基于区域增长的点云分割方法
- 格式:docx
- 大小:11.31 KB
- 文档页数:3
点云分割方法
点云分割是一种将三维点云数据分成若干个较小部分的技术,以便于更好地理解数据和提取特征。
以下是几种常见的点云分割方法:
1. 基于区域增长的分割:该方法从一个种子点开始,逐步将相邻的点加入到分割区域中,直到没有更多的相邻点可以加入。
这种方法需要确定起始种子点和增长的停止条件,可能受到噪声和数据密度的影响。
2. 基于曲面的分割:该方法通过拟合一个曲面来将点云分割成不同的部分。
通常使用最小二乘法或其他优化算法来拟合曲面,然后根据曲面将点云分成不同的部分。
这种方法对于具有明显表面结构的点云数据非常有效。
3. 基于密度的分割:该方法根据点的密度将点云分成不同的部分。
密度较高的区域被视为一个整体,密度较低的区域则被排除在外。
这种方法可能需要确定密度阈值和聚类算法。
4. 基于移动最小二乘法(MLS)的分割:该方法通过拟合一个局部逼近曲面来将点云分成不同的部分。
该曲面是通过移动最小二乘法得到的,可以根据需要调整曲面的平滑度和局部逼近精度。
5. 基于神经网络的分割:近年来,基于神经网络的分割方法成为了研究的
热点。
这些方法使用深度学习技术来自动学习和识别点云的分割模式。
常见的网络结构包括卷积神经网络(CNN)和循环神经网络(RNN)。
以上是几种常见的点云分割方法,每种方法都有其优点和适用范围。
在实际应用中,可以根据具体需求选择适合的分割方法。
点云常⽤分割⽅法点云分割 点云分割可谓点云处理的精髓,也是三维图像相对⼆维图像最⼤优势的体现。
点云分割的⽬的是提取点云中的不同物体,从⽽实现分⽽治之,突出重点,单独处理的⽬的。
⽽在现实点云数据中,往往对场景中的物体有⼀定先验知识。
⽐如:桌⾯墙⾯多半是⼤平⾯,桌上的罐⼦应该是圆柱体,长⽅体的盒⼦可能是⽜奶盒......对于复杂场景中的物体,其⼏何外形可以归结于简单的⼏何形状。
这为分割带来了巨⼤的便利,因为简单⼏何形状是可以⽤⽅程来描述的,或者说,可以⽤有限的参数来描述复杂的物体。
⽽⽅程则代表的物体的拓扑抽象。
于是,RanSaC算法可以很好的将此类物体分割出来。
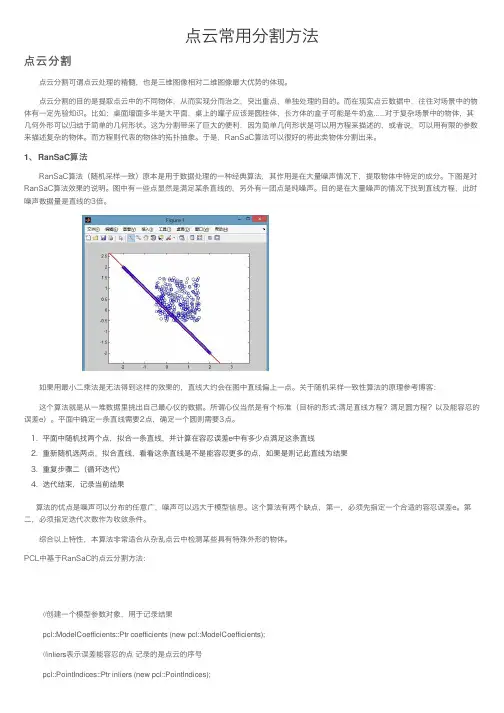
1、RanSaC算法 RanSaC算法(随机采样⼀致)原本是⽤于数据处理的⼀种经典算法,其作⽤是在⼤量噪声情况下,提取物体中特定的成分。
下图是对RanSaC算法效果的说明。
图中有⼀些点显然是满⾜某条直线的,另外有⼀团点是纯噪声。
⽬的是在⼤量噪声的情况下找到直线⽅程,此时噪声数据量是直线的3倍。
如果⽤最⼩⼆乘法是⽆法得到这样的效果的,直线⼤约会在图中直线偏上⼀点。
关于随机采样⼀致性算法的原理参考博客: 这个算法就是从⼀堆数据⾥挑出⾃⼰最⼼仪的数据。
所谓⼼仪当然是有个标准(⽬标的形式:满⾜直线⽅程?满⾜圆⽅程?以及能容忍的误差e)。
平⾯中确定⼀条直线需要2点,确定⼀个圆则需要3点。
1. 平⾯中随机找两个点,拟合⼀条直线,并计算在容忍误差e中有多少点满⾜这条直线2. 重新随机选两点,拟合直线,看看这条直线是不是能容忍更多的点,如果是则记此直线为结果3. 重复步骤⼆(循环迭代)4. 迭代结束,记录当前结果算法的优点是噪声可以分布的任意⼴,噪声可以远⼤于模型信息。
这个算法有两个缺点,第⼀,必须先指定⼀个合适的容忍误差e。
第⼆,必须指定迭代次数作为收敛条件。
综合以上特性,本算法⾮常适合从杂乱点云中检测某些具有特殊外形的物体。
PCL中基于RanSaC的点云分割⽅法:1. //创建⼀个模型参数对象,⽤于记录结果2. pcl::ModelCoefficients::Ptr coefficients (new pcl::ModelCoefficients);3. //inliers表⽰误差能容忍的点记录的是点云的序号4. pcl::PointIndices::Ptr inliers (new pcl::PointIndices);5. // 创建⼀个分割器6. pcl::SACSegmentation<pcl::PointXYZ> seg;7. // Optional8. seg.setOptimizeCoefficients (true);9. // Mandatory-设置⽬标⼏何形状0. seg.setModelType (pcl::SACMODEL_PLANE);1. //分割⽅法:随机采样法2. seg.setMethodType (pcl::SAC_RANSAC);3. //设置误差容忍范围4. seg.setDistanceThreshold (0.01);5. //输⼊点云6. seg.setInputCloud (cloud);7. //分割点云8. seg.segment (*inliers, *coefficients);除了平⾯以外,PCL⼏乎⽀持所有的⼏何形状。
基于区域增长算法的三维模型分割技术研究在城市规划与建筑设计中,三维模型被广泛应用于可视化分析、仿真演示等方面。
然而,对于大规模的三维模型,要进行有效的分割,以达到更好的可视化效果,是一项复杂且困难的任务。
而区域增长算法作为一种常用的三维模型分割技术,正逐渐成为研究的热点。
一、区域增长算法区域增长算法是一种基于像素或者像素点云的分割方法,它依赖于一个种子点或者种子区域开始,以相邻像素或者像素点云的相似性为依据,逐渐将相似的像素或点归为同一个区域,直到整个图像或点云被完全分割出为止。
区域增长算法主要包括两个步骤:种子点的选择和区域增长过程。
种子点的选择通常由人工进行,灵活性高,但耗时耗力,不能适用于大规模的三维模型分割。
因此,研究者们提出了基于自适应方式的种子点选择算法,例如基于曲率、法线向量等,以自动化的方式选择种子点。
区域增长过程主要利用像素或点相似性判定是否属于同一区域。
常见的相似性判定方法包括颜色、灰度值、几何特征等,也可以综合多种相似性判定方法进行分割。
二、区域增长算法在三维模型分割中的应用区域增长算法在三维模型分割中应用十分广泛。
例如,基于点云的区域增长算法可以用于进行建筑物立面分割,将建筑物墙面、窗户、门等部位分割出来,以达到更好的可视化效果。
基于网格的区域增长算法也可以应用于建筑物分割,例如将轮廓线比较明显的建筑物分割出来,以便于进行仿真演示和设计优化。
此外,区域增长算法还可以用于对生物模型进行分割,例如分割出动物的不同器官和组织,以便于进行研究和治疗。
三、区域增长算法的优缺点区域增长算法具有以下优点:1. 可以自动对大规模三维模型进行分割,减轻了人工干预的负担。
2. 灵活性高,可以根据不同需要选择不同的相似度判定方法。
3. 分割结果可以被自然地表示为区域。
然而,区域增长算法也存在一些不足:1. 对于不规则形状或存在遮挡的物体,分割结果可能不准确。
2. 对于平面分割或曲面分割,需要比较复杂的算法,增加了计算量和算法复杂度。
PCL(Point Cloud Library)中常用的点云分割方法有:1. Planar model segmentation(平面模型分割):该算法能够把地面等一些平面给分割出来,方便后面的物体的点云分割。
2. Cylinder model segmentation(圆柱模型分割):该算法能够把一些圆柱体分割出来,方便后面的物体的点云分割。
3. Euclidean Cluster Extraction(欧几里德聚类提取):通俗来讲就是先从点云中找出一个点p0,然后寻找p0周围最近的n个点,如果这n个点与p0之间的距离小于预先设定的阈值,那么就把这个点取出,依次重复。
4. Region growing segmentation(区域蔓延分割):对于普通点云,其可由法线、曲率估计算法获得其法线和曲率值。
通过法线和曲率来判断某点是否属于该类,向周边蔓延直至完成。
5. pcl::RegionGrowing:使用了一种基于区域增长的方法来分割点云数据,该算法使用一种增长策略,将种子点作为开始点,不断将邻近点添加到同一个区域中。
6. pcl::RegionGrowingRGB:基于RGB颜色信息进行区域生长分割的模块,它基于局部颜色相似性度量邻域内点之间的相似性,并在此基础上将相似的点合并成一个聚类。
