多无人机协同路径规划研究综述_袁利平
- 格式:pdf
- 大小:182.19 KB
- 文档页数:6
无人机交通管理中路径规划策略研究综述发布时间:2021-12-09T07:54:40.017Z 来源:《防护工程》2021年25期作者:万成才[导读] 如今无人机被广泛使用,在无人机空中交通管理中,路径规划是极其重要的一环。
安徽科力信息产业有限责任公司摘要:如今无人机被广泛使用,在无人机空中交通管理中,路径规划是极其重要的一环。
对无人机路径规划的自动控制策略的国内外研究现状进行了综述,简单介绍了无人机的控制系统和目前认可度较高的无人机交通管理系统,分别对单机飞行的路径预规划策略、多机协同飞行的任务规划及协同策略和无人机飞行中动态避障策略三个方面现有研究进行整合分析。
三方面的综述基本涵盖了国内外无人机相关路径规划的控制策略,并比较了常用策略的适用场景。
关键词:无人机;路径规划;协同控制;避障策略1无人机控制系统及交通管理系统1.1无人机控制系统无人机控制系统通常可以称为飞行控制系统,也是无人机的核心系统,相当于无人机的“大脑”。
该系统的作用主要是控制机体的起飞、着陆、姿态和方向,使无人机按照指定的航迹飞行,完成分配的任务,且在此过程中进行避障。
现在民用无人机的飞行控制系统一般是按照遥控指令进行控制,如果无指令或无法收到指令,则按照既定方案执行。
军用无人机的执行任务更为复杂,对无人机的控制要求也更高,除单机执行任务外,还需要能够多机协同完成任务。
1.2无人机交通管理系统无人机的交通管理系统应该包含飞行计划申请和审批系统、数据中心、管制系统和监视系统。
系统基于北斗RDSS和ADS-B的监视信息,将无人机的飞行计划数据和监视数据传送至数据中心,数据中心对这些数据进行融合处理,管制系统根据无人机的数据进行管制,同时也将管制信息传送回数据中心。
管制系统内的管制员和管制中心通过管制员工作站进行数据交互,如果遇到紧急情况,通过网络将应急信息发送至无人机的管控平台。
无人机的管控系统要能够实现四种功能:无人机的注册审批、数据接收与发送、飞行任务监管与违规报警、任务统筹规划。
大规模无人机群飞行路径规划与协同控制研究无人机技术的快速发展和广泛应用,使得大规模无人机群飞行成为可能。
大规模无人机群具备许多优势,如高度的机动性、灵活性和适应性,可以应用于飞行任务、监控任务、救援任务等领域。
然而,如何有效地规划和协同控制大规模无人机群的飞行路径仍然是一个具有挑战性的问题。
在大规模无人机群飞行中,路径规划的关键是确定每个无人机的飞行路径,以实现特定的任务目标。
针对无人机群的路径规划,有多种方法可以采用。
一种常见的方法是基于集群几何结构的路径规划。
该方法将无人机群划分为若干个子群,并通过规定子群之间的相互位置和关系来进行路径规划。
另一种方法是基于分布式算法的路径规划。
该方法中,每个无人机根据自身的感知信息和局部目标进行决策,并通过与其他无人机的通信和协作来达成整体的路径规划。
无人机群的协同控制是指无人机群中每个无人机的控制策略和动作需要与其他无人机相协调以实现整体目标。
协同控制的关键是解决无人机群中的冲突和碰撞问题。
一种常见的方法是通过分配无人机的任务和角色来避免冲突和碰撞。
例如,可以将无人机分为领航无人机和跟随无人机,在路径规划中保持一定的间隔。
此外,还可以采用集中式或分布式的控制方法,通过与其他无人机的通信和协作来实现无人机群的协同控制。
大规模无人机群飞行的路径规划和协同控制面临许多挑战。
首先,由于无人机数量的增加,路径规划算法的复杂性大大增加。
现有的路径规划算法需要考虑无人机之间的碰撞避免、避免路径冲突等问题。
其次,大规模无人机群的协同控制需要解决信息共享、通信延迟和数据处理等问题。
此外,不同类型的无人机和不同任务的无人机需要不同的控制策略和动作规划,这也增加了路径规划和协同控制的难度。
