单预警机静态航迹规划建模与仿真
- 格式:pdf
- 大小:1.06 MB
- 文档页数:8
单预警机静态航迹规划建模与仿真
王国师;李强;杨征;吴长飞
【期刊名称】《工程设计学报》
【年(卷),期】2011(018)004
【摘要】预警机作为空军预警探测的重要组成部分,飞行前对其进行航迹规划是至关重要的.在分析预警机航迹规划与目前已研究的飞行器航迹规划区别的基础上,研究了单架预警机静态航迹规划问题.首先,结合当前预警机的作战运用模式,综合考虑对预警机跟踪监视目标性能有影响的各种主要因素,将预警机航迹规划划分为2个阶段;然后,对影响各阶段航迹规划的主要因素分别进行数学建模并得出代价函数,设计了各阶段具体的航迹规划步骤,并基于改进的粒子群算法对飞行段航迹进行搜索.通过Matlab仿真证明了所设计的方法能够根据目标分布情况自动生成质量优越的航迹.
【总页数】7页(P275-281)
【作者】王国师;李强;杨征;吴长飞
【作者单位】空军雷达学院研究生管理大队,湖北武汉430019;空军雷达学院预警监视情报系,湖北武汉430019;国防科技大学信息系统与管理学院,湖南长沙410073;空军雷达学院预警监视情报系,湖北武汉430019
【正文语种】中文
【中图分类】TP391.9
【相关文献】
1.基于改进粒子群算法的单预警机动态航迹规划 [J], 王国师;李强;吴长飞;吴逸
2.无人机气流振动下飞行航迹规划建模仿真 [J], 钟频
3.基于仿真的航迹规划联网威胁元建模方法 [J], 杜华桦;陈才强;李鑫;刘娟
4.基于仿真数据的航迹规划威胁建模方法研究 [J], 刘娟;王维平
5.低可探测性飞机威胁建模及航迹规划仿真研究 [J], 郭琳;周德云;汪凌霄
因版权原因,仅展示原文概要,查看原文内容请购买。

飞机结构仿真分析及其优化设计近年来,随着飞机制造技术的发展和飞机性能要求的提高,飞机结构仿真分析成为飞机结构设计和制造中的必要环节。
通过仿真分析,可以评估飞机结构的强度、疲劳寿命和耐损性等重要性能指标,从而指导优化设计。
本文将介绍飞机结构仿真分析的方法和优化设计的思路。
一. 飞机结构分析的方法飞机结构分析是通过计算机数值模拟方法,分析对结构的应力、位移、变形、振动、疲劳寿命等现象进行分析,并在此基础上对结构进行设计和优化。
具体来说,飞机结构分析可以分为以下几个步骤:1. 建立数值模型建立数值模型是飞机结构分析的第一步,其目的是将实际飞机结构抽象成数学模型,以便进行计算机仿真。
建立数值模型时,需要考虑飞机结构的各种几何和材料特性,如外形、结构布局、材料类型、初始条件等。
2. 网格划分飞机结构分析需要将结构抽象成一系列的单元,这些单元之间通过节点相互连接。
这种单元与节点的网格化可以大大简化计算负荷,减少计算时间。
在进行网格化时,需要根据飞机结构的几何和物理特性,选择适宜的单元尺寸和节点数量。
3. 边界条件设定在进行结构分析时,需要设定结构的边界条件,包括支撑、加载等信息。
这些边界条件需要准确地反映实际情况,以便保证分析的准确性。
4. 应力计算应力计算是飞机结构分析的重要环节,其目的是计算每个单元上的应力值。
应力计算需要考虑各种载荷因素,如自重、飞行荷载、风载等,以及外部因素,如温度、湿度、压力等。
为了提高计算精度,应该选用合适的应力计算方法,如有限元分析算法、热损伤感应算法等。
5. 变形和振动分析变形和振动分析是飞机结构仿真中的重要环节。
变形和振动分析旨在评估飞机结构在各种载荷情况下产生的位移和振动情况,以便检查结构是否满足性能要求。
变形和振动分析需要考虑不同载荷下结构的动态响应特性,对于不同类型的飞机,需要采用不同的分析方法。
