6.《极坐标系--圆的极坐标方程》
- 格式:ppt
- 大小:102.00 KB
- 文档页数:12
圆方程化极坐标一、介绍在数学中,极坐标是一种描述平面上点位置的方式,它以点到原点的距离(称为极径)和点与正半轴的夹角(称为极角)来表示点的位置。
圆方程化极坐标指的是将圆的方程表达式转换为极坐标形式。
本文将深入探讨圆的方程在极坐标系下的表示方法及其应用。
二、圆的方程圆的常见方程为(x−x0)2+(y−y0)2=r2,其中(x0,y0)为圆心坐标,r为半径。
现在我们来考虑如何将这个方程转换为极坐标系下的表示形式。
三、极坐标系下的表示在极坐标系下,点的位置由极径和极角来确定。
我们可以使用极坐标转换公式x= r⋅cos(θ)和y=r⋅sin(θ)来将直角坐标系中的变量转换为极坐标系下的变量。
考虑圆心在原点的情况,我们有x=r⋅cos(θ)和y=r⋅sin(θ)。
将这两个式子代入圆的方程(x−x0)2+(y−y0)2=r2中,可以得到:(r⋅cos(θ))2+(r⋅sin(θ))2=r2经过化简,最终可得圆在极坐标系下的方程形式:r2=r2⋅cos2(θ)+r2⋅sin2(θ)通过进一步化简,我们可以得到更简洁的极坐标下的圆方程:r2=r2这个结果非常有趣,因为它表明在极坐标系下,圆的方程仅仅是一个恒等式。
换句话说,在极坐标系下,圆的方程对于所有的r和θ都成立。
这是因为极坐标系是以圆心为中心的,所以圆的方程在该坐标系下总是成立的。
四、应用极坐标方程的推导虽然简洁,但它在实际应用中非常重要。
以下是一些应用示例:1. 绘制圆的图形在极坐标系下,我们可以使用参数方程r=a来绘制圆。
其中a为半径,r为极径。
参数方程表示了通过参数化的方式绘制图形,通过改变参数t的值,我们可以绘制不同的圆。
2. 解决极坐标下的问题在某些问题中,使用极坐标系比直角坐标系更加方便。
例如,极坐标系可以简化极坐标方程的求解过程,使得解题更加简单和直观。
3. 研究极坐标下的关系在数学研究中,极坐标方程可以帮助我们更好地理解圆和其它曲线的性质。
圆的极坐标方程和参数方程1. 圆的极坐标方程圆是平面上距离一个固定点(圆心)相等的点的集合。
在极坐标系中,可以用极径和极角来表示点的位置。
对于一个以原点为圆心的圆,其极径为常数r,极角为θ。
假设圆心到某一点P的距离为d,则有d=r。
根据三角函数关系,可以得到如下关系式:x = r * cos(θ)y = r * sin(θ)将这两个关系式整合起来,就可以得到圆的极坐标方程:r = √(x^2 + y^2)θ = atan2(y, x)其中,atan2(y, x)是反正切函数,返回以弧度表示的角度值。
2. 圆的参数方程除了使用极坐标来表示圆外,还可以使用参数方程来表达。
参数方程是指将x和y分别表示为与另一个变量t有关的函数。
对于一个以原点为圆心的圆,其参数方程可以表示为:x = r * cos(t)y = r * sin(t)其中r是半径,t是参数变量。
通过改变t的取值范围(通常是从0到2π),可以绘制出整个圆的轨迹。
3. 极坐标方程与参数方程的联系极坐标方程和参数方程是等价的,可以通过互相转换来表示同一个圆。
将极坐标方程转换为参数方程,只需将x和y用r和θ表示:x = r * cos(θ) = r * cos(t)y = r * sin(θ) = r * sin(t)将参数方程转换为极坐标方程,只需将r和t用x和y表示:r = √(x^2 + y^2)θ = atan2(y, x)因此,无论使用哪种方式,都可以准确地描述圆的形状和位置。
4. 圆的应用圆是数学中最基本、最简单且最重要的几何形状之一。
它在各个领域都有广泛的应用。
4.1 几何学在几何学中,圆是许多定理和性质的基础。
例如,圆是平面上所有点到一个固定点(圆心)距离相等的集合,这一性质被称为圆的定义。
根据这个定义,可以推导出许多重要定理,如切线定理、弦切角定理等。
4.2 物理学在物理学中,圆的运动是一个重要的研究对象。
例如,质点在平面上做匀速圆周运动时,可以用参数方程来描述其位置随时间的变化。
圆的极坐标方程圆是平面坐标系中最常见的几何图形,它被广泛应用于工程、科学、艺术及实际生活中。
我们知道,圆的极坐标方程是用极坐标来描述圆的一种方法,它把圆的位置和形状表示为极坐标形式的函数,从而可以用极坐标有效地表示出整个平面坐标系中的圆。
圆的极坐标方程定义如下:圆心为原点(0,0),圆半径为r,圆上任意一点(x,y),则存在实数θ满足:x = rcosθy = rsinθ以上方程就是圆的极坐标方程,其中r表示圆的半径,θ表示圆上任意一点的极角,其中0≤θ≤2π,当极角θ发生变化时,对应的圆上任意点发生变化,这样就可以遍历整个圆的所有点。
