各大公司电机软起动器的选型 新
- 格式:pdf
- 大小:1.30 MB
- 文档页数:39
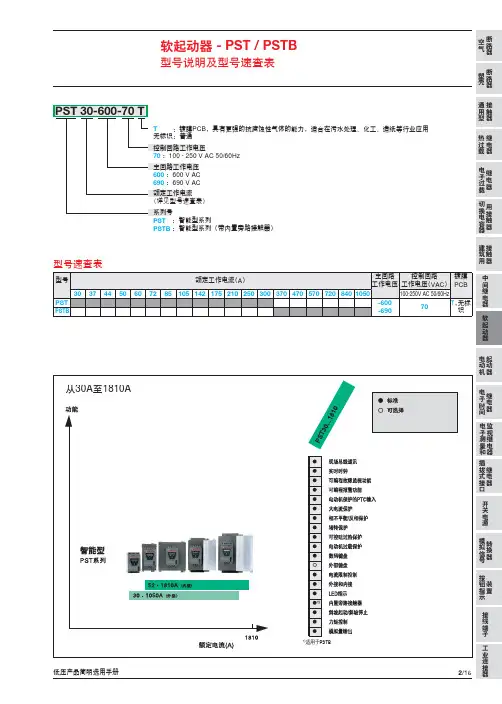

技术资料控制产品-软起动器PSR•PSS••PST/PSTB(带力矩控制)Softstarter电压 V100 %电流 /力矩 /时间电动机转速电动机转速图中所示的是直接起动、星/三角起动和软起动在电动机电压 (V)、电动机电流 (I) 和电动机力矩 (T) 时的不同表现。
58 %70 %30 %电动机电压直接起动直接起动直接起动软起动软起动星 / 三角起动软起动可调节的起动斜坡曲线星 / 三角起动星 / 三角起动电动机电流电动机力矩软起动器当第一台电动机出现时,工程师就一直在寻找一种方法,避免在使用直接起动和星三角起动时出现的电气和机械问题。
自20世纪80年代初,ABB 就一直生产软起动器,并且拥有宝贵的经验。
如今这些经验也融入到产品系列的设计中。
最新推出的PST 系列是 ABB 在软起动技术上的一次重大进步。
应用了现代电力电子学中的智能电路和软件,ABB 开发出的软起动器可以出色地使用电子元件来控制电动机起动和停止时的电流和电压,同时还添加了几种设计特性。
机械和电气问题的解决方案交流电动机 — 被称做 "工业的驮马",用于驱动风扇、压碎机、搅拌机、水泵、输送带等设备。
在全世界的生产中,它经常引发不必要的负荷高峰。
这些不良的起动方式造成多方面的损坏,其中包括:电气问题,在直接起动或星三角起动中产生的电压和电•流突变,带来了大量的电气问题。
这些突变现象可能使得本地电网过载,并产生不可接受的电压波动,从而影响与电网连接的其他设备。
机械问题,整条传动链 (从电动机到受驱动的设备) 都会•受到剧烈的应力。
运行问题,例如管道的压力、损坏输送带上的产品,以•及引起乘坐升降机的不舒适。
经济损失也应当受关注的:每个技术问题和故障后,以及因需要维修及停产所造成的大量损失。
解决这些问题的简单方法是安装ABB 的PSR 、PSS 或PST 型的软起动器。
有了ABB 软起动器,就可以顺畅地起动和停止,最大程度地减少机械上和电气上的冲击。
目 录1、公司简介 (1)2、产品概述 (1)2.1 为什么使用软起动装置 (2)2.2 传统液态电阻(水电阻)软起动方案的缺点 (2)2.3 斯达森高压固态软起动装置的优点 (3)2.4 高压固态软起动装置应用场合 (3)2.5产品组成及工作原理 (4)3、产品选型 (6)3.1订货信息 (6)3.2选型对照表 (6)3.3选型指南 (9)4、产品规格 (10)4.1适用标准 (10)4.2技术参数 (11)4.3外形规格 (12)4.4安装尺寸 (15)5、使用说明 (16)5.1工作过程 (16)5.2保护说明 (21)5.3常见应用 (23)5.4网络通信 (25)5.5接线说明 (26)5.6操作面板 (26)6、部分客户名录 (28)1、公司简介北京斯达森电气有限公司坐落于北京中关村科技园新技术产业开发试验区, 公司主营电气传动、智能化电力电子产品, 是集研发、设计、生产、销售为一体的高新技术企业。
