轮系习题课
- 格式:ppt
- 大小:262.50 KB
- 文档页数:12
第六章轮系计算题专项训练(附答案)1、已知齿数和转速,求蜗轮的转速和各轮的回转方向。
齿数和转速的关系可以用传动比公式i=n1/n4来表示,因此先求出传动比i,再用i和n1求出n4.i的计算公式为i=z2z4z5z6/z1z2'z4'z5',代入数据计算得到i=220.7.然后代入i 和n1=800r/min,求得n4=3.62r/min。
回转方向可以根据齿轮的齿数和传动方式(直接传动或倒置传动)来确定。
2、已知各轮的齿数,求传动比i。
传动比的计算公式为i=z2z4z5z6/z1z2'z4'z5',代入数据计算得到i=16.3、已知各轮的齿数和蜗杆的参数,求传动比i。
传动比的计算公式同样为i=z2z4z5z6/z1z2'z4'z5',代入数据计算得到i=17.4、已知各轮的齿数和主动轴的转速,求齿轮5的转速和方向。
先用传动比公式i=n1/n5求得i=200,再用i和n1=500r/min求得n5=2.5r/min。
齿轮5的方向可以根据箭头来确定。
5、已知各轮的齿数,求传动比i。
传动比的计算公式同样为i=z2z4z5z6/z1z2'z4'z5',代入数据计算得到i=16.6、已知各轮的齿数和主动轴的转速,求传动比i和齿轮5的转动方向。
传动比的计算公式同样为i=z2z4z5z6/z1z2'z4'z5',代入数据计算得到i=40.齿轮5的方向可以根据箭头来确定。
7、已知各轮的齿数和蜗杆的参数,求传动比i和轮6的转速和方向。
传动比的计算公式同样为i=z2z4z5z6/z1z2'z4'z5',代入数据计算得到i=4.轮6的转速可以用传动比公式i=n1/n6求得,代入n1=1200r/min和i=4计算得到n6=300r/min。
轮6的方向可以根据蜗杆的旋转方向和箭头来确定。
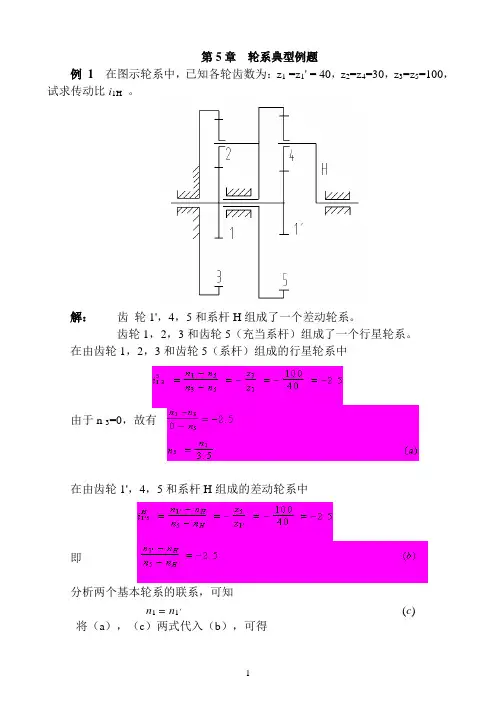
第5章轮系典型例题例1在图示轮系中,已知各轮齿数为:z1 =z1' = 40,z2=z4=30,z3=z5=100,试求传动比i1H。
解:齿轮1',4,5和系杆H组成了一个差动轮系。
齿轮1,2,3和齿轮5(充当系杆)组成了一个行星轮系。
在由齿轮1,2,3和齿轮5(系杆)组成的行星轮系中由于n 3=0,故有在由齿轮1',4,5和系杆H组成的差动轮系中即分析两个基本轮系的联系,可知n1= n1'(c)将(a),(c)两式代入(b),可得计算结果为正,表明从动系杆H和主动齿轮1的转向相同。
例2 在图示轮系中,已知各轮齿数为:z 1 = 90,z 2 = 60,z 2' = 30,z 3 =30,z 3' = 24,z 4 = 18,z 5 = 60,z 5' = 36,z 6 = 32。
运动从A,B两轴输入,由构件H输出。
已知n A=100r/min,n B=900r/min,转向如图所示。
试求输出轴H的转速n H的大小和方向。
解:齿轮3',4,5和系杆H组成了一个差动轮系齿轮1,2,2',3组成了一个定轴轮系,齿轮5',6组成了另一个定轴轮系。
