
无线(WLAN)技术漫游实现描述
一、FAT AP架构下,AP设备不做认证时:
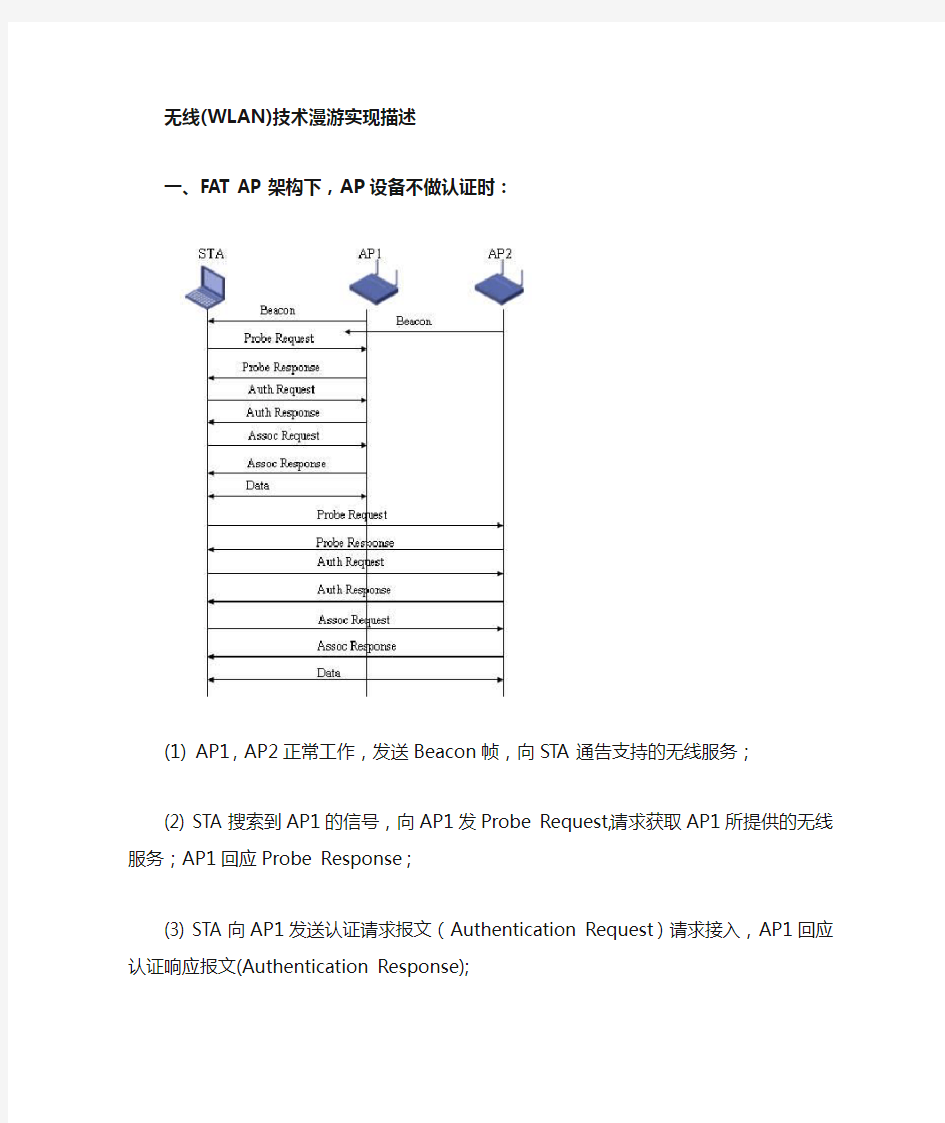
(1) AP1,AP2正常工作,发送Beacon帧,向STA通告支持的无线服务;
(2) STA搜索到AP1的信号,向AP1发Probe Request,请求获取AP1所提供的无线服务;AP1回应Probe Response;
(3) STA向AP1发送认证请求报文(Authentication Request)请求接入,AP1回应认证响应报文(Authentication Response);
(4) STA向AP1发送关联请求报文(Association Request)进行关联,AP1回应关联响应报文(Association Response)。STA与AP间建立链路层连接;
(5) STA不需要进行身份认证,通过AP1成功连入网络。
(6) 当STA从AP1往AP2方向移动,感知到AP2的信号强度渐大,AP1强度渐弱,当AP2与AP1的信号强度差达到一定门限时,STA开始向AP2发起认证和关联请求,(通过Probe Request/Response, Authentication Request/Response 以及Association Request/Response报文);
(7) STA与AP2的链路层连接建立成功后,成功连入网络。
二、AC+FIT AP架构下,AC上不做认证时:
(1) AP1与AP2分别与AC建立CAPWAP隧道;
(2) AP1,AP2发送Beacon帧,向STA通告支持的无线服务;
(3) STA搜索到AP1的信号,向AP1发Probe Request,请求获取AP1所提供的无线服务;AP1回应Probe Response;
(4) STA向AP1发送认证请求报文(Authentication Request)请求接入,AP1透传报文到AC,AC通过AP1回应认证响应报文(Authentication Response);
(5) STA向AP1发送关联请求报文(Association Request)进行关联,AP1透传报文至AC,AC回应关联响应报文(Association Response)。STA与AP1间建立链路层连接;
(6) STA不需要进行身份认证,通过AP1成功连入网络。
(7) 当STA从AP1往AP2方向移动,感知到AP2的信号强度渐大,AP1强度渐弱,当AP2与AP1的信号强度差达到一定门限时,STA开始向AP2发起认证和关联请求,(通过Probe Request/Response, Authentication Request/Response 以及Association Request/Response报文),建立无线链路连接;
(8) AC通过AP1向STA发送一个去认证报文,通知STA从AP1下线;
(9) STA通过AP2成功连入网络。
三、FAT AP架构下,在AP上进行802.1X认证时:
(1) AP1,AP2正常工作,发送Beacon帧,向STA通告支持的无线服务;
(2) STA搜索到AP1的信号,向AP1发Probe Request,请求获取AP1所提供的无线服务;AP1回应Probe Response;
(3) STA向AP1发送认证请求报文(Authentication Request)请求接入,AP1回应认证响应报文(Authentication Response);
(4) STA向AP1发送关联请求报文(Association Request)进行关联,AP1回应关联响应报文(Association Response)。STA与AP间建立链路层连接;
(5) AP1向STA发起802.1X协商,用户输入用户名、密码,AP1通过Radius 协议把用户名、密码发到Radius服务器上进行认证。
(6) 802.1X认证成功后,STA与服务器间协商出PMK,同时服务器把PMK下发到AP1上。
(7) STA与AP1进行四次握手协商,通过PMK协商得到STA与AP1间数据加密所用的PTK。
(8) STA通过AP1成功连入网络。
(9) 当STA从AP1往AP2方向移动,感知到AP2的信号强度渐大,AP1强度渐弱,当AP2与AP1的信号强度差达到一定门限时,STA开始向AP2发起认证和关联请求,(通过Probe Request/Response, Authentication Request/Response 以及Association Request/Response报文);
(10) STA与AP2的链路层连接建立成功后,因AP2上没有STA的身份信息,因此还需要与STA进行802.1X协商,并得到STA与AP2之间的PMK;
(11) 802.1X协商成功后,STA与AP2进一步通过四次握手协商数据加密密钥PTK;
(12) STA通过AP2成功连入网络。