7. pcl::SACSegmentation:用于估计点云中符合特定模型的参数以及对应的点集。
它支持对于多种基础的模型进行拟合,如平面、球、圆柱、圆锥等。
SACSegmentation采用随机抽样一致性(RANSAC)算法来实现,可以在噪声点云数据中快速鲁棒地估计模型参数。
以上信息仅供参考,如需了解更多信息,请查阅PCL官方文档或咨询专业人士。
点云分割的五种方法点云分割是计算机视觉领域中的一个重要任务,它旨在将三维点云数据分割成不同的部分或物体。
点云分割在许多领域中都有广泛的应用,比如自动驾驶、机器人导航和三维重建等。
下面将介绍五种常见的点云分割方法。
第一种方法是基于几何特征的点云分割。
这种方法利用点云的几何特征,比如法向量、曲率等信息来进行分割。
通过计算点云中每个点的几何特征,并根据这些特征将点云分成不同的部分。
这种方法简单直观,但对于复杂的点云数据可能不够准确。
第二种方法是基于颜色的点云分割。
这种方法利用点云中每个点的颜色信息来进行分割。
通过计算点云中每个点的颜色特征,并根据这些特征将点云分成不同的部分。
这种方法适用于具有明显颜色差异的点云数据,比如彩色点云。
第三种方法是基于深度学习的点云分割。
这种方法利用深度学习模型,如卷积神经网络(CNN)或自编码器(AE),对点云进行学习和分割。
通过输入大量的标记点云数据训练深度学习模型,然后使用该模型对未标记点云数据进行分割。
这种方法在准确性方面表现出色,但需要大量的标记数据和计算资源。
第四种方法是基于区域生长的点云分割。
这种方法从一个种子点开始,逐渐将与该种子点相邻的点加入到同一个区域中,直到达到预设的条件为止。
这种方法适用于具有连续性的点云数据,比如平面或曲面。
第五种方法是基于图论的点云分割。
这种方法将点云看作一个图,其中每个点表示一个节点,点之间的连接表示它们之间的关系。
通过在该图上进行图论算法,如最小生成树或最大流最小割,将点云分成不同的部分。
这种方法可以有效地处理点云数据的连通性和噪声问题。
点云分割是计算机视觉中的一个重要任务,有许多不同的方法可以实现。
每种方法都有其优缺点,适用于不同类型的点云数据。
在实际应用中,需要根据具体问题的要求选择合适的方法。
随着计算机视觉和深度学习的发展,点云分割的方法将会不断进步和改进,为更广泛的应用场景提供更好的解决方案。
点云表面分割几何算法是处理3D点云数据的重要技术之一,其目标是将点云数据分割成多个连续的、几何形状简单的部分。
以下是一些常用的点云表面分割几何算法:
1. 基于表面拟合的分割:这种方法通过拟合一个或多个曲面来分割点云数据。
首先,它会在点云数据中寻找出曲率变化较大的区域作为分割边界,然后将这些边界内的点云数据分别拟合出不同的曲面,从而实现分割。
2. 基于体素网格的分割:这种方法将点云数据映射到一个规则的体素网格上,然后根据体素网格中的值来进行分割。
具体来说,它会将点云数据中的每个点都映射到一个体素网格中的单元格上,然后将每个单元格中的点云数据归为一个聚类,最后根据聚类的结果来分割点云数据。
3. 基于区域增长的分割:这种方法会从点云数据中的某个点开始,不断扩展周围点的范围,形成一个连续的区域,直到达到预设的分割条件为止。
具体来说,它会根据点的密度、曲率等特征来选择扩展的方向和范围,从而得到不同的分割区域。
4. 基于水平集的分割:这种方法将点云数据看作是二维流场中的一个曲面,然后通过演化曲面来得到分割结果。
具体来说,它会根据曲面的高程、方向等特征来计算演化速度和方向,从而得到不同高度的分割区域。
这些算法各有优缺点,选择合适的算法需要根据具体的应用场景和需求来决定。
^m m m m2021年第04期(总第220期)结合平面模型与区域增长的矿石点云分割王鹏,邓彬,李柏阳(湖北工业大学电气与电子工程学院,湖北武汉430068)摘要:为了解决传统固定式破碎机在矿山井下利用石块三维信息来实现自动碎石的过程中出现的石块点云过拟合成平 面,造成石块三维信息缺失的情况。
文章提出了基于背景模型的方法获取石块的三维信息。
利用破碎区域石块背景的 不变性,将获取的石块点云与背景比较并过滤掉背景部分,最后利用区域增长算法对石块点云分割。
实验结果表明,相 比于基于平面模型与区域增长法,改进后的分割方法效果与鲁棒性更高。
关键词:TOF ;三维点云;点云滤波;区域增长;点云分割中图分类号:TP 391 文献标识码:B 文章编号=2096-9759(2021)04-0038-04Segmentation of ore point cloud combining plane model and area growthWang Peng,Deng Bin, LiBoyang(Hubei U niversity o f Technology School o f Electrical and Engineering ,Wuhan ,430068,China )Abstact: In order to solve the problem that the traditional fixed crusher uses the three-dimensional inform ation o f the stone inthe underground mine to realize the automatic crushing o f the stone , the point cloud o f the stone appears to be over-fitted to the plane , w hich causes the lack o f three-dimensional inform ation o f t he stone . This paper proposes a method based on background model to obtain 3D inform ation o f rocks . Using the invariance o f the stone background in the broken area , the obtained stone point cloud is compared w ith the background and the background part is filtered out , and fin a lly the area growth algorithm is used to segment the stone point cloud . The experimental results show that the improved segmentation method is more effective and robust compared to the plane model and region growing method .Keywords :TOF ; 3D point cloud ; point cloud flltering;regional growth ; Point cloud segmentation随着工业自动化[1]的发展,无人操作化的趋势更加明显。
点云单木分割区域生长算法全文共四篇示例,供读者参考第一篇示例:点云单木分割是数字林业学中的一个重要研究领域,它通过处理激光扫描获取的点云数据,实现将林地中的各个个体树木进行分割和识别。
区域生长算法是点云处理中的一种常用算法,它基于相邻点之间的相似性和连续性,对点云数据进行区域分割和生长,实现对单木进行分割的目的。
本文将介绍点云单木分割的背景及意义,重点介绍区域生长算法的原理和实现方法。
一、点云单木分割的背景及意义随着数字林业学的发展,利用激光扫描技术获取林地信息已经成为一种重要的手段。
激光扫描技术能够高效地获取林木结构的三维信息,为林地资源管理和保护提供了有效的数据支持。
激光扫描获取的点云数据通常包含大量的信息,其中包含了不同个体树木的信息,如何对这些点云数据进行单木分割成为研究的热点问题。