对于齿轮3',4,5和系杆H组成的差动轮系,有即对于齿轮1,2,2',3组成的定轴轮系,有即对于齿轮5,6组成的定轴轮系,有即分析三个轮系之间的基本联系,有将该结果带入(a)式,可得化简整理后得计算结果为负,说明n H转向与n 5 相同,即n A,n B转向相反。
例3 在图示轮系中,已知齿轮1的转速为n 1 =1650 r/min,齿轮4的转速n4=1000r/min,所有齿轮都是标准齿轮,且z 2=z 5=z 6=20。
求各个齿轮中未知的齿轮齿数。
解:由齿轮1与齿轮3和齿轮6与齿轮4的同轴条件得齿轮1,2,3及系杆H1组成差动轮系;齿轮4,5,6及系杆H2组成行星轮系。
知识巩固一、填空题1.由一系列相互啮合的齿轮所组成的传动系统称为也系。
2.三星齿轮机构或滑移齿轮机构常用增、减惰轮的方法实现变电的要求。
3.根据轮系中各轮轴线在空间的相对位置是否固定,轮系可分为定轴轮系和周转轮系两类。
4.加惰轮的轮系只能改变_________ 的旋转方向,不能改变轮系的. o二、选择题1.当两轴相距较远,且要求传动准确,应采用A.带传动B.链传动C.蜗杆传动D.齿轮系传动2. 传动比恒定。
A.皮带传动B.链传动C.齿轮传动D.螺旋传动3.轮系中的惰轮常用于改变—oA.轮系的传动比大小B.从动轮的转向C.传动距离D.结构形式三、判断题1.轮系中加惰轮会改变总传动比的大小();又会改变从动轮的旋转方向。
()。
2.轮系和摩擦轮传动一样易于实现无级变速。
()3.至少有一个齿轮的几何轴线绕另一个齿轮旋转的轮系称为定轴轮系。
()4.定轴轮系传动比,等于该轮系的所有从动齿轮齿数连乘积与所有主动齿轮齿数连乘积之比。
()5.轮系可以实现变速和变向要求。
()6.轮系传动既可以用于相距较远两轴间传动,又可以获得较大传动比。
()四、名词解释轮系五、做一做观察一下汽车的变速箱,总结轮系的功用一、填空题1.轮系。
2.变向。
3.定轴轮、周转轮系。
4.从动轮,传动比。
二、选择题1. D2. C3. B三、判断题1. ×2. X3. X4. Y5. 46. Y四、名词解释轮系答:一系列的齿轮组成的传动系统称为轮系五、做一做观察一下汽车的变速箱,总结轮系的功用答:一系列的齿轮组成的传动系统称为轮系 1.实现两轴间远距禽的运动和动力的传动 2.实现变速传动3.实现换向传动4.实现差速作用一、填空题1.轮系中,首末两轮转速之比,称为轮系的使动比。
2.定轴轮系的传动比,等于组成该轮系的所有轮齿数连乘积与所有轮齿数连乘积之比。
二、选择填空1.轮系中,—转速之比称为轮系的传动比。
A.末轮和首轮B.末轮和中间轮C.首轮和末轮D.首轮和中间轮2,轮系传动比的大小与轮系中的惰轮的齿数—。
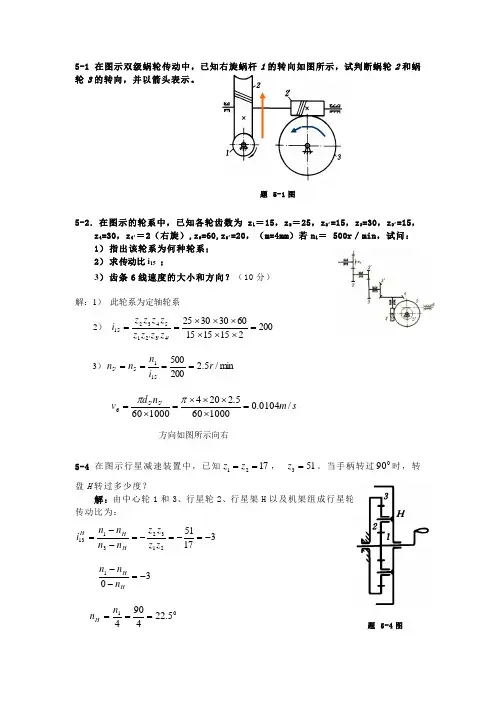
5-1 在图示双级蜗轮传动中,已知右旋蜗杆1的转向如图所示,试判断蜗轮2和蜗轮3的转向,并以箭头表示。