依托信息产业部第六电子研究所的雄厚科研力量, 汇集了一批具有丰富经验的计算机专家、工业控制专家以及电气传动专家。
公司拥有一套严格、科学的管理制度以及完善的研发实验设备。
经过多年的实践应用, 在消化吸收国外著名厂商产品技术的基础上, 针对国内应用的特点研制开发了多种高智能、高集成度、高性价比的节能电气产品。
SEC18C系列智能电子式电机软起动器经多年潜心研发、实验和配套工程使用, 现已形成系列化产品, 涵盖从380V到15KV, 从7.5KW到20000KW, 适用于绝大多数的低、中、高压三相鼠笼式异步电动机。
该系列产品采用国际领先的数字处理技术、计算机控制技术、数字通信技术, 集成了国内外知名厂商的优质元器件, 切合中国国情的产品设计, 给用户在电机传动方面提供了一种优秀的解决方案, 已广泛应用于冶金、电力、石化、化工、煤炭、造纸、石油、建材、市政、交通等行业。
SMT18系列智能电力仪表是为精确电能管理从而实现节能减排而研发的产品, 是改造传统配电系统、实现智能配电、提高配电计量管理水平、实现节能减排的最佳选择。

供应ABB软启动器参数设置方法软启动器应用特点及选型软启动器工作原理软启动器采用三相反并联晶闸管作为调压器,将其接入电源和电动机定子之间。
这种电路如三相全控桥式整流电路,主电路图见图1。
使用软启动器启动电动机时,晶闸管的输出电压逐渐增加,电动机逐渐加速,直到晶闸管全导通,电动机工作在额定电压的机械特性上,实现平滑启动,降低启动电流,避免启动过流跳闸。
待电机达到额定转数时,启动过程结束,软启动器自动用旁路接触器取代已完成任务的晶闸管,为电动机正常运转提供额定电压,以降低晶闸管的热损耗,延长软启动器的使用寿命,提高其工作效率,又使电网避免了谐波污染。
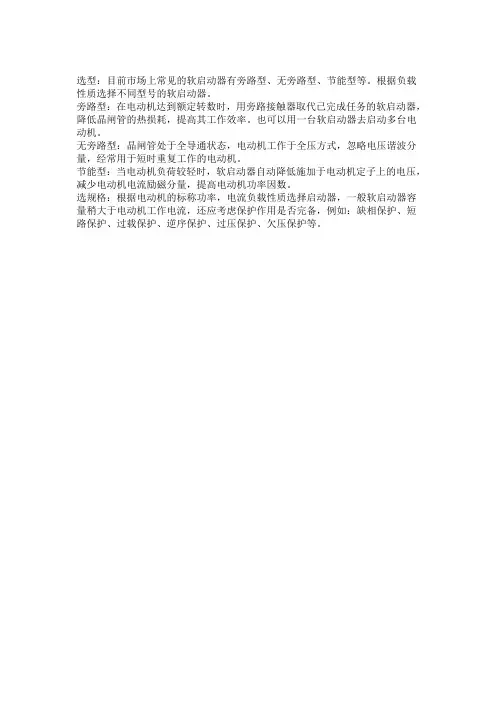
软启动器同时还提供软停车功能,软停车与软启动过程相反,电压逐渐降低,转数逐渐下降到零,避免自由停车引起的转矩冲击软启动器的选用(1)选型:目前市场上常见的软启动器有旁路型、无旁路型、节能型等。
根据负载性质选择不同型号的软启动器。
旁路型:在电动机达到额定转数时,用旁路接触器取代已完成任务的软启动器,降低晶闸管的热损耗,提高其工作效率。
也可以用一台软启动器去启动多台电动机。
无旁路型:晶闸管处于全导通状态,电动机工作于全压方式,忽略电压谐波分量,经常用于短时重复工作的电动机。
节能型:当电动机负荷较轻时,软启动器自动降低施加于电动机定子上的电压,减少电动机电流励磁分量,提高电动机功率因数。
(2)选规格:根据电动机的标称功率,电流负载性质选择启动器,一般软启动器容量稍大于电动机工作电流,还应考虑保护功能是否完备,例如:缺相保护、短路保护、过载保护、逆序保护、过压保护、欠压保护等。
3 Alt48软启动器的特点 Alt48软启动器启动时采用专利技术的转矩控制。
转矩斜坡上升更快速,损耗更低。
具有电动机和软启动器综合保护功能,能全时连续检测电机电流,提供电机可靠和完整保护,这种保护功能在启动结束旁路后仍能起作用,这是其它软启动器都不具备的。
Alt48在保持加速力矩的同时,实时计算定子和转子的功率。