此外,圆的极坐标方程也与平面坐标系有着密切的关系,假设圆上任意一点(x,y),则其直角坐标可以根据圆的极坐标方程求出:x = rcosy = rsin则有:x = rcos=> x = rcos(arcos(x/r) )=> cos(arcos(x/r)) = x/ry = rsin=> y = rsin(arcsin(y/r))=> sin(arcsin(y/r)) = y/r所以,圆的极坐标方程中的实参θ可以由直角坐标中的实参x和y求出,即:θ = arctan ( y/x )从上面可以看出,当圆上任意一点的极角θ发生变化时,其直角坐标也会发生变化,这就是圆的极坐标方程与平面坐标系之间的密切联系。
另外,圆的极坐标方程也可以用来求解圆的面积及周长,假设圆半径r,则圆的面积为:S =r^2而圆的周长为:C = 2πr以上就是圆的极坐标方程的数学表示,从其可以看出,圆的极坐标方程既与平面坐标系有着密切联系,也可以用来求解圆的面积及周长,这一特性使得圆的极坐标方程在工程、科学、艺术及实际生活中得到了广泛应用。
总之,圆的极坐标方程是圆的一种表示方法,通过它,我们可以有效地把圆的位置和形状表示出来,而圆的极坐标方程又与平面坐标系有着密切联系,可以用来求解圆的面积及周长,这些优越的特性使得圆的极坐标方程得到广泛应用。
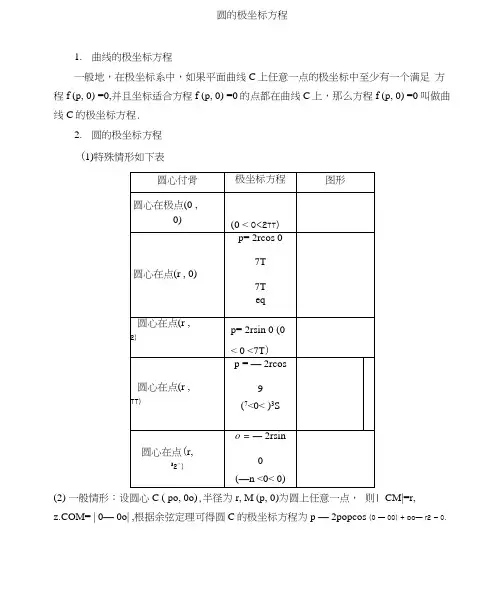
圆的极坐标方程1.曲线的极坐标方程一般地,在极坐标系中,如果平面曲线C上任意一点的极坐标中至少有一个满足方程f (p, 0) =0,并且坐标适合方程f (p, 0) =0的点都在曲线C上,那么方程f (p, 0) =0叫做曲线C的极坐标方程.2.圆的极坐标方程(1)特殊情形如下表(2) 一般情形:设圆心C ( po, 0o),半径为r, M (p, 0)为圆上任意一点,则| CM|=r,= | 0— 0o| ,根据余弦定理可得圆C的极坐标方程为p — 2popcos (0 — 00) + po— r2 = 0.o1. 极坐标方程p = 4表示的曲线是()A.过(4, 0)点,且垂直于极轴的直銭 •过(2, 0)点,且垂直于极轴的直线C.以(4, 0)为圆心,半径为4的圆D ・以极点为圆心,半径为4的圆 解析:选D.由极坐标方程的定义可知,极坐标方暗4表示以极点为圆心,以4为 半径的圆.2. 圆心在(1, 0)且过极点的圆的极坐标() A. p= 1 B p= cos 0 C p=2cos°D ・ p=2sin8解析:选C.经过极点0且半径为3的圆的极坐标方程为p=2acos0,因圆心在(1 ,0),所以半径为1,所以极坐标方程为p-2cos0,故选C. 2所以 P 2= 22p COS 0+ 22 p sin 0,即 x 2 + y^=22x+ 2y ・2 2 2 2 ]_化简整理得X — 2 + y — 2 =,表不圆.选D ・ 4 4 44.极坐标方程p=2cos8表示的曲线所围成的面积为 __________ ・解析:由p = 2cos 8 = 2xlxcos 8知,曲线表示圆,且圆的半径r 为1, 所以面积S=irr =冗・ 答案:u圆的极坐标方程3TT求圆心在C 2, 2处并且过极点的圆的极坐标方程,并判断点是否在这个圆上.[解]如图,由题意知,圆经过极点0, 0A 为其一条直径,设M (p, 0)为圆上 除点0,A 以外的任意一点,贝IJ | 0A| -2r ,连接AM,则0M 丄MA.3.极坐标方p=cos4 —°表示的曲线是()-rr-i・椭A.双曲线 B 闾C.抛物线解析:选D.pTTcos K4 —0IT =cos cos 0+sin AD ・圆K4 sin 0 = 22COS 0 + 22sin 0,5TT—2, sin 6在RtA OAM 中,| 0M| =| OA|cos zAOM,即p= 2r cos 2 —0所以p=—4sin8,经验证,点0 (0, 0) , A4,务兀的坐标满足上式. 所以满足条件的圆的极坐标方程为p = —4sin8. (1)因为sin肓O 2,._ 5TT所以p = —4sin = — 4sin — 2,5TT所以点一2, sin V在此圆上.求曲线的极坐标方程的五个步骤(1)建立适当的极坐标系(本题无需建);(2)在曲线上任取一点M (p, 0) ; (3)根据曲线上的点所满足的条件写出等式;(4)用极坐标(p, 0)表示上述等式,并化简得曲线的极坐标方程;(5)证明所得的方程是曲线的极坐标方程.(一般只要对特殊点加以检验即可)・[注意]求曲线的极坐标方程,关键要找出曲线上的点满足的几何条件,并进行坐标表示.求圆心在C 2, 4,半径为1的圆的极坐标方程.解:设圆C上任意一点的极坐标为M (p, 0),如图,在厶OCM中,由余弦定理,得222| 0M| 2 + | 0C| 2 —2|OM|・|OC|・COSZ COM=|CM|2,即p2— 2 2pcos 0— 4 +1 = 0.