5-2.在图示的轮系中,已知各轮齿数为z l =15,z 2=25,z 2´=15,z 3=30,z 3´=15,z 4=30,z 4´=2(右旋),z 5=60,z 5´=20,(m=4mm )若n l = 500r /min ,试问:1) 指出该轮系为何种轮系;2) 求传动比i 15 ; 3) 齿条6线速度的大小和方向?(10分)解:1) 此轮系为定轴轮系2) 200215151560303025'4'3'21543215=⨯⨯⨯⨯⨯⨯==z z z z z z z z i 3)min /5.22005001515'5r i n n n ==== s m n d v /0104.01000605.2204100060'5'56=⨯⨯⨯⨯=⨯=ππ方向如图所示向右5-4 在图示行星减速装置中,已知1721==z z , 513=z 。
当手柄转过090时,转盘H 转过多少度?解:由中心轮1和3、行星轮2、行星架H 以及机架组成行星轮系,转化轮系的传动比为:3175121323113-=-=-=--=z z z z n n n n i H H H 301-=--HH n n n 015.224904===n n H 题 5-4图题 5-1图方向相同5-5 在图示的手动葫芦中,S 为手动链轮,H 为起重链轮。
已知121=z ,282=z ,142='z ,543=z ,求传动比SH i 。
解:由中心轮1和3、行星轮2-2’、行星架H 行星轮系,故()914125428''1213221321313113-=⨯⨯-=-=-=--==z z z z z z z z n n n n n n i H H H H H 03=n ,1n n s =101===∴HH s sH n n n n i 5-8 在图示圆锥齿轮组成的行星轮系中,已知各轮的齿数为201=z ,302=z ,502='z ,803=z ,m in /501r n =,求H n 的大小和方向。
轮系习题答案一、填空题:1.轮系可以分为:定轴轮系和周转轮系。
2.定轴轮系是指:当轮系运动时,各轮轴线位置固定不动的轮系;周转轮系是指:轮系运动时,凡至少有一个齿轮的轴线是绕另一齿轮的轴线转动的轮系。
3.周转轮系的组成部分包括:太阳轮、行星轮和行星架。
4.行星轮系具有1个自由度,差动轮系有 2自由度。
5、行星轮系的同心条件是指:要使行星轮系能正常运转,其基本构件的回转线必须在同一直线上。
6、确定行星轮系中各轮齿数的条件包括:传动比条件、同心条件、均布条件、邻接条件。
7、正号机构和负号机构分别是指:转化轮系的传动比H 1n i 为正号或者负号的周转轮系。
动力传动中多采用负号机构。
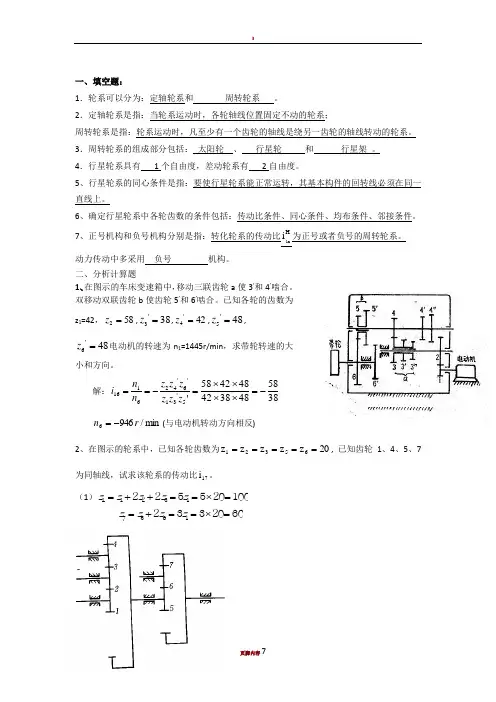
二、分析计算题 1、在图示的车床变速箱中,移动三联齿轮a 使3’和4’啮合。
双移动双联齿轮b 使齿轮5’和6’啮合。
已知各轮的齿数为z 1=42,582=z ,38'3=z ,42'4=z ,48'5=z ,48'6=z 电动机的转速为n 1=1445r/min ,求带轮转速的大小和方向。