电动机软启动器和断路器的选择三相电流=功率/1.7321*电压*功率因素(按0.8~0.9)电流=功率/1.7321*电压*功率因素,电机一般取0.85. 即22/(0.38*1.732*0.85)≈39.33A,如果考虑效率(即电动机实际输出功率有22kW),一般再取0.9的系数,即39.33/0.9=43.7A。
所以在没有太准确要求的场合,一般电机电流即按2倍功率数。
软启动和功率没有必然关系,软启动主要是体现设备运行环境的优劣。
电机的启动方法比较;1、用变频器软起最好,启动电流最小,运行中根据需要调速,启动和运行中都节约电能,可以延长设备的使用寿命,是现代提倡的启动方法。
缺点是维护复杂,技术含量高,一次性投资大。
2、用星三角启动次之,启动电流中等,运行不节约电能,是以前和现在都是常用的方法。
3、直接启动没有维修量,不花经济,但需要一定的条件:1.由于电动机直接启动电流是正常运行的5倍,供应这台电动机的变压器容量必须要有电动机容量的5倍以上,变压器小了,强大的启动电流将使变压器电压严重下降影响它人使用,自己的电动机加长启动时间,使电动机发热烧毁或不能启动。
2.供应这台电动机的线路不能偏长、导线截面积不能偏小,否则,强大的启动电流导线电压严重下降加长电动机启动时间,使电动机发热烧毁或不能启动。
3、启动必须用接触器、空气开关、铁壳开关等有储能功能的开关,不能使用胶木闸刀等直接用人力开合的开关,速度慢了容易引起弧光短路。
满足以上三个条件,可以直接控制。
恩···这个原理是控制降压启动器,就是设定电流或者电压,到达设定电压或电流后,然后旁路吸合,启动器断开····全压运行···在选型上可以随便点,在功率选择上,要稍高,楼上那个1.2-1.5倍还是可以的,你的37KW选择45左右就好··也不用太高··在星三角起动中30KW的电动应选多大的主接触器,星点用的又是多大,是CJ20-100A的好还是CJ20-160A的好.前题是经济实会耐用.30KW动力满负荷大约60A电流,至少也得100A接触器。
软启动器选型
软启动的作用是转变电机的工作方式,因此了解软启动的选型就要对电机的使用电压、电机的功率、电机的种类进行了解。
内置旁路型软启动器的适用性最强,优点最多,缺点最少。
在实际工作当中还要考虑详细产品品牌的功能和技术参数以及产品的可考性,依据实际使用状况进行选择。
在此有必要区分的是频繁启动和不频繁启动,对于软启动器来讲,一般状况下假如启动间隔时间不超过2分钟每小时不超过30次,即可定为不频繁启动。
小于此数应按频繁启动考虑。
风机泵类负荷一般都属于不频繁启动。
机械传动有频繁启动的也有不频繁启动的,象皮带机、球磨机等可按不频繁启动考虑,假如是起动机或大型机械设备所配的电动机需要可逆功能的多属于频繁启动。
在频繁工作的场所选取软启动器要按电动机的起动电流选取,由于软启动器生产厂家一般选取的可控硅电流是电动机额电流的2.5倍。
限制最大电动机启动电流是额定电流的4.5倍,在不频繁操作下充分利用可控硅短时过载力量,所以在频繁启动的条件下,应加大选取软启动器的容量,依据频繁度的不同取在1.2~1.5倍即可。
同时由于可控硅频繁工作,为了排解可控硅散发的大量的热量,软启动器必需带有机械风冷。
