应用激光干涉仪完成RAMMATTIC1201数控机床螺距误差补偿
- 格式:doc
- 大小:26.50 KB
- 文档页数:5

雷尼绍激光干涉仪螺距补偿操作说明补偿点坐标(激光仪显示的数值)与机械坐标值一致,从小往大(矢量)‐560到0的方向补一,FANUC ,三菱系列1, 3605 #0 是否使用双向螺距补偿;(选项)2, 3620 每个轴的参考点的螺距误差补偿点号3, 3621 螺距补偿表最小点(螺距补偿表长度与补偿点个数不一定一一对应)4, 3622 螺距补偿表的最大点5, 3623 螺距误差补偿系数(螺距补偿表的数值最大只能输7,当补偿值大 于7时,例如8,就只能将改值改为2,在对应点输入8/2=4)6, 3624 螺距误差补偿点间隔例:加工中心X轴的坐标是从0到1050,Y轴的坐标从0到‐560,Z轴坐标从0到‐560.在FANUC系统中设置参数如下:本例中1000/25=40,即激光干涉仪的补偿表数据输入100~139而对于Y轴与Z轴则与X轴有不同,X轴机械坐标是从0到1050,Y Z轴机械坐标是从0到‐560(550/25=22) 因此补偿起始点是从221(301)开始,激光干涉仪的补偿表就倒过来(从下面往上)补程序:%O0100G01G57G90Y1F3000G4X1.Y0G4X4.M98P0101L21Y-1G4X1.Y1G4X4.M98P0102L21M99%雷尼绍软件误差补偿表格设置如下:测量后误差补偿值如下:补偿前的定位/重复定位曲线:补偿后的曲线:注:此为Z轴实测图,是错位输入:具体操作是将23 的‐2输入螺补的300中,22的‐2输入299中,21的‐2输入298中,21的‐1输到297中,依次类推,最后将25的0输入到277中。
二,西门子雷尼绍软件应设绝对32450 反向间隙32700 螺补生效,在螺补文件执行后更改为1,执行时应为零,否则报警17070.断电重新启动,螺补生效(在诊断的轴信息在绝对补偿值测量系统 1 中可以观察到当前点生效的补偿值。
具体设置如图:该例是ATV35SM 车削加工中心的X轴根据上图设置所产生的补偿表:补偿原理及方法参见西门子简明调试手册。

激光干涉仪在机床定位精度测量中的误差分析摘要: 使用( renishaw ) 激光干涉仪对一台立式铣床的定位精度进行了测量。
在启用和关闭机床环境补偿系统的条件下, 得出了两组相差较大的实验数据。
通过对激光干涉仪在测量中的误差进行分析, 找出了定位精度变化的原因和相关数据的变化范围。
由于数控机床热变形的不稳定性和测量方法的多样性, 到现在为止, 国内还没有统一的检验通则用来评定机床的热误差大小。
目前, 用来评定机床性能的主要依据之一是机床轴线的定位精度和重复定位精度的大小。
能够用于检测数控机床几何误差的检测方法有很多:一维球列测量法、球柄仪测量法和激光干涉仪测量法等。
但在生产实践中, 考虑到检测设备对测量精度、稳定性以及通用性等要求, 国内外生产厂家都采用激光干涉仪测量法来评定数控机床的轴线定位精度大小。
在使用激光干涉仪进行线性定位误差测量时, 分光镜或反射镜之一保持静止, 另一个光学元件沿着线性轴线运动。
图1中, 分光镜静止不动, 反射镜沿着预定的方向运动。
误差分析激光干涉仪是一种高精度的计量仪器, 自身的精度很高, 但在使用时会受到环境、安装条件、机床温度和线膨胀系数不准确等诸多因素的影响, 从而降低了测量精度。
激光干涉仪在机床定位精度测量中的误差包括激光干涉仪的极限误差e1、安装误差e2 和温度误差e3 用激光干涉仪实现高精度定位主轴头和控制系统补偿的位置误差方面, 大型加工中心的定位精度要求为数百分之一毫米。
采用ML10激光干涉仪就能达到要求。