6. 疲劳寿命评估疲劳寿命评估是飞机结构分析中的关键环节。
在飞机服役期间,受到载荷作用的飞机结构会出现疲劳损伤,从而导致安全隐患。
飞行器航迹规划技术研究及优化算法设计近年来,飞行器航迹规划技术的研究和优化算法设计取得了重大进展。
在飞行器的控制和导航中,航迹规划是一个至关重要的环节。
因此,如何进行航迹规划以实现安全、高效、准确和节能的飞行成为全球学术界和工业界共同关注的热点问题。
本文将从研究现状、方法分析和进一步的研究方向等方面进行阐述,以期对该领域的发展有所帮助。
一、研究现状航迹规划是指规划一种优化的路径来使得飞行器按照规划的路径进行运动。
这些路径必须满足多方面的要求,包括安全、节能、准确和高效等方面的要求。
近年来,随着计算机技术和优化算法的快速发展,航迹规划技术得到了极大的提升。
当前主要的研究方向包括:1. 基于模型预测控制的航迹规划:该方法主要是基于经典的模型预测控制理论,将所需要的航迹进行优化,最终得到一条准确性更高、安全性更好的航迹。
这种方法的主要缺点是计算速度慢,不适合实时应用。
2. 基于自适应实时优化的航迹规划:该方法主要是根据飞行器目前的状态实时地进行航迹变化,以便更好地适应不同的飞行环境。
这种方法的主要优点是计算速度快,适合相对实时的应用。
3. 基于遗传算法和人工神经网络的航迹规划:这种方法主要依靠遗传算法和人工神经网络对航迹进行优化,以达到最佳的效果。
这种方法的优势在于可以适应各种不同的飞行环境,但缺点在于计算速度慢,使用难度较大。
总体而言,目前航迹规划技术的研究取得了重大进展,但是依然存在着一定程度的局限性和问题。
进一步的研究和创新依然是必要的。
二、方法分析针对航迹规划技术的局限性和问题,需要进一步探讨可行的解决方法。
当前主要的方法包括:1. 基于深度学习和优化算法的航迹规划:深度学习是人工智能领域最热门的技术之一,可以用于提高对飞行器监控数据的分析和识别,以便更准确地进行航迹规划。
同时,引入优化算法可以增强航迹规划的效率和效果。
2. 基于有限状态机的航迹规划:有限状态机是控制系统中的一种基本抽象模型,可以用于描述和识别多种不同的飞行状态。
基于模型的系统工程在航电系统设计中的研究与仿真1. 引言1.1 研究背景航空电子系统作为航空航天领域中不可或缺的一部分,其设计与研发一直是工程技术领域中的重要问题。
随着航空航天技术的不断发展,航电系统的设计要求也越来越高,各种复杂性、安全性等方面的要求日益增加。
传统的航电系统设计方法往往存在一些问题,如设计过程中的不精确性、原型验证成本高等,因此迫切需要一种更加有效和精确的系统工程方法来支撑航电系统设计。
研究关于基于模型的系统工程在航电系统设计中的应用具有重要的研究意义。
通过深入探讨航电系统设计中基于模型的系统工程方法的应用,可以为航电系统设计提供更加有效的支持,提高设计效率、降低风险,推动航空电子技术的发展。
【研究背景】1.2 研究目的本文旨在探讨基于模型的系统工程在航电系统设计中的研究与仿真方法,旨在建立有效的航电系统设计模型,提高系统设计效率和质量。
具体目的包括:1. 分析航电系统设计中存在的问题和挑战,探讨传统方法在面对复杂系统设计时的局限性;2. 介绍基于模型的系统工程方法,在系统设计阶段通过建立模型来更好地理解系统,优化设计方案;3. 通过案例分析,验证基于模型的系统工程在航电系统设计中的应用效果,探讨其在实际工程中的可行性和有效性;4. 提出模型验证与评估的方法,保证设计模型的准确性和可靠性;5. 探讨系统工程在航电系统设计中的实际运用,为未来航空电子系统设计提供借鉴和参考。
