地形匹配辅助导航中匹配区域的选择_郑彤
- 格式:pdf
- 大小:1.02 MB
- 文档页数:6
第17卷第2期 中国惯性技术学报 V ol.17 No.2 2009年4月 Journal of Chinese Inertial Technology Apr. 2009 文章编号:1005-6734(2009)02-0191-06地形匹配辅助导航中匹配区域的选择郑 彤1,2,蔡龙飞1,王志刚2,边少锋2(1. 海军驻四三八厂军事代表室,武汉 430064; 2. 海军工程大学 导航工程系,武汉 430033) 摘要:利用海底地形匹配辅助导航是水下载体导航技术致力研究的新方向。
通过多波束测深系统测量获得的真实地形数据,采用ICCP算法为对准匹配算法,分析了实测地形的统计特征对相关匹配性能的影响,给出了地形匹配区域选择准则,并在实测地形图上利用匹配算法对此进行了仿真研究,从而得到水下载体的最佳匹配位置,提高水下载体的导航精度。
关 键 词:水下载体;多波束测深系统;ICCP 算法;地形匹配;导航;匹配区域 中图分类号:U666.1文献标志码:ASelection of matching area in terrain match aided navigationZHENG Tong 1, 2, CAI Long-fei 1, WANG Zhi-gang 2 , BIAN Shao-feng 2(1. Military Representative Office in the 438th Factory, Wuhan 430064, China;2. Institute of Navigation Engineering, Naval University of Engineering, Wuhan 430033, China)Abstract :Terrain match aided navigation is a new method in navigation technology of underwater vehicles. In this paper, the real terrain data were obtained by using Multi-Beam Sounding System, and ICCP algorithm was selected as registration matching algorithm. The measured terrain data and the algorithm show that the terrain matching is influenced by various statistical characteristics of the measured terrain data. The empirical selection criterion of matching area was given by using local terrain standard deviation and local terrain correlation coefficient as quantity indexes in selecting terrain matching area. So the accumulative errors of the Inertial Navigation System can be corrected, and the optimal matching position can be obtained.Key words: underwater vehicles; multi-beam sounding system; ICCP algorithm; terrain matching; navigation; matching area海底地形辅助导航系统[1-6]是近几十年出现的一种新型的导航系统,是水下运动载体导航技术的一个发展方向。