航空工程工业加工大型整体部件和大型轻合金模具都需要X轴和Y轴行程达数米的加工中心。
平面度、角度和位置精度测量ML10提供的测量范围完全能满足各种不同要求:可以测量导轨的垂直度和水平平直度,主轴头的定位精度,正交轴的角度和回转轴的定位精度。
激光干涉仪便可自动测量主轴头的位置偏差。
ML10是测量大型加工中心平直度与定位精度最好且精度最高的测量装置。
用激光干涉仪测量数控机床主轴误差新法从激光干涉仪检验的内容来看,从最初的单独测量机床各轴的位移精度,扩展到分别测量定位精度、直线度、平行度、垂直度等,再到现在使用分布体对角线测量法测量机床的三维整体性能。
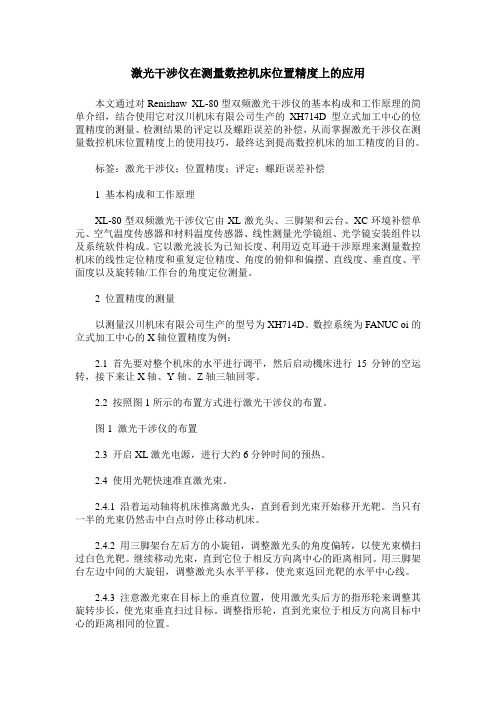
激光干涉仪在测量数控机床位置精度上的应用本文通过对Renishaw XL-80型双频激光干涉仪的基本构成和工作原理的简单介绍,结合使用它对汉川机床有限公司生产的XH714D型立式加工中心的位置精度的测量、检测结果的评定以及螺距误差的补偿,从而掌握激光干涉仪在测量数控机床位置精度上的使用技巧,最终达到提高数控机床的加工精度的目的。
标签:激光干涉仪;位置精度;评定;螺距误差补偿1 基本构成和工作原理XL-80型双频激光干涉仪它由XL激光头、三脚架和云台、XC环境补偿单元、空气温度传感器和材料温度传感器、线性测量光学镜组、光学镜安装组件以及系统软件构成。
它以激光波长为已知长度、利用迈克耳逊干涉原理来测量数控机床的线性定位精度和重复定位精度、角度的俯仰和偏摆、直线度、垂直度、平面度以及旋转轴/工作台的角度定位测量。
2 位置精度的测量以测量汉川机床有限公司生产的型号为XH714D、数控系统为FANUC oi的立式加工中心的X轴位置精度为例:2.1 首先要对整个机床的水平进行调平,然后启动機床进行15分钟的空运转,接下来让X轴、Y轴、Z轴三轴回零。
2.2 按照图1所示的布置方式进行激光干涉仪的布置。
图1 激光干涉仪的布置2.3 开启XL激光电源,进行大约6分钟时间的预热。
2.4 使用光靶快速准直激光束。
2.4.1 沿着运动轴将机床推离激光头,直到看到光束开始移开光靶。
当只有一半的光束仍然击中白点时停止移动机床。
2.4.2 用三脚架台左后方的小旋钮,调整激光头的角度偏转,以使光束横扫过白色光靶。
继续移动光束,直到它位于相反方向离中心的距离相同。
用三脚架台左边中间的大旋钮,调整激光头水平平移,使光束返回光靶的水平中心线。
2.4.3 注意激光束在目标上的垂直位置,使用激光头后方的指形轮来调整其旋转步长,使光束垂直扫过目标。
调整指形轮,直到光束位于相反方向离目标中心的距离相同的位置。
2.4.4 使用三脚架中心主轴上的高度调整轮来将激光头上下移动,直到光束再一次击中目标中心。

激光干涉仪的应用摘要:数控机床在使用过程中会出现机械磨损和各类性能下降的情况,本文着重描述如何利用renishaw激光干涉仪,对数控机床的直线度、线性定位及重复定位进行测量,取得数据进行机械调整和螺距补偿。
关键词:数控机床;精度检测;线性测量;直线度测量;系统补偿数控机床就是典型的数控化设备,它通常由信息载体、计算机数控装置、伺服系统和机床本体四部分共同组成。
数控机床在采用多年之后,随着机械的磨损,各类零部件性能的上升,各数控轴的定位精度可以随之上升。
在零部件磨损不太轻微的情况下,为节约成本,可以对数控设备展开系统螺距补偿,可以有效率提升设备的定位精度。
在更改关键零部件(丝杠、导轨、光栅等)后,也该对设备展开精度补偿,并使设备维持较低精度。
直线度是,在对设备进行螺距补偿之前,必须要保证机床轴在a、b两个方向的直线度。
此项工作同样可以利用激光干涉仪测量,通过调整机械部件,校准直线度。
保证直线度非常重要。