当0, C, M三点共线时,TT圆的极坐标方程与直角坐标方程的互化进行直角坐标方程与极坐标方程的互化:2 2 2 ⑴ y2=4x;(2) x2+y2 —2x—1= 0;⑶p 2 — cos 0 [解]⑴ 将x= pcos 0, y= psin 0 代入y2= 4x, 2得(psin 0] =4pcos 0.2化简,彳專p sin 20= 4cos 0.(2)将x= p cos 0, y=psin 0 代入y +x — 2x —1 = 0,22得(psin 0) 2+(pcos 0) 2 —2pcos 0 — 1=0,化简,得p — 2pcos 0 — 1= 0. (3)SM1P2_C0S所以2p— pcos 0 = 1.所以2 x2 + y2— x= 1.化简,得3x2 + 4y2 —2x— 1=0.在进行两种坐标方程间的互化时应注意的问题(1)互化公式是有三个前提条件的,即极点与直角坐标系的原点重合、极轴与直角坐标系的横轴的正半轴重合,两种坐标系的单位长度相同.(2)由直角坐标求极坐标时,理论上不是唯一的,但这里约定只在0< 0<2u范围内求值.(3)由直角坐标方程化为极坐标方程,最后要注意化简.(4)由极坐标方程化为直角坐标方程时要注意变形的等价性,通常要用p去乘方程的两端,应该检查极点是否在曲线上,若在,是等价变形,否则,不是等价变形.1.把下列直角坐标方程化为极坐标方程.(1) y= 3x; (2) x2— y2= 1.解:(1)将x= pcos 0, y=psin 0 代入y = 3x 得psin 8= 3pcos 8,从而(2)将火=p cos 0, y=psin 0 代入x2—y2 = 1, 得p2cos20 —p2sin 20= 1,2・把下列极坐标方程化为直角坐标方程.2⑴ p2cos 2 8= 1;TT(2) p= 2cos 0—4・2解:(1)因为p2cos2 8=l,所以p2cos20 —p2sin 20 =1.所以化为直角坐标方程为x2—y2=1.(2)因为p = 2cos 0cos 4 +2sin 0sin 4 = 2cos 0+ 2sin 0,所以p2= 2 pcos 0 + 2p sin 0 ・所以化为直角坐标方程为x2+ y2— 2x— 2y = 0. 求相关动点的极坐标方程从极点0作圆C: p= 2acos 0的任意一条弦ON,求各弦的中点M的极坐标方程.[解]法一:如图所示,圆C的圆心C (a, 0),半径r = |OC| = a,因为M为弦ON的中点,连接CM•所以CM丄ON,故M在以0C为直径的圆上,所以动点M的极坐标方程是p= acos 0.法二:设M (p, 8) , N (pi, 01)・因N 点在圆p= 2acos 0 上,pi= 2acos 0i.①为M是ON的中点,pi=2p, 01=0・所将它代入①式得2p = 2acos 0,故M的极坐标方程是p= acos 0.将本例中以所求得的中点M的极坐标方程化为直角坐标方程.I大I解:因为p =acos 0,所以p2= a- pcos 0,所以x2+y2= ax, 所以中点M的直角坐标方程为x2+y2—ax= 0.本例所涉及的问题有相关的两个动点,其中一个动点的轨迹方程已知,求另一个动点的轨迹方程.求解时找出等量关系,代入化简即可.0P2从极点0引定圆p=2cos8的弦OP,延长OP到Q使PQ= 3,求点Q的极坐标方程,并说明所求的轨迹是什么图形?p2 2 解:设Q(P,0) , P ( po, 00),则0 = 00, =,所以po= p,因为po =p— p° 3 52cos 0o.所以p= 2cos 0,即p= 5cos 0,它表示一个圆.5解析:选C ・如图所示.设M(p, 0)是圆上点,则上ONMZ MOx= e , 在 RtZkNMO 中,I 0M| =| ON|sinzONM, 即 p = 2rsin 8= asin 0.3. 把圆C 的极坐标方程p=2cos8转化为直角坐标方程为 ______________ ,圆心的直角坐标为 ______ ・解析:因为 p = 2cos8,所以 p2 = 2pcosB,将 p 2= x 2+y 2, x= pcos 8 代入得 直角坐标方程为x2+y2 = 2x,其圆心坐标为(1, 0)・答案:x?+y2 = 2x (1 , 0)4. 写出圆心在(1, -1)处,且过原点的圆的极坐标方程.解:圆的半径为r=2,圆的直角坐标方程为(x-1) 2+ (y+1) 2 = 2. 变形得x2+y2 = 2 (x-y),用坐标互化公式得p2 = 2 (pcos 0 —psin 0), 即 p = 2cos 0— 2sin 0 ・[A 基础达标]1・在极坐标系中圆心在(2,冗)且过极点的圆的方程为() A. p= 2 2cos p = _ 2 2sin解析:选B ・如图所示,P(2:),在圆上任找一点M (p 。