通过以上研究目的,本文旨在为航电系统设计领域的研究和实践提供有益的理论参考和方法指导。
1.3 研究意义航空电子设备作为飞机系统的重要组成部分,对飞行安全和效率具有至关重要的影响。
基于模型的系统工程在航电系统设计中的研究与仿真具有重要的理论意义和实践价值。
基于模型的系统工程方法可以帮助工程师更好地理解航电系统的复杂性和系统整体性,有助于提高设计效率和准确性。
通过建立系统模型、进行仿真分析,可以在系统设计阶段发现问题,并针对性地进行改进,从而避免在后期开发和测试阶段出现严重的问题。
飞行器姿态控制系统设计及仿真近年来,随着无人机技术的快速发展,飞行器姿态控制系统的设计和仿真成为了一个备受关注的领域。
飞行器姿态控制系统是无人机飞行过程中保持稳定的重要组成部分,它能够通过精确的姿态控制来实现飞行器的稳定飞行和各种机动动作。
本文将介绍飞行器姿态控制系统的设计原理和步骤,并通过仿真验证其性能。
一、飞行器姿态控制系统的设计原理飞行器姿态控制系统的设计原理主要基于控制理论和传感器技术。
控制理论提供了一种系统动力学建模和控制器设计的理论基础,而传感器技术能够提供准确的姿态信息,为控制系统提供反馈信号。
在飞行器姿态控制系统设计中,常用的控制方法包括PID控制和模型预测控制。
PID控制是一种经典的控制方法,通过测量当前状态与目标状态的误差,综合考虑比例、积分和微分三个部分,计算出控制输出。
模型预测控制则是基于飞行器的数学模型,通过预测未来一段时间内的状态变化,计算出最优的控制策略,从而实现姿态控制。
二、飞行器姿态控制系统的设计步骤1. 系统动力学建模飞行器姿态控制系统的设计首先需要进行系统动力学建模。
根据飞行器的物理特性和运动方程,建立数学模型。
常见的模型包括刚体模型、欧拉角模型和四元数模型。
选择合适的模型能够更好地描述飞行器的运动特性。
2. 控制器设计根据系统模型,选择适当的控制方法进行控制器设计。
常用的控制方法有PID控制和模型预测控制。
PID控制是一种简单而有效的方法,但对于复杂的飞行器姿态控制来说,模型预测控制能够提供更好的性能。
根据系统的需求和性能指标,设计合适的控制器参数。
3. 传感器选择飞行器姿态控制系统需要依赖传感器来获取准确的姿态信息。
常用的传感器包括加速度计、陀螺仪和磁力计等。
根据飞行器的需求和环境条件,选择合适的传感器,并进行校准和数据处理,以提供准确的姿态反馈。
4. 闭环控制设计好控制器和选择好传感器后,将其组合成一个闭环控制系统。
将传感器获取的姿态信息与目标姿态进行比较,计算出控制输出,通过执行机构来实现姿态控制。
2019年第6期单博楠等:预警机典型巡逻航线下探测性能分析及评估633综上,本文建议预警机在执行预警探测任务中,采用圆形航线巡逻飞行。
当不能飞圆形航线时,可采用跑道形或8字形航线。
当需要环绕重点区域的巡逻方式,以便全方位监视时,可以采用三角形航线。
本文的不足之处有:对8字形航线和三角形航线的建模还比较简单,没有详细考虑转弯的影响。
实际飞行中,载机运动遵循空气动力学特性且具有 惯性,并不能按照规整的三角形飞行。
分析径向速 度盲区时,仅考虑了目标做匀速直线运动的情况,未考虑变速运动和机动转弯等复杂情况。
在实际应用中,可以通过建立目标的运动模型,预测径向盲速, 并采取措施补偿或规避。
此外,本文未考虑各种航线飞行操作的难易程度,如圆形航线对惯导和飞行员的要求较高等。
在以后的工作中将完善以上 不足。