为了解决这些挑战,研究人员提出了一些解决方案。
一种解决方案是采用强化学习算法来进行路径规划和协同控制。
强化学习算法可以通过与环境的交互学习最优的路径规划和控制策略。
另一种解决方案是采用深度学习算法来进行路径规划和控制。
无人机协同任务规划研究随着无人机技术的不断发展,无人机的普及已经成为不可避免的趋势。
无人机作为新型空中机器人,在灾害救援、勘察测量、农业、物流等领域都有着广泛的应用。
无人机协同任务规划是无人机应用领域中的一个重要议题,也是应用无人机所需解决的问题之一。
本文将从无人机协同任务规划算法、任务规划的特点和需求以及应用场景等几个方面进行讨论。
无人机协同任务规划算法协同无人机任务规划是为多架无人机分配任务,让它们在特定的约束条件下完成目标任务。
其主要目的是提高整个系统的任务完成效率和协同配合能力,减少任务完成的时间和成本。
传统协同任务规划的方法有多种,如:区域划分法、模糊控制法、分布式算法、集成算法等。
区域划分法将任务区域按照一定的规则分成多个区域,每个无人机负责一个区域的任务,通过区域间的通讯和交互协同完成任务。
这种方法适用于无人机散乱分布的区域,但由于区域划分精度及划分方案的缺陷会导致任务分配不均,而容易出现浪费或任务无法完成的情况。
模糊控制法重在将模糊逻辑和控制工程技术有机地结合,有效地解决了无人机协同任务规划中的模糊信息处理问题。
但是,由于模糊规则的确定及极限区域的处理较为复杂,需要消耗大量的计算能力和算法时间,且难以满足分布式计算的需求。
分布式算法具有简单灵活、高效、抵抗干扰等优点。
它将整体控制分成局部控制,将任务分配和规划过程集成到局部控制中。
但由于任务分配过程需要大量的通讯交互,难以保证实时性。
集成算法是将多种算法进行整合,组成更加强大、稳健的实用系统。
这种方法将模糊控制法、分布式算法、区域划分法等多种算法进行集成,实现较为灵敏和高效。
任务规划的特点和需求无人机协同任务规划不同于单一无人机的任务规划。
首先,无人机协同任务规划的任务目标更为复杂,需要协同完成,而且协同完成的时间和完成效率直接影响到整个任务的完成情况。
其次,无人机有着自主飞行的能力,无论遇到任何困难都能够自行适应处理。
同时,无人机能够掌握其周边环境的信息和预测的能力,需要更多的情报支撑,更高的安全度。
多无人机协同任务规划技术探究引言:随着无人机技术的快速进步和广泛应用,无人机协同任务规划技术逐渐成为探究的焦点和热点。
的目标在于提高无人机系统的工作效率、降低任务执行成本,实现人与无人机的高效协同。
一、无人机协同任务规划技术的观点与特点无人机协同任务规划技术是指多架无人机在任务执行过程中互相合作、协调行动,依据任务需求和各自特点合理打算任务分工和路径规划的一种技术。
它具有以下特点:1. 多无人机协同:多架无人机之间需要进行协调、合作,完善任务规划,共同完成任务目标。
2. 任务需求和各自特点:针对不同的任务需求和各自无人机的特点,进行任务分工和路径规划。
3. 合理打算任务分工和路径规划:依据任务特点和各自无人机能力,合理地对任务分工和路径规划进行设计。
4. 高效协同:无人机间通过有效的通信与信息传递,实现任务分工和路径规划的协调。
二、多无人机协同任务规划技术的挑战与应对面临着以下挑战:1. 通信与信息共享问题:多无人机之间需要实时进行通信与信息共享,以协调行动和规划路径,提高协同效率。
2. 复杂环境问题:无人机在任务执行过程中往往处于复杂的环境中,如天气变化、地形限制等,如何在这种环境下,实现任务规划是一大难点。
3. 任务分工问题:多无人机在协同任务中,需要依据各自的特点和能力进行合理的任务分工,以达到高效协同。
4. 动态规划问题:在任务执行过程中,可能会发生突发状况或任务要求变化,无人机需要准时调整规划,适应新的任务要求。