圆的极坐标方程在极坐标系中,如果平面曲线C上任意一点的极坐标中至少有一个满足方程$f(\rho,\theta)=0$,并且坐标适合方程$f(\rho,\theta)=0$的点都在曲线C上,那么方程$f(\rho,\theta)=0$叫做曲线C的极坐标方程。
对于圆的极坐标方程,有以下特殊情形:1) 圆心在极点(0,0)时,极坐标方程图形为$\rho=r$,其中$0\leq\theta<2\pi$。
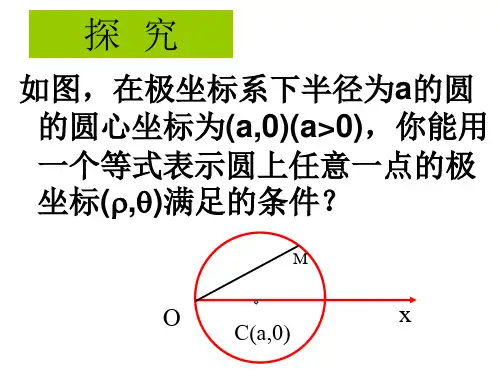
2) 圆心在点$(r,0)$时,极坐标方程图形为$\rho=2r\cos\theta$,其中$-\pi\leq\theta<\pi$。
3) 圆心在点$(r,\frac{\pi}{2})$时,极坐标方程图形为$\rho=2r\sin\theta$,其中$0\leq\theta<\frac{\pi}{2}$。
4) 圆心在点$(r,\pi)$时,极坐标方程图形为$\rho=-2r\cos\theta$,其中$\pi\leq\theta<\frac{3\pi}{2}$。
5) 圆心在点$(r,-\frac{\pi}{2})$时,极坐标方程图形为$\rho=-2r\sin\theta$,其中$-\frac{\pi}{2}<\theta\leq 0$。
对于一般情形,设圆心为C$(\rho,\theta)$,半径为$r$,M$(\rho,\theta)$为圆上任意一点,则$|CM|=r$,$\angleCOM=|\theta-\theta|$,根据余弦定理可得圆C的极坐标方程为$\rho^2-2\rho r\cos(\theta-\theta)+r^2=0$。
例如,极坐标方程$\rho=4$表示以极点为圆心,以4为半径的圆。
又例如,过极点且圆心为$(1,0)$的圆的极坐标方程为$\rho=2\cos\theta$。
极坐标方程$\rho=\cos\frac{\pi}{4}$表示以极点为圆心,以$\frac{1}{\sqrt{2}}$为半径的圆。
圆的认识•圆的定义:圆是一种几何图形。
当一条线段绕着它的一个端点在平面内旋转一周时,它的另一个端点的轨迹叫做圆。
在一个个平面内,线段OA绕它固定的一个端点O旋转一周,另一个端点A随之旋转所形成的图形叫做圆,固定的端点O叫做圆心,线段OA叫做半径。
相关定义:1 在同一平面内,到定点的距离等于定长的点的集合叫做圆。
这个定点叫做圆的圆心。
图形一周的长度,就是圆的周长。
2 连接圆心和圆上的任意一点的线段叫做半径,字母表示为r。
3 通过圆心并且两端都在圆上的线段叫做直径,字母表示为d。
直径所在的直线是圆的对称轴。
4 连接圆上任意两点的线段叫做弦。
最长的弦是直径,直径是过圆心的弦。
5 圆上任意两点间的部分叫做圆弧,简称弧。
大于半圆的弧称为优弧,优弧是用三个字母表示。
小于半圆的弧称为劣弧,劣弧用两个字母表示。
半圆既不是优弧,也不是劣弧。
优弧是大于180度的弧,劣弧是小于180度的弧。
6 由两条半径和一段弧围成的图形叫做扇形。
7 由弦和它所对的一段弧围成的图形叫做弓形。
8 顶点在圆心上的角叫做圆心角。
9 顶点在圆周上,且它的两边分别与圆有另一个交点的角叫做圆周角。
10 圆周长度与圆的直径长度的比值叫做圆周率。
它是一个无限不循环小数,通常用π表示,π=3.14159265……在实际应用中,一般取π≈3.14。
11圆周角等于相同弧所对的圆心角的一半。
12 圆是一个正n边形(n为无限大的正整数),边长无限接近0但不等于0。
圆的集合定义:圆是平面内到定点的距离等于定长的点的集合,其中定点是圆心,定长是半径。
•圆的字母表示:以点O为圆心的圆记作“⊙O”,读作O”。
圆—⊙;半径—r或R(在环形圆中外环半径表示的字母);弧—⌒;直径—d ;扇形弧长—L ;周长—C ;面积—S。
圆的性质:(1)圆是轴对称图形,其对称轴是任意一条通过圆心的直线。
圆也是中心对称图形,其对称中心是圆心。
垂径定理:垂直于弦的直径平分这条弦,并且平分弦所对的2条弧。
圆的极坐标方程及圆心半径的表示最新文档(可以直接使用,可编辑最新文档,欢迎下载)圆的极坐标方程及圆心、半径的表示圆心为C(00,θρ),且半径为R的圆的极坐标方程是圆心在极点,半径为a(a>0)的圆的极坐标方程是ρ=a .圆心在C(a , 0)(a>0)且过极点的圆的极坐标方程是ρ=2acosθ.圆心在(a,p )(a>0)且过极点的圆的极坐标方程是r=-2acosq向量的坐标表示及其运算【知识概要】1. 向量及其表示1)向量:我们把既有大小又有方向的量叫向量(向量可以用一个小写英文字母上面加箭头来表示,如读作向量,向量也可以用两个大写字母上面加箭头来表示,如AB ,表示由到的向量.为向量的起点,为向量的终点).向量AB (或)的大小叫做向量的模,记作AB (或a ).注:① 既有方向又有大小的量叫做向量,只有大小没有方向的量叫做标量,向量与标量是两种不同的量,要加以区别;② 长度为0的向量叫零向量,记作的方向是任意的注意与0的区别 ③ 长度为1个单位长度的向量,叫单位向量.