言众所周知,GPS作为现代化的三维测量工具,已被越来越广泛地运用到平面测量工作中去,如平面控制测量、地形测量、施工测量等。
但是GPS在实际的工作实践中,却较少运用于高程测量。
这是由于我国幅员辽阔,GPS测高受区域性大地水准面的限制以及仪器和外界条件等诸方面因素的影响,所测高程精度较低,无法满足各项工程建设的需要。
那么GPS测量高程的误差主要有哪些呢?我们又如何采取有效措施来提高高程测量精度呢?二、GPS高程测量原理利用GPS求得的是地面点在WGS-84坐标系中的大地高H84,而我国高程采用正常高。
要想使GPS高程在工程实际中得到应用,必须实现GPS大地高向我国正在使用的正常高的转化。
如图1所示。
有公式:Hr=H84-ζ由上式可知GPS高程测量的结果Hr误差主要由大地高H84的误差和高程异常ζ的误差的组成。
三、影响大地高H84的误差来源1.相位整周模糊度解算对GPS高程的影响。
相位整周模糊度解算是否可靠,直接影响三维坐标的精度。
在控制测量中,无论采用快速静态或实时动态测量技术,都必须精确解算得到相位整周数,然而相位整周数模糊度的解算常常会出现解算错误的可能性,从而会影响高程测量的精度。
2.多路径效应的制约因素:所谓多路径效应是指测站附近反射物反射来自卫星的信号与卫星直接发射的信号同时被接收机接受,这两种信号产生相互影响使其观测值偏离其真值,产生多路径误差。
多路径效应的影响分为直接的和间接的,并能对三维坐标产生分米级影响。
3.电离层延迟对高程测量量的影响:电离层对GPS测量的影响主要有:电离层群延(绝对测距误差);电离层载波相位超前(相对测距误差);电离层多普勒频移(距速误差);振幅闪烁信号衰减;磁暴、太阳耀斑等,这些电离层的变化都会延迟GPS信号的传播路线。
1 分类方法一:A、B、C、D、E级1.1参考规范《全球定位系统GPS测量规范-2009》1.2 界面显示参数1.3 划分标准B、C、D和E级的精度应不低于表1的要求:表1.2布设原则:表1.3各级GPS网点位应均匀分布,相邻点间距离最大不宜超过网平均间距的2倍。
接收机的选用:表1.4级别 B C D、E单频/双频双频/全波长双频/全波长双频/单频观测量至少有L1、L2载波相位L1、L2载波相位L1载波相位同步观测机数≥4 ≥3 ≥2观测:表1.5级别级别B C D E卫星截止高度角/度10 15 15 15同时观测有效卫星数≥4 ≥4 ≥4 ≥4有效观测卫星总数≥20 ≥6 ≥4 ≥4 观测时段数≥3 ≥2 ≥1.6 ≥1.6时段长度≥23h ≥4h ≥60min ≥40min采样间隔30 10-30 5-15 5-15注1:计算有效观测卫星总数时,应该各时段的有效观测卫星扣除期间的重复卫星数注2:观测时段长度,应为开始纪律数据到结束记录的时间段注3:观测时段≥1.6,指采用网观测模式时,每站至少观测一时段,其中二次设站点数应不少于GPS网总点数的60%注4:采用基于卫星定位连续运行基准站点观测模式时,可连续观测,但观测时间应不低于表中规定的各时段观测时间的和数据处理(1)外业数据检核1)B级GPS网基线外业预处理和C、D、E级GPS网基线处理,复测基线的长度较差ds应满足公式1.1的规定:ds≦2σ (1.1)σ---为基线测量中误差,单位为毫米2)B、C、D、E级GPS网基线测量中误差σ采用外业测量时使用的GPS接收机的标称精度,计算时变长按实际平均边长计算。
3)B、C、D、E级GPS网同步环闭合差,不宜超过以下规定:三边同步环中只有两个同步边成果可以视为独立的成果,第三边成果应为其余两边的代数和。
由于模型误差和处理软件的内在缺陷,第三边处理结果与前两边的代数和常不为零,其差值应符合公式1.2≦≦≦(1.2)式中:σ----基线测量中误差,单位为毫米,计算按12.2.5规定执行。
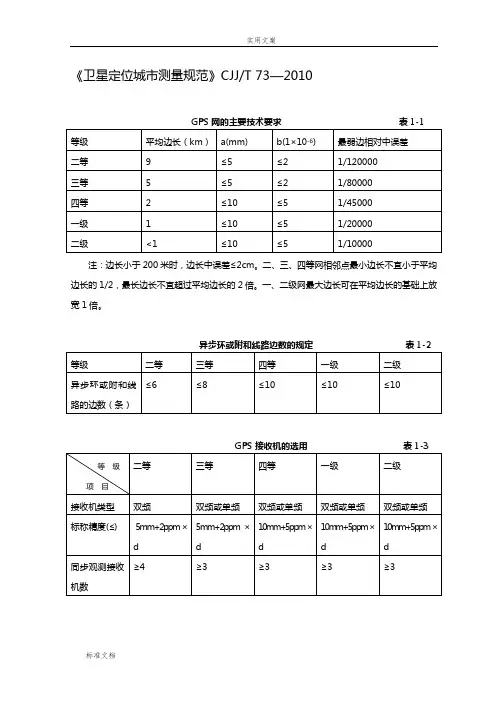