第一步:地形图的配准——加载数据和影像配准工具
(数据:昆明市西山区普吉地形图1:10000 地形图――70011-1.tif)
1、打开ArcMap,添加“影像配准”工具栏。
右键单击工具栏空白处,在弹出的菜单栏里选择“Georeferencing”。
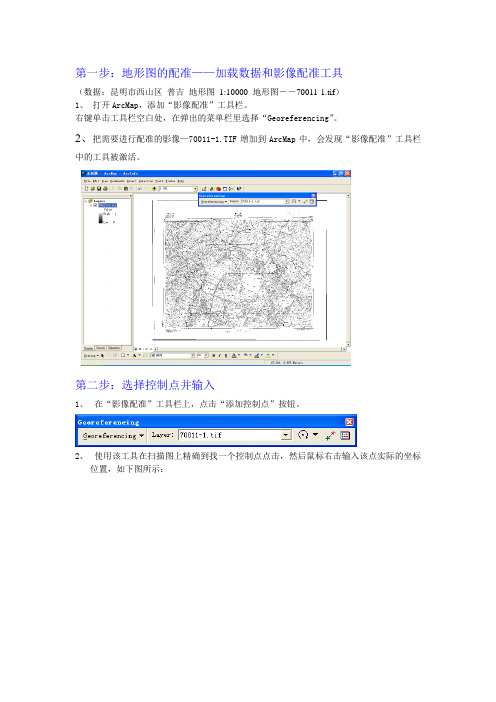
2、把需要进行配准的影像—70011-1.TIF增加到ArcMap中,会发现“影像配准”工具栏中的工具被激活。
第二步:选择控制点并输入
1、在“影像配准”工具栏上,点击“添加控制点”按钮。
2、使用该工具在扫描图上精确到找一个控制点点击,然后鼠标右击输入该点实际的坐标
位置,如下图所示:
像配准”工具栏上的“查看链接表”按钮。
检查控制点的残差和RMS,删除残差特别大的控制点并重新选取控制点。
转换方式设定为“二次多项式”
第三步:设置数据框属性
1、增加所有控制点,并检查均方差(RMS)后,在”影像配准”菜单下,点击“更新显示”。
2、执行菜单命令“视图”-“数据框属性”,设定数据框属性。
在“常规”选项页中,
将地图显示单位设置为“米”。
3、在“坐标系统”选项页中,设定数据框的坐标系统为Xian_1980_Degree_GK_CM_102E”(西安80投影坐标系,3度分带,东经102度中央经线),与扫描地图的坐标系一致
4、更新后,就变成真实的坐标。
第四步:矫正并重采样栅格生成新的栅格文件
1、在”影像配准”菜单下,点击“矫正”,对配准的影像根据设定的变换公式重新采样,另存为一个新的影像文件。
加载重新采样后得到的栅格文件,并将原始的栅格文件从数据框中删除。
通过上面的操作数据已经完成了配准工作。

测绘技术中的数据匹配与配准方法详解引言:测绘技术是现代空间信息技术不可或缺的一部分,它在城市规划、土地利用管理、交通规划等领域都起着重要作用。
在测绘技术中,数据匹配与配准是至关重要的步骤,它们决定了测绘结果的准确性和可靠性。
本文将详细介绍测绘技术中的数据匹配与配准方法。
一、数据匹配方法1. 特征点匹配特征点匹配是一种常见的数据匹配方法,它通过提取图像或地物的特征点,并将其与参考图像或地物的特征点进行匹配,从而实现图像或地物之间的匹配。
常用的特征点提取算法包括SIFT、SURF等。
特征点匹配方法适用于单幅图像匹配,例如航空摄影中的正射影像与DEM数据的匹配。
2. 区域匹配区域匹配是一种基于区域的数据匹配方法,它通过将图像或地物分割成不同的区域,然后将待匹配区域与参考区域进行匹配。
区域匹配方法适用于多波段或多尺度的图像匹配,例如遥感图像的多光谱数据匹配。
3. 点匹配点匹配是一种简单而常用的数据匹配方法,它通过将待匹配点与参考点进行比较,从而实现点之间的匹配。
点匹配方法适用于地面测量数据的匹配,例如全球定位系统(GPS)数据的配准。
二、配准方法1. 基于几何变换的配准基于几何变换的配准是一种常用的配准方法,它通过将待配准数据与参考数据进行几何变换,从而实现两者之间的空间一致性。
常用的几何变换包括平移、旋转、缩放和仿射变换等。
基于几何变换的配准方法适用于相似物体或图像之间的配准。
2. 基于特征变换的配准基于特征变换的配准是一种基于特征点匹配的配准方法,它通过将待配准数据的特征点与参考数据的特征点进行匹配,并根据匹配结果进行变换,从而实现两者之间的配准。
常用的特征变换方法包括RANSAC算法和最小二乘法等。
基于特征变换的配准方法适用于复杂地物或图像之间的配准。
3. 基于图形模型的配准基于图形模型的配准是一种基于图论的配准方法,它通过将待配准数据和参考数据建模成图形模型,并利用图论算法求解最优配准结果。
常用的图形模型方法包括最大似然估计和最大后验概率等。


测绘技术中的地理信息匹配技巧地理信息匹配技巧是现代测绘技术中的关键问题之一。