说明:零向量、单位向量的定义都是只限制大小,不确定方向.例1 下列各量中不是向量的是( D )A.浮力B.风速C.位移D.密度 例2 下列说法中错误..的是( A ) A.零向量是没有方向的B .零向量的长度为0C.零向量与任一向量平行D.零向量的方向是任意的例 3 把平面上一切单位向量的始点放在同一点,那么这些向量的终点所构成的图形是( D ) A.一条线段B .一段圆弧 C.圆上一群孤立点 D.一个单位圆2)向量坐标的有关概念① 基本单位向量: 在平面直角坐标系中,方向分别与轴和轴正方向相同的两个单位向量叫做基本单位,记为和.② 将向量的起点置于坐标原点,作OA a =,则叫做位置向量,如果点的坐标为(,)x y ,它在轴和轴上的投影分别为,M N ,则,.OA OM ON a OA xi y j =+==+③向量的正交分解在②中,向量能表示成两个相互垂直的向量、分别乘上实数,x y 后组成的和式,该和式称为、的线性组合,这种向量的表示方法叫做向量的正交分解,把有序的实数对(,)x y 叫做向量的坐标,记为=(,)x y .一般地,对于以点111(,)P x y 为起点,点222(,)P x y 为终点的向量12PP ,容易推得122121()()PP x x i y y j =-+-,于是相应地就可以把有序实数对2121(,)x x y y --叫做12PP 的坐标,记作12PP =2121(,)x x y y --. 3)向量的坐标运算:1122(,),(,)a x y b x y ==,R λ∈则1212121212(,);(,);(,)a b x x y y a b x x y y a x x λλλ+=++-=--=. 4) 向量的模:设(,)a x y =,由两点间距离公式,可求得向量的模()norm .2a x y =+注:① 向量的大小可以用向量的模来表示,即用向量的起点与终点间的距离来表示; ② 向量的模是个标量,并且是一个非负实数.例4 已知点的坐标为(2,0),点的坐标为(3,0)-,且4,3AP BP ==,求点的坐标. 解:点的坐标为612(,)55-或 612(,)55--. 例5 已知2(4,3),2(3,4)a b a b +=--=,求、的坐标. 解:(1,2),(2,1)a b =-=-- 例6 设向量,,,,a b c R λμ∈,化简:(1)()()()()a b c a b c b c λμμλμλ+--+-+--; (2)2()(22)2a b c a b c λμλμλμμ+--++.解:都为.2. 向量平行的充要条件平行向量:方向相同或相反的非零向量叫平行向量(我们规定0与任一向量平行). 已知与为非零向量,若1122(,),(,)a x y b x y ==,则//a b 的充要条件是1221x y x y =,所以,向量平行的充要条件可以表示为:1221//().a b a b x y x y λλ⇔=⇔=其中为非零实数例7 已知向量(2,3)a =-,点(2,1)A -,若向量AB 与平行,且213AB =,求向量OB 的坐标.解:OB 的坐标为(6,7)- 或(2,5)-.3. 定比分点公式1)定比分点公式和中点公式①12,P P 是直线l 上的两点,是l 上不同于12,P P 的任一点,存在实数, 使P P 1=2PP λ,叫做点分21P P 所成的比,有三种情况:(内分)>0(外分) <-1 (外分)-1<<0② 已知111(,)P x y 、222(,)P x y 是直线上任一点,且P P 1=2PP λ(,1)R λλ∈≠.是直线12P P 上的一点,令(,)P x y ,则121211x x x y y y λλλλ+⎧=⎪⎪+⎨+⎪=⎪+⎩,这个公式叫做线段12P P的定比分点公式,特别地1λ=时,为线段12P P 的中点,此时121222x x x y y y +⎧=⎪⎪⎨+⎪=⎪⎩,叫做线段12P P 的中点公式. 注:①12PP PP λ=⋅可得12PP PP λ=±⋅;②当1λ=-时,定比分点的坐标公式121x x x λλ+=+和121y y y λλ+=+显然都无意义,也就是说,当1λ=-时,定比分点不存在2)三角形重心坐标公式设ABC ∆的三个点的坐标分别为112233(,),(,),(,)A x y B x y C x y ,为ABC ∆的重心,则12312333G G x x x x y y y y ++⎧=⎪⎪⎨++⎪=⎪⎩例8 在直角坐标系内12(4,3),(2,6)P P --,点在直线12P P 上,且122PP PP =,求出的坐标.解:当在12P P 上时,(0,3)P ;当在12P P 延长线上,(8,15)P -.例9 已知(3,1),(4,2)A B ---,是直线AB 上一点,若23AP AB =,求点的坐标. 