四、AC+FIT AP架构下,AC上做802.1X认证时:
(1) AP1与AP2分别与AC建立CAPWAP隧道;
(2) AP1,AP2发送Beacon帧,向STA通告支持的无线服务;
(3) STA搜索到AP1的信号,向AP1发Probe Request,请求获取AP1所提供的无线服务;AP1回应Probe Response;
(4) STA向AP1发送认证请求报文(Authentication Request)请求接入,AP1透传报文到AC,AC通过AP1回应认证响应报文(Authentication Response);
(5) STA向AP1发送关联请求报文(Association Request)进行关联,AP1透传报文至AC,AC回应关联响应报文(Association Response)。STA与AP1间建立链路层连接;
(6) AP1与STA开始802.1X协商,用户输入用户名、密码,AC通过Radius 协议把用户名、密码发到Radius服务器上进行认证。
(7) 802.1X认证成功后,STA与服务器间协商出PMK,同时服务器把PMK下发到AC上。
(8) STA与AC之间进行四次握手协商,通过PMK协商得到STA与AP1间数据加密所用的PTK,AC把PTK下发到AP1上。
(9) STA通过AP1成功连入网络。
(10) 当STA从AP1往AP2方向移动,感知到AP2的信号强度渐大,AP1强度渐弱,当AP2与AP1的信号强度差达到一定门限时,STA开始向AP2发起认证和关联请求,(通过Probe Request/Response, Authentication
Request/Response以及Association Request/Response报文);
(11) STA与AP2的链路层连接建立成功后,因AC上已经有STA的身份信息,因此不需要再进行802.1X协商,而是直接使用之前得到的PMK进行STA与AP2间的四次握手协议协商AP2与STA间的数据加密密钥PTK;
(12) AC通过AP1向STA发送一个去认证报文,通知STA从AP1下线;
(13) STA通过AP2成功连入网络。
图像记忆的原理和方法[图像拼接原理及方法] 第一章绪论 1.1 图像拼接技术的研究背景及研究意义 图像拼接(image mosaic)是一个日益流行的研究领域,他已经成为照相绘图学、计算机视觉、图像处理和计算机图形学研究中的热点。图像拼接解决的问题一般式,通过对齐一系列空间重叠的图像,构成一个无缝的、高清晰的图像,它具有比单个图像更高的分辨率和更大的视野。 早期的图像拼接研究一直用于照相绘图学,主要是对大量航拍或卫星的图像的整合。近年来随着图像拼接技术的研究和发展,它使基于图像的绘制(IBR )成为结合两个互补领域——计算机视觉和计算机图形学的坚决焦点,在计算机视觉领域中,图像拼接成为对可视化场景描述(Visual Scene Representaions)的主要研究方法:在计算机形学中,现实世界的图像过去一直用于环境贴图,即合成静态的背景和增加合成物体真实感的贴图,图像拼接可以使IBR 从一系列真是图像中快速绘制具有真实感的新视图。 在军事领域网的夜视成像技术中,无论夜视微光还是红外成像设备都会由于摄像器材的限制而无法拍摄视野宽阔的图片,更不用说
360 度的环形图片了。但是在实际应用中,很多时候需要将360 度所拍摄的很多张图片合成一张图片,从而可以使观察者可以观察到周围的全部情况。使用图像拼接技术,在根据拍摄设备和周围景物的情况进行分析后,就可以将通过转动的拍摄器材拍摄的涵盖周围360 度景物的多幅图像进行拼接,从而实时地得到超大视角甚至是360 度角的全景图像。这在红外预警中起到了很大的作用。 微小型履带式移动机器人项目中,单目视觉不能满足机器人的视觉导航需要,并且单目视觉机器人的视野范围明显小于双目视觉机器人的视野。利用图像拼接技术,拼接机器人双目采集的图像,可以增大机器人的视野,给机器人的视觉导航提供方便。在虚拟现实领域中,人们可以利用图像拼接技术来得到宽视角的图像或360 度全景图像,用来虚拟实际场景。这种基于全景图的虚拟现实系统,通过全景图的深度信息抽取,恢复场景的三维信息,进而建立三维模型。这个系统允许用户在虚拟环境中的一点作水平环视以及一定范围内的俯视和 仰视,同时允许在环视的过程中动态地改变焦距。这样的全景图像相当于人站在原地环顾四周时看到的情形。在医学图像处理方面,显微镜或超声波的视野较小,医师无法通过一幅图像进行诊视,同时对于大目标图像的数据测量也需要把不完整的图像拼接为一个整体。所以把相邻的各幅图像拼接起来是实现远程数据测量和远程会诊的关键 环节圆。在遥感技术领域中,利用图像拼接技术中的图像配准技术可以对同一区域的两幅或多幅图像进行比较,也可以利用图像拼接技术