解:3858483842484258'5'31'6'426116-==-==z z z z z z n n i min /9466r n -=(与电动机转动方向相反)2、在图示的轮系中,已知各轮齿数为20z z z z z 65321=====,已知齿轮1、4、5、7为同轴线,试求该轮系的传动比17i 。
(1)z z z z z 41231225520100=++==?=z z z z 75612332060=+==?=(2)iz z z z zz z z z z17323467123561=-()=-=-100602020153、在图示轮系中,已知:蜗杆为单头且右旋,转速n11440= r/min,转动方向如图示,其余各轮齿数为:402=z,20'2=z,303=z,18'3=z,544=z,试:(1)说明轮系属于何种类型;(2)计算齿轮4得转速n4;(3)在图中标出齿轮4的转动方向。
第六章:1、 如何区分定轴轮系、行星轮系和混合轮系?答:定轴轮系在运转时,各个齿轮的轴线相对于机架的位置是固定的。
周转轮系在运转时,其中至少有一个齿轮轴线的位置并不固定,而是绕着其他齿轮的固定轴线回转,轮系中既有定轴轮系,又有周转轮系,或是几部分周转轮系组成的。
2、 怎样计算定轴轮系的传动比?如何确定从动轮的转向?答:积所有主动轮齿数的连乘积所有从动轮齿数的连乘=i 首、末两轮的轴线平行时,当两者转向相同时为“正”,否则为“负” 或用标箭头的方法。
3、 什么是“转化轮系”?引入转化轮系的目的何在?答:在整个周转轮系上加一个与系杆方向向反的公共角速度,则行星架“静止不动”,周转轮系转化成定轴轮系,为原周转轮系的转化轮系。
目的是简化周转轮系的传动比计算。
4、 轮系有哪些功用?答:实现分路传动,实现换向转动,实现运动的合成与分解,实现大功率传递。
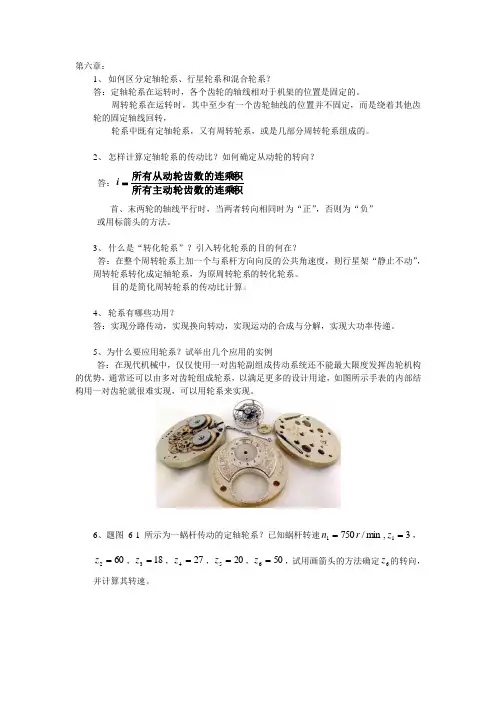
5、为什么要应用轮系?试举出几个应用的实例答:在现代机械中,仅仅使用一对齿轮副组成传动系统还不能最大限度发挥齿轮机构的优势,通常还可以由多对齿轮组成轮系,以满足更多的设计用途,如图所示手表的内部结构用一对齿轮就很难实现,可以用轮系来实现。
6、题图6-1所示为一蜗杆传动的定轴轮系?已知蜗杆转速min /7501r n =,31=z ,602=z ,183=z ,274=z ,205=z ,506=z ,试用画箭头的方法确定6z 的转向,并计算其转速。
答:75201835027605316426116=⨯⨯⨯⨯===z z z z z z n n i min /101616r i n n ==7、 题图6-2所示为卷杨机传动示意图,悬挂重物G 的钢丝绳绕在鼓轮5上,鼓轮5与蜗轮4联接在一起。
已知各齿轮的齿数:201=z ,602=z ,23=z (右旋),1204=z 。
试求:(1)轮系的传动比14i ;(2)若重物上升,加在手把上的力将使轮1如何转动?答:18022012060314214=⨯⨯==z z z z i 手把上的力应为逆时针方向。
一、填空題:1.轮系可以分为:定轴轮系和周转轮系。