只有保证了直线度,线性定位、重复定位才有实际意义。
本文所述内容,以英国renishaw激光干涉仪为基准,第一部分了解直线度测量,适用于所有机械设备展开直线度调试。
第二部分了解线性定位及重复定位测量,适宜所有具备螺距补偿功能数控系统的数控设备。
3.测量及调试3.1直线度测量组件及原理直线度误差是指与运动轴垂直方向的位移。
直线度测量镜组可用来测量线性轴的直线度误差。
该组件包括下列要件:直线度干涉镜、直线度反射镜。
直线度测量有两个镜组:测量短程从0.1m至4m及测量长程从1m至30m。
就短程而言,距离指的是直线度干涉镜和直线度反射镜之间的距离,即可被测试的轴长。
就长程而言,距离指的是激光头和直线度反射镜之间的距离。
这两种情况下,直线度测量的量程都是±2.5mm。
直线度干涉镜和反射镜互相匹配成对。
因此,不能与其它直线度工具交换要件。
每一个直线度干涉镜和反射镜都标明独立的序号。
3.1.1沿水平轴直线度测量水平轴直线度检测,我们将直线度干涉镜安装在ml10激光器和直线度反射镜之间。
运用激光干涉仪对数控设备进行精度补偿的方法杨娟(南京东华传动轴有限公司)摘要:数控机床精度是影响汽车零部件加工精度的一个直接原因,通过激光 干涉仪对数控机床的定位精度、重复定位精度、反向偏差进行检测和补偿,使机床达到最佳精度,从而保证产品的加工质量。
关键词:激光干涉仪数控机床定位精度反向偏差精度补偿1引言在汽车零部件加工领域,多数企业都是采用 数控设备加工零部件,数控机床精度是影响被加 工工件尺寸精度的一个直接原因。
提高工件加工 精度,首先要提高机床精度,影响数控机床精度的 主要因素为机床零部件和结构的几何误差,工件 的最终加工精度是由机床刀具与工件之间的相对 位移误差决定的。
数控机床的定位精度是指数控工 作台部件在要求的终点所达到的实际位置的精度,实际位置与理想位置之间的误差称为定位误差。
数 控机床的定位精度是评定机床性能的一项重要指 标,它决定数控机床各轴运动的准确程度。
定位精 度的检测目前主要采用激光干涉仪来进行,如测出 的定位精度超出精度误差时,可对数控机床定位精 度误差曲线进行分析,分析机床可能的误差源:机 床滚珠丝杠的螺距误差、齿条的齿距误差、编码器、滚珠丝杠轴承的端部浮动间隙、机床导轨的安装水 平等。
当这些误差源基本排除或调整到最小误差 后,如仍达不到精度要求,可进行误差补偿,使各轴 线的定位精度达到预定的目标值。
我公司的两台加工中心因精度无法满足生产 要求,进行大修后,需恢复其定位精度,本文针对使用激光干涉仪对加工中心精度补偿过程做一个介绍。
2激光干涉仪定位精度的测量原理以英国产Renishaw ML10激光干涉仪测量机 床线性定位精度为例,其测量原理如图1所示。
激 光束由ML10激光发射器产生,这一束单频激光 波长能够达到632.9906nm,在真空状态下,波长稳 定性在长时间范围内能够优于0.1pm。
当这一束激 光到达干涉镜时,它被分裂成反射光束②和发光 束③。
这两束光传播到反射镜后,都被反射到干涉 镜的同一位置,干涉镜对两个光束进行调制后,直 接把光束④传回到激光发射器中,从而使两束光 在检测器中产生干涉条纹。
浅析提高激光干涉仪对机床螺距误差补偿效率的方法●引言CNC(数控机床)是计算机数字控制机床(Computer numerical controi)的简称,赴一种由程序控制的白动化机床。
白从1952年美国麻省理工学院研制出世界上第一台数控机床以来,数控机床在制造工业,特别是在汽车、航空航天、以及军事工业中被广泛地应用。
数控机床定位精度、重复定位精度的高低反映了该坐标轴在行程内任意点的定位稳定性,是影响数控机床加工精度、产生加工误差的主要冈素,也是评价和验收数控机床的一项重要检测内容。