随着测绘技术的不断发展和应用领域的拓展,地理信息的精确匹配显得尤为重要。
本文将从不同角度探讨地理信息匹配技巧的应用和挑战。
一、测绘技术的发展与地理信息匹配的需求测绘技术是一门旨在获取地球表面实体位置和属性信息的学科。
随着数字化时代的到来,测绘技术得到了广泛的应用,涵盖了各个领域。
在这个过程中,地理信息匹配成为了测绘技术的重要组成部分。
地理信息匹配是指将从不同数据源获取的地理数据进行整合和对齐,以实现数据的一致性和可用性。
例如,在城市规划中,需要将土地利用的数据与地图信息进行匹配,以便更好地进行土地利用分析和模拟。
二、传统匹配技巧的局限与挑战在测绘技术的早期阶段,地理信息匹配主要依靠传统的测量方法和手工处理。
然而,随着数据规模的急剧增长和多源数据的混合应用,传统的匹配技巧逐渐显露出局限性和挑战。
首先,传统的匹配技巧通常依赖于专家的经验和判断,容易受到主观因素的影响,导致结果不够精确和可靠。
其次,传统的匹配技巧在处理大规模数据时效率较低,无法满足快速处理和实时应用的需求。
最后,传统的匹配技巧对于不同数据源之间的异构性处理能力有限,无法有效解决空间数据的异构性和不一致性问题。
三、新技术在地理信息匹配中的应用随着计算机科学、人工智能和地理信息系统等领域的不断发展,新技术也在地理信息匹配中得到了广泛应用。
以下是几个常见的新技术在地理信息匹配中的应用:1. 机器学习算法:机器学习算法可以通过学习样本数据的特征和规律来建立模型,并用于地理信息的自动分类和匹配。
例如,监督学习算法可以通过训练数据来预测地理信息的属性和位置,无需手工处理。
2. 图像处理技术:图像处理技术可以通过分析地理图像的颜色、纹理和形状等特征,实现地理信息的识别和匹配。
例如,在遥感影像中,可以通过图像配准技术实现不同时间点的影像的对齐和匹配。
3. 空间数据库:空间数据库可以提供高效的数据管理和查询功能,用于存储和检索地理信息数据。
基于ICCP匹配算法的海底地形匹配辅助导航
郑彤;边少锋;王志刚
【期刊名称】《海洋测绘》
【年(卷),期】2008(028)002
【摘要】利用海底地形辅助导航是水下载体导航技术致力研究的新方向,采用ICCP算法作为对准匹配算法,利用实测地形数据和已知地形数据库,进行仿真计算,修正惯性导航系统累计误差,得到水下载体的最佳匹配位置,以提高水下载体的导航精度.
【总页数】4页(P21-23,28)
【作者】郑彤;边少锋;王志刚
【作者单位】海军工程大学,导航工程系,湖北,武汉,430033;海军工程大学,导航工程系,湖北,武汉,430033;海军工程大学,导航工程系,湖北,武汉,430033
【正文语种】中文
【中图分类】P227.9
【相关文献】
1.海底地形匹配辅助导航技术研究 [J], 李临
2.海底地形匹配辅助导航技术现状及发展 [J], 李临
3.基于ICCP和TERCOM的水下地形匹配组合算法研究 [J], 张立;杨惠珍
4.ICCP重力匹配辅助导航算法研究及改进 [J], 白文平;王志刚
5.基于DSP和FPGA的海底地形匹配辅助导航系统设计 [J], 王刚;龚俊斌;田金文
因版权原因,仅展示原文概要,查看原文内容请购买。
景象匹配导航中的航路点自动提取算法
公续平;程咏梅;宋琳;刘楠
【期刊名称】《计算机仿真》
【年(卷),期】2014(31)8
【摘要】针对景象匹配导航中适配区提取算法选取适配区时存在匹配精度低、速度慢的问题,提出了一种航路点自动提取算法.利用图像灰度信息、边缘信息和图像间互相关信息,对航拍图像中不同尺度图像样本进行参数训练,进而得到各尺度下的分类参数,并通过支持向量机完成航路点区域的自动粗分类.针对航路点选取过于密集导致选取的航路点不唯一及计算量增加的问题,在欧式距离分类法基础上,提出了多分类无监督聚类算法,从而实现航路点的优化.仿真和航拍数据结果表明改进的算法可以自动提取航路点,并且提取的航路点具有信息量丰富、稳定性好、匹配精度高及速度快等优点.