2.定轴轮系是指:当轮系运动时,各轮轴线位置固定不动的轮系;周转轮系是指:轮系运动时,凡至少有一个齿轮的轴线是绕另一齿轮的轴线转动的轮系。
3.周转轮系的组成部分包括:太阳轮、行星轮和行星架。
4.行星轮系具有L个自由度,差动轮系有—自由度。
5.行星轮系的同心条件是指:要使行星轮系能正常运转,其基本构件的回转线必须在同一直线上。
6.确定行星轮系中各轮齿数的条件包括:传动比条件、同心条件、均布条件、邻接条件。
7、正号机构和负号机构分别是指:巷化轮系的传泌加正号或者负号的周转轮系。
动力传动中多米用负号机构。
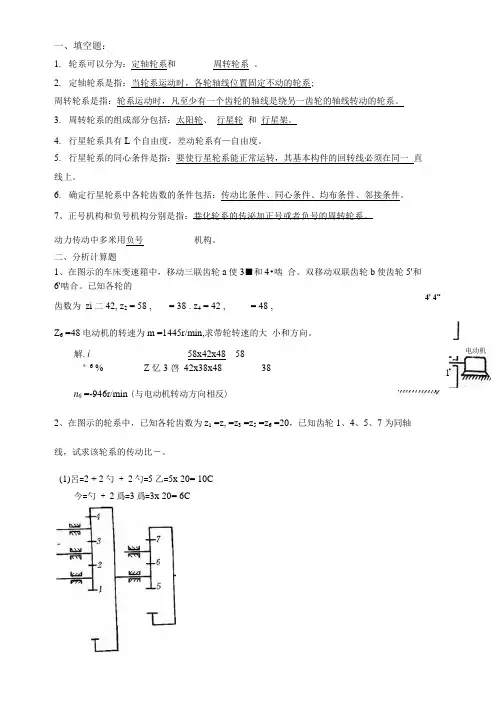
二、分析计算题1、在图示的车床变速箱中,移动三联齿轮a使3■和4•啮合。
双移动双联齿轮b使齿轮5'和6'啮合。
已知各轮的齿数为zi二42, z2 = 58 , = 38 . z4 = 42 , = 48 ,Z6 =48电动机的转速为m =1445r/min,求带轮转速的大小和方向。
解.i_ 58x42x48 _ 58',6 % Z 忆3 啓42x38x48 38n6 =-946r/min (与电动机转动方向相反)2、在图示的轮系中,已知各轮齿数为z1 =z, =z3 =z5 =z6 =20,已知齿轮1、4、5、7 为同轴线,试求该轮系的传动比―。
(1)呂=2 + 2勺 + 2勺=5乙=5x 20= 10C今=勺 + 2爲=3爲=3x 20= 6C 4' 4”电动机1⑵心=(』适丢一卑聖一153、在图示轮系中,已知:蜗杆为单头且右旋,转速^ = 1440r/miii,转动方向如图示, 其余各轮齿数为:=4° •金・=20, = 30 t z y = 18 , z4 = 54 , 试:(1) 说明轮系属于何种类型;(2)计算齿轮4得转速q;在图中标出齿轮4的转动方向。
(3)(1) 定轴轮系(2) 口=逐224 =“"XIS x 14松8r/min勺•勺•勺40x 30x 544、如图所示为一手摇提升装置,其中各轮齿数均已知,试求传动比并指出当提升重物时手柄的转向(从左往右看时的转向)解:方向判断用画箭头的方法完成,从左往右看时的转向为逆时针方向。
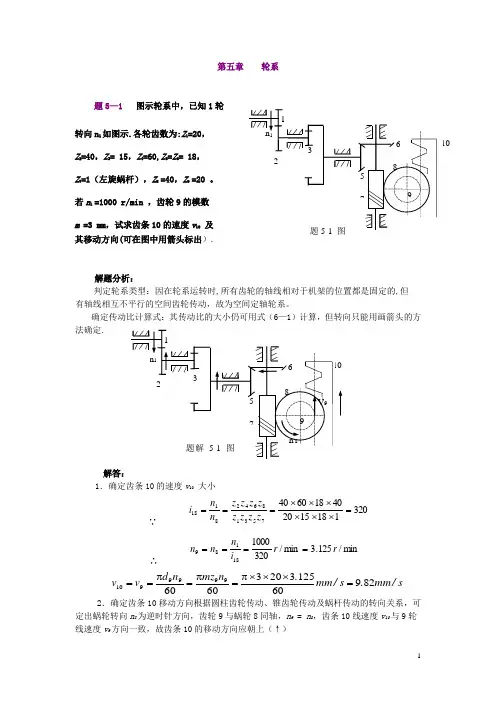
第五章 轮系题5—1 图示轮系中,已知1轮转向n 1如图示.各轮齿数为:Z 1=20,Z 2=40,Z 3= 15,Z 4=60,Z 5=Z 6= 18, Z 7=1(左旋蜗杆),Z 8 =40,Z 9 =20 。
若n 1 =1000 r/min ,齿轮9的模数m =3 mm ,试求齿条10的速度v 10 及其移动方向(可在图中用箭头标出).解题分析:判定轮系类型:因在轮系运转时,所有齿轮的轴线相对于机架的位置都是固定的,但 有轴线相互不平行的空间齿轮传动,故为空间定轴轮系。