《卫星定位城市测量规范》CJJ/T 73—2010注:边长小于200米时,边长中误差≤2cm。
二、三、四等网相邻点最小边长不宜小于平均边长的1/2,最长边长不宜超过平均边长的2倍。
一、二级网最大边长可在平均边长的基础上放宽1倍。
各项限差规定 σ())((22bd a +=σ采用表1-1加乘常数) 同步环闭合差限差σω53x ≤, σω53y ≤, σω53z ≤, σω53≤ 同步环只计算三边同步环,))((22bd a +=σ,d 按照该等级平均边长计算,ω—环闭合差,222z y x ωωωω++=异步环闭合差限差σωn 2x ≤, σωn 2y ≤, σωn 2z ≤, σωn 32≤n —独立环的边数,d 按照该等级平均边长计算,))((22bd a +=σ,ω—环闭合差,222z y x ωωωω++=重复基线限差复测基线的长度较差ds ,同一基线不同时段较差应满足 σ23ds ≤(σ按照实际边长计算)三维无约束平差中,基线分量的改正数(X V ∆,Y V ∆,Z V ∆)绝对值应满足下列要求σ∆3V X ≤,σ∆3V Y ≤,σ∆3V Z ≤))((22bd a +=σd 按照基线边长计算约束平差中,基线分量的改正数与经过剔除粗差后的无约束平差结果的同一基线相应改正数较差应满足下列要求(或者进行已知点检查,已知点点位变化相对于约束点的边长相对中误差不应低于表1-1规定的上一等级控制网中最弱边相对中误差)σ∆2dV X ≤,σ∆2dV Y ≤,σ∆2dV Z ≤))((22bd a +=σd 按照基线边长计算《工程测量规范》GB50026-2007控制网测量中误差m ≤σ⎥⎦⎤⎢⎣⎡=n WW N 31m ,N 为控制网中异步环的个数,n 为异步环边数,W 为异步环全长闭合差。
各项限差规定σ ())((22bd a +=σ采用表2-1加乘常数) 同步环闭合差限差σω5n x ≤, σω5n y ≤, σω5n z ≤, σω5n 3≤ n —同步环的边数,))((22bd a +=σ,d 按照该等级平均边长计算,ω—环闭合差,222z y x ωωωω++=异步环闭合差限差σωn 2x ≤, σωn 2y ≤, σωn 2z ≤, σωn 32≤n —独立环的边数,d 按照该等级平均边长计算,))((22bd a +=σ,ω—环闭合差,222z y x ωωωω++=重复基线限差复测基线的长度较差ds ,同一基线不同时段较差应满足 σ23ds ≤(σ按照实际边长计算)三维无约束平差中,基线分量的改正数(X V ∆,Y V ∆,Z V ∆)绝对值应满足下列要求σ∆3V X ≤,σ∆3V Y ≤,σ∆3V Z ≤))((22bd a +=σd 按照基线边长计算约束平差中,控制网的最弱边边长相对中误差,应满足表2-1中相应等级的规定。
I角对于特级水准观测的仪器不得大于10″,对于一二级水准观测仪器不得大2、高程控制水准测量主要技术要求(mm)S为边长(km),H为基本等高距(m),D为测距边长(km),仪器和觇板三、地下铁道、轻轨交通工程测量规范1 精密导线测量主要技术要求n—为导线的角度个数,1)角度闭合差允许值wβ=±5,相邻边长不宜相差过三、铺轨基标测量1 一般规定1.1根据铺轨综合设计图,利用调整好的线路中线点或施工控制导线点和施工控制水准点测设铺轨基标。
1.2铺轨基标测设时,应首先测设控制基标,后在控制基标间测设加密基标和道岔铺轨基标。
控制基标在直线段每120米设置一个。
曲线线路除曲线元素点设置控制基标外,还应每60米设置一个。
加密基标在直线线路每隔6米,曲线每隔5米设置一个。
1.3铺轨基标一般设置在线路中线上,或按设计要求可设置在线路中线一侧,道岔铺轨基标一般设置在直股和曲股的两侧。
1.4铺轨基标标志按规范要求设计。
2 控制基标测量2.1 控制基标测量方法1)控制基标设置在线路中线上时,应在直线上采用截距法在曲线上采用偏角法测设。