【总页数】5页(P60-63,203)
【作者】公续平;程咏梅;宋琳;刘楠
【作者单位】西北工业大学自动化学院,陕西西安710072;西北工业大学自动化学院,陕西西安710072;西北工业大学自动化学院,陕西西安710072;西北工业大学自动化学院,陕西西安710072
【正文语种】中文
【中图分类】TP391.9
【相关文献】
1.无人车导航路径关键点插值算法 [J], 陆峰;章永进;李鹏;赵明
2.一种改进的田间导航特征点提取算法 [J], 陈艳;李春贵;胡波
3.基于Vxworks操作系统的航路点导航系统研究 [J], 刘利强;李丽;丁凯
4.航路点方位校正方法在飞行器导航中的应用研究 [J], 白亮;秦永元;成研
5.一种搜索导航航路点信息的验证方法 [J], 刘经纬
因版权原因,仅展示原文概要,查看原文内容请购买。
第17卷第2期 中国惯性技术学报 V ol.17 No.2 2009年4月 Journal of Chinese Inertial Technology Apr. 2009 文章编号:1005-6734(2009)02-0191-06地形匹配辅助导航中匹配区域的选择郑 彤1,2,蔡龙飞1,王志刚2,边少锋2(1. 海军驻四三八厂军事代表室,武汉 430064; 2. 海军工程大学 导航工程系,武汉 430033) 摘要:利用海底地形匹配辅助导航是水下载体导航技术致力研究的新方向。
通过多波束测深系统测量获得的真实地形数据,采用ICCP算法为对准匹配算法,分析了实测地形的统计特征对相关匹配性能的影响,给出了地形匹配区域选择准则,并在实测地形图上利用匹配算法对此进行了仿真研究,从而得到水下载体的最佳匹配位置,提高水下载体的导航精度。
关 键 词:水下载体;多波束测深系统;ICCP 算法;地形匹配;导航;匹配区域 中图分类号:U666.1文献标志码:ASelection of matching area in terrain match aided navigationZHENG Tong 1, 2, CAI Long-fei 1, WANG Zhi-gang 2 , BIAN Shao-feng 2(1. Military Representative Office in the 438th Factory, Wuhan 430064, China;2. Institute of Navigation Engineering, Naval University of Engineering, Wuhan 430033, China)Abstract :Terrain match aided navigation is a new method in navigation technology of underwater vehicles. In this paper, the real terrain data were obtained by using Multi-Beam Sounding System, and ICCP algorithm was selected as registration matching algorithm. The measured terrain data and the algorithm show that the terrain matching is influenced by various statistical characteristics of the measured terrain data. The empirical selection criterion of matching area was given by using local terrain standard deviation and local terrain correlation coefficient as quantity indexes in selecting