解: 注意定比分点的定点,可得155(,)22P --.*方法提炼*几个重要结论1. 若,a b 为不共线向量,则a b +,a b -为以,a b 为邻边的平行四边形的对角线的向量;2. 22222()a b a b a b ++-=+;3. 为ABC ∆的重心0GA GB GC ⇔++=123123(,)33x x x y y y G ++++⇔ 112233[(,),(,)(,)]A x y B x y C x y【基础夯实】1.判断下列命题是否正确,若不正确,请简述理由.①向量AB 与CD 是共线向量,则A 、B 、C 、D 四点必在一直线上; ②单位向量都相等;③任一向量与它的相反向量不相等;④四边形ABCD 是平行四边形的充要条件是AB =DC ⑤模为0是一个向量方向不确定的充要条件;⑥共线的向量,若起点不同,则终点一定不同.解:①不正确.共线向量即平行向量,只要求方向相同或相反即可,并不要求两个向量AB 、AC 在同一直线上.②不正确.单位向量模均相等且为1,但方向并不确定.③不正确.零向量的相反向量仍是零向量,但零向量与零向量是相等的. ④、⑤正确.⑥不正确.如图AC 与BC 共线,虽起点不同,但其终点却相同.评述:本题考查基本概念,对于零向量、单位向量、平行向量、共线向量的概念特征及相互关系必须把握好.2.下列命题正确的是( C )A.a与b共线,b与c共线,则a与c 也共线B.任意两个相等的非零向量的始点与终点是一平行四边形的四顶点C.向量a与b不共线,则a与b都是非零向量D.有相同起点的两个非零向量不平行3.在下列结论中,正确的结论为( D ) (1)a ∥b 且|a |=|b |是a =b 的必要不充分条件(2)a ∥b 且|a |=|b |是a =b 的既不充分也不必要条件 (3)a 与b 方向相同且|a |=|b |是a =b 的充要条件(4)a 与b 方向相反或|a |≠|b |是a ≠b 的充分不必要条件 A. (1)(3) B. (2)(4) C. (3)(4) D. (1)(3)(4) 4. 已知点A 分有向线段BC 的比为2,则在下列结论中错误的是( D )A. 点C 分AB 的比是-31B.点C 分的比是-3 C 点C 分AC 的比是-32D 点A 分的比是25.已知两点1(1,6)P --、2(3,0)P ,点7(,)3P y -分有向线段21P P 所成的比为,则、的值为( C )A -41,8 B.41,-8 C -41,-8 D 4,816.△ABC 的两个顶点A(3,7)和B(-2,5),若AC 的中点在x 轴上,BC 的中点在y 轴上,则顶点C 的坐标是( A )A (2,-7)B (-7,2)C (-3,-5)D (-5,-3)7. “两个向量共线”是“这两个向量方向相反”的条件. 答案:必要非充分8.已知a 、b 是两非零向量,且a 与b 不共线,若非零向量c 与a 共线,则c 与b 必定. 答案:不共线9.已知点A(x,2),B(5,1),C(-4,2x)在同一条直线上,那么x= 答案:2或2710.△ABC 的顶点A(2,3),B(-4,-2)和重心G(2,-1),则C 点坐标为 答案:(8,-4)11. 已知M 为△ABC 边AB 上的一点,且18AMC ABC S S ∆∆=,则M 分AB 所成的比为 答案:71【巩固提高】12.已知点(1,4)A =--、(5,2)B ,线段AB 上的三等分点依次为、,求、点的坐标以及,A B 分21P P 所成的比.解:P 1(1,-2),P 2(3,0),A 、B 分21p p 所成的比λ1、λ2分别为-21,-213. 过1(1,3)P 、2(7,2)P 的直线与一次函数5852+=x y 的图象交于点,求分21P P 所成的比值解:12514. 已知平行四边形ABCD 一个顶点坐标为A(-2,1),一组对边AB 、CD 的中点分别为M(3,0)、N(-1,-2),求平行四边形的各个顶点坐标 解:B(8,-1),C(4,-3),D(-6,-1)15. 设是ABC ∆所在平面内的一点,2BC BA BP +=,则( B ) (A).0PA PB += (B).0PC PA += (C).0PB PC += (D).+0PA PB PC +=16. 若平面向量,a b 满足1,a b a b +=+平行于轴,(2,1)b =-,则(1,1)(3,1)a =--或.17.在△ABC 中,点P 在BC 上,且BP →=2PC →,点Q 是AC 的中点.若P A →=(4,3),PQ →=(1,5),则BC →等于( )A .(-6,21)B .(-2,7)C .(6,-21)D .(2,-7)解析:选A.AC →=2AQ →=2(PQ →-P A →)=(-6,4),PC →=P A →+AC →=(-2,7),BC →=3PC →=(-6,21).18.已知O 为坐标原点,向量(2,),(,1),(5,1).OA m OB n OC =-==-若A,B,C 三点共线,且2m n =,求实数,m n 的值19.已知点A(3,0),B(-1,-6), P 是直线AB 上一点,且1||||3AP AB =,求点P 的坐标.20. 已知向量(cos ,sin )m θθ=和(2sin ,cos ),(,2)n θθθππ=-∈,且8||25m n +=,求cos()28θπ+的值。