2)控制基标设置在线路一侧时,可根据曲线要素点和控制基标与线路中线的关系,计算出其坐标后,直接按坐标测设。
3)也可先在线路中线上,测定设置控制基标位置的线路法线方向,然后在此方向上按控制基标与线路中线的距离确定控制基标位置。
2.2 控制基标埋设要求1)基标点埋设在结构底板上,采取有效的措施保证点位牢固,外型美观。
2)以±2mm的精度,调整基标标志螺杆到设计位置,并初步固定。
当控制基标埋设完成后,对其进行检测。
2.3控制基标检测的内容、方法与各项限差应满足下列要求:1)检查控制基标间夹角时,其左、右角各测二测回,左、右角平均值之和与360°较差小于5″,距离往返观测各二测回。
控制基标测设形式为等高等距。
2)直线段控制基标间的夹角与180°较差应小于8″,实测距离与设计距离较差应小于10mm,曲线段控制基标间夹角与设计值较差计算出的线路横向偏差应小于2mm,弦长测量值与设计值较差应小于5mm。
对《全球定位系统(GPS)测量规范》个别规定的讨论摘要: gps是随着现代科学技术的迅速发展而建立起来的新一代精密卫星导航定位系统,它在海洋大地测量学、航空与卫星遥感、工程测量及工程变形监测等方面应用更加广泛,尤其对经典测量学的各个方面产生了极其深刻的影响。
通过多年的实践,本文从《全球定位系统(gps)测量规范》(gb/t 18314—2009)实际使用情况和执行该《规范》所出现的问题入手,讨论该《规范》个别条款可能存在的不合理性,分析出现问题的原因及应对措施,供使用该《规范》的作业人员参考。
关键词:导航定位、gps规范、控制测量、出现的问题、应对措施中图分类号: p228 文献标识码: a 文章编号:一、问题的发现2012年10月,我们施测了芜湖市某d级网,共埋设标石8个,基线20条,平均边长4952米,topcongps接收机标称精度3mm+1ppm, 基线测量中误差σ=√(a2+( b×d×10-6)2),以此d级网为例,加以分析。
外业数据质量检核外业数据质量检核包括:复测基线较差ds;同步环坐标分量闭合差dx、dy、dz;异步环坐标分量闭合差wx、wy、wz、ws;相邻点基线分量中误差等项目。
复测基线: 复测基线长度较差最大ds= 3.6mm,小于16.4mm限差。
同步环坐标分量闭合差:坐标分量闭合差dx最小为5.4mm,dy最小为2.4mm,dz最小4.4mm,由此可见:dx、dy、dz均大大超过2mm的限差要求。
异步环坐标分量闭合差:坐标分量闭合差wx最大为12.8mm,wy最大为11.6mm,wz最大为16.9mm,环线全长闭合差ws最大为21.2mm,可见:wx、wy、wz、ws均小于34.74mm或60.17mm的限差要求。
相邻点基线分量中误差:水平分量dx最大9.3mm,dy最大11.2mm, 垂直分量dz最大9.6mm。
dx、dy、dz均小于20mm或40mm的限差要求。
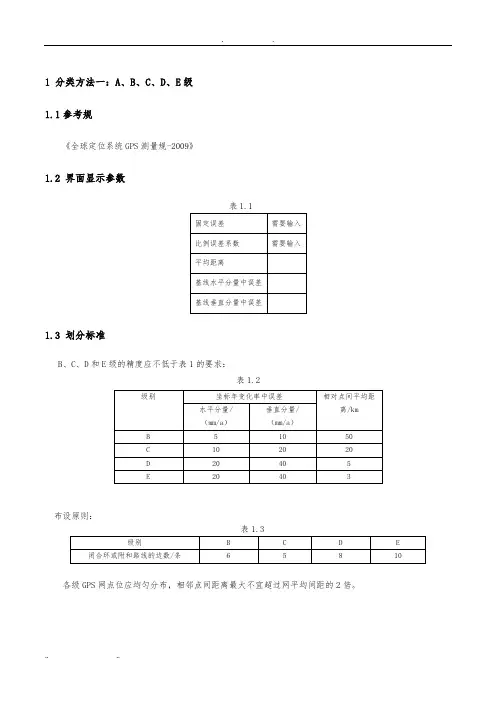
1 分类方法一:A、B、C、D、E级1.1参考规《全球定位系统GPS测量规-2009》1.2 界面显示参数1.3 划分标准B、C、D和E级的精度应不低于表1的要求:表1.2布设原则:表1.3各级GPS网点位应均匀分布,相邻点间距离最大不宜超过网平均间距的2倍。
接收机的选用:表1.4级别 B C D、E单频/双频双频/全波长双频/全波长双频/单频观测量至少有L1、L2载波相位L1、L2载波相位L1载波相位同步观测机数≥4 ≥3 ≥2观测:表1.5级别级别B C D E卫星截止高度角/度10 15 15 15同时观测有效卫星数≥4 ≥4 ≥4 ≥4有效观测卫星总数≥20 ≥6 ≥4 ≥4 观测时段数≥3 ≥2 ≥1.6 ≥1.6时段长度≥23h ≥4h ≥60min ≥40min采样间隔30 10-30 5-15 