点云单木分割的目的是将点云数据中的林木进行有效地分割,实现对单木的识别和建模。
这对于林地资源管理和保护具有重要的意义,可以帮助林业人员对林地结构和环境进行详细的分析和评估,为合理的资源利用和保护提供科学依据。
二、区域生长算法的原理区域生长算法是一种基于种子生长的点云分割算法。
其主要思想是将种子点作为起始点,通过种子点与相邻点之间的相似性判断,不断地生长形成一个区域。
通过不断地将相邻点加入到区域中,从而实现对点云数据的区域分割和生长。
具体来说,区域生长算法的步骤如下:2. 生长:从候选点集合中选择一个点作为当前点,计算当前点与种子区域中所有点的相似性。
若当前点与种子区域中的某个点的相似性满足一定条件,则将当前点加入到种子区域中,并将当前点的相邻点加入到候选点集合中。
3. 终止条件:当候选点集合为空或者种子区域的大小达到预设的阈值时,终止生长。
4. 输出结果:得到一个经过区域生长处理的点云区域,即为一个单独的树木。
1. 相似性判断:区域生长的关键在于如何判断点与区域中的点的相似性。
通常可以使用点之间的欧式距离、法向量差异等指标来进行相似性判断,以确定是否将点加入到种子区域中。
点云分割的五种方法点云分割是计算机视觉和机器学习的一个重要任务,它的目标是将三维点云数据中的不同对象或部分进行分割和识别。
下面将介绍五种常见的点云分割方法。
1.基于几何特征的方法:这种方法基于点云数据的几何特征,例如点的法线、曲率、形状度量等,来进行分割。
常用的算法包括基于曲率阈值的方法、基于区域生长的方法和基于支持向量机的方法。
其中,基于曲率阈值的方法通过设定曲率阈值,将曲率高于该阈值的点作为边缘点进行分割;基于区域生长的方法则从一个种子点开始,通过逐渐添加周围点来构建一个连通的区域,直到达到预设的停止条件;而基于支持向量机的方法则通过训练一个二分类器来区分不同的点云区域。
2.基于深度学习的方法:近年来,深度学习在点云分割任务中取得了很大的成功。
这种方法利用深度神经网络来自动学习点云数据的特征表示和分割规则。
常见的方法有基于3D卷积神经网络(CNN)的方法和基于图卷积网络(GCN)的方法。
其中,3DCNN通过在点云上进行卷积操作来提取局部和全局特征,进而进行分割;GCN则通过在点云上构建图结构,利用图卷积操作来学习点云之间的依赖关系,得到更准确的分割结果。
3.基于形状特征的方法:这种方法通过提取点云数据的形状特征,例如球面谐波系数、形状描述子等,来进行分割。
常用的方法有基于球面谐波函数分析的方法和基于形状描述子的方法。
其中,球面谐波函数分析方法将点云数据投影到球面谐波函数空间,通过分析其系数来实现分割;形状描述子方法则通过描述点云数据的局部和全局几何性质来进行区域分割。
4.基于语义信息的方法:5.基于混合方法的方法:这种方法将上述不同的方法进行组合和融合,充分发挥它们的优势。
常见的方法有多尺度分割方法和多模态分割方法。
其中,多尺度分割方法通过在不同的尺度下对点云数据进行分割,然后将结果进行融合,得到更准确的分割结果;而多模态分割方法则将来自于不同传感器(例如相机和激光雷达)的点云数据进行融合,提高分割的鲁棒性和准确性。
点云区域生长聚类算法-概述说明以及解释1.引言1.1 概述概述部分的内容:点云是一种描述三维空间中物体形状和位置的数据结构,已广泛应用于计算机图形学、计算机视觉、机器人技术等领域。
随着3D扫描技术的发展,点云数据的获取变得更加容易和普遍,因此点云数据的处理和分析成为当前研究的重要课题之一。
点云区域生长聚类算法是一种基于邻域关系的聚类算法,可以自动将点云数据集划分为不同的区域或聚类。
该算法通过对点云数据中的每一个点进行生长操作,将具有相似特性的点连接在一起,形成一个个点云区域。
这种算法基于点与点之间的距离和相似性度量来确定是否将两个点合并为一个区域,从而实现点云的聚类。
本文旨在介绍点云区域生长聚类算法的原理和应用。
首先,我们将详细介绍点云技术的基本概念和相关背景知识,包括点云数据的获取方式和表示方法。
然后,我们将深入探讨点云区域生长算法的原理,包括邻域关系的定义、点的相似性度量和生长策略等。
接着,我们将通过实验结果的分析来评估该算法的性能,并总结其优缺点。
最后,我们将对未来点云区域生长聚类算法的研究方向进行展望。
通过本文的介绍,读者将能够全面了解点云区域生长聚类算法,并在实际应用中能够灵活运用。
同时,本文也为点云数据处理和分析领域的研究者提供了一个重要的参考和指导。
1.2文章结构1.2 文章结构本文将首先介绍点云技术的基本概念和应用背景,以便读者能够对点云区域生长聚类算法有一个清晰的认识。
接着,文章将详细讨论区域生长算法的原理,包括其基本思想、关键步骤和算法流程。
然后,我们将通过实验结果的分析,验证点云区域生长聚类算法在不同场景下的性能表现,并对其优点和局限性进行总结和讨论。
最后,我们将对整篇文章进行总结,并给出进一步研究的展望。
通过以上的结构安排,读者将能够全面了解点云区域生长聚类算法的原理和应用,以及其在实际场景中的表现。
同时,通过对算法的优缺点分析,读者可以对该算法的局限性和改进方向有一个清晰的认识。
第31卷ꎬ第4期国㊀土㊀资㊀源㊀遥㊀感Vol.31ꎬNo.4㊀2019年12月REMOTESENSINGFORLAND&RESOURCESDec.ꎬ2019㊀doi:10.6046/gtzyyg.2019.04.03引用格式:朱军桃ꎬ王雷ꎬ赵传ꎬ等.基于区域生长算法的复杂建筑物屋顶点云分割[J].国土资源遥感ꎬ2019ꎬ31(4):20-25.(ZhuJTꎬWangLꎬZhaoCꎬetal.Pointcloudsegmentationontheroofofcomplicatedbuildingbasedonthealgorithmofregiongrowing[J].RemoteSensingforLandandResourcesꎬ2019ꎬ31(4):20-25.)基于区域生长算法的复杂建筑物屋顶点云分割朱军桃1ꎬ2ꎬ王雷1ꎬ2ꎬ赵传3ꎬ郑旭东1ꎬ2(1.桂林理工大学测绘地理信息学院ꎬ桂林㊀541006ꎻ2.广西空间信息与测绘重点实验室ꎬ桂林㊀541006ꎻ3.信息工程大学地理空间信息学院ꎬ郑州㊀450001)摘要:精确分割建筑物屋顶激光雷达(lightdetectionandrangingꎬLiDAR)点云是三维模型重建的重要环节ꎮ针对现有算法分割复杂建筑物屋顶面结构精度差的问题ꎬ提出一种以三角面为基元的基于区域生长算法的复杂建筑物屋顶点云分割方法ꎮ首先ꎬ构建Delaunay三角网建立各激光点间相互关系ꎬ计算各三角面法向量ꎬ利用同一建筑物面片上各三角面法向量基本一致的特征对点云进行初步划分ꎻ然后ꎬ由于点云散乱性及误差影响产生诸多散乱三角面ꎬ对各构成散乱三角面的点进行剖分ꎬ并基于具有良好鲁棒性的随机采样一致性算法(randomsampleconsensusꎬRANSAC)ꎬ结合AlphaShape算法获取建筑物各面片边界ꎬ合并过度分割的面片及孤立点ꎬ完成建筑物屋顶点云分割ꎮ实验结果表明ꎬ该方法对复杂建筑物屋顶点云分割的完整性㊁正确性及质量均较为理想ꎮ关键词:LiDAR点云ꎻDelaunay三角网ꎻRANSAC算法ꎻAlphaShape算法中图法分类号:P237㊀文献标志码:A㊀㊀㊀文章编号:1001-070X(2019)04-0020-06收稿日期:2018-10-08ꎻ修订日期:2019-01-04基金项目:2019年广西研究生教育创新计划项目(编号:YCSW2019154)资助ꎮ第一作者:朱军桃(1968-)ꎬ男ꎬ教授ꎬ研究方向为工程测量与测绘数据处理ꎮEmail:glzjt@163.comꎮ通信作者:王雷(1994-)ꎬ男ꎬ硕士研究生ꎬ研究方向为点云数据处理ꎮEmail:794007279@qq.comꎮ0㊀引言随着机载激光雷达(lightdetectionandrangingꎬLiDAR)测量技术的不断突破ꎬ其应用前景广为人们关注ꎮ利用高密度的LiDAR数据构建3D城市模型相比于影像匹配更加容易ꎬ而对城市中的建筑物进行模型重建无疑需要对复杂的建筑物屋顶进行精细化分割ꎮ由于复杂建筑物的屋顶存在较多大小不一的面片ꎬ其