确定传动比计算式:其传动比的大小仍可用式(6—1)计算,但转向只能用画箭头的方法确定.解答:1.确定齿条10的速度v 10 大小∵320118152040186040753186428118=⨯⨯⨯⨯⨯⨯===z z z z z z z z n n i∴min /125.3min /320100018189r r i n n n ====s /mm .s /mm .n mz n d v v 82960125320360609999910=⨯⨯⨯π=π=π==2.确定齿条10移动方向根据圆柱齿轮传动、锥齿轮传动及蜗杆传动的转向关系,可定出蜗轮转向n 8为逆时针方向,齿轮9与蜗轮8同轴,n 9 = n 8,齿条10线速度v 10与9轮线速度v 9方向一致,故齿条10的移动方向应朝上(↑)题5-2 图示轮系中,已知蜗杆1Z 2= 50 ;蜗杆2′为单头右旋蜗杆, 蜗轮3的齿数为Z 3=40;其余各轮齿 数为;Z 3′=30,Z 4 = 20 ,Z 4′ = 26 , Z 5 =18,Z 5′=28,Z 6=16,Z 7=18。
要求:(1) 分别确定蜗轮2、蜗轮3的 轮齿螺旋线方向及转向n 2、n 3 ; (2) 计算传动比i 17 ,并确定齿 轮7的转向n 7。
解题分析:判定轮系类型:因在轮系运转 时,所有齿轮的轴线相对于机架的 位置都是固定的,但有轴线相互不 平行的空间齿轮传动,故为空间定 轴轮系。
轮系一、复习思考题1.为什么要应用轮系?试举出几个应用轮系的实例?2.何谓定轴轮系?何谓周转轮系?行星轮系与差动轮系有何区别? 3.什么叫惰轮?它在轮系中有什么作用?4.定轴轮系的传动比如何计算?式中(-1)m有什么意义? 5.定轴轮系末端的转向怎样判别?6.如果轮系的末端轴是螺旋传动,应如何计算螺母的移动量?二、填空题1.由若干对齿轮组成的齿轮机构称为 。
2.根据轮系中齿轮的几何轴线是否固定,可将轮系分 轮系、 轮系和 轮系三种。
3.对平面定轴轮系,始末两齿轮转向关系可用传动比计算公式中 的符号来判定。
4.行星轮系由 、 和 三种基本构件组成。
5.在定轴轮系中,每一个齿轮的回转轴线都是 的。
6.惰轮对 并无映响,但却能改变从动轮的 方向。
7.如果在齿轮传动中,其中有一个齿轮和它的 绕另一个 旋转,则这轮系就叫周转轮系。
8.旋转齿轮的几何轴线位置均 的轮系,称为定轴轮系。
9.轮系中 两轮 之比,称为轮系的传动比。
10.加惰轮的轮系只能改变 的旋转方向,不能改变轮系的 。
11.一对齿轮的传动比,若考虑两轮旋转方向的同异,可写成±==21n n i ——。
12.定轴轮系的传动比,等于组成该轮系的所有 轮齿数连乘积与所有 轮齿数连乘积之比。
13.在周转转系中,凡具有 几何轴线的齿轮,称中心轮,凡具有 几何轴线的齿轮,称为行星轮,支持行星轮并和它一起绕固定几何轴线旋转的构件,称为 。
14.周转轮系中,只有一个 时的轮系称为行星轮系。
15.转系可获得 的传动比,并可作 距离的传动。
16.转系可以实现 要求和 要求。
17.转系可以 运动,也可以 运动。
18.采用周转轮系可将两个独立运动 为一个运动,或将一个独立的运动 成两个独立的运动。
19.差动轮系的主要结构特点,是有两个。