terrain matching area. So the accumulative errors of the Inertial Navigation System can be corrected, and the optimal matching position can be obtained.Key words: underwater vehicles; multi-beam sounding system; ICCP algorithm; terrain matching; navigation; matching area海底地形辅助导航系统[1-6]是近几十年出现的一种新型的导航系统,是水下运动载体导航技术的一个发展方向。
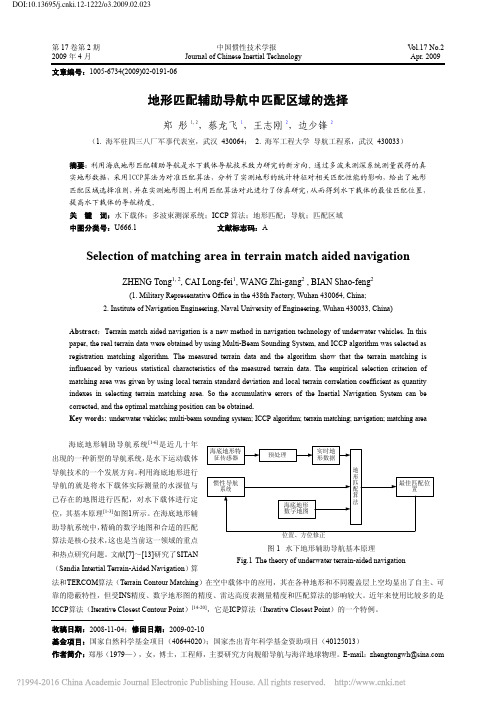
利用海底地形进行导航的就是将水下载体实际测量的水深值与已存在的地图进行匹配,对水下载体进行定位,其基本原理[1-3]如图1所示。
在海底地形辅助导航系统中,精确的数字地图和合适的匹配算法是核心技术,这也是当前这一领域的重点和热点研究问题。
文献[7]~[13]研究了SITAN (Sandia Intertial Terrain-Aided Navigation )算法和TERCOM 算法(Terrain Contour Matching )在空中载体中的应用,其在各种地形和不同覆盖层上空均显出了自主、可靠的隐蔽特性,但受INS 精度、数字地形图的精度、雷达高度表测量精度和匹配算法的影响较大。
近年来使用比较多的是ICCP 算法(Iterative Closest Contour Point )[14-20],它是ICP 算法(Iterative Closest Point )的一个特例。
收稿日期:2008-11-04;修回日期:2009-02-10基金项目:国家自然科学基金项目(40644020);国家杰出青年科学基金资助项目(40125013)作者简介:郑彤(1979—),女,博士,工程师,主要研究方向舰船导航与海洋地球物理。
E-mail :zhengtongwh@Fig.1The theory of underwater terrain-aided navigationDOI:10.13695/ki.12-1222/o3.2009.02.023192 中国惯性技术学报 第17卷多波束测深系统[21]是在回声测深仪的基础上发展起来一项的海底地形精密勘测技术,是近几十年来海洋测绘界进行海底地形条带式探测的热点。
本文利用的海洋测绘多波束测量试验测得的真实地形数据,建立真实地形数据库,为水下载体实现水下、长期、精确导航提供技术支撑。
地形匹配辅助导航系统的导航定位精度不仅与匹配算法有关,而且与地形匹配区域的选择[22]有关。
如何选择地形匹配区域是地形辅助惯性导航走向实用化的一个亟待解决的问题。
本文从相关地形匹配方法的工作原理入手,分析了实测地形的统计特征(如粗糙度、标准差、相关性、坡度等)对相关匹配性能的影响,给出了地形匹配区域选择准则,并在实测地形图上对此进行了仿真研究。
1 匹配算法ICCP 算法最初来源于图像配准的 ICP 算法。
它不需事前确定对应估计,只是不断重复(初始)运动变换——确定最近点——求运动变换的过程,逐步改进运动的估计,如图2所示。
对于ICCP 算法的匹配过程可解释为:从已知点0P 出发,沿真实航迹航行,并不断测量水深。
在实时测深传感器没有测量误差的情况下,这些测量点一定落在对应的等值线上。
由于有测量误差,测量航迹给出的位置一定偏离对应等值线。
分别设指示航迹位置点集合为{}n P ,对应的实际航迹点集合为{}n X 。
为了求得真实位置,将测量航迹与真实航迹匹配,需要确定刚性变换T (包括一个旋转分量和二个平移分量),通过刚性变换T 使集合{}n P 与集合{}n X 的距离最小。