5-15注1:计算有效观测卫星总数时,应该各时段的有效观测卫星扣除期间的重复卫星数注2:观测时段长度,应为开始纪律数据到结束记录的时间段注3:观测时段≥1.6,指采用网观测模式时,每站至少观测一时段,其中二次设站点数应不少于GPS网总点数的60%注4:采用基于卫星定位连续运行基准站点观测模式时,可连续观测,但观测时间应不低于表中规定的各时段观测时间的和数据处理(1)外业数据检核1)B级GPS网基线外业预处理和C、D、E级GPS网基线处理,复测基线的长度较差ds应满足公式1.1的规定:ds≦2σ (1.1)σ---为基线测量中误差,单位为毫米2)B、C、D、E级GPS网基线测量中误差σ采用外业测量时使用的GPS接收机的标称精度,计算时变长按实际平均边长计算。
3)B、C、D、E级GPS网同步环闭合差,不宜超过以下规定:三边同步环中只有两个同步边成果可以视为独立的成果,第三边成果应为其余两边的代数和。
由于模型误差和处理软件的在缺陷,第三边处理结果与前两边的代数和常不为零,其差值应符合公式1.2≦≦≦(1.2)式中:σ----基线测量中误差,单位为毫米,计算按12.2.5规定执行。
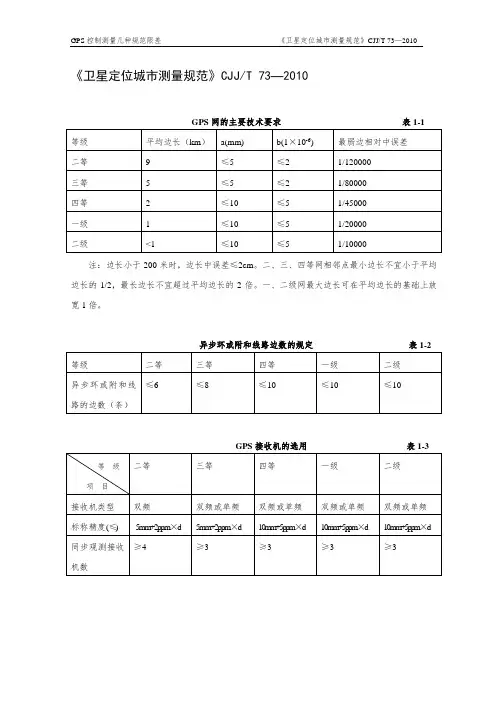
《卫星定位城市测量规范》CJJ/T 73—2010GPS网的主要技术要求表1-1注:边长小于200米时,边长中误差≤2cm。
二、三、四等网相邻点最小边长不宜小于平均边长的1/2,最长边长不宜超过平均边长的2倍。
一、二级网最大边长可在平均边长的基础上放宽1倍。
异步环或附和线路边数的规定表1-2GPS 测量各等级作业的基本技术要求 表1-4各项限差规定 σ())((22bd a +=σ采用表1-1加乘常数) 同步环闭合差限差σω53x ≤, σω53y ≤, σω53z ≤, σω53≤ 同步环只计算三边同步环,))((22bd a +=σ,d 按照该等级平均边长计算,ω—环闭合差,222z y x ωωωω++=异步环闭合差限差σωn 2x ≤, σωn 2y ≤, σωn 2z ≤, σωn 32≤n —独立环的边数,d 按照该等级平均边长计算,))((22bd a +=σ,ω—环闭合差,222z y x ωωωω++=重复基线限差复测基线的长度较差ds ,同一基线不同时段较差应满足 σ23ds ≤(σ按照实际边长计算)三维无约束平差中,基线分量的改正数(X V ∆,Y V ∆,Z V ∆)绝对值应满足下列要求σ∆3V X ≤,σ∆3V Y ≤,σ∆3V Z ≤))((22bd a +=σd 按照基线边长计算约束平差中,基线分量的改正数与经过剔除粗差后的无约束平差结果的同一基线相应改正数较差应满足下列要求(或者进行已知点检查,已知点点位变化相对于约束点的边长相对中误差不应低于表1-1规定的上一等级控制网中最弱边相对中误差)σ∆2dV X ≤,σ∆2dV Y ≤,σ∆2dV Z ≤))((22bd a +=σd 按照基线边长计算《工程测量规范》GB50026-2007GPS 网的主要技术要求 表2-1控制网测量中误差m ≤σ⎥⎦⎤⎢⎣⎡=n WW N31m ,N 为控制网中异步环的个数,n 为异步环边数,W 为异步环全长闭合差。

GPS RTK测量技术规程Technical Specifications For GPS RTK Surveys1 总则1.1 为了GPS RTK技术在治黄测绘及其它相关领域内推广应用,统一RTK作业方法、仪器使用要求、数据处理方法,特制定本规程。
1.2本标准参照与引用的标准1.2.1 《全球定位系统(GPS)测量规范》(GB/T18314-2001);1.2.2 《全球定位系统城市测量技术规程》(CJJ73-97);1.2.3 《公路全球定位系统(GPS)测量规范》(JTJ/T066-98);1.2.4 《全球定位系统(GPS)测量型接收机检定规程》(CH8016-1995)。
1.3 本规程适用于四等平面以下、等外水准控制测量、放样测量、地形测量(包括水下地形测量)、断面测量,以及当采用RTK技术辅助水文测验、河道冲淤监测时亦可参照本规程。