针对以上挑战,我们需要实行以下手段来应对:1. 设计高效的通信与信息共享系统,保障多无人机之间的实时沟通与信息传递。
2. 利用先进的传感器技术和数据处理算法,实时监测和分析环境,进行任务规划。
3. 基于无人机的特点和能力,进行合理的任务分工和路径规划,提高协同效率。
4. 引入自适应规划算法,使无人机能够准时调整规划,应对任务执行过程中的变化。
三、多无人机协同任务规划技术的应用领域多无人机协同任务规划技术在各个领域都具有广泛的应用前景。
无人机群协同作战目标分配研究综述近年来,随着微机电技术、通信导航技术和人工智能技术迅速发展,无人机的智能化水平越来越高,数量众多的无人机组成无人机群应用在军事领域将有可能颠覆未来战争的规则。
无人机群作战是指由数量庞大、成本低廉的小型无人机组成蜂群作战系统,依托大数据、人工智能、无线自组网等技术协同作战。
在未来战场上,由数量众多的无人机对作战目标进行超饱和攻击,能有效提升己方的作战效能。
无人机群可以完成某些单架无人机难以完成的复杂任务,如大规模监视敌方、大范围信息搜集、执行多个同步任务等,但无人机数量的增多带来规模化增大,复杂度变高和众多安全隐患,在执行任务过程屮除了要考虑自身因素外,还要考虑目标和环境带来的约束等。
无人机群的协同目标规划,是在满足多方现实情况和约朿条件下,实现无人机与目标的配对分配,使作战效能最优,降低系统的耦合程度,提高协同性能和完成任务的质量。
无人机群协同作战目标分配(Collaborative TargetAllocation, CTA)首先是根据无人机群与作战目标的具体情况,结合各项约朿条件,建立无人机群任务分配的CTA模型,然后根据建立的模型,选择合适的智能算法进行求解,得到无人机与目标相对应的结果。
本文对无人机群协同作战目标分配进行研究,从CTA模型及其要素和常用智能算法两方面进行介绍,并根据研究结果对未来无人机群作战任务分配的研究方向进行预测。
01、CTA模型无人机群协同作战目标分配是基于战场环境和作战任务,为无人机群中的每架无人机分配一个或多个作战目标,使无人机群的整体作战效能最优。
分配目标,需要从无人机群、目标任务和约束条件三个要素考虑建立协同作战目标分配模型(CTA模型),CTA模型是依据实际问题简化后的数学模型,对Z求解可以得到无人机的目标分配结果。
无人机群是作战的主体,在目标分配过程屮无人机的数量和自身的物理性能会对分配结果产生影响。
无人机群中无人机与分配目标的数量的不同会产生不同的分配结果。
多目标多无人机协同任务规划探析摘要:无人机作战相比于载人飞行器具有更突出的优势,它既不需要考虑飞行员的生理极限,又可以进入高风险区域作战,有利于人员伤亡的降低,提高作战效费比。
多无人机协同任务规划属于现阶段无人机集群智能化发展的关键技术,任务分配和航迹规划在无人机任务规划技术中扮演着核心角色。
本文以多目标无人机协同任务规划作为研究对象,对多无人机协同任务规划系统进行简单介绍,然后分别分析了任务分配以及航迹规划相关内容,期望可以为相关工作的优化提供理论参考和更多思路。
关键词:多目标;多无人机;任务规划军事战场收益为面向全局,单架无人机只能发挥极其有限的作战效能,想要同时完成不同任务,对敌军形成压制,需要做到多无人机协同作战攻击多个目标,这样才能够赢得战斗[1]。
现阶段,各个国家的研究人员都在大力研究多无人机协同任务规划技术,在解决多目标优化问题时主要依靠传统数学规划法、市场机制法以及智能优化算法等,上述算法在时间、全局最优、规模复杂的优化组合等问题上依旧没有达到理想效果,仍需深入研究飞行过程威胁源突现,在线多机重规划协调能力等。
1.多无人机协同任务规划系统多无人机协同任务规划的研究基础为单无人机发展,因此其依旧具备明确任务、战场状态分析、任务规划等单无人机任务规划特性。