第一章绪论 1.1图像拼接技术的研究背景及研究意义 图像拼接(image mosaic)是一个日益流行的研究领域,他已经成为照相绘图学、计算机视觉、图像处理和计算机图形学研究中的热点。图像拼接解决的问题一般式,通过对齐一系 列空间重叠的图像,构成一个无缝的、高清晰的图像,它具有比单个图像更高的分辨率和更大的视野。 早期的图像拼接研究一直用于照相绘图学,主要是对大量航拍或卫星的图像的整合。近年来随着图像拼接技术的研究和发展,它使基于图像的绘制( IBR )成为结合两个互补领域 ――计算机视觉和计算机图形学的坚决焦点,在计算机视觉领域中,图像拼接成为对可视化 场景描述(Visual Seene Representaions)的主要研究方法:在计算机形学中,现实世界的图像过去一直用于环境贴图,即合成静态的背景和增加合成物体真实感的贴图,图像拼接可以 使IBR从一系列真是图像中快速绘制具有真实感的新视图。 在军事领域网的夜视成像技术中,无论夜视微光还是红外成像设备都会由于摄像器材的限制而无法拍摄视野宽阔的图片,更不用说360度的环形图片了。但是在实际应用中,很 多时候需要将360度所拍摄的很多张图片合成一张图片,从而可以使观察者可以观察到周围的全部情况。使用图像拼接技术,在根据拍摄设备和周围景物的情况进行分析后,就可以将通过转动的拍摄器材拍摄的涵盖周围360度景物的多幅图像进行拼接,从而实时地得到 超大视角甚至是360度角的全景图像。这在红外预警中起到了很大的作用。 微小型履带式移动机器人项目中,单目视觉不能满足机器人的视觉导航需要,并且单目 视觉机器人的视野范围明显小于双目视觉机器人的视野。利用图像拼接技术,拼接机器人双 目采集的图像,可以增大机器人的视野,给机器人的视觉导航提供方便。在虚拟现实领域中,人们可以利用图像拼接技术来得到宽视角的图像或360度全景图像,用来虚拟实际场景。 这种基于全景图的虚拟现实系统,通过全景图的深度信息抽取,恢复场景的三维信息,进而建立三维模型。这个系统允许用户在虚拟环境中的一点作水平环视以及一定范围内的俯视和仰视,同时允许在环视的过程中动态地改变焦距。这样的全景图像相当于人站在原地环顾四 周时看到的情形。在医学图像处理方面,显微镜或超声波的视野较小,医师无法通过一幅图 像进行诊视,同时对于大目标图像的数据测量也需要把不完整的图像拼接为一个整体。所以把相邻的各幅图像拼接起来是实现远程数据测量和远程会诊的关键环节圆。在遥感技术领域中,利用图像拼接技术中的图像配准技术可以对来自同一区域的两幅或多幅图像进行比较,也可以利用图像拼接技术将遥感卫星拍摄到的有失真地面图像拼接成比较准确的完整图像,作为进一步研究的依据。 从以上方面可以看出,图像拼接技术的应用前景十分广阔,深入研究图像拼接技术有着很重 要的意义 1.2图像拼接算法的分类 图像拼接作为这些年来图像研究方面的重点之一,国内外研究人员也提出了很多拼接算 法。图像拼接的质量,主要依赖图像的配准程度,因此图像的配准是拼接算法的核心和关键。根据图像匹配方法的不同仁阔,一般可以将图像拼接算法分为以下两个类型: (1) 基于区域相关的拼接算法。 这是最为传统和最普遍的算法。基于区域的配准方法是从待拼接图像的灰度值出发,对 待配准图像中一块区域与参考图像中的相同尺寸的区域使用最小二乘法或者其它数学方法 计算其灰度值的差异,对此差异比较后来判断待拼接图像重叠区域的相似程度,由此得到待
第一章绪论 1.1 图像拼接技术的研究背景及研究意义 图像拼接(image mosaic)是一个日益流行的研究领域,他已经成为照相绘图学、计算机视觉、图像处理和计算机图形学研究中的热点。图像拼接解决的问题一般式,通过对齐一系列空间重叠的图像,构成一个无缝的、高清晰的图像,它具有比单个图像更高的分辨率和更大的视野。 早期的图像拼接研究一直用于照相绘图学,主要是对大量航拍或卫星的图像的整合。近年来随着图像拼接技术的研究和发展,它使基于图像的绘制(IBR)成为结合两个互补领域——计算机视觉和计算机图形学的坚决焦点,在计算机视觉领域中,图像拼接成为对可视化场景描述(Visual Scene Representaions)的主要研究方法:在计算机形学中,现实世界的图像过去一直用于环境贴图,即合成静态的背景和增加合成物体真实感的贴图,图像拼接可以使IBR从一系列真是图像中快速绘制具有真实感的新视图。 在军事领域网的夜视成像技术中,无论夜视微光还是红外成像设备都会由于摄像器材的限制而无法拍摄视野宽阔的图片,更不用说360 度的环形图片了。但是在实际应用中,很多时候需要将360 度所拍摄的很多张图片合成一张图片,从而可以使观察者可以观察到周围的全部情况。使用图像拼接技术,在根据拍摄设备和周围景物的情况进行分析后,就可以将通过转动的拍摄器材拍摄的涵盖周围360 度景物的多幅图像进行拼接,从而实时地得到超大视角甚至是360 度角的全景图像。这在红外预警中起到了很大的作用。 微小型履带式移动机器人项目中,单目视觉不能满足机器人的视觉导航需要,并且单目视觉机器人的视野范围明显小于双目视觉机器人的视野。