2 术语2.1全球定位系统(GPS ) Global Position SystemGPS是由美国研制的导航、授时和定位系统。
它由空中卫星、地面跟踪监控站、和用户站三部分组成,具有在海、陆、空进行全方位实时三维导航与定位能力。
GPS系统的特点是高精度、全天候、高效率、多功能、操作简便、应用广泛等。
2.2 实时动态测量(RTK) Real Time KinematicRTK定位技术是基于载波相位观测值的实时动态定位技术,它能够实时地提供测站点在指定坐标系中的三维定位结果,并达到厘米级精度。
在RTK作业模式下,基准站通过数据链将其观测值和测站坐标信息一起传送给流动站。
流动站不仅通过数据链接收来自基准站的数据,还要采集GPS观测数据,并在系统内组成差分观测值进行实时处理。
流动站可处于静止状态,也可处于运动状态。
RTK 技术的关键在于数据处理技术和数据传输技术。
2.3 观测时段 Observation测站上开始接收卫星信号到停止接收,连续观测的时间长度。
2.4 同步观测 Simultaneous Observation两站或两站以上接收机同时对同一组卫星进行观测。
GPS RTK图根控制测量规范本标准是根据我国现阶段全球定位系统实时动态(RTK)测量的技术水平制定的。
本标准内容涉及目前应用广泛的单参考站RTK测量技术和基于CORS系统的网络RTK测量技术。
本标准是在GB/T 18314《全球定位系统(GPS)测量规范》、CJJ 73《全球定位系统城市测量技术规程》、GB50026《工程测量规范》的基础上,结合生产实际的情况制定的。
全球定位系统实时动态(RTK)定位测量除应符合本标准的要求外,还应符合国家现行的有关强制性标准、规范的规定。
全球定位系统实时动态(RTK)测量技术规范1 范围本标准规定利用全球定位系统实时动态测量(RTK)技术,实施平面一级、二级、三级控制测量和五等高程控制测量、地形测量的技术要求、方法。
其他相应精度的定位测量可参照本标准执行。
2 引用标准下列文件中的条款通过本标准的引用而成为本标准的条款。
凡是注日期的引用文件,其随后所有的修改单(不包括勘误的内容)或修订版均不适用于本标准,然而,鼓励根据本标准达成协议的各方研究是否可使用这些文件的最新版本。
凡是不注日期的引用文件,其最新版本适用于本标准。
GB/T 18314全球定位系统(GPS)测量规范CJJ 73 全球定位系统城市测量技术规程CH/T 2008-2005 全球导航卫星系统连续运行参考站网建设规范CH 8016 全球定位系统(GPS)测量型接收机检定规程GB 50026 工程测量规范GB/T 14912 1∶500 1∶1000 1∶2000外业数字测图技术规程3 术语3.1 实时动态测量(RTK) Real Time KinematicRTK测量技术是全球卫星导航定位技术与数据通信技术相结合的载波相位实时动态差分定位技术,它能够实时地提供测站点在指定坐标系中的三维定位结果。
在RTK测量模式下,参考站通过数据链将其观测值和测站坐标信息一起传送给流动站,流动站不仅采集卫星观测数据,还通过数据链接收来自参考站的数据,并在系统内组成差分观测值进行实时处理。
GPS RTK图根控制测量规范本标准是根据我国现阶段全球定位系统实时动态(RTK)测量的技术水平制定的。
本标准内容涉及目前应用广泛的单参考站RTK测量技术和基于CORS系统的网络RTK测量技术。
本标准是在GB/T 18314《全球定位系统(GPS)测量规范》、CJJ 73《全球定位系统城市测量技术规程》、GB50026《工程测量规范》的基础上,结合生产实际的情况制定的。
全球定位系统实时动态(RTK)定位测量除应符合本标准的要求外,还应符合国家现行的有关强制性标准、规范的规定。