点云分布散乱且存在噪声等问题ꎬ使现有算法在精确分割建筑物屋顶面时仍面临着严峻挑战ꎮ对建筑物屋顶点云进行分割方法主要包括3类:①基于模型匹配的算法ꎬ由于实际中建筑物往往包含多个顶面ꎬ随机采样一致性算法(randomsampleconsensusꎬRANSAC)[1-3]以迭代的方式从含有大量局外点中获得最优的模型参数从而受到广泛关注ꎬ但局外点所占比例往往需要以很高迭代次数才能获得最优模型参数ꎬ导致时间成本巨大ꎬ不利于对复杂建筑物的屋顶面点云分割ꎻ②基于特征聚类的算法[4-5]ꎬ此类方法通过采样点邻域计算出采样点微分几何属性ꎬ几何属性的估算受采样点邻域大小以及测量误差影响ꎬ同时其阈值敏感性高ꎬ若设置不当就会造成建筑物屋顶面分割效果不理想甚至分割失败ꎻ③基于区域生长算法[6-8]的算法ꎬ区域生长算法可简单描述为从某种子点开始ꎬ以种子点与邻域内点具有某种一致关系划分点集ꎬ其中以法向量及曲率划分方式居多ꎬ同特征聚类方法一样ꎬ由于单个激光点不存在矢量属性ꎬ往往以种子点邻域内激光点采用拟合或计算特征值等方式近似表达种子点的法向量或曲率信息等ꎬ而邻域的选取与测量误差会直接影响所表征点的矢量信息ꎬ种子点的生长过程中邻近点的搜索方式同样可能影响生长结果ꎬ此类问题导致了区域生长算法在分割建筑物屋顶点云时易产生错误分割ꎬ且各屋顶面交界处采样点难以准确分割ꎮ针对上述区域生长算法中存在激光点矢量信息需要通过邻域估算ꎬ生长过程中邻域点选取不当的问题ꎬ本文提出一种以三角面为基元的基于区域生长算法的复杂建筑物屋顶点云分割算法ꎮ通过构建Delaunay三角网的方式ꎬ将屋顶面点云划分至不规则三角网内ꎬ以区域生长算法划分各三角面ꎬ避免了第4期朱军桃ꎬ等:㊀基于区域生长算法的复杂建筑物屋顶点云分割各激光点逐点进行矢量估算和邻域点选取问题ꎻ然后合并各过度划分的面片集合及孤立点ꎬ完成对建筑物屋顶面点云的精确分割ꎮ1㊀研究方法1.1㊀面片划分对于没有任何拓扑信息的点云[9]ꎬDelaunay三角网以最邻近三点形成三角形ꎬ各三角形边互不相交的独有优势ꎬ无疑成为建立各激光点间关系的良好方式ꎮ本文通过构建Delaunay三角网ꎬ计算各三角面片单位法向量ꎬ并剔除边长过长与法向量异常的三角形ꎮ通过建筑物同一面片上各三角面法向量基本相同的特征ꎬ以任意三角面作为起始种子面ꎬ其单位法向量作为判断条件ꎬ种子面的共边三角面作为邻近面ꎬ计算与此三角面共边三角面单位法向量的夹角ꎬ设置角度阈值α作为生长条件ꎬ若夹角小于αꎬ则2个三角面属于同一面片集合ꎻ若大于αꎬ则停止此方向生长ꎮ采用此方式可避免逐点估算法向量与判断邻近关系ꎮ区域生长流程如图1所示ꎮ图1㊀三角面为基元的区域生长流程Fig.1㊀Flowchartforregiongrowingbasedontriangles㊀㊀最终同属相同屋顶面片内的三角面会被划分到同一面片集合中ꎮ但测量误差㊁点云散乱性分布等问题会造成诸多法向量异常的三角面ꎮ图2为一人字形屋顶ꎬ同一面片集合中出现了异常三角面ꎬ且在2个屋顶面交界处数量明显增加ꎮ为解决此类过度划分问题ꎬ需要对面片集合进行合并ꎮ(a)人字形屋顶点云(b)三角面集合图2㊀三角面区域生长结果Fig.2㊀Resultofregiongrowingoftriangles1.2㊀面片合并依据以三角面为基元的方式ꎬ可以部分解决屋顶交界处法向量分布散乱问题ꎮ2个屋顶面相交处三角面的3个激光点分别属于不同平面ꎬ由于激光点以相邻共边三角形为种子面的邻近面ꎬ孤立的三角面各边被不同面片集合所剖分ꎬ即将异常三角面上各点划分至不同面片集合ꎬ但仍存在未被划分的点与过度分割的面片集合ꎮ考虑到测量误差及生长角度阈值α所造成的影响ꎬ为更精确获得各面片平面方程ꎬ即Ax+By+Cz+D=0ꎬ(1)式中AꎬBꎬCꎬD为系数ꎮ采用RANSAC算法计算各面片集合的平面方程ꎮ因已经过初步划分的点云极少含有局外点ꎬ即少量的迭代次数就能得到最优平面方程ꎬ减少时间成本ꎮ在不考虑房屋附属的情况下ꎬ认为激光点数量越少的集合越有可能为过度分割的平面ꎬ其中具有较大误差点可能性越高ꎬ因此本文采取以下策略解决过度分割问题:1)边界获取ꎮ采用AlphaShape算法获得各集合非凸边缘ꎬ具体方法见文献[10]ꎮ12国㊀土㊀资㊀源㊀遥㊀感2019年2)孤立点合并ꎮ将构成平面最少激光点数小于3的点集作为孤立点处理ꎬ计算孤立点P到各Al ̄phaShape边缘距离ꎬ若P在AlphaShape边缘内ꎬ距离为0ꎻ若P至最近AlphaShape边缘距离小于阈值Бꎬ则计算点到平面距离Lꎬ即L=Ax+By+Cz+DA2+B2+C2ꎮ(2)设定阈值δꎬ若Lɤδꎬ则将P合并至此面片集合ꎬ并更新此集合AlphaShape边缘ꎻ若L>δꎬ则将P作为噪声点剔除ꎮ3)面片合并ꎮ统计各面片集合激光点数量ꎬ由大到小排列ꎬ并认为激光点数量最多的集合为标准平面ꎮ计算标准面至各AlphaShape边缘距离ꎬ若平面在AlphaShape边缘内ꎬ距离为0ꎻ若距离小于阈值Бꎬ则计算平面夹角ꎬ即㊀cosθ=A1A2+B1B2+C1C2A21+B21+C21A22+B22+C22ꎮ(3)对于平面夹角阈值ꎬ若设置太大ꎬ则容易造成某些夹角小的面片过度合并ꎻ若设置太小ꎬ则容易造成过度剖分的面片难以融合ꎮ因此本文依据点集数量对阈值进行改进ꎬ计算公式为ρr=Kρꎬ(4)K=1-NnNb㊀㊀(Kȡ0.2)ꎬ(5)式中:Nb为标准面片激光点数量ꎻNn为邻近面片激光点数量ꎻρ为平面夹角阈值初值ꎻρr为最终平面夹角阈值ꎮ式(5)依据各集合激光点数量ꎬ若数量与标准面片越接近则越可能为真实屋顶面ꎬ减小阈值有利于避免过度合并ꎻ相反ꎬ增大阈值有利于合并因激光点数量少而使噪声被放大的面片ꎻ但为了避免夹角阈值过小ꎬ设置Kȡ0.2ꎮ2㊀实验2.1㊀实验数据与参数本文实验数据来自国际摄影测量与遥感学会(InternationalSocietyforPhotogrammetryandRemoteSensingꎬISPRS)提供的德国Vaihingen地区的机载LiDAR点云ꎬ点云平均密度约4个/m2ꎬ并使用由Yang等[11]分类的建筑物点云数据ꎬ使用Cloud ̄Compare软件剔除分类错误的激光点ꎮ依据文献[4]ꎬ法向量角度阈值α选取范围一般为5ʎ~10ʎꎬ本文选取5ʎꎻ孤立点与平面到各AlphaShape边界距离阈值Б应大于点云平均距离ꎬ本文选取2倍点云平均距离ꎬ为1mꎻ为保证孤立点与面片正确合并ꎬ孤立点到各平面距离阈值δ选取应小于点云平均距离ꎬ本文取1/2点云平均距离ꎬ设置为0.25mꎻ2个平面夹角阈值ρ应大于αꎬ本文取10ʎꎮ2.2㊀算法对比通过对比RANSAC算法与区域生长算法分割的建筑物点云ꎬ定量评价本文方法对建筑点云的分割效果ꎮ(a)建筑物1影像(b)建筑物1(c)建筑物1(d)建筑物1本文方法分割结果RANSAC分割结果区域生长分割结果(e)建筑物2影像(f)建筑物2(g)建筑物2(h)建筑物2本文方法分割结果RANSAC分割结果区域生长分割结果图3-1㊀不同算法对建筑物分割效果对比Fig.3-1㊀Comparisonbetweendifferentalgorithmsonsegmentationofbuildings22第4期朱军桃ꎬ等:㊀基于区域生长算法的复杂建筑物屋顶点云分割(i)建筑物3影像(j)建筑物3(k)建筑物3(l)建筑物3本文方法分割结果RANSAC分割结果区域生长分割结果(m)建筑物4影像(n)建筑物4(o)建筑物4(p)建筑物4本文方法分割结果RANSAC分割结果区域生长分割结果图3-2㊀不同算法对建筑物分割效果对比Fig.3-2㊀Comparisonbetweendifferentalgorithmsonsegmentationofbuildings㊀㊀由图3可以看出ꎬRANSAC算法分割建筑物点云ꎬ仅追求数学上的一致性ꎬ导致平面过度分割ꎬ如图3(c)中框选区域ꎻ以区域生长算法分割建筑点云ꎬ在处理屋脊时处效果欠佳ꎻ而以本文方法所获得结果均避免了上述问题ꎮ但本文方法在图3(b)中框选处ꎬ将本应处于同一平面上的点簇划分成2个平面ꎻ由图3(c)和(d)可知ꎬRANSAC算法同样发生此问题ꎬ而区域生长算法在此处将大量屋顶面过度融合ꎮ在对建筑物2的划分中ꎬ图3(f)中各屋檐处存在狭窄