利用图像拼接技术,拼接机器人双目采集的图像,可以增大机器人的视野,给机器人的视觉导航提供方便。在虚拟现实领域中,人们可以利用图像拼接技术来得到宽视角的图像或360 度全景图像,用来虚拟实际场景。这种基于全景图的虚拟现实系统,通过全景图的深度信息抽取,恢复场景的三维信息,进而建立三维模型。这个系统允许用户在虚拟环境中的一点作水平环视以及一定范围内的俯视和仰视,同时允许在环视的过程中动态地改变焦距。这样的全景图像相当于人站在原地环顾四周时看到的情形。在医学图像处理方面,显微镜或超声波的视野较小,医师无法通过一幅图像进行诊视,同时对于大目标图像的数据测量也需要把不完整的图像拼接为一个整体。所以把相邻的各幅图像拼接起来是实现远程数据测量和远程会诊的关键环节圆。在遥感技术领域中,利用图像拼接技术中的图像配准技术可以对来自同一区域的两幅或多幅图像进行比较,也可以利用图像拼接技术将遥感卫星拍摄到的有失真地面图像拼接成比较准确的完整图像,作为进一步研究的依据。 从以上方面可以看出,图像拼接技术的应用前景十分广阔,深入研究图像拼接技术有着很重要的意义 1.2图像拼接算法的分类 图像拼接作为这些年来图像研究方面的重点之一,国内外研究人员也提出了很多拼接算法。图像拼接的质量,主要依赖图像的配准程度,因此图像的配准是拼接算法的核心和关键。根据图像匹配方法的不同仁阔,一般可以将图像拼接算法分为以下两个类型:(1) 基于区域相关的拼接算法。 这是最为传统和最普遍的算法。基于区域的配准方法是从待拼接图像的灰度值出发,对
图像拼接算法及实现(一) 来源:中国论文下载中心 [ 09-06-03 16:36:00 ] 作者:陈挺编辑:studa090420 论文关键词:图像拼接图像配准图像融合全景图 论文摘要:图像拼接(image mosaic)技术是将一组相互间重叠部分的图像序列进行空间匹配对准,经重采样合成后形成一幅包含各图像序列信息的宽视角场景的、完整的、高清晰的新图像的技术。图像拼接在摄影测量学、计算机视觉、遥感图像处理、医学图像分析、计算机图形学等领域有着广泛的应用价值。一般来说,图像拼接的过程由图像获取,图像配准,图像合成三步骤组成,其中图像配准是整个图像拼接的基础。本文研究了两种图像配准算法:基于特征和基于变换域的图像配准算法。在基于特征的配准算法的基础上,提出一种稳健的基于特征点的配准算法。首先改进Harris角点检测算法,有效提高所提取特征点的速度和精度。然后利用相似测度NCC(normalized cross correlation——归一化互相关),通过用双向最大相关系数匹配的方法提取出初始特征点对,用随机采样法RANSAC(Random Sample Consensus)剔除伪特征点对,实现特征点对的精确匹配。最后用正确的特征点匹配对实现图像的配准。本文提出的算法适应性较强,在重复性纹理、旋转角度比较大等较难自动匹配场合下仍可以准确实现图像配准。 Abstract:Image mosaic is a technology that carries on the spatial matching to a series of image which are overlapped with each other, and finally builds a seamless and high quality image which has high resolution and big eyeshot. Image mosaic has widely applications in the fields of photogrammetry, computer vision, remote sensing image processing, medical image analysis, computer graphic and so on. 。In general, the process of image mosaic by the image acquisition, image registration, image synthesis of three steps, one of image registration are the basis of the entire image mosaic. In this paper, two image registration algorithm: Based on the characteristics and transform domain-based image registration algorithm. In feature-based registration algorithm based on a robust feature-based registration algorithm points. First