参考文献:[1] 曹晨.预警机一信息化战争的空中帅府[M].北京:电子工业出版社,2009.[2] 叶海军,雷川.E-2D 预警机形成初始作战能力的实质[J].指挥与控制学报,2017, 3(2): 165-170.[3]王国师,李强,杨征,吴长飞.单预警机静态航迹规划建模与仿真[J].工程设计学报,2011, 18(4):275-281.[4] 王国师,李强,吴长飞,吴逸.基于改进粒子群算法的单预警机动态航迹规划[J].火力与指挥控制,2012, 37(6) :25-30.[5] 吴福初,翟海清,单岳春.岛礁要地反空袭作战中预 警机巡逻空域的设置[J].指挥控制与仿真,2018, v. 40; No. 273(03) :20-24.[6] 祁炜,李侠,蔡万勇,等.多预警机协同作战空域配置 [J].中国电子科学研究院学报,2016, 11 (5): 547-553.[7] 王国师,李强,贺玲,et al.某型机载预警雷达盲区计算模型研究[J].雷达科学与技术,2010, 08(6):491-498.[8] 焦广伦,陆军.机载脉冲多普勒雷达探测性能的评估 [J].电讯技术,2009 , 49(11):80-84.[9]焦广伦.脉冲多普勒雷达探测的速度盲区仿真系统[J].电子测量技术,2008, 31(9):10-13.作者简介单博楠(1989—),女,天津人,博士,工程师,主要研究方向为系统总体设计;E-mail : shanbonan@ foxmail, com傅宇龙( 1989—),男,天津人,博士,工程师,主要研究方向为应用数学;叶海军( 1979-),男,安徽人,硕士,高工,主要研究方向为空基信息系统设计;乔永杰(1976—),男,山西人,博士,研究员,主要研究方向为系统总体设计。
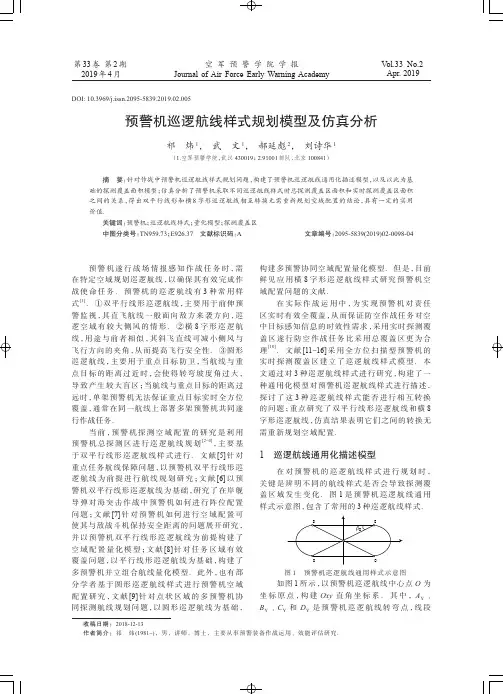
第2期2021年2月Journal of CA EITV ol. 16 N o . 2 Feb. 2021doi : 10. 3969/j. issn. 1673-5692. 2021.02. 008预警机巡逻航线规划问题建模与仿真分析李相如,曹晨,罗琪械(中国电子科学研究院,北京100041)摘要:预警机巡逻航线规划是预警机任务规划中的一个环节,对预警机巡逻航线进行合理的规 划,可以更好地掌握目标区域附近的空情,提高重点任务情报与指控能力。
文中将预警机巡逻航线 规划分为巡逻空域规划,巡逻航线规划和飞行航线规划三个环节;并着眼于前两个环节分析了预警机三种典型巡逻航线及其探测性能;在此基础上,给出预警机典型巡逻空域与巡逻航线规划流程与 方法,基于文中开发的工具已初步用于预警机活动空域和巡逻航线的规划。
关键词:预警机;巡逻航线;航线规划中图分类号:E926. 37;TN957.51 文献标志码:A文章编号:1673-5692(2021 )02-1534)4Modeling and Simulation Analysis of Patrol Route Planning for AWACSLI Xiang-ru, CAO Chen, LUO Qi-nan(China Academ y of Electronics and Inform ation Technology, Beijing 100041 , China)Abstract : Patrol route planning is a link in the task planning of AWACS. The Reasonable planning of patrol route can better grasp the air situation near the target area and improve the intelligence and control. This