平面ꎬ最终被划分为主屋顶面的一部分ꎮ由此发现ꎬ本文处理狭长区域时ꎬ由于三角面法向量敏感性ꎬ容易导致三角面的关联被异常面截断甚至难以构成三角面ꎬ导致狭长的点簇被划分为孤立点而被划分到其他屋顶面上ꎮ图3(k)框选处ꎬ存在较多误差较大的激光点ꎬRANSAC算法在此处分割出错误平面ꎻ图3(l)中此处错分现象更为严重ꎻ而图3(j)采用本文方法未受到误差较大的激光点干扰ꎬ正确分割了此平面ꎬ说明本文方法较RNASAC算法与区域生长算法的抗噪能力更强ꎮ为更加准确地评价本文方法精度ꎬ采取文献[12]的评价准则分别对本文方法㊁RANSAC算法与区域生长算法的分割完整率C㊁正确率A及分割质量Q进行评估ꎮ计算公式分别为C=TP/(TP+FN)ꎬ(6)A=TP/(TP+FP)ꎬ(7)Q=TP/(TP+FN+FP)ꎬ(8)式中:TP为正确分割激光点数量ꎻFN为漏提激光点数量ꎻFP为错误分割激光点数量ꎮ表1和表2分别为各算法的精度对比和建筑物屋顶面分割数量对比ꎮ由表1可知ꎬ采用本文方法对建筑物1ꎬ3ꎬ4的分割完整率㊁正确率及提取质量均在不同程度上优于RANSAC算法及区域生长算法分割方法ꎬ其中对建筑物的分割完整率明显高于后者ꎬ由此发现采取本文分割方法有较好的抗噪能力ꎮ但建筑物2中所表现的数据ꎬ采取本文方法分割效果较差于RANSAC算法ꎬ原因是其所含狭长屋顶面较多ꎬ最终导致过多的错误分割ꎮ由表2可见ꎬ对建筑物4的3种方法分割结果相差无几ꎬ随着建筑物顶面数量增加ꎬ本文分割方法逐渐优于RNA ̄SAC算法与区域生长算法ꎬ但本文方法建筑物2所分割效果相对较差ꎮ表1㊀算法精度对比Tab.1㊀Comparisonbetweenaccuraciesofalgorithms(%)建筑物本文方法RANSAC算法区域生长算法CAQCAQCAQ198.9095.8594.8595.3086.7383.1871.5080.2460.79297.5882.4080.7298.0692.4590.7989.2582.1174.72398.0599.0197.1094.6798.8393.5571.8288.1365.48497.1797.8995.1896.2996.1692.7378.5398.1577.4032国㊀土㊀资㊀源㊀遥㊀感2019年表2㊀建筑物屋顶面分割数量对比Tab.2㊀Comparisonbetweenquantityofroofsofbuildinginsegmentation建筑物实际顶面数量本文方法分割数量RANSAC算法分割数量区域生长算法分割数量1202223142119121038776422223㊀结论本文提出了一种以三角面为基元的基于区域生长算法的复杂建筑物屋顶点云分割算法ꎬ以构建Delaunay三角网方式构建建筑物点云之间关系ꎬ并以各三角面片单位法向量作为判别条件ꎬ依据共边三角面单位法向量的相似性对建筑物屋顶点云进行分割ꎮ1)本文方法避免了对各激光点进行法向量估算ꎬ且无需建立激光点间的邻近关系ꎬ一定程度上简化了传统区域生长算法步骤ꎮ2)虽然本文在屋顶面交界处同区域生长算法一样出现了法向量异常的三角面ꎬ但以三角面为基元的分割方式使法向量异常三角面被其邻近面片所剖分ꎬ部分地解决了屋顶交界处采样点异常问题ꎮ3)对于仍然存在的一部分孤立点与过度分割的面片ꎬ通过RANSAC算法ꎬ快速获取各平面方程系数ꎬ结合AlphaShape算法判断孤立点及各平面邻近关系ꎬ精确合并了孤立点与过度分割面片ꎮ比较于RANSAC算法与传统的区域生长算法ꎬ本文方法所获取结果在分割精度与屋顶面分割数量上均更为理想ꎮ4)本文方法不足之处在于ꎬ以三角面为基元的分割方式对于狭长的建筑物屋顶面分割效果不理想ꎮ该问题将在今后学习研究中完善解决ꎮ参考文献(References):[1]㊀ChenDꎬZhangLQꎬLiJꎬetal.UrbanbuildingroofsegmentationfromairborneLiDARpointclouds[J].InternationalJournalofRe ̄moteSensingꎬ2012ꎬ33(20):6497-6515.[2]㊀FischlerMAꎬBollesRC.Randomsampleconsensus:Aparadigmformodelfittingwithapplicationstoimageanalysisandautomatedcartography[J].ReadingsinComputerVisionꎬ1987:726-740. [3]㊀李云帆ꎬ谭德宝ꎬ刘瑞ꎬ等.顾及建筑物屋顶结构的改进RANSAC点云分割算法[J].国土资源遥感ꎬ2017ꎬ29(4):20-25.doi:10.6046/gtzyyg.2017.04.04.LiYFꎬTanDBꎬLiuRꎬetal.AnimprovedRANSACalgorithmforbuildingpointcloudssegmentationinconsiderationofroofstructure[J].RemotesensingforLandandResourcesꎬ2017ꎬ29(4):20-25.doi:10.6046/gtzyyg.2017.04.04.[4]㊀赵传ꎬ张保明ꎬ郭海涛ꎬ等.基于法向量密度聚类的LiDAR点云屋顶面提取[J].测绘科学技术学报ꎬ2017ꎬ34(4):393-398.ZhaoCꎬZhangBMꎬGuoHTꎬetal.RoofextractusingLiDARpointcloudsbasedonnormalvectordensity-basedclustering[J].JournalofGeomaticsScienceandTechnologyꎬ2017ꎬ34(4):393-398.[5]㊀赵传ꎬ张保明ꎬ陈小卫ꎬ等.一种利用点云邻域信息的建筑物屋顶面高精度自动提取方法[J].测绘学报ꎬ2017ꎬ46(9):1123-1134.ZhaoCꎬZhangBMꎬChenXWꎬetal.Accurateandautomaticbuildingroofextractionusingneighborhoodinformationofpointclouds[J].ActaGeodaeticaetCartographicaSinicaꎬ2017ꎬ46(9):1123-1134.[6]㊀李仁忠ꎬ刘阳阳ꎬ杨曼ꎬ等.基于改进的区域生长三维点云分割[J].激光与光电子学进展ꎬ2018ꎬ55(5):319-325.LiRZꎬLiuYYꎬYangMꎬetal.Three-dimensionalpointcloudsegmentationalgorithmbasedonimprovedregiongrowing[J].La ̄serandOptoelectronicsProgressꎬ2018ꎬ55(5):319-325. [7]㊀于海洋ꎬ余鹏磊ꎬ谢秋平ꎬ等.机载LiDAR数据建筑物顶面点云分割方法研究[J].测绘通报ꎬ2014(6):20-23.YuHYꎬYuPLꎬXieQPꎬetal.BuildingtopsegmentationwithairborneLiDARpointclouddata[J].BulletinofSurveyingandMappingꎬ2014(6):20-23.[8]㊀RabbaniTꎬHeuvelFAVDꎬVosselmanG.Segmentationofpointcloudsusingsmoothnessconstraint[C]//InternationalArchivesofPhotogrammetryꎬRemoteSensingandSpatialInformationSciences.ISPRSꎬ2012:248-253.[9]㊀邹万红ꎬ陈志杨ꎬ叶修梓ꎬ等.一种新的点云数据特征骨架提取方法[J].