of all, to improve the Harris corner detection algorithm, effectively improve the extraction of feature points of the speed and accuracy. And the use of a similar measure of NCC (normalized cross correlation - Normalized cross-correlation), through the largest correlation coefficient with two-way matching to extract the feature points out the initial right, using random sampling method RANSAC (Random Sample Consensus) excluding pseudo-feature points right, feature points on the implementation of the exact match. Finally with the correct feature point matching for image registration implementation. In this paper, the algorithm adapted, in the repetitive texture, such as relatively large rotation more difficult to automatically match occasions can still achieve an accurate image registration. Key words: image mosaic, image registration, image fusion, panorama 第一章绪论
图像拼接算法及实现(一) 论文关键词:图像拼接图像配准图像融合全景图 论文摘要:图像拼接(image mosaic)技术是将一组相互间重叠部分的图像序列进行空间匹配对准,经重采样合成后形成一幅包含各图像序列信息的宽视角场景的、完整的、高清晰的新图像的技术。图像拼接在摄影测量学、计算机视觉、遥感图像处理、医学图像分析、计算机图形学等领域有着广泛的应用价值。一般来说,图像拼接的过程由图像获取,图像配准,图像合成三步骤组成,其中图像配准是整个图像拼接的基础。本文研究了两种图像配准算法:基于特征和基于变换域的图像配准算法。在基于特征的配准算法的基础上,提出一种稳健的基于特征点的配准算法。首先改进Harris角点检测算法,有效提高所提取特征点的速度和精度。然后利用相似测度NCC(normalized cross correlation——归一化互相关),通过用双向最大相关系数匹配的方法提取出初始特征点对,用随机采样法RANSAC(Random Sample Consensus)剔除伪特征点对,实现特征点对的精确匹配。最后用正确的特征点匹配对实现图像的配准。本文提出的算法适应性较强,在重复性纹理、旋转角度比较大等较难自动匹配场合下仍可以准确实现图像配准。 Abstract:Image mosaic is a technology that carries on the spatial matching to a series of image which are overlapped with each other, and finally builds a seamless and high quality image which has high resolution and big eyeshot. Image mosaic has widely applications in the fields of photogrammetry, computer vision, remote sensing image processing, medical image analysis, computer graphic and so on. 。