由于集合{}n X 一定在等值线上,只是无法确定在等值线上的确切位置,因而在最优化目标函数的基础上采用迭代方法寻找刚性变换T ,使式(1)表示的距离最小。
21(,)(,)Nk i in M C TX M Y TX y Tp ===−∑ (1)式中,T 表示变换,包括旋转和平移。
2 获得真实地形数据进行海上航行测量试验,利用多波束测深系统测量真实的地形数据。
多波束测深系统是采用发射、接收指向性正交的两组换能器阵获得一系列垂直航向分布的窄波束。
如图3所示波束数为16,波束角为2°×2°的单方面换能器多波束系统。
图3中系统声信号的发射和接收由方向垂直的发射阵和接收阵组成。
发射阵平行船纵向排列,呈两侧堆成向下方发射2°(沿船纵向)×44°(沿船横向)的扇形脉冲声波。
接收阵沿船横向排列,但在束控方向上接收方式与发射方式正好相反,以20°(沿船纵向)×2°(沿船横向)的16个接收波束角接收来自海底照射面积为发射2°(沿船纵向)×44°(沿船横向)的扇区回波。
接收的回波经过原始的编辑后,就可以得到真实的地形数据了,但为保密起见,本文中涉及的地形图都将经纬度隐去。
3 可匹配区域地形匹配辅助导航系统的导航定位精度不仅与匹配算法有关,而且与地形匹配区域的选择有关。
下面重点介绍地形可匹配区域的选择。
海底地形数据一般采用格网矩阵的方式存储,设某地形区域的经纬度跨度为M N × 网格,(,)h i j 为网格点坐标为(,)i j 处的地形值。
为了分析局部地形的统计特征,定义了大小为m n ×的局部计算窗口,用来计算局部地形区域的各个统计参数。
当计算窗口的中心在整个区域全部网格点上移动一遍后,就可以得到整个地形区域的各个局部的统计特征值。
地形特征参数定义可采用地形场特征参数来定义:1) 地形标准差。
它反映的是地形高程偏离地形平均高程的范围,是反映地形整体起伏剧烈程度的宏观参数。
图3 多波束测深系统示意图 Fig.3 The theory of multi-beam sounding第2期 郑彤等:地形匹配辅助导航中匹配区域的选择 193σ=, 111(,)m n i j h h i j mn ===∑∑ (2) 2) 粗糙度。
粗糙度是单位平面上地形表面积大小的度量。
粗糙度越大,单位平面上地形的表面积越大,地形局部起伏越剧烈;粗糙度越小,单位平面上地形的表面积越小,地形局部起伏越平缓。
经度方向的绝对粗糙度r λ和纬度方向的绝对粗糙度r φ为1111(,)(1,)(1)m n i j r h i j h i j n m λ−===−+−∑∑, 1111(,)(,1)(1)m n i j r h i j h i j m n φ−===−+−∑∑ (3) 3) 局部地形相关系数。
经度方向的相关系数反映了经度方向的地形剖面在纬度方向上的相关程度,影响经度方向的地形匹配;同理,纬度方向的相关系数反映了纬度方向的地形剖面在经度方向上的相关程度,影响纬度方向的地形匹配。
经度方向的相关系数R λ和纬度方向的相关系数R φ为12111[(,)][(1,)](1)m ni j R h i j h h i j h n m λσ−===−+−−∑∑, 12111[(,)][(,1)](1)m ni j R h i j h h i j h m n φσ−===−+−−∑∑ (4)4) 局部地形坡度。
坡度S 定义为地形曲面上一点处的法线方向和垂直方向的夹角,它可以由地形区域在经度方向和 纬度方向的变化率S λ和S φ来确定:1[(1,1)(1,)(1,1)(1,1)(1,)(1,1)]6S h i j h i j h i j h i j h i j h i j λ=++++++−−−−−−−−+,1[(1,1)(,1)(1,1)(1,1)(,1)(1,1)]6S h i j h i j h i j h i j h i j h i j φ=−++++−+−−−−−−+−,S = (5)4 仿真分析在地形图上采取移动计算窗口的方法对上述统计参数进行计算,为便于对比和分析,计算结果用填色等值线图显示。