浙江大学学报(工学版)ꎬ2008ꎬ42(12):2103-2107.ZouWHꎬChenZYꎬYeXZꎬetal.Anewmethodforextractingfeatureskeletonfrompointcloud[J].JournalofZhejiangUniversi ̄ty(EngineeringScience)ꎬ2008ꎬ42(12):2103-2107. [10]EdelsbrunnerHꎬKirkpatrickDꎬSeidelR.Ontheshapeofasetofpointsintheplane[J].InformationTheoryIEEETransactionsonꎬ1983ꎬ29(4):551-559.[11]YangZꎬJiangWꎬXuBꎬetal.Aconvolutionalneuralnetwork-based3DsemanticlabelingmethodforALSpointclouds[J].Re ̄moteSensingꎬ2017ꎬ9(9):936.[12]AwrangjebMꎬFraserCS.Anautomaticandthreshold-freeper ̄formanceevaluationsystemforbuildingextractiontechniquesfromairborneLiDARdata[J].IEEEJournalofSelectedTopicsinAp ̄pliedEarthObservationsandRemoteSensingꎬ2014ꎬ7(10):4184-4198.4252第4期朱军桃ꎬ等:㊀基于区域生长算法的复杂建筑物屋顶点云分割PointcloudsegmentationontheroofofcomplicatedbuildingbasedonthealgorithmofregiongrowingZHUJuntao1ꎬ2ꎬWANGLei1ꎬ2ꎬZHAOChuan3ꎬZHENGXudong1ꎬ2(1.CollegeofGeomaticsandGeoinformationꎬGuilinUniversityofTechnologyꎬGuilin541006ꎬChinaꎻ2.GuangxiKeyLaboratoryofSpatialInformationandGeomaticsꎬGuilin541006ꎬChinaꎻ3.InstituteofSurveyingandMappingꎬInformationEngineeringUniversityꎬZhengzhou450001ꎬChina)Abstract:Segmentinglightdetectionandranging(LiDAR)pointcloudofbuildingaccuratelyistheimportantsectioninthereconstructionofthree-dimensionalmodel.Inviewofthecomplexroofstructureofcomplexbuildingsandpoorsegmentationaccuracyoftheexistingalgorithmsꎬtheauthorsputforwardakindofalgorithmofregiongrowingwiththebasicelementoftrianglestosegmentthepointcloudofthebuilding.FirstofallꎬDelaunaytriangulationnetworkisconstructedꎬcorrelationissetupamonglaserpointsꎬunitnormalvectorsoftrianglesarecalculatedꎬinitialpartitionisconductedonpointcloudwiththecharacterthatvectorsinunitvectorapproachoftrianglesonthesameplaneofthebuildingarebasicallyconsistentꎻthenꎬbecausedispersionanddeviationofpointcloudcouldproducemanydisheveledtrianglesꎬdissectionisconductedonpointsthatarecomposedofdisheveledtrianglesꎻbasedongoodrobustnessofrandomsampleconsensus(RANSAC)algorithmꎬboundariesofplanesofthebuildingcombiningareobtainedwithAlphaShapealgorithmꎬplaneandisolatedpointarecombinedinover-segmentation.Thetestresultshowsthatthepointcloudsegmentationontheroofofthebuildingisidealinintegrityꎬaccuracyandqualitywiththemethodputforwardinthispaper.Keywords:LiDARpointcloudꎻDelaunaytriangulationnetworkꎻRANSACalgorithmꎻAlphaShapealgorithm(责任编辑:张仙)。
link appraisement董智博 鲁 斌华北电力大学 控制与计算机工程学院董智博(通讯作者)男(1995 -)学士,硕士研究生;研究方向为图像处理、计算机视觉;鲁斌(1975 -)男,博士,副教授,计算机视觉等。
本文针对架空输电线路点云,提出改进区域法的观点。
在图1 分割流程为分散的电力设施点云使用改进的区域生长分割算法分割,密度大的地面实体点云使用基于欧式距离的算法分割,实现架空输电线路三维点云的快速、准确分割。
点云预处理,两向量点法向量此算法对法向量估计不准确,受噪音影响较大。
本文采用一种改进算法进行点云法向量估计,在拟合单1)对于点云数据中任一点p,通过式(1)可以得到之间的欧式距离:(1)2)通过Kd-Tree寻找距离点p欧式距离最近的六个(k=1,2,…,6),同时需要满足:相邻的两点p的连线所形成的夹角θ满足55≤θ≤60(p0这样可以尽量选取于六个不同区域的近邻点,保证近邻点分3)通过公式(2)可以得到拟合的单一三角面法向量(2)4)通过公式(3)计算可得点的法向量,如图(3)考虑少数点无法满足步骤(2)的极端情况,在极端情况下的点采用单一三角面拟合求取法向量。
(5)(6)为点法向量,为拟合平面内其他点的法向量3)以种子点为生长中心,构建初始化种子序列图2 架空输电线路分割算法流程图图3 六个近邻点估计点云法向量当α满足阈值γ时,则将该点添加到当前生长区域中:(7)其中为种子法向量,为种子领域内点的法向量;4)将新并入生长区域的点设置作为种子点,重复步骤(b)数据2原始点云图4 点云原始数据(a)数据1原始点云(a)数据1原始点云(c)欧式距离分割1(d)区域生长分割1(e)数据2原始点云(f)本文算法分割2(g)欧式距离分割2图5 电力设施分割结果对比架空线路、地面植物与建筑等。
的电力设施与地面实体(树木)进行了标注,并对实验结(a)数据1原始点云(b)本文算法分割1(c)区域生长算法分割1(d)数据2原始点云(e)本文算法分割2(f)区域生长算法分割2图6 地面实体分割结果对比。
基于区域增长的点云分割方法点云分割是指将点云数据中不同部分分离出来的过程,是三维重建、物体检测与识别、地形分析等领域的重要基础技术。
而基于区域增长的点云分割方法是其中一个经典的方法。
基于区域增长的点云分割方法是一种基于点邻域生长的分割方法。
其过程是首先从点云数据中任选一个点,将其标定为种子点。
然后利用该种子点的邻域信息,逐步将周围的点逐一加入到同一类别中。
如果邻近点的特征与种子点的特征相似,则将其加入同一类别中,反之则划分为其他类别。
如此重复迭代,直到还有剩余的点未分类为止。
基于区域增长的点云分割方法的主要优点有以下几个方面:1. 广泛适用性:该方法适用于各种形状及密度的点云数据,且易于实现和使用。
2. 高鲁棒性:该方法对输入数据噪声、离群点等异常情况有着较好的抗干扰能力。
在异常情况下,只是产生少量误差,不会对整个数据处理结果产生巨大的影响。
3. 高效性:通过优化种子点的选择和邻域搜索方式,可以大大提高算法的效率。