圆方程极坐标和直角坐标的互化在数学中,极坐标和直角坐标是表示平面上点位置的两种不同方式。
圆的方程可以通过极坐标和直角坐标分别表示,两种表示方式之间存在着互化的关系。
极坐标表示下的圆方程在极坐标系中,一个点的位置由它到原点的距离和与极轴的夹角表示。
对于圆来说,它的极坐标方程可以表示为:r=a其中,r表示距离原点的距离,a表示圆的半径。
直角坐标表示下的圆方程在直角坐标系中,一个点的位置由它在x轴和y轴上的坐标表示。
对于圆来说,它的直角坐标方程可以表示为:(x−ℎ)2+(y−k)2=a2其中,(ℎ,k)表示圆心的坐标,a表示圆的半径。
极坐标和直角坐标的互化由圆的定义可知,对于任意一个点(x,y),它的极坐标和直角坐标的表示应该是等价的。
因此,我们可以通过互化的方式将一个坐标系下的圆方程转换为另一个坐标系下的圆方程。
极坐标转直角坐标对于一个以原点为圆心的圆,我们可以根据极坐标方程r=a进行转换。
由于$x = r \\cdot \\cos(\\theta)$,$y = r \\cdot \\sin(\\theta)$,代入r=a,可以得到:$x = a \\cdot \\cos(\\theta)$$y = a \\cdot \\sin(\\theta)$直角坐标转极坐标同样地,对于一个圆,我们可以根据直角坐标方程(x−ℎ)2+(y−k)2=a2进行转换。
将x和y的值代入,可以得到:r2=(x−ℎ)2+(y−k)2利用直角坐标系下的勾股定理,可以得到:r2=x2−2ℎx+ℎ2+y2−2ky+k2再利用r2=x2+y2,可以得到:r2=x2+y2=2ℎx−ℎ2+2ky−k2+a2r2=2ℎx+2ky+a2−ℎ2−k2由此得到极坐标方程:$r = \\sqrt{2hx + 2ky + a^2 - h^2 - k^2}$例子假设有一个以极坐标方程r=3表示的圆,我们可以将其转换为直角坐标系下的方程。
根据极坐标转直角坐标的转换公式,我们可以得到:$x = 3 \\cdot \\cos(\\theta)$$y = 3 \\cdot \\sin(\\theta)$反之,如果有一个以直角坐标方程(x−2)2+(y−2)2=9表示的圆,我们可以将其转换为极坐标系下的方程。
圆的极坐标方程与直角坐标方程的转化你有没有想过,数学里的圆就像一位沉默的老朋友,默默地在平面上转悠。
说到圆,很多人第一反应可能是直角坐标系里的方程,比如 ( x^2 + y^2 = r^2 )。
不过,今天咱们来聊聊另一种方式——极坐标系。
极坐标系就像是从不同的角度看待这个老朋友的一种方式。
先别急着打瞌睡,这其中有不少有趣的东西等着我们发掘呢!1. 极坐标与直角坐标的基础知识1.1 极坐标系:啥玩意儿?极坐标系,它跟直角坐标系不一样,咱们不是用 (x) 和 (y) 来定位点,而是用一个角度和一个距离。
可以把它想象成,你站在一个中心点上(我们通常把它叫原点),然后用一个测角器来测你与某个点之间的夹角,以及一根尺子来量这点离你有多远。
这样,你就能通过两个数值来定位这个点了。
这两个数值分别是半径 (r)(表示距离原点的距离)和角度 (theta)(表示与x轴的夹角)。
1.2 直角坐标系的圆方程:说说简单的在直角坐标系里,圆的方程是 (x^2 + y^2 = r^2),是不是特别简单?这里 (r) 是圆的半径,( (x, y) ) 是圆上任意一点的坐标。
看似简单,但这就是圆的经典方程,告诉我们所有圆上点的关系:每个点到圆心的距离都是一样的。
2. 极坐标下的圆2.1 极坐标下的圆方程在极坐标系里,圆的方程看起来要复杂一点,但其实很有趣。
假如圆心在原点,那这个圆的极坐标方程就特别简单,就是 (r = R),其中 (R) 是圆的半径。
哇,这是不是挺直观的?意思就是,无论你站在什么角度,离圆心的距离都固定为 (R) 呢。
不过,要是圆心不在原点,那就有点小复杂了。
比如圆心在极坐标里的 ( (a, alpha) ) 这个位置,这时候圆的极坐标方程就得用到三角函数来转换了。
方程会是: ( r^2 2ar cos(theta alpha) = R^2 a^2 )。
听起来像是个数学游戏,但其实背后的原理就像是调整视角来重新定义你看到的圆的位置。
圆的直角坐标方程化为极坐标方程详细步骤圆的直角坐标方程示例