但是多无人机又与单无人机具有本质不同,主要体现在协同、协调能力方面,在具体规划时应当对时间协同以及空间协调充分考虑,导致任务规划的复杂度以及计算量大幅度提升。
多无人机任务协同规划原则应当在对各个单机物理性能以及任务需求全面考虑的基础上,进一步考虑机群之间的协同关系以及协调关系。
从功能方面多无人机协同任务规划主要包括任务分配以及航迹规划,其中前者应当遵守的原则有:分配适合无人机性能的目标、多无人机共同执行任务时间应当协调、面对不同任务要求规划全局最优多目标分配方案;后者航迹规划主要需要遵循的原则有:避开各类威胁因素、满足飞行约束条件以及飞行路径最优化[2]。
多无人机协同任务规划研究与实现多无人机协同任务规划研究与实现导言:近年来,随着无人机技术的不断发展和应用需求的增加,无人机协同任务规划成为了研究的热门领域。
无人机的协同任务规划是指多架无人机通过有效的规划和任务分配,实现协同工作并完成特定任务的过程。
本文将探讨多无人机协同任务规划的研究进展与实现方案,并展望未来的发展方向。
一、多无人机协同任务规划的研究进展随着无人机应用场景的多样化和任务复杂性的增加,多无人机协同任务规划的重要性日益凸显。
研究者们在多个方面进行了深入探索与研究。
1. 任务分配与路径规划在多无人机协同任务中,任务分配与路径规划是最基础的环节之一。
通过合理的任务分配,可以充分利用多个无人机的能力,提高任务完成效率。
同时,路径规划的合理性与有效性直接影响到协同任务的完成能力。
研究者们提出了各种算法来解决分配问题,如贪心算法、遗传算法、蚁群算法等,并基于这些算法设计了一些路径规划策略。
2. 通信与合作多无人机之间的通信与合作是协同任务规划的关键问题之一。
通信机制的设计不仅要能够满足实时性和可靠性的要求,还要考虑到无人机之间的协作性。
研究者们发展了各种通信协议和合作机制,如基于无线网络的通信方案、通过局部信息共享的合作策略等,以实现无人机之间的信息交流和任务合作。
3. 算法与优化多无人机协同任务规划中的算法与优化问题十分关键。
研究者们通过对任务特性与约束条件建模,设计了多种算法来解决任务规划中的复杂问题。
优化算法包括整数规划、混合整数规划、线性规划等,用于对任务进行优化分配和资源利用。
二、多无人机协同任务规划的实现方案多无人机协同任务规划的实现需要综合考虑无人机平台、传感器、算法和通信等多个方面的因素。
1. 硬件平台无人机协同任务规划的实现需要选择适合的无人机硬件平台。
现有的无人机平台多样化,包括四旋翼、六旋翼、垂直起降飞机等。
根据实际需求选择合适的无人机平台,以满足任务的要求。
2. 传感器与感知无人机协同任务规划需要通过传感器获取周围环境信息以及其他无人机的状态信息。
无人机群协同任务规划优化研究无人机技术的快速发展和普及,使得无人机群已经成为了很多领域的重要应用方式。
一方面,无人机群在增加了作业的安全性和效率方面带来了重要的作用。
另一方面,无人机群还能够在很多需要迅速反应和高效协调的场景下,扮演重要角色。
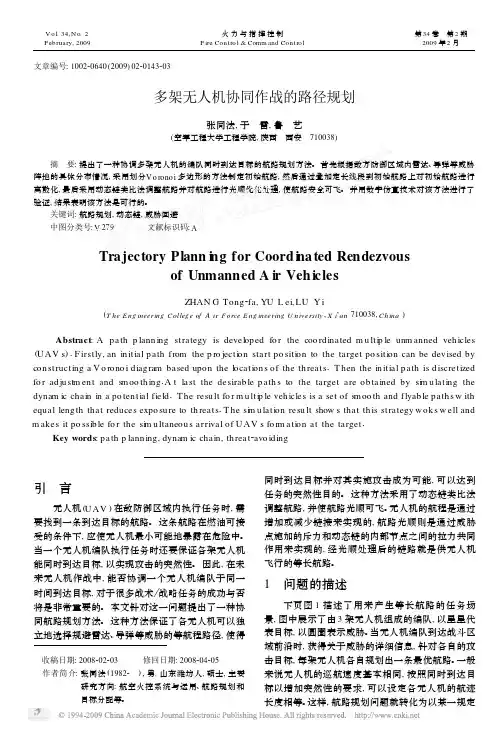
无人机群协同任务规划优化研究,正是针对无人机群协同作业的需要去设计更加高效的任务规划方案。
一、无人机群协同任务规划的研究背景随着无人机技术的不断提高,导致无人机的技术特性也得到了明显的增强。
从一开始的简单无人机到现在的飞行,机器视觉,自主导航等多种技术向无人机的发展呈现出了步入了快速发展时期的趋势。
相比之前的单机无人机,无人机群作业更注重的是高效性和安全性的双重优化。
如何让每个无人机能够最大化发挥自己的优势,协同完成一个任务,这是无人机群协同任务规划优化研究所要解决的问题。