20.周转轮系结构尺寸,重量较。
21.周转轮系可获得的传动比和的功率传递。
三、判断题1.转系可分为定轴轮系和周转轮系两种。
习 题 答 案8-1 如图,已知轮系中各轮齿数, Z 1=20, Z 2=50, Z 2‘= 15, Z 3=30 ,Z 3‘=1 , Z 4= 40, Z 4’= 18 , Z 5= 54 ,求i 15和提起重物时手轮转向? 解:600181152054403050''3'215432154=⨯⨯⨯⨯⨯⨯==Z Z Z Z Z Z Z Z i转向如图所示。
题8-1图8-2已知轮系中各轮齿数, Z 1=27,Z 2=17,Z 3=99,n 1=6000r/min,求i 1H 和n H 。
解:-313313113==--==n z z n n n n n n i H HH HH26.311311=+==Z Z n n i H H 设n 1转向为正,则111,min /184026.36000n n r i n n H H H ===8-3如图所示的外啮合周转轮系中,已知Z 1=100, Z 2=101, Z 2'=100, Z 3=99,求系杆H 与齿轮1之间的传动比i H 1。
解:213223113)1(Z Z Z Z i H HH-=--=ωωωω代入上式03=ω100100991011'21321⨯⨯=⨯⨯=-Z Z Z Z H ωω 100001100009999111=-==H H i ωω 1000011==∴ωωHH i 8-4 图示圆锥齿轮组成的周转轮系中,已知Z 1=20, Z 2=30, Z 2‘=50, Z 3=80,n 1=50r/min. 求系杆H 转速。
题8-4图解:'213231Z Z Z Z n n n n H H ⨯⨯-=-- 等式右边的符号是在转化轮系中确定的。
设n1转向为正,则 50208030050⨯⨯-=--H H n n min /7.14r n H =∴ 与n1转向相同,方向的判定如图所示。
8-5 如图为标准圆柱直齿轮传动系统,已知Z 1=60, Z 2=20, Z 2‘=25,各轮模数相等,求:1)Z 3;2)若已知n 3=200r/min, n 1=50r/min, n 3,n 1转向如图,求系杆H 转速大小和方向; 3)若n 1方向与图中相反时,则系杆H 转速大小和方向如何? 解:1)首先根据同心条件求出Z 3)(21)(213'221Z Z m Z Z m +=- 153=Z 2)'21323113Z Z Z Z n n n n i H H H⨯⨯-=--=2560152020050⨯⨯-=--H H n n min /75r n H =∴ 转向与n1一致3)当n1方向相反时,以-50r/min 代入,则2560152020050⨯⨯-=---H H n n min /33.8r n H -=∴ min /33.8r n H -=∴转向与n1一致8-6 图示轮系中,已知各轮齿数为Z 1=60,Z 2=20,Z 2‘=20,Z 3=20,Z 4=20,Z 5=100,试求传动比i 41。