In general, the process of image mosaic by the image acquisition, image registration, image synthesis of three steps, one of image registration are the basis of the entire image mosaic. In this paper, two image registration algorithm: Based on the characteristics and transform domain-based image registration algorithm. In feature-based registration algorithm based on a robust feature-based registration algorithm points. First of all, to improve the Harris corner detection algorithm, effectively improve the extraction of feature points of the speed and accuracy. And the use of a similar measure of NCC (normalized cross correlation - Normalized cross-correlation), through the largest correlation coefficient with two-way matching to extract the feature points out the initial right, using random sampling method RANSAC (Random Sample Consensus) excluding pseudo-feature points right, feature points on the implementation of the exact match. Finally with the correct feature point matching for image registration implementation. In this
图像拼接原理及方法 This model paper was revised by the Standardization Office on December 10, 2020
第一章绪论 图像拼接技术的研究背景及研究意义 图像拼接(image mosaic)是一个日益流行的研究领域,他已经成为照相绘图学、计算机视觉、图像处理和计算机图形学研究中的热点。图像拼接解决的问题一般式,通过对齐一系列空间重叠的图像,构成一个无缝的、高清晰的图像,它具有比单个图像更高的分辨率和更大的视野。 早期的图像拼接研究一直用于照相绘图学,主要是对大量航拍或卫星的图像的整合。近年来随着图像拼接技术的研究和发展,它使基于图像的绘制(IBR)成为结合两个互补领域——计算机视觉和计算机图形学的坚决焦点,在计算机视觉领域中,图像拼接成为对可视化场景描述(Visual Scene Representaions)的主要研究方法:在计算机形学中,现实世界的图像过去一直用于环境贴图,即合成静态的背景和增加合成物体真实感的贴图,图像拼接可以使IBR从一系列真是图像中快速绘制具有真实感的新视图。 在军事领域网的夜视成像技术中,无论夜视微光还是红外成像设备都会由于摄像器材的限制而无法拍摄视野宽阔的图片,更不用说360 度的环形图片了。但是在实际应用中,很多时候需要将360 度所拍摄的很多张图片合成一张图片,从而可以使观察者可以观察到周围的全部情况。使用图像拼接技术,在根据拍摄设备和周围景物的情况进行分析后,就可以将通过转动的拍摄器材拍摄的涵盖周围360 度景物的多幅图像进行拼接,从而实时地得到超大视角甚至是360 度角的全景图像。这在红外预警中起到了很大的作用。 微小型履带式移动机器人项目中,单目视觉不能满足机器人的视觉导航需要,并且单目视觉机器人的视野范围明显小于双目视觉机器人的视野。利用图像拼接技术,拼接机器人双目采集的图像,可以增大机器人的视野,给机器人的视觉导航提供方便。在虚拟现实领域中,人们可以利用图像拼接技术来得到宽视角的图像或360 度全景图像,用来虚拟实际场景。这种基于全景图的虚拟现实系统,通过全景图的深度信息抽取,恢复场景的三维信息,进而建立三维模型。这个系统允许用户在虚拟环境中的一点作水平环视以及一定范围内的俯视和仰视,同时允许在环视的过程中动态地改变焦距。这样的全景图像相当于人站在原地环顾四周时看到的情形。在医学图像处理方面,显微镜或超声波的视野较小,医师无法通过一幅图像进行诊视,同时对于大目标图像的数据测量也需要把不完整的图像
内蒙古科技大学 本科生毕业设计说明书(毕业论文) 题目:图像拼接方法及其应用研究 学生姓名:杨洪升 学号:1167118201 专业:电子信息工程 班级:电信二班 指导教师:史明泉