全球定位系统实时动态(RTK)测量技术规范1 范围本标准规定利用全球定位系统实时动态测量(RTK)技术,实施平面一级、二级、三级控制测量和五等高程控制测量、地形测量的技术要求、方法。
其他相应精度的定位测量可参照本标准执行。
2 引用标准下列文件中的条款通过本标准的引用而成为本标准的条款。
凡是注日期的引用文件,其随后所有的修改单(不包括勘误的内容)或修订版均不适用于本标准,然而,鼓励根据本标准达成协议的各方研究是否可使用这些文件的最新版本。
凡是不注日期的引用文件,其最新版本适用于本标准。
GB/T 18314全球定位系统(GPS)测量规范CJJ 73 全球定位系统城市测量技术规程CH/T 2008-2005 全球导航卫星系统连续运行参考站网建设规范CH 8016 全球定位系统(GPS)测量型接收机检定规程GB 50026 工程测量规范GB/T 14912 1∶500 1∶1000 1∶2000外业数字测图技术规程3 术语实时动态测量(RTK) Real Time KinematicRTK测量技术是全球卫星导航定位技术与数据通信技术相结合的载波相位实时动态差分定位技术,它能够实时地提供测站点在指定坐标系中的三维定位结果。
在RTK测量模式下,参考站通过数据链将其观测值和测站坐标信息一起传送给流动站,流动站不仅采集卫星观测数据,还通过数据链接收来自参考站的数据,并在系统内组成差分观测值进行实时处理。
一、建筑变形测量I角对于特级水准观测的仪器不得大于10″,对于一二级水准观测仪器不得大于15″,铟瓦水准尺、尺垫。
二、城市测量规1 平面控制光电测距导线的主要技术指标n测站数边长测距观测要求及限差2 高程控制水准测量主要技术要求(mm)L—路线长度km,n—测站数水准仪视子准轴与水准管轴的夹角I,在作业前开始的第一周每天测定一次,稳定后每隔15天测定一次。
二等测量I不大于15″,三、四等水准测量I不大于20″、尺垫。
水准观测的视线长度、前后视距差和视线高度(m)常规测图开阔地区每平方公里控制点密度(点/km2)光电测距图根导线测量要求图根光电测距极坐标法测量技术要求图根三角高程测量技术要求S为边长(km),H为基本等高距(m),D为测距边长(km),仪器和觇板高(棱镜中心高)精确量取至mm。
图根水准闭合差不得超过±40mm,山地千米超过16站时,不应超过±12mm。
简单计算配赋。
地物点、地形点测距长度、点间距要求m三、地下铁道、轻轨交通工程测量规1 精密导线测量主要技术要求n—为导线的角度个数, 1)角度闭合差允许值wβ=±5,相邻边长不宜相差过大,个别边不宜短于100米,2)精密导线点上只有两个方向时,按左、右角观测,左、右角平均值之和与360°的较差应小于4″。
3)在附合精密导线两端的GPS点上观测时,应联测两个高级方向,若只能观测到一个时,应增加测回数。
4)导线边应往返观测二个测回,每测回三次读数较差小于5mm,测回较差小于3mm,往返测平均值较差小于5mm。
5)气象数据每条边在一端测定一次。
精密导线按严密方法平差。
6)全站仪分级标准L—路线往返测段或附合长度km,n—测站数3 精密水准测量的观测方法:1 往测奇数站:后—前—前—后,2 返测奇数站:前—后—后--前偶数站:前—后—后--前。
偶数站:后—前—前—后。
4精密水准观测视线长度、视距差、视线高的要求(m)5精密水准测量的测站观测限差(mm)三、铺轨基标测量1 一般规定1.1根据铺轨综合设计图,利用调整好的线路中线点或施工控制导线点和施工控制水准点测设铺轨基标,1.2铺轨基标测设时,应首先测设控制基标,后在控制基标间测设加密基标和道岔铺轨基标。
GPS RTK测量数据的精度控制摘要:精度控制是GPS RTK测量工作中极其重要的一个环节,本文结合实践经验,根据RTK测量的特征,分析影响GPS RTK精度控制的原因,总结RTK 测量精度控制的方法。
关键词:GPS RTK测量技术;精度控制;坐标转换引言实时动态测量(RTK,即Real Time Kinematic)定位技术是基于载波相位观测值的实时动态差分定位技术,它能够实时地提供测站点在指定坐标系中的三维坐标,可以达到厘米级精度。