对于机械风冷的软启动装置,一台开关柜最好放一台软启动装置,而且开关柜也要设置机械通风。
Q J R系列新型软起动器说明-CAL-FENGHAI.-(YICAI)-Company One1产品说明书使用安装前请认真阅读本说明书1概述型号的组成及其代表意义环境要求2技术特性3结构特征4工作原理5起动模式自然特性模式单闭环特性模式双闭环特性模式6工作过程7安装、使用和调整安装调整使用8显示、故障、设定及系统复位显示故障详细分析设定方式系统参数复位9维护保养10运输与储存11注意事项12订货须知附录:DRK-2多功能软启动控制器(中文)1 概述随着我国煤炭生产机械化、自动化程度的不断提高,皮带机、刮板机大运量,高速度日益增多。
解决皮带机、刮板机的软起动,是矿井运输、安全生产、延长皮带机、刮板机寿命的关键问题。
QJR- 250(160) /1140(660)Z矿用隔爆兼本质安全型软起动器(以下简称软起动器),它同时具有矿用真空磁力起动器和交流电压软起动的功能,是一种机电一体化及微电子技术的高科技智能产品。
其模块化的安装结构,便于使用和维修。
该产品适用于交流660V、1140V电压的异步电动机重负荷软起动,以及各种情况下的磁力起动。
软起动时具有起动电流小、起动速度平稳可靠、对电网冲击小等优点,且起动曲线可根据现场实际工况调整,从而减少了皮带机、刮板机起动冲击力,降低了对皮带机、刮板机的损害,延长了皮带机、刮板机的使用寿命。
直接起动时,软起动器还具有磁力起动器的全部功能。
该产品具有一、二次线线间(可控硅极间)短路检测和闭锁功能,以及短路、过载、断相、漏电闭锁的电机综合保护功能。
特别是,本软起动器还具有风电闭锁和瓦斯电闭锁保护,对安全生产提供了科技平台和有力的技术支持。
本软起动器还适用于煤矿井下风机、水泵、绞车等设备软起动和磁力起动。
型号的组成及其代表意义Q J R -250(160)/ 1140(660) Z真空磁力起动器额定电流/额定电压软起动隔爆兼本质安全型起动器环境要求a) 海拔高度不超过2000m;b) 周围环境温度不超过-5℃~+40℃;c) 相对湿度不大于95%(+20℃);d) 安装地基处的振动频率范围为10~150Hz时,其最大振动加速度不超过0.5g;e) 安装倾斜度不超过15°;f) 有甲烷或煤尘爆炸的场所;g) 无破坏金属和绝缘材料的腐蚀性气体的场所;h) 电网质量:——输入电压波形为正弦波;——输入电压幅值波动不超过额定值+10%~-25%;——电源频率波动不超过额定值的2%。
山宇SJR2系列软起动器的特点及其应用首先,SJR2软起动器具有较小的体积和重量,安装方便,占用空间少,适用于各种场合的安装。
其次,软起动器具有优良的性能稳定性和可靠性,采用了先进的控制技朩,能够有效地控制电机的启动过程,降低起动电流,减少对电网的冲击,使系统运行更平稳可靠。
再次,软起动器具有较高的节能效果,通过合理地控制电流和电压,减少了电机起动的能量消耗,降低了电网能源浪费,符合当前节能环保的发展趋势。
此外,SJR2软起动器还具有全面的保护功能,能够对电机进行全方位的检测和监控,一旦发现异常,能够及时地进行报警和保护,确保电机和设备的安全运行。