基于区域增长的点云分割方法还可以结合其他点云分割算法进行优化。
例如,可以加入图像分析等技术,对点云数据做更准确的特征提取,以提高算法的分类准确率。
不过基于区域增长的点云分割方法也存在一些不足之处。
例如,对于大规模点云数据的处理,该方法的计算量会非常庞大,影响分割的效率;同时,该方法对于种子点的选择较为依赖,种子点选择不当会导致分割结果的不准确等。
综合来看,基于区域增长的点云分割方法是一种较为经典的点云分割方法,具有广泛适用性、高鲁棒性和高效性等优点。
在实际应用中,可以根据具体需求选取相应的点云分割算法,并结合其他技术进行优化,以达到更好的分割效果。
PCL基于区域生长的点云分割原理与实现PCL(Point Cloud Library)是一款专门用于点云处理的开源库,提供了丰富的点云处理和分析算法。
其中,基于区域生长的点云分割是点云处理的重要任务之一、本文将介绍基于区域生长的点云分割的原理和实现。
一、原理基于区域生长的点云分割算法从一个种子点开始,将其周围的邻域点逐渐添加到同一分割区域,直到满足指定的停止条件。
其核心思想是通过点与点之间的关系,将一部分点云划分为密集相连的区域。
具体来说,基于区域生长的点云分割的原理如下:1.随机选择一个种子点作为起始点。
2.选择一个标准来确定一个点是否与种子点相连。
常见的标准包括欧氏距离、法线向量的夹角等。
3.遍历种子点周围的所有点,检查它们与种子点的连接性。
4.将与种子点相连的点添加到同一分割区域,并标记为已处理。
5.如果满足停止条件(达到指定的点数、区域密度、法线偏差等),则结束当前分割,否则继续添加新的点到分割区域。
6.选择下一个种子点,重复步骤3-5二、实现基于区域生长的点云分割的实现可以使用PCL库中的Segmentation模块。
下面是一个示例代码:```cpp#include <pcl/point_types.h>#include <pcl/io/pcd_io.h>#include <pcl/visualization/cloud_viewer.h>#include <pcl/segmentation/region_growing.h>int main//加载点云数据pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud(newpcl::PointCloud<pcl::PointXYZRGB>);pcl::io::loadPCDFile<pcl::PointXYZRGB>("input_cloud.pcd", *cloud);//区域生长对象pcl::RegionGrowing<pcl::PointXYZRGB, pcl::Normal> reg;reg.setInputCloud(cloud);//计算法线向量pcl::search::Search<pcl::PointXYZRGB>::Ptr tree = boost::shared_ptr<pcl::search::Search<pcl::PointXYZRGB>>(new pcl::search::KdTree<pcl::PointXYZRGB>);pcl::PointCloud<pcl::Normal>::Ptr normals(newpcl::PointCloud<pcl::Normal>);pcl::NormalEstimation<pcl::PointXYZRGB, pcl::Normal> normal_estimator;normal_estimator.setSearchMethod(tree);normal_estimator.setInputCloud(cloud);normal_estimator.setKSearch(15);reg.setInputNormals(normals);//设置区域生长参数reg.setMinClusterSize(50);reg.setSearchMethod(tree);reg.setNumberOfNeighbours(30);reg.setSmoothnessThreshold(3.0 / 180.0 * M_PI);reg.setCurvatureThreshold(1.0);//执行分割std::vector<pcl::PointIndices> clusters;reg.extract(clusters);//可视化结果pcl::visualization::PCLVisualizer viewer("Point Cloud Viewer");viewer.setBackgroundColor(0.0, 0.0, 0.0);int color_index = 0;for (std::vector<pcl::PointIndices>::const_iterator it = clusters.begin(; it != clusters.end(; ++it)pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud_cluster(new pcl::PointCloud<pcl::PointXYZRGB>);for (std::vector<int>::const_iterator pit = it->indices.begin(; pit != it->indices.end(; ++pit)cloud_cluster->points.push_back(cloud->points[*pit]);cloud_cluster->width = cloud_cluster->points.size(;cloud_cluster->height = 1;cloud_cluster->is_dense = true;//将每个分割区域设置为不同的颜色float r = float(rand() / RAND_MAX;float g = float(rand() / RAND_MAX;float b = float(rand() / RAND_MAX;pcl::visualization::PointCloudColorHandlerCustom<pcl::PointX YZRGB> color_handler(cloud_cluster, r, g, b);std::string cloud_id = "cloud_cluster_" +std::to_string(color_index);viewer.addPointCloud<pcl::PointXYZRGB>(cloud_cluster,color_handler, cloud_id);color_index++;}while (!viewer.wasStopped()viewer.spinOnce(;return 0;```在这段代码中,我们首先加载了一个输入点云文件,然后创建了一个区域生长对象。
点云单木分割区域生长算法全文共四篇示例,供读者参考第一篇示例:点云单木分割是数字林业中一个重要的研究领域,其旨在通过对激光雷达等传感器采集到的点云数据进行处理,实现对森林中每棵树木的单独识别和分割。
区域生长算法是其中一种常用的算法,它能够有效地识别并分割出点云中的每一个单独的树木。
本文将重点介绍点云单木分割的区域生长算法原理及其在实际应用中的优势和局限性。
一、点云单木分割的背景与意义点云单木分割是数字林业领域的一个重要课题,它对于森林资源的调查和监测具有重要意义。
传统的野外调查方法需要耗费大量人力物力,而且效率低下。
而基于点云数据的分割技术能够通过数字化手段实现对森林中每个树木的识别和分割,极大地提高了调查效率和准确性。
区域生长算法是实现点云单木分割的一种有效算法,其原理是从一个种子点开始,逐渐生长出一个包含该种子点的树木区域。
通过区域生长算法,可以快速准确地识别出点云中的每一个树木,为后续的森林资源调查和管理提供重要依据。
二、区域生长算法原理区域生长算法是一种基于局部相似性的分割算法,其主要思想是从一个种子点开始,逐步将与该种子点相似的邻近点加入同一个区域,直到所有相似性满足一定条件时停止生长。