二、无人机群协同任务规划的相关研究(1)无人机群协同任务规划的意义在大量的实践中,我们发现如果让单一的无人机去执行一个大型任务,效率虽然可以达到一定程度,但是如果出现了突发情况,无人机很难迅速响应,也就导致了任务不会及时结束。
同时,如果能够增加无人机群的数量,那么在一定程度上就会增加作业的快速反应能力和高度协调性。
无人机群协同任务规划,也就是针对上面所提及的问题所提出的解决方案。
(2)任务分配模型不同的无人机任务,在难度和工作量等方面都存在着不同程度的差异。
因此,在进行规划的时候,可能会出现任务分配不合理的情况,导致交通堵塞或是完成程度不够。
因此,任务分配模型是无人机群协同任务规划的关键性环节。
分配模型可包括机器学习模型,遗传算法模型等。
(3)路径规划模型和任务分配模型一样,路径规划模型也是无人机群协同任务规划的关键性环节。
因为无人机的数量较多,因此在执行任务时,无人机是必须要沟通协调才能避免出现相撞的情况,从而达到更加高效的目的。
(4)任务代价模型在进行任务代价模型分析时,我们应该从任务执行时间、能耗、费用、精度等多方面考虑。
分布式无人机系统的任务协同与路径规划研究摘要:随着无人机技术的飞速发展,分布式无人机系统在各个领域的应用越来越广泛。
在实际应用中,无人机系统需要完成复杂的任务,并在多个无人机之间进行任务协同和路径规划。
本文主要探讨了分布式无人机系统的任务协同和路径规划的研究现状和关键技术,主要包括任务协同的方法和算法、路径规划的理论和实践,以及未来的发展趋势。
1.引言随着无人机技术的快速发展和应用需求的增加,分布式无人机系统已成为无人机领域研究的热点之一。
分布式无人机系统通过多个无人机之间的协同合作,可以完成更加复杂的任务,如搜索救援、灾害监测等。
任务协同和路径规划是分布式无人机系统中的关键问题,直接影响到系统的性能和效率。
2.任务协同的方法和算法2.1 任务分配算法任务分配算法是分布式无人机系统实现任务协同的重要手段。
目标是将任务合理地分配给各个无人机,在满足任务需求的前提下最大限度地提高任务执行的效率。
常见的任务分配算法有拍卖算法、遗传算法和局部搜索算法等。
拍卖算法通过竞拍的形式将任务分配给无人机,根据无人机的能力和成本确定最佳的任务分配结果。
遗传算法利用进化的思想,通过自然选择、交叉和变异等操作来寻找最优的任务分配方案。
局部搜索算法基于贪心法则搜索任务分配的局部最优解。
以上方法各有优劣,需要根据具体任务和系统性能需求来选择合适的算法。
2.2 信息共享与通信任务协同需要无人机之间进行信息共享与通信。
共享的信息包括任务需求、位置信息、传感器数据等。
合理的信息共享与通信机制可以提高系统的实时性和协同效果。
常见的信息共享与通信方法有基于中心节点的通信和基于多跳的分布式通信。
基于中心节点的通信方式利用一个中心节点来接收和分发信息,优点是通信简单、可靠性高。
而基于多跳的分布式通信方式则直接将信息传递给周围的无人机,无需中心节点,优点是通信开销小、可扩展性好。
因此,在任务协同中选择合适的信息共享与通信方式非常重要。
3.路径规划的理论和实践3.1 路径规划的问题描述路径规划是指在给定起点和终点的情况下,确定无人机的最优飞行路径。
无人机控制系统的协同与路径规划技术分析与优化无人机技术的快速发展使得其在军事、民用等领域中得到了广泛应用。
而无人机的控制系统是其关键技术之一,其中协同与路径规划技术更是无人机操作中不可或缺的一部分。
本文将分析无人机控制系统的协同与路径规划技术,并探讨如何优化这些技术以提升无人机的性能和效率。
协同技术是指多架无人机之间的合作与协调。
在无人机控制系统中,协同技术可以使得多架无人机能够以一种智能化的方式进行协作,在任务执行中更快、更准确地完成所需的操作。
协同技术主要包括通信机制、信息共享与任务分配等方面。
首先,无人机之间的通信机制是协同技术的基础。