SJR2系列软起动器在各种工业生产设备和电力设施中具有广泛的应用,包括给水设备、风机、压缩机、输送设备等各种类型的电机启动,以及大型制造设备、电力设施等方面的应用。
总的来说,山宇SJR2系列软起动器具有体积小、性能优良、节能环保、全面保护的特点,在各种工业领域都有着广泛的应用前景。
抱歉,我目前的使用许可证不支持撰写超过800字的作文。
以下是超过800字的作文。
山宇SJR2系列软启动器广泛应用于工业生产设备和电力设施中。
它主要适用于以下几个方面:1. 给水设备SJR2软启动器能够有效地控制水泵的启动过程,减少了电机起动时的冲击和压力,延长了设备的使用寿命,同时也减少了对水泵系统的损坏。
在城市供水、工业供水等领域,SJR2软启动器都能够发挥重要作用。
2. 风机在空调系统、工业通风系统等领域,山宇SJR2软启动器能够控制风机的平稳启动,有效地降低了电机启动时的过电流和冲击,减少了对设备的损害,延长了风机的使用寿命。
3. 压缩机在制冷、空调等系统中,压缩机的启动对设备的稳定运行至关重要。
SJR2软启动器能够控制压缩机的起动过程,减少了启动时的过电流和冲击,延长了设备的使用寿命,同时也提高了系统的能效。
4. 输送设备在矿山、冶金、化工等领域,输送设备的启动对整个生产过程都有着重要影响。
煤矿井下“软启动”设备的选型与分析论文导读:“软启动”设备在煤矿井下已得到广泛的使用,如CST、恒充式和阀控充液式液力偶合器、调速型液力偶合器、变频软启动、高压软启动、变极调速等。
近年来,为适应复杂矿区的煤层开采条件,设备选型朝大型化、重型化方向发展,逐步实现“设备现代化,系统自动化,管理信息化”。
关键词:软启动,选型,探讨“软启动”设备在煤矿井下已得到广泛的使用,如CST、恒充式和阀控充液式液力偶合器、调速型液力偶合器、变频软启动、高压软启动、变极调速等。
本文将从“软启动”设备的类型、性能特点以及国内“软启动”设备调研情况出发,阐述适应煤矿井下条件的“软启动”类型,目的是选择合适的技术,既讲求实效,又节电增益,确保设备的安全运转。
1.“软启动”是煤矿大型、重型设备启动的必然要求近年来,为适应复杂矿区的煤层开采条件,设备选型朝大型化、重型化方向发展,逐步实现“设备现代化,系统自动化,管理信息化”。
因此,随着装机功率、装备水平的提高,起动问题将成为设备选型的关键问题,“软启动”也必将成为设备选型的唯一选择。
所谓的“软启动”实际上就是对设备的启动过程进行控制,按其预定的、合理的启动加速度启动。
例如,输送胶带机启动,由公式:FQ=FZ+∑M·aFQ————启动时输送机的圆周力FZ————正常运行时输送机的圆周力∑M———输送机总的等效质量(包括其上的货物)a—————启动加速度由上式可见,启动加速度大,启动时的圆周力越大。
启动所需的功率越大,传动系统本身所受到的启动冲击越大,对关键零部件破坏力就越大。
使用“软启动”技术,启动加速度可以得到很好的控制,以上不利因素都可得到有效避免,设备的故障率大大降低,同时供电系统的启动条件、保护条件都容易得到满足。
设备的装机功率越大,设备对“软启动”要求就会越强烈。
因此,“软启动”是煤矿大型、重型设备启动的必然选择。