数控机床在安装过程中的环境、温度、人为等冈素,以及在长期的运转和磨损老化过程中,由干滚珠丝杠等部件的磨损的因索,都会使其精度显著下降。
当前最为有效且广泛应用的方法是利用激光干涉仪对数控机床进行螺距误差补偿。
通常一台机床有三根或以上的直线轴,有的还包含旋转轴,很多厂家同时拥有多台机床需要进行补偿校正,工作量非常大。
因此必须对补偿的过程进行规范化,减少不必要的时间消耗,提高补偿的效率,这就要求操作者必须对数控机床的结构和软件系统有较深入的了解,同时能熟练地操作激光干涉仪。
下面我们将详细探讨螺距误差补偿的方法和过程;●螺距误差补偿的基本流程螺距误差补偿是将指定的数控机床各轴进给指令何置与激光干涉仪所测得的实际位置相比较,计算出在数控机床各轴全行程上的误差偏移值,再将误差偏移值补偿到数控系统中,则数控机床符轴在运动时控制刀具和工件向误差的逆办向产生相对运动,白动补偿误差偏移值,提高机床的加工精度。
关于螺距误差补偿的原理我们在此不作深入讨论,主要研究具体操作步骤如何缩短时问,具体操作流程如下图所示:第1步和第2步可以同时进行。
随着科技的进步,激光干涉仪的结构越来越轻便,预热时问也越来越短,目前中图仪器SJ6000激光干涉仪的预热只需要几分钟的时问。
机床编程是为了使机床按照运动定位精度的需要,设置分段运行问隔、行程、暂停时问和运动方式。
应用激光干涉仪完成RAMMATTIC1201数控机床螺距误差补偿摘要对每个工厂来讲,购买数控机床都是一笔相当可观的投资。
为了保证机床安装完成后迅速投入生产,必须保证精度在合格范围内。
因此检测机床误差并及时校正螺距、反向间隙等机床精度尤为关键和重要。
关键词数控机床;激光干涉仪;螺距;误差补偿;精度1 SINUMERIK 840D系统简介SINUMERIK 840D是西门子公司20世纪90年代推出的高性能数控系统。
它保持西门子前两代系统SINUMERIK 880和840C的三CPU结构:人机通信CPU(MMC-CPU)、数字控制CPU(NC-CPU)和可编程逻辑控制器CPU (PLC-CPU)。
三部分在功能上既相互分工,又互为支持。
2 SINUMERIK 840D系统机床的螺距误差补偿2.1 螺距误差补偿(LEC)数控机床“间接测量”原理:行程范围内任意位置上的丝杠的螺距为恒定不变的,这样坐标轴的实际位置可以由驱动轴的位置导出。
但由于轴的制造质量存在差异,加之测量手段本身的误差(比较起来还算小的)和与机床有关的其他误差影响,因此或多或少的存在偏差。
这样的综合误差可以通过轴的全行程范围内的一条误差曲线而求得。
测量时需用一个高精度仪器作为基准测量工具。
例如:激光干涉仪。
通过将相应的螺距误差补偿值输入控制器中,可大大提高机床的加工精度,降低加工工件的误差。
螺距误差补偿是按轴进行的,与其相关的轴参数有两个:MD38000最大补偿点数MD32700螺距误差补偿使能MD32700=0禁止,可以修改补偿值,补偿值不生效MD32700=1使能,补偿文件写保护,补偿值生效* 在此需要特别说明的是机床螺距误差补偿值是在该轴返回参考点后才生效。
2.2 螺距误差补偿的方法螺距误差补偿的方法有两种,方法一:·系统自动生成补偿文件·将补偿文件传入PC计算机中·在PC计算机上编辑并输入补偿值·将修改后的补偿文件在传回系统中方法二:·系统自动生成补偿文件·将补偿文件的文件格式改为加工程序格式·通过840D的MMC输入补偿值·将修改后的补偿文件运行一遍即可将补偿值送入系统中3 雷尼绍激光干涉仪的介绍雷尼绍ML10高性能激光干涉仪是机床、三坐标测量机及其它定位装置精度校准用的高性能仪器。
利用激光干涉仪对数控直线电机进给定位误差补偿直线电机在机床进给伺服系统中的应用,近几年来已在世界机床行业得到重视。