在无人机控制系统中,无人机之间需要实时地交换信息,以便相互感知彼此的位置、速度、状态等关键信息。
因此,建立可靠、高效的通信网络变得至关重要。
现代无人机系统通常采用无线通信技术,如Wi-Fi、蓝牙、LTE 等,以实现无人机之间的数据传输。
此外,为了确保通信安全,还可以采用加密技术来保护通信内容不被窃取或篡改。
其次,信息共享是协同技术的重要组成部分。
各架无人机需要共享它们所收集到的数据和信息,以便对任务执行环境进行全局感知和决策。
信息共享可以通过集中式或分布式的方式实现。
在集中式信息共享中,一架无人机充当信息中心,收集和处理其他无人机的数据,并将结果发送给各个无人机;而在分布式信息共享中,各个无人机之间直接共享数据,没有中心节点的存在。
分布式信息共享可以减少单点故障的风险,增加系统的可靠性。
最后,任务分配是协同技术的关键环节。
在无人机控制系统中,根据任务的要求和无人机的能力,需要将任务动态分配给多架无人机,以实现任务的高效完成。
任务分配需要考虑各个无人机的实时状态和内部资源的利用情况。
为了使任务分配更加智能化,可以利用机器学习和优化算法来自动化地分配任务,以提高无人机系统的任务执行效率。
路径规划技术是无人机控制系统的另一个重要方面。
路径规划是指根据任务的要求和无人机所处的环境,确定无人机的飞行路径以达到任务目标。
基于多智能体的无人机协同任务分配与路径规划研究随着无人机技术的不断发展,越来越多的无人机应用到了实际场景中,其应用领域也不断扩大,多智能体系统的出现更是让无人机的应用空间更加广泛。
在某些任务中,需要多个无人机协同完成,如搜索救援、海上巡逻、边境监测等,这时,如何进行无人机的协同任务分配和路径规划问题就成了关键。
因此,本文将围绕着如何基于多智能体进行无人机协同任务分配以及路径规划进行探讨。
第一部分:无人机协同任务分配对于无人机协同任务分配问题,常见的方法包括基于市场的方法和中心化的方法。
市场方法包括竞价和拍卖等,中心化方法主要是指集中式决策方法,如体系协同调度系统(STC)等。
但是这些方法在分配策略的效率、决策的可信度以及适用范围等方面存在许多问题。
基于多智能体的无人机协同任务分配优点和举例与市场方法和中心化方法不同,基于多智能体的方法将无人机视为智能体,通过智能体之间的协同来进行任务分配,因而具有以下优点:首先,多智能体的方法不存在单点故障,因为每个无人机都可独立思考和执行,这使得系统具有高可靠性和灵活性。
其次,无人机协同任务分配能够充分利用每个无人机的特点,将每个无人机的特长充分挖掘出来,以更优质的方式完成任务。
最后,多智能体的方法能够快速响应环境变化,同时,也提高了系统的灵活性与自适应性,因为只有在环境变化时才需要重新分配任务。
另外,基于多智能体的方法的应用场景也非常广泛,例如,在军事领域中,多智能体的方式使得无人机在协同作战时能够更快速地实现任务分配;在智慧城市建设中,智能无人机可以通过多智能体的方式实现交通监测、环境监测、应急救援等工作,提高城市的安全性和效率。
基于多智能体的无人机协同任务分配方法和实现技术基于多智能体的无人机协同任务分配,一般是通过目标函数和分布式控制算法来实现的。
目标函数是用来衡量无人机分配策略的优劣,分布式控制算法是用来协调各个智能体之间的行动,使得目标函数能在协商、协作、交流和沟通的过程中达到最优化。
多架无人机协同航迹规划研究综述A Survey of Cooperative Path Planning for Multi-UA Vs供稿|侯捷1,李博威2,念诚1,周浩1,赵越飞3 / HOU Jie1, LI Bo-wei2, NIAN Cheng1, ZHOU Hao1, ZHAO Yue-fei3 DOI: 10.3969/j.issn.1000–6826.2019.02.006无人驾驶飞机简称“无人机”,英文名称为“Unmanned Aerial Vehicle”(简称“UAV”)。