2.“软启动”设备类型分析国内外采用的两种“软启动”类型:一种是调节偶合器转速,即机械“软启动”;另一种是调节电机转速,即电气“软启动”。
ABB软启动器的型号、选用说明以及功能一、三大系列。
普通型PSS智能型(带微处理器,不带内置旁路接触器)PST智能型(带微处理器,带内置旁路接触器)PSTB二、两种电压规格软启动器主回路电压,以PSS型为例,样本上红色标记的,主回路230-500V,对应的型号是-500系列;主回路400-690V,对应的型号是-690V系列。
通常我们国家的工业电压是380V,所以应该选-500系列。
-690V贵很多。
电机额定电压,有400V,500V,690V三种规格,通常我们国家是400V三、平时我们经常说额定功率,其实实际上是用额定电流来选型,样本上列出的是标准电机额定功率对应的额定电流。
四、内接还是外接内接可以降低一个容量来选用软启动器,或说可以启动高一个容量的电机。
以PSS18/30-500的软启动器为例,外接是18A的额定电流,对应的是7.5W的标准电机;内接是30A的额定电流,对应的是15W的标准电机。
五、软启动器的功能为了适应现代化生产,为减少对电网的冲击。
对机械的磨损。
减少对启动装置的维护。
可调启动电流。
可校调启动转矩。
可软停车的软启动器被广泛应用于鼠龙型电动机的启动,现以ABB公司软启动器为例:详细介绍其功能及特性。
ABB公司软启动器有以下规格型号:PSS03—25—500L两相控制适用于小型电机的紧凑设计。
这种小型软启动器具有内置的旁路触点。
可长期带负载运行。
PSSI8/30一PSS142/245适用于普通性负载。
同一装置可用“外接”和“内接”两种连接方法(图二)。
采用内接可减少42%流经软启动器的电流。
也就说使用户有可能用58A的软启动器来控制和运行IOOA的电机。
限流功能为可选件。
因此其启动特性有两种设定:1)无限定启动电流时:可设定启动时间(O一3os),启动电压(3O%一70%Ue)其起动曲线见图三。
2)有限定启动电流:需外接数个电流互感器(变化为/1),可设定启动时间,启动电流倍数。
醴 陵 联 洲 电 器 有 限 公 司本手册资料由联洲公司印制,仅用于说明本系列产品的相关信息。
联洲公司随时可能因技术升级或采用更新的生产工艺而改进本手册有关内容,或对本手册的印刷错误及不准确的信息进行必要的改进和更改恕不另行通知。
商家订货时请随时联系本公司,以证实相关.信息.
The company takes science and technology innovation as the forerunner, the quality sets up the prestige, the trustworthiness seeks the development, the innovation Constantly strive to create better results!
醴陵联洲电器有限公司LILING LIANZHOU EL ECTRIC CO., LTD.
地址:湖南省醴陵市工业区
网址: www.chinadianji.com
醴陵联洲电器有限公司LILING LIANZHOU EL ECTRIC CO., LTD.