在机床进给系统中,采用直线电动机直接驱动与原旋转电动机传动的最大区别是取消了从电动机到工作台(拖板)之间的一切机械中间传动环节,把机床进给传动链的长度缩短为零。
这种传动方式被称为“零传动”。
正由于这种“零传动”方式,带来了原旋转电动机驱动方式无法达到的性能指标和一定优点。
提高直线电机进给系统的定位精度是实现其在数控机床应用的关键之一。
因而, 对直线电机进给定位误差进行测试和补偿是至关重要的。
激光干涉仪是国际机床标准中规定使用的检测验收数控机床定位精度的测量设备。
本文介绍了应用双频激光干涉仪测试数控直线电机进给的定位误差方法。
并利用最小二乘法分别建立定位误差的线性模型、分段线性模型、多项式模型,并对数控直线电机进给的定位误差进行补偿,研究表明采用软件补偿的方法可以较大地提高直线电机进给的定位精度。
直线电机进给定位精度测试方法直线电机进给产生定位精度误差因素很复杂,主要因素有:(1)光栅尺的制造及安装误差,光栅尺的运动部分及固定部分分别安装在进给单元的动子及定子底板上,产生一定的线性误差在所难免;(2)直线电机存在的边端效应使进给单元两端的力特性发生变化,影响进给平台制动,从而产生定位精度误差;(3)环境对定位精度误差产生的随机误差,由于没有采用隔震地基,周边环境的随机振动都会传递到进给单元及激光干涉仪,从而产生误差。
直线电机进给定位精度测试采用SJ6000 激光干涉仪测试。
SJ6000激光干涉仪是为机床检定提供了一种高精度标准,它准确度高,测量范围大(线性测长80m) , 测量速度快(4m/s) , 分辨力高(1nm) ,便携性好。
更由于SJ6000激光干涉仪具备自动线性误差补偿功能,可方便恢复机床精度。
测试方法如下:1. 安装SJ6000激光干涉仪测量系统各组件(见图1) 。
2. 在需测量的直线电机进给坐标轴线方向安装光学测量装置。
应用激光干涉仪完成RAMMATTIC1201数控机床螺距误差补偿
摘要对每个工厂来讲,购买数控机床都是一笔相当可观的投资。
为了保证机床安装完成后迅速投入生产,必须保证精度在合格范围内。
因此检测机床误差并及时校正螺距、反向间隙等机床精度尤为关键和重要。
关键词数控机床;激光干涉仪;螺距;误差补偿;精度
1 SINUMERIK 840D系统简介
SINUMERIK 840D是西门子公司20世纪90年代推出的高性能数控系统。
它保持西门子前两代系统SINUMERIK 880和840C的三CPU结构:人机通信CPU(MMC-CPU)、数字控制CPU(NC-CPU)和可编程逻辑控制器CPU (PLC-CPU)。
三部分在功能上既相互分工,又互为支持。
2 SINUMERIK 840D系统机床的螺距误差补偿
2.1 螺距误差补偿(LEC)
数控机床“间接测量”原理:行程范围内任意位置上的丝杠的螺距为恒定不变的,这样坐标轴的实际位置可以由驱动轴的位置导出。
但由于轴的制造质量存在差异,加之测量手段本身的误差(比较起来还算小的)和与机床有关的其他误差影响,因此或多或少的存在偏差。
这样的综合误差可以通过轴的全行程范围内的一条误差曲线而求得。
测量时需用一个高精度仪器作为基准测量工具。
例如:激光干涉仪。
通过将相应的螺距误差补偿值输入控制器中,可大大提高机床的加工精度,降低加工工件的误差。
螺距误差补偿是按轴进行的,与其相关的轴参数有两个:
MD38000最大补偿点数
MD32700螺距误差补偿使能
MD32700=0禁止,可以修改补偿值,补偿值不生效
MD32700=1使能,补偿文件写保护,补偿值生效
* 在此需要特别说明的是机床螺距误差补偿值是在该轴返回参考点后才生效。
2.2 螺距误差补偿的方法
螺距误差补偿的方法有两种,
方法一:
·系统自动生成补偿文件