具体步骤如下:区域生长算法的核心在于确定相似性的度量方法。
常用的相似性度量方法包括欧氏距离、颜色相似度、法向量相似度等。
通过调节相似性度量方法的参数,可以实现对不同特征的点云数据进行有效的分割。
三、区域生长算法在点云单木分割中的应用区域生长算法在点云单木分割中有着广泛的应用。
通过对点云数据进行区域生长处理,可以实现对森林中每个树木的单独识别和分割。
区域生长算法可以根据不同的相似性度量方法,适应不同类型的点云数据,具有较强的通用性和灵活性。
在实际应用中,区域生长算法能够有效地解决点云数据中存在的噪声和杂乱问题,提高了点云数据的处理效率和准确性。
通过点云单木分割,可以实现森林资源的自动化调查和监测,为森林资源的保护和管理提供重要依据。
山东农业大学学报(自然科学版),2020,51(5):899-903VOL.51NO.52020 Journal of Shandong Agricultural University(Natural Science Edition)doi:10.3969/j.issn.1000-2324.2020.05.023基于区域增长方法的点云分割介维1,张京军1,2,高瑞贞21.河北工程大学信息与电气工程学院,河北邯郸0560382.河北工程大学机械与装备工程学院,河北邯郸056038摘要:点云分割作为现在机器视觉中的热点问题是点云分类、识别以及三维重建的基础,分割结果对后续的场景分析有着重要作用。
本文通过对点云分割展开研究,对三维点云数据进行体素化处理得到体素云,然后在体素空间内进行网格化处理来筛选种子体素,再利用聚类算法形成超体素,完成过分割的处理过程。
根据区域增长算法原理,对过分割得到的超体素数据进行平面拟合,实现点云数据的分割。
实验结果表明本文的分割算法可以提高处理效率,使计算量大大减少,并且使最后的分割结果更加精确。
关键词:点云分割;机器视觉;三维重建;场景分析;区域增长中图法分类号:TP391.4文章标识码:A文章编号:1000-2324(2020)05-0899-05Point Cloud Segmentation Based on Regional Growth MethodJIE Wei1,ZHANG Jing-jun1,2,GAO Rui-zhen21.School of Information and Electrical Engineering/Hebei University of Engineering,Handan056038,China2.School of Mechanical and Equipment Engineering/Hebei University of Engineering,Handan056038,China Abstract:As a hot issue in machine vision,point cloud segmentation is the basis of point cloud classification,recognition and3D reconstruction.The segmentation results play an important role in the subsequent scene analysis.In this paper,point cloud segmentation is studied,and voxel cloud is obtained by voxel processing of three-dimensional point cloud data.Then, seed voxel is screened by grid processing in voxel space,and supervoxel is formed by clustering algorithm to complete the process of over-segmentation.According to the principle of region growth algorithm,plane fitting is carried out for the hypervolume prime data obtained from over-segmentation to realize the segmentation of point cloud data.The experimental results show that the proposed segmentation algorithm can improve the processing efficiency,greatly reduce the computation, and make the final segmentation result more accurate.Keywords:Point cloud segmentation;machine vision;3D modeling;scene analysis;regional growing 当前,已经有很多对二维图像分割与识别方面的研究,图像在采集过程中因受到环境因素的影响,从而影响图片质量,导致分割效果不理想。
基于区域增长的点云分割方法
介绍
点云是由大量的三维空间中的点构成的数据形式,广泛应用于计算机视觉、三维重建和机器人导航等领域。
点云分割是将点云数据划分为不同的区域或对象的过程。
基于区域增长的点云分割方法是一种常见的点云分割算法,其通过根据一组特定的准则将相邻点合并成区域,从而实现点云的分割。
算法流程
基于区域增长的点云分割算法主要包括以下几个步骤:
步骤一:点云预处理
在进行点云分割之前,通常需要对点云数据进行预处理。
预处理包括点云滤波、降采样、法向量计算等操作,以提高点云数据的质量和准确性。
步骤二:种子点选择
在种子点选择阶段,通过一定的准则选取一些代表性的点作为起始点。
种子点的选择对于分割结果的准确性和效率具有重要的影响。
步骤三:区域生长
在区域生长阶段,根据一组特定的准则将与种子点相邻的点合并到同一个区域中。
这些准则可以包括点之间的距离、法向量之间的差异、颜色之间的差异等。
步骤四:区域合并
在区域合并阶段,将相邻的区域合并成更大的区域,以得到更完整的分割结果。
区域合并可以使用不同的方法,如基于几何特征的合并、基于拓扑关系的合并等。
步骤五:后处理
在分割完成后,通常需要进行一些后处理操作。
后处理可以包括去除无效区域、填补空洞、提取特征等。
实验与应用
基于区域增长的点云分割方法已在许多实际应用中得到了广泛应用。
以下是一些实验和应用的案例:
1. 三维重建
基于区域增长的点云分割方法可以用于三维重建中的点云分割和对象提取。
通过将相邻的点合并成区域,可以提取出各个对象的点云数据,从而实现三维重建。
2. 目标检测与识别
在计算机视觉领域,基于区域增长的点云分割方法可以用于目标检测和识别。
通过将同属于一个对象的相邻点合并成区域,可以提取出目标的点云数据,从而实现目标检测和识别。
3. 机器人导航
在机器人导航中,基于区域增长的点云分割方法可以用于环境感知和路径规划。
通过将相邻的点合并成区域,可以提取出障碍物的点云数据,从而实现机器人对环境的感知和路径规划。
优缺点分析
基于区域增长的点云分割方法具有以下优点:
•算法简单直观,易于实现和理解。
•能够根据点之间的几何、颜色和法向量等特征进行分割。
•分割结果能够较好地保留对象的边界和结构细节。
然而,基于区域增长的点云分割方法也存在一些缺点:
•参数设置对分割结果具有较大的影响,需要进行调优。
•对于复杂的场景和噪声点,分割结果可能出现误分割的情况。
•对于不同大小和形状的对象,分割效果可能存在差异。
总结
基于区域增长的点云分割方法是一种常见且有效的点云分割算法。
通过合并相邻点形成区域,该方法能够实现对点云数据的分割,并在三维重建、目标检测与识别、机器人导航等领域得到广泛应用。
然而,该方法也存在一些缺点,需要在实际应用中进行参数调优和误分割处理。
未来,可以进一步研究如何提高基于区域增长的点云分割算法的准确性和鲁棒性,以满足更多实际应用的需求。