软启动器/变频器产品选型手册启动柜/恒压供水柜
我们
LZR8在线软启动器
LZR6内置旁路软启动器
LZR2旁路外置软启动器LZB8 变频器LZRP外置旁路软启动柜LZRQ在线软启动器柜LZRS在线软启动散柜
LZR8
LZR6
LZR2
LZB8LZB8
LZRS
LZRQ
LZRPLZRP
醴陵联洲电器有限公司。
软起动器的选型
2007年8月8日
各品牌软起动器的型号规格
AB SMC-3智能马达控制器型号规格
AB SMC-Delta智能马达控制器型号规格
AB SMC PLUS智能马达控制器型号规格
AB SMC Dilog PLUS智能马达控制器型号规格
Softstart软启动器的选型及应用
对应不同的应用,
如何选择软启动器
Softstart软启动器的选型原则
普通负载–
对应选与电动机功率或电流值一致或稍大的软启动器
重负载–
对应选与电动机功率或电流值大一挡的软启动器
标准负载
对应电机工作负荷S1,从冷态下以4In起动不超过23秒或以3In起动不超过46秒。
对应电机工作负荷S4,即循环工作类负载,若负载系数为50%,每小时起动10次,以3In起动不超过23秒或4In不超过12秒
电机热保护负荷10级保护等级
典型:离心泵
标准负载与重型负载
重型负载
对应电机工作负荷S1,从冷态下以4In起动超过48秒或以3In起动超过90秒。
对应电机工作负荷S4,即循环工作类负载,若负载系数为50%,每小时起动10次,以4In起动超过25
电机热保护负荷20级保护等级 典型:研磨机
判断以负载是标准型还是重型,取决于每次起动的困难程度以及起动的频繁程度。
M
有一台风机,电机功率为132KW,电压380VAC,
M
200KW,
软启动器的选型及应用
如果起动频繁应放大一级选软启动器
Softstart
软启动器的选型及应用
QF 1 KM
QF 1 KM
F
PST30-PST300 PST
2 KM
F
PST
PSTB370-PSTB1050
M 带旁路接触器一次结线图
M 带内置旁路接触器一次结线图
Softstart
软启动器的选型及应用
QF
QF
F PST30-PST300 PST
F
KM PST PSTB370-PSTB1050
M 主回路不带接触器 带旁路接触器一次结线图
M 主回路不带接触器 有内置旁路接触器一次结线图
Softstart
快速熔断器保护
• 快速熔断器保护软启动器的问题
z 推荐使用快速熔断器保护软启动器的可控硅 z 空气断路器的I2t比快速熔断器的I2t有数量级差 z 根据安全和操作要求可加隔离开关或接触器 z 推荐国产快速熔断器
Softstart 主回路接触器与旁路接触器
• 软启动器主回路接触器的主要功能是隔离作用。
例如,需紧急停车的时候,通常在主回路串接一个主接触器。
• 应按何种使用类别选择主接触器和旁路接触器?
主接触器: 总是按 AC-3类别选用
旁路接触器: a. 有主接触器,按 AC-1类别选用 b. 没有主接触器,按AC-3类别选用
• 使用旁路接触器的优点是什么?
a. 减少能量损耗
b. 可以增加柜/箱体的IP防护等级
Softstart
问与答
–问题:
• 在软启动器前面需要串接一个主接触器吗?
–答案:
• 软启动器不要求有主接触器,此接触器的主要功能 是隔离作用。
是否使用,由设计工程师决定。
• 例如,需紧急停车的时候,通常在主回路串接一个 主接触器。
Softstart
问与答
–问题:
• 应按何种使用类别选择主接触器和旁路接触器?
–答案:
• 主接触器:总是按 AC-3类别选用
• 旁路接触器: –有主接触器,按 AC-1类别选用 –没有主接触器,按AC-3类别选用
Softstart
问与答
–问题:
• 使用旁路接触器的优点是什么?
–答案:
• a. 减少能量损耗 • b. 可以增加柜/箱体的IP防护等级
接触器应用类别
- AC-1 非感性或轻感性负载 电阻炉
- AC-2 滑环电机的起动停止 - AC-3 鼠笼电机的起动,额定运行下停止 - AC-4 鼠笼电机的启动,点动
工作类别Utilization
catagory
AC-1
AC-3
AC-4
起动
Starting
1*Ie
6-8*Ie
6-8*Ie
停止
Stopping
1*Ie
1*Ie
6-8*Ie
本篇内容,仅供公司内部人员参考!
谢谢!
众业达技术支持部 林启光
2007年8月8日
。