图像拼接方法及其应用研究 摘要 图像拼接技术顾名思义就是将数张有重叠部分的图像拼成一幅大型的无缝高分辨率图像的技术,在遥感技术领域、虚拟现实领域、医学图像处理领域等都有广泛的应用。 本文首先分析了目前主流科研图像配准和图像融合的算法,重点研究了SIFT算法和Harris算子,RANSAC算法的图像拼接,并对其中的一些问题做出了改进和个人的分析。 在本文中对于图像的隐试信息,采取了多尺度表示的图像方法解决,在对于图像的各种操作时都是考虑这些基本问题,其中尺度不变的特征用来图像匹配和物体的识别,本文中对sift算法在图像拼接中的问题做了详细的概述。 基于特征点的图像拼接中,在提取特征点和检测中做了一些详细的研究,在图像的特点上,本文中提出了一种基于Harris算法结合鲁棒性较高RANSAC算法提纯匹配点,其主要的思想在于去除经典Harris算法中出现的特征点聚集,这样大大减少了RANSAC 算法进行图像配准的运算时间。 关键词:图像拼接;图像配准;特征提取;图像融合
Research on the application of image mosaic method Abstract Image stitching technology is as the name suggests the number of images into overlapping part of a large seamless high resolution image technology, In the field of remote sensing technology, the field of virtual reality, the field of medical image processing and is widely used in. This paper analysis of the current mainstream algorithms and image fusion, focuses on the SIFT algorithm and Harris algorithm, RANSAC algorithm for image stitching. In this paper for the image of implicit information, solve the image method adopted a multiple solutions representation for various operations, in the image are considered these basic questions, including the scale invariant features for image matching and object recognition, in this paper, the image matching problem of SIFT algorithm to do a detailed overview. Based on the feature points of the image stitching. This to do some detailed research on the feature extraction and detection, image features, this paper proposes a Harris algorithm based on RANSAC algorithm with high robustness, which greatly reduced the RANSAC algorithm for image registration computing time. Keywords: image mosaic, image registration, feature extraction, image fusion.
第一章绪论 1、1 图像拼接技术的研究背景及研究意义 图像拼接(image mosaic)就是一个日益流行的研究领域,她已经成为照相绘图学、计算机视觉、图像处理与计算机图形学研究中的热点。图像拼接解决的问题一般式,通过对齐一系列空间重叠的图像,构成一个无缝的、高清晰的图像,它具有比单个图像更高的分辨率与更大的视野。 早期的图像拼接研究一直用于照相绘图学,主要就是对大量航拍或卫星的图像的整合。近年来随着图像拼接技术的研究与发展,它使基于图像的绘制(IBR)成为结合两个互补领域——计算机视觉与计算机图形学的坚决焦点,在计算机视觉领域中,图像拼接成为对可视化场景描述(Visual Scene Representaions)的主要研究方法:在计算机形学中,现实世界的图像过去 一直用于环境贴图,即合成静态的背景与增加合成物体真实感的贴图,图像拼接可以使IBR从一系列真就是图像中快速绘制具有真实感的新视图。 在军事领域网的夜视成像技术中,无论夜视微光还就是红外成像设备都会由于摄像器材的限制而无法拍摄视野宽阔的图片,更不用说360 度的环形图片了。但就是在实际应用中, 很多时候需要将360 度所拍摄的很多张图片合成一张图片,从而可以使观察者可以观察到周围的全部情况。