·将补偿文件传入PC计算机中
·在PC计算机上编辑并输入补偿值
·将修改后的补偿文件在传回系统中
方法二:
·系统自动生成补偿文件
·将补偿文件的文件格式改为加工程序格式
·通过840D的MMC输入补偿值
·将修改后的补偿文件运行一遍即可将补偿值送入系统中
3 雷尼绍激光干涉仪的介绍
雷尼绍ML10高性能激光干涉仪是机床、三坐标测量机及其它定位装置精度校准用的高性能仪器。
ML10激光测量系统所有功能设计都与Laser 10 软件配合使用。
除了测量和分析诊断功能外,此软件包的标准配置还包括动态测量、旋转轴测量、双轴测量和电子水平仪及千分表程序接口模块。
该激光干涉仪系统通过接口与IBM 兼容的PC 机(包括笔记本计算机)连接,在灵活、直观的软件控制下进行自动测量,既节省了测量时间,又避免了人为误差,并能按国际上通行的标准进行数据分析处理,如ISO230-2、JIS-B6330、VDI3441、VDI2617、ASME B89等并适用中国国家标准GB17421-2000等,以便于按不同标准进行机床精度的评定和比较。
4 RAMMATIC1201蓝宝蒂数控机床螺距误差补偿实例
4.1 螺距误差补偿所需镜组
图 1 螺距误差补偿镜组
组件包括:
线性反射镜及安装螺钉;
角度反射镜;
角度干涉镜;
两个光靶。
4.2 螺距误差补偿镜组摆放的两种组合方式
图2和图3将显示两种如何配置镜组以执行螺距误差测量。
连接角度干涉镜的线性反射镜会将参考光束射回ML10 探测器光孔。
角度反射镜会将测量光束通过角度干涉镜射回ML10。
在测量时,其中一个光学元件保持不变,而另一个则沿着线性轴移动。
通常,反射镜设置为移动的光学元件,即反射镜固定在被测轴上,随轴移动而运动,而干涉镜则作为固定的元件,即干涉镜一般固定在机床主轴上不随被测轴的移动而运动。
图 2 镜组摆放组合方式1
图 3 镜组摆放组合组合方式2
4.3 RAMMATIC1201蓝宝蒂数控机床螺距误差补偿具体步骤
1)准备;
2)选择被测量轴及键入细节;
3)将被测量轴误差补偿参数清零;
4)调整激光和光学镜;
5)产生目标点;
6)采集数据设定;
7)采集原始数据并分析数据;
8)产生误差补偿值;
9)将误差补偿值传送给数控系统并检查补偿效果;
10)检查补偿结果。
4.4 螺距误差补偿功能使用时的注意事项
螺距误差补偿功能的开发不仅提高了数控机床定位精度,而且缩短了生产周期,在使用螺距误差补偿功能时要做好前后的辅助工作。
1)在激光测量前必须确保机床的几何精度合格及机床装配的完整性,或不影响激光测量结果的前提下进行测量;
2)被补偿轴必须在确保重复定位精度合格的前提下进行螺距补偿;
3)进行螺距补偿的数控机床在出厂前应在《机床精度检验单》或《机床电器参数表》上注明该机床使用了螺距补偿参数,并给用户附带机床螺距补偿参数表;
4)当测量较长距离或测量角度或直线度时,激光读数可能会有显著的不稳定性。
很可能是由于激光束受到空气挠动的影响。
因此,干涉最好是在温度均匀非常静止的空气中(没有任何挠动)或在被剧烈搅动或由风扇循环的空气中进行。
5 结论
另外经验也表明,80%已投入生产使用的机床在使用一段时间后,处在非正常超性能工作状态,甚至超出其潜在承受能力。
因此新机床在使用半年后需再次进行检定,之后可每年检定一次。
定期使用雷尼绍激光干涉仪检测机床误差并及时校正螺距、反向间隙等定位精度,可切实改善生产使用中的机床精度,改善零件加工质量,不至于产生废品,大大提高机床利用率。
参考文献
[1]李继中.数控机床螺距误差补偿与分析[J].组合机床与自动化加工技术,2010,2:98-101.
[2]杨永,向丹,姚屏.数控机床螺距误差补偿技术研究[J].工具技术,2007,
6:83-85.。