GPS RTK技术广泛应用于是控制测量、地形测图、工程放样和导航定位等业务领域,颠覆了传统意义上的导线测量作业模式,大大提高了作业效率。
但是,在实际应用的过程中也会出现一些偏差,需要进行精度控制。
2、影响RTK测量技术精度控制的原因2.1 RTK测量技术精度控制的内容RTK测量的精度控制主要是指为达到规范或规定对数据质量要求而采取的作业技术和措施。
RTK测量的质量主要是指RTK测量成果的精度,要保证其测量精度,提高测量成果的可靠性,必须从RTK测量的精度要求,不同等级RTK 测量的技术要求以及基准站和流动站的设置等方面来考虑,减少误差来源。
2.2影响RTK测量技术精度控制的因素RTK作业误差一般包括:1、同仪器和GPS卫星有关的误差,包括天线相位中心变化、轨道误差、钟误差、观测误差等。
2、同信号传播有关的误差。
包括电离层误差、对流层误差、多路径效应、信号干扰等。
其中同仪器和GPS 卫星有关的误差和部分同信号传播有关的误差可通过各种校正方法予以削弱。
而在实际作业中,与RTK测量有关的误差主要来源于:参考站的信号质量,参考站流动站的设置,流动站与参考站的距离,转换参数的精度,外界环境的影响等。
(1)参考站的信号质量:参考站观测数据质量的好坏、无线电的信号传播质量的好坏对测量结果影响很大。
所以同信号传播有关的误差将随流动站至参考站的距离的增加而加大,RTK测量的有效作业半径一般在在10km之内。
《卫星定位城市测量规范》CJJ/T 73—2010
GPS网的主要技术要求表1-1
注:边长小于200米时,边长中误差≤2cm。
二、三、四等网相邻点最小边长不宜小于平均边长的1/2,最长边长不宜超过平均边长的2倍。
一、二级网最大边长可在平均边长的基础上放宽1倍。
GPS接收机的选用表1-3
各项限差规定 σ())((2
2
bd a
+=σ采用表1-1加乘常数)
同步环闭合差限差 σω5
3x ≤
, σω5
3y ≤
, σω5
3z ≤
, σω5
3≤
同步环只计算三边同步环,))((2
2
bd a
+=σ,d 按照该等级平均边长计算,ω—环闭合差,
2
22z y x ωωωω++=
异步环闭合差限差
σωn 2x ≤, σωn 2y ≤, σωn 2z ≤, σωn 32≤
n —独立环的边数,d 按照该等级平均边长计算,))((2
2
bd a
+=
σ,ω—环闭合差,
2
22z y x ωωωω++=
重复基线限差
复测基线的长度较差ds ,同一基线不同时段较差应满足 σ23ds ≤(σ按照实际边长
计算)
三维无约束平差中,基线分量的改正数(X V ∆,Y V ∆,Z V ∆)绝对值应满足下列要求
σ∆3V X ≤,σ∆3V Y ≤,σ∆3V Z ≤
))((2
2
bd a
+=σ
d 按照基线边长计算
约束平差中,基线分量的改正数与经过剔除粗差后的无约束平差结果的同一基线相应改正数较差应满足下列要求(或者进行已知点检查,已知点点位变化相对于约束点的边长相对中误差不应低
于表1-1规定的上一等级控制网中最弱边相对中误差)
σ∆2dV X ≤,σ∆2dV Y ≤,σ∆2dV Z ≤
))((2
2
bd a
+=σ
d 按照基线边长计算
《工程测量规范》GB50026-2007
GPS 网的主要技术要求 表2-1
控制网测量中误差m ≤σ ⎥⎦
⎤
⎢⎣⎡=
n WW N 31m ,N 为控制网中异步环的个数,n 为异步环边数,W 为异步环全长闭合差。
GPS 测量各等级作业的基本技术要求
表2-2
各项限差规定σ ())((2
2
bd a
+=σ采用表2-1加乘常数)
同步环闭合差限差 σω5
n x ≤
, σω5n y ≤
, σω5
n z ≤
, σω5
n 3≤
n —同步环的边数,))((2
2
bd a