使用图像拼接技术,在根据拍摄设备与周围景物的情况进行分析后,就可以将通过转动的拍摄器材拍摄的涵盖周围360 度景物的多幅图像进行拼接,从而实时地得到超大视角甚至就是360 度角的全景图像。这在红外预警中起到了很大的作用。 微小型履带式移动机器人项目中,单目视觉不能满足机器人的视觉导航需要,并且单目视觉机器人的视野范围明显小于双目视觉机器人的视野。利用图像拼接技术,拼接机器人双目采集的图像,可以增大机器人的视野,给机器人的视觉导航提供方便。在虚拟现实领域中,人们可以利用图像拼接技术来得到宽视角的图像或360 度全景图像,用来虚拟实际场景。这种基于全景图的虚拟现实系统,通过全景图的深度信息抽取,恢复场景的三维信息,进而建立三维 模型。这个系统允许用户在虚拟环境中的一点作水平环视以及一定范围内的俯视与仰视,同时允许在环视的过程中动态地改变焦距。这样的全景图像相当于人站在原地环顾四周时瞧到的情形。在医学图像处理方面,显微镜或超声波的视野较小,医师无法通过一幅图像进行诊视,同时对于大目标图像的数据测量也需要把不完整的图像拼接为一个整体。所以把相邻的各幅图像拼接起来就是实现远程数据测量与远程会诊的关键环节圆。在遥感技术领域中,利用图像拼接技术中的图像配准技术可以对来自同一区域的两幅或多幅图像进行比较,也可以利用图像拼接技术将遥感卫星拍摄到的有失真地面图像拼接成比较准确的完整图像,作为进一步研究的依据。 从以上方面可以瞧出,图像拼接技术的应用前景十分广阔,深入研究图像拼接技术有着很重要的意义 1、2图像拼接算法的分类 图像拼接作为这些年来图像研究方面的重点之一,国内外研究人员也提出了很多拼接算法。图像拼接的质量,主要依赖图像的配准程度,因此图像的配准就是拼接算法的核心与关键。根据图像匹配方法的不同仁阔,一般可以将图像拼接算法分为以下两个类型: (1) 基于区域相关的拼接算法。 这就是最为传统与最普遍的算法。基于区域的配准方法就是从待拼接图像的灰度值出发,对待配准图像中一块区域与参考图像中的相同尺寸的区域使用最小二乘法或者其它数学方法计算其灰度值的差异,对此差异比较后来判断待拼接图像重叠区域的相似程度,由此得到待拼接图像重叠区域的范围与位置,从而实现图像拼接。也可以通过FFT 变换将图像由时域变
图像拼接:图像拼接技术就是将数张有重叠部分的图像(可能是不同时间,不同视角或者不同传感器获得的)拼成一幅大型的无缝高分辨率图像的技术。使用普通相机获取宽视野的场景图像时,因为相机的分辨率一定,拍摄的场景越大,得到的图像分辨率就越低;而全景相机、广角镜头等不仅非常昂贵,而且失真也比较严重。为了在不降低图像分辨率的条件下获取超宽视角甚至3 6 0度的全景图,利用计算机进行图像拼接被提出并逐 渐研究发展起来。现在,图像拼接技术已经成为计算机图形学的研究焦点,被广泛应用于空间探测、遥感图像处理、医学图像分析、视频压缩和传输、虚拟现实技术、超分辨率重构等领域。图像配准和图像融合是图像拼接的两个关键技术。图像配准是图像融合的基础,而且图像配准算法的计算量一般非常大,因此图像拼接技术的发展很大程度上取决于图像配准技术的创新。图像拼接的方法很多,不同的算法步骤会有一定差异,但大致的过程是相同的。一般来说,图像拼接主要包括以下五步: a ) 图像预处理。包括数字图像处理的基本操作(如去噪、边缘提取、直方图处理等)、建立图像的匹配模板以及对图像进行某种变换(如傅里叶变换、小波变换等)等操作。 b ) 图像配准。就是采用一定的匹配策略,找出待拼接图像中的模板或特征点在参考图像中对应的位置,进而确定两幅图像之间的变换关系。 C ) 建立变换模型。根据模板或者图像特征之间的对应关系,计算
出数学模型中的各参数值,从而建立丽幅图像的数学变换模型。· d ) 统一坐标变换。根据建立的数学转换模型,将待拼接图像转换到参考图像的坐标系中,完成统一坐标变换。 e ) 融合重构。将带拼接图像的重合区域进行融合得到拼接重构的平滑无缝全景图像。图像拼接的关键是精确找出相邻丽张图像中重叠部分的位置,然后确定两张图像的变换关系,即图像配准。由于视角、拍摄时间、分辨率、光照强度、传感器类型等的差异,待拼接的图像往往存在平移、旋转、尺度变化、透视形变、色差、扭曲、运动目标遮挡等差别,配准的目的就是找出一种最能描述待拼接图像之间映射关系的变换模型。E l 前常用的一些空间变换模型有平移变换、刚性变换、仿射变换以及投影变换等。图像的平移关系比较容易检测和配准,但旋转和尺度缩放的检测比较困难。许多新的图像配准算法都是针对这一特点进行算法设计的。图像融合是图像拼接的另一个关键技术。图像融合是将两幅已配准图像中有用信息综合到一幅图像中并以可视化方法显示的技术。配准后的图像由于分辨率和视角的不同以及光照等因素的影响,有时甚至是多光谱图像之间进行的拼接,在图像拼接的重叠部分有时会产生模糊、鬼影或噪声点,边界处也可能形成明显的拼缝。为了改善拼接图像的视觉效果和客观质量,需要对拼接后的图像进行融合。