一个圆在直角坐标系中可以用方程表示为:(x−a)2+(y−b)2=r2,其中(a,b)是圆心坐标,r是圆的半径。
圆的极坐标方程求解步骤
1.将直角坐标表示转换为极坐标表示
首先,我们将圆的直角坐标方程用极坐标代替。
在极坐标系中,点(x,y)可以
表示为$(r,\\theta)$,其中r是极径,$\\theta$是极角。
2.将直角坐标系中的x和y转换为极坐标系中的r和$\\theta$
在直角坐标系中,$x = r\\cos(\\theta)$,$y = r\\sin(\\theta)$。
将该关系带
入圆的直角坐标方程,得到:$(r\\cos(\\theta) - a)^2 + (r\\sin(\\theta) - b)^2 =
r^2$。
3.化简圆的极坐标方程
展开上式后可得:$r^2\\cos^2(\\theta) - 2ar\\cos(\\theta) + a^2 +
r^2\\sin^2(\\theta) - 2br\\sin(\\theta) + b^2 = r^2$。
化简后,得到:$r^2 - 2ar\\cos(\\theta) - 2br\\sin(\\theta) + a^2 + b^2 = 0$。
4.最终极坐标形式展示
所以,圆的直角坐标方程(x−a)2+(y−b)2=r2的极坐标方程可以写成:
$r^2 - 2ar\\cos(\\theta) - 2br\\sin(\\theta) + a^2 + b^2 = 0$。
这样,我们成功地将圆的直角坐标方程化为极坐标方程。
极坐标方程所有公式一、极坐标系简介极坐标系是一种常用的二维坐标系统,通过角度和半径参数来描述平面上的点。
在极坐标系中,每个点可以用一个有序对(r, θ)表示,其中 r 代表点到坐标原点的距离(称为极径),θ 表示该点与指定方向的连线(通常为正 x 轴)之间的夹角(称为极角)。
可以将极坐标系与直角坐标系相互转换,极坐标系的公式可以用于描述很多几何和物理问题。
二、极坐标方程表达形式极坐标方程可以通过不同的表达形式来描述。
下面是常见的几种极坐标方程形式:1. 极径与极角的显式函数:以极径 r 和极角θ 作为变量,表示为r = f(θ)。
这种形式下,极径 r 是极角θ 的函数。
常见的例子有圆形方程 r = a(a 为常数)和椭圆方程 r = a(1 - e·cosθ)(a 和e 为常数)。
2. 极径与极角的参数方程:将极角θ 表示为 t 的函数,极径 r 表示为 t 的函数,表示为 r = f(t),θ = g(t)。
通常通过引入一个或多个参数 t 来描述曲线。
常见的例子有直线参数方程 r = a + bt (a 和 b 为常数),和螺旋线参数方程 r = at,θ = b t(a 和 b 为常数)。
3. 函数关系:将极径 r 和极角θ 表示为函数之间的关系,即F(r, θ) = 0。
这种形式下,极坐标方程可以看作是一个隐式方程。
常见的例子有椭圆方程 r^2 = a2·sin2(θ) + b2·cos2(θ)(a 和 b 为常数)和心形线方程r = a(1 + cosθ)(a 为常数)。
三、主要极坐标方程公式1. 圆的极坐标方程圆的极坐标方程为 r = a,其中 a 为常数。
这表示了以坐标原点为中心,半径为a 的圆。
2. 椭圆的极坐标方程椭圆的极坐标方程为 r = a(1 - e·cosθ),其中 a 和 e 为常数,a 表示椭圆的主轴长度,e 表示离心率。
当 e = 0 时,椭圆退化为圆。
圆的极坐标方程
圆的极坐标公式:ρ2=x2+y2,x=ρcosθ,y=ρsinθ,tanθ=y/x,(x不为0)。
在数学中,极坐标系是一个二维坐标系统,该坐标系统中任意位置可由一个夹角和一段相
对原点—极点的距离来表示。
1.到定点的距离等于定长的点的集合叫做圆。
这个定点叫做圆的圆心,通常用字母“o”表示。
2.连接圆心和圆周上任意一点之间的连线叫做半径,通常用字母“r”表示。
3.通过圆心并且两个端点都在圆周上的线段叫做直径,通常用字母“d”表示。
4.连接圆上任意两点的线段叫做弦。
在同圆或等圆中,最长的弦是直径。
5.圆上任意两点间的部分叫做圆弧,简称弧。
大于半圆的弧称为优弧,优弧是用三个
字母表示。
小于半圆的弧称为劣弧,劣弧用两个字母表示。
半圆既不是优弧,也不是劣弧。
1、定位和导航
极坐标通常被用于导航,作为旅行的目的地或方向可以作为从所考虑的物体的距离和
角度。
例如,飞机使用极坐标的一个略加修改的版本进行导航。
2、建模
有径向对称的系统提供了极坐标系的自然设置,中心点充当了极点。
这种用法的一个
典型例子是在适用于径向对称的水井时候的地下水流方程。
有径向力的系统也适合使用极
坐标系。
这些系统包括了服从平方反比定律的引力场,以及有点源的系统,如无线电天线。
3、行星运动的开普勒定律
极坐标提供了一个表达在引力场中开普勒行星运行定律的自然数的方法。
感谢您的阅读,祝您生活愉快。