+=σ,d 按照该等级平均边长计算,ω—环闭合差,
2
22z y x ωωωω++=
异步环闭合差限差
σωn 2x ≤, σωn 2y ≤, σωn 2z ≤, σωn 32≤
n —独立环的边数,d 按照该等级平均边长计算,))((2
2
bd a
+=
σ,ω—环闭合差,
222z y x ωωωω++=
重复基线限差
复测基线的长度较差ds ,同一基线不同时段较差应满足 σ23ds ≤(σ按照实际边长
计算)
三维无约束平差中,基线分量的改正数(X V ∆,Y V ∆,Z V ∆)绝对值应满足下列要求
σ∆3V X ≤,σ∆3V Y ≤,σ∆3V Z ≤
))((2
2
bd a
+=σ
d 按照基线边长计算
约束平差中,控制网的最弱边边长相对中误差,应满足表2-1中相应等级的规定。
《全球定位系统(GPS)测量规范》GB/T18314-2009
表3-1
GPS接收机的选用表3-3
下面各项限差规定中使用的σ())((2
2
bd a
+=σ采用外业测量时使用的GPS 接收机的
标称精度,计算时边长d 按实际平均边长计算。
)
同步环闭合差限差(对于4站以上同步观测时段,在处理完各边观测值后,应检查一切可能的三边环闭合差)
σω5
3x ≤
, σω5
3y ≤
, σω5
3z ≤
, σω5
3≤
同步环只计算三边同步环,ω—环闭合差,2
2
2
z y x ωωωω++=
异步环闭合差或附合路线坐标差限差ω及坐标分量闭合差应满足下列要求
σωn 3x ≤, σωn 3y ≤, σωn 3z ≤, σωn 33≤
n —独立环的边数,ω—环闭合差,2
22z y x ωωωω++=
重复基线限差
复测基线的长度较差ds ,同一基线不同时段较差应满足 σ23ds ≤(σ按照实际边长
计算)
三维无约束平差中,基线分量的改正数(X V ∆,Y V ∆,Z V ∆)绝对值应满足下列要求
σ∆3V X ≤,σ∆3V Y ≤,σ∆3V Z ≤
))((2
2
bd a
+=σ d 按照基线边长计算
约束平差中,基线分量的改正数与经过剔除粗差后的无约束平差结果的同一基线,相应改正数较差的绝对值应满足下列要求(C 、D 、E 级网平差后,其精度应符合表3-1规定,国家三、四等大地控制网的B 、C 、D 级,其相对精度应分别不低于1×10-7、1×10-6、1×10-5。
) σ∆2dV X ≤,σ∆2dV Y ≤,σ∆2dV Z ≤
))((2
2
bd a
+=σ d 按照基线边长计算
《公路勘测规范》JTG C10—2007
GPS网的主要技术要求表4-1
注:四等及四等以上平面控制网中,相邻点之间的距离不得小于500米,一、二级平面控制网中平原、微丘区不得小于200米,重丘、山岭区不得小于100米。
最长距离不宜大于平均距离的2倍。
各项限差规定 σ())((2
2
bd a
+=σ采用表4-1加乘常数,d 为基线平均长度)
同步环闭合差限差 σω5
n x ≤
, σω5
n y ≤
, σω5
n z ≤
, σω5
n 2≤
n 为同步环边数,ω—环闭合差,222z y x ωωωω++=
异步环闭合差限差
σω3
n 4x ≤
, σω3
n 4y ≤
, σω3
n 4z ≤
, σωn 2≤
n —异步环中的边数,ω—环闭合差,222z y x ωωωω++=
重复基线限差
复测基线的长度较差ds ,同一基线不同时段较差应满足 σ22ds ≤(σ按照实际边长
计算)
三维无约束平差中,基线分量的改正数(X V ∆,Y V ∆,Z V ∆)绝对值应满足下列要求
σ∆3V X ≤
,σ∆3V Y ≤
,σ∆3V Z ≤
约束平差中,基线分量的改正数与经过剔除粗差后的无约束平差结果的同一基线相应改正数较差的绝对值应满足下列要求
σ∆3
4dV X ≤
,σ∆3
4dV Y ≤
,σ∆3
4dV Z ≤
))((2
2
bd a
+=σ
GPS测量规范各种限差计算表。