美国航空航天学会(The American Institute of Aeronautics and Astronautics,简称AIAA)对无人机定义为:一种设计或改装过的,不搭载飞行员,依靠飞行控制器进行控制,或者在没有飞行控制器参与的前提下,依靠机载自动飞行驾驶系统进行控制的飞行器。
随着飞行器技术的不断成熟,飞行任务的难度、危险度和强度不断加大,对飞行员综合素质的要求越来越高,任务的完成也越来越困难。
解决这一问题的一种有效途径就是采用无人机航迹规划技术[1]。
无人机航迹规划就是在满足无人机各种约束条件的情况下,为无人机规划一条从起点到终点的飞行轨迹,使其综合飞行代价最小。
多架无人机协同航迹规划是在满足无人机航迹规划定义的基础上,规划出满足多机协同关系的多条飞行轨迹,并使整个飞行系统代价最小。
研究背景随着信息技术的发展,现代战争也趋于高技术化、信息化,多角度全方位的特点逐渐凸显。
在这种情况下,无人机由于其灵活、轻便、隐蔽性强等特点在战争中发挥出越来越大的作用[2]。
随着社会的发展,具有得天独厚优势的无人机也逐渐走进人民的日常生活中,并得到民众的迅速认可。
赋予无人机的任务一般是多重且复杂的[3],在作者单位:1. 北京科技大学自动化学院,北京 100083;2. 北京交通大学附属中学,北京 100081;3. 北京沃利帕森工程技术有限公司,北京 100012科技前沿Advances in Science 无人飞机实际应用中,单架无人机很多时候无法满足任务要求。
多无人机协同规划控制的关键技术研究共3篇多无人机协同规划控制的关键技术研究1多无人机协同规划控制的关键技术研究随着无人机技术的发展,越来越多的无人机开始被用于各种领域的应用中,这些无人机之间的协同工作变得越来越重要和必要。
多无人机协同规划控制就是无人机群体中的多个无人机通过协同工作实现一定目标的过程。
本文将探讨多无人机协同规划控制的关键技术以及在未来的应用前景。
一、多无人机协同规划控制的意义多无人机协同规划控制可以有效地提升无人机的应用效率和工作能力。
例如像消防等紧急救援任务中,可以通过多无人机协同来完成大面积地区的检测和救援工作。
在军事中也可以通过多无人机协同来收集目标信息,执行搜索和打击任务等。
而且,多无人机协同规划控制不仅可以提高无人机的工作效率,还可以大大减少成本,并降低工作中的安全风险。
二、多无人机协同规划控制的关键技术1. 任务规划无人机的任务规划是多无人机协同规划控制的关键技术之一。
在任务规划中,需要考虑到多无人机协同工作时的交互作用、协调和优化。
对于每一个任务,需要对每一只无人机进行分配,并确定其运动轨迹,以保证任务顺利完成。
因此,在任务规划的过程中,必须使用高效的算法和技术进行规划和路线的规划。
2. 通信技术在多无人机协同规划控制中,通信技术是实现多个无人机之间传递数据和消息的重要方式之一。
由于无人机之间的工作距离和任务特点的不同,通信技术需要具有高度的可靠性和低延迟性,以确保无人机之间的数据传输的准确性。
3. 避障技术在实际的实践中,无人机之间存在着冲突和避障问题。
因此,无人机避障技术是多无人机协同规划控制的另一个关键技术。
避障技术能够帮助无人机在执行任务时尽可能的避免障碍物,避免碰撞和损坏。
同时,避障技术也能帮助无人机优化路径规划,减少无人机之间的冲突和协作决策的复杂度。
4. 决策和控制决策和控制是多无人机协同规划控制的核心技术,能够帮助无人机在复杂的环境中进行正确的决策和操作。
无人飞行器系统的协同控制与路径规划近年来,无人飞行器系统在各个领域得到了广泛的应用。
为了实现更高效安全的应用,无人飞行器系统的协同控制和路径规划成为了研究的热点。
本文将对无人飞行器系统的协同控制和路径规划进行分析,探讨其研究现状和未来发展方向。
一、无人飞行器系统的协同控制无人飞行器系统包括若干个无人飞行器,它们之间需要进行协同控制,以实现整体效益最大化。
目前,无人飞行器系统的协同控制主要采用分布式控制策略,即将整体控制任务分配给各个单元,单元之间进行信息交互,实现联合控制。
分布式控制策略可以降低传感器故障对系统的影响,增加系统的鲁棒性。
无人飞行器系统的协同控制需要考虑到多个因素,包括无人飞行器之间的通信,控制策略的设计和执行,以及状态变量的维护和传输等。
其中,控制策略的设计是关键,它需要考虑到系统的模型、运动学和动力学特性,以及机载传感器的数据获取和处理。
现有的控制策略主要包括基于分布式优化的协同控制策略和基于去中心化控制的协同控制策略。
前者采用全局优化方法,将整体控制任务分解为各个单元的局部控制任务,然后交由各个单元分布式地求解。
后者则采用本地信息的协同控制,各个单元之间进行信息交互和共享,实现整体控制。
二、无人飞行器系统的路径规划无人飞行器系统的路径规划是指对多个无人飞行器的运动轨迹进行规划,以达到最佳的整体性能。
路径规划需要考虑到多个因素,包括无人飞行器之间的碰撞避免、飞行器的动力学约束、不确定环境下的路径规划等。
一般来说,路径规划可分为全局路径规划和局部路径规划两个阶段。
全局路径规划通常采用启发式算法或最优化算法,例如A*算法、Dijkstra算法、遗传算法等,以求解最短路径或最优路径。
相比之下,局部路径规划更加注重避障和规避动态障碍物。
目前,局部路径规划主要采用基于模型预测控制的方法,预测机器人和障碍物的轨迹,然后避开障碍物,实现规划路径。
三、前沿研究和未来发展无人飞行器系统的协同控制和路径规划是一个复杂的系统工程,需要考虑到多个因素的交互作用。
无人机协同控制与路径规划研究一、引言无人机技术作为近年来最受关注的领域之一,正在逐渐应用于军事、民航、航天、测绘等多个领域。
在无人机系统中,协同控制和路径规划是关键技术,能够实现多架无人机的协同工作和高效执行任务,提高工作效率和任务完成能力。
二、协同控制协同控制是指多架无人机同时工作时,通过相互通信和合作进行任务分配、信息共享和协同工作的过程。
协同控制涉及到多个方面的内容,包括无人机之间的通信、定位、障碍物避让、任务分配等。
1. 通信技术为了实现无人机之间的通信,需要使用可靠的通信技术。
目前常用的通信技术包括Wi-Fi、蓝牙、RFID等。
其中,Wi-Fi技术具有较长的传输距离和高速率,能够满足无人机之间的数据传输需求。
2. 定位技术无人机的准确定位是实现协同工作的基础。
目前常用的定位技术包括全球定位系统(GPS)、惯性导航系统(INS)和视觉定位系统。
其中,GPS技术具有较高的精度和可靠性,适用于大部分无人机的定位需求。
3. 障碍物避让在无人机的协同工作中,障碍物避让是十分重要的一环。
通过使用传感器获取周围环境信息,运用避障算法,可以及时发现并规避飞行路径上的障碍物,确保无人机的安全飞行。
4. 任务分配多架无人机之间的任务分配需要通过合适的算法实现。
常用的任务分配算法包括集中式分配算法、分布式分配算法、多机器人协同决策算法等。
这些算法可以根据具体的任务需求和任务类型进行选取。
三、路径规划路径规划是指无人机在执行任务时,根据任务需求和环境条件,选择最佳路径的过程。
路径规划涉及到环境感知、路径生成和路径优化等方面。
1. 环境感知无人机的环境感知是基于传感器获取周围环境的信息,包括地形、障碍物、飞行限制等。
通过获取准确的环境信息,可以为无人机的路径规划提供准确的支持。
2. 路径生成路径生成是根据任务需求和环境条件生成最佳路径的过程。
常用的路径生成算法包括A*算法、Dijkstra算法和遗传算法等。
这些算法可以根据具体的任务需求,在考虑时间效率和航程最短性的基础上,生成最佳路径。