paper divided patrol route planning into three part : patrol airspace planning, patrol route planning and flight route planning. Focusing on the first two aspects, three typical patrol routes and their detection performance of AWACS are analyzed. On this basis, the typical patrol airspace and route planning process and method are given. The tool based on this paper has been initially used in the planning of active airspace and patrol routes of AWACS.Key words : AWACS ; patrol route ; route planning〇引言预警机是集情报探测、指挥控制于一体的大型 综合电子信息系统,是空中作战机群的核心,在现代 化战争中发挥着越来越重要的作用。
航电系统仿真方案1. 引言航电系统是现代飞机上至关重要的一个子系统,它负责飞机的导航、自动驾驶、通信和显示等功能。
为了确保航电系统在实际飞行中的准确性和可靠性,飞机制造商和航空公司通常使用仿真技术进行系统验证和测试。
本文将介绍一种航电系统仿真方案,旨在实现对航电系统的全面测试。
2. 仿真环境搭建2.1 仿真平台选择在航电系统仿真方案中,选择一个合适的仿真平台非常重要。
常用的仿真平台有MATLAB/Simulink、LabVIEW和PSCAD等。
根据仿真需求和项目预算,选择一个功能强大、易于使用且具有良好性能的仿真平台。
2.2 仿真模型建立仿真模型的建立是航电系统仿真方案的核心部分。
首先,根据实际飞机的物理特性和航电系统的功能要求,建立相应的数学模型。
然后,使用选定的仿真平台,利用数学建模工具或编程语言编写仿真模型。
2.3 环境参数配置在进行航电系统仿真时,需要配置适当的环境参数,以模拟飞行过程中的不同工况和环境条件。
这些参数包括飞行速度、海拔高度、气温、湿度等。
通过配置合适的环境参数,可以评估航电系统在不同条件下的性能和稳定性。
3. 仿真测试方案3.1 功能测试航电系统的功能测试是确保系统符合设计要求的关键步骤。
其中包括导航功能测试、自动驾驶功能测试、通信功能测试和显示功能测试等。
通过在仿真模型中输入特定的输入信号,并对输出结果进行分析和验证,可以评估航电系统的功能是否正常。
3.2 性能测试除了功能测试,对航电系统的性能评估也是非常重要的。
性能测试包括系统响应时间、精度、稳定性和抗干扰能力等方面的考察。
通过在仿真模型中引入不同的干扰信号、评估系统的响应速度和精度,可以得出航电系统在各种情况下的性能指标。
3.3 故障模拟测试航电系统的故障模拟测试是为了验证系统在面对故障时的自愈能力。
通过在仿真模型中引入各种可能的故障情况,并观察系统对故障的响应和恢复能力,可以评估航电系统的可靠性和鲁棒性。
4. 结果分析和验证在完成航电系统仿真测试后,需要对仿真结果进行分析和验证。
航空航天工程师在航空航天系统设计中的系统模型建立与系统仿真分析方法航空航天工程师在航空航天系统设计中的系统模型建立与系统仿真分析方法一直是一个关键的研究领域。
系统模型建立和仿真分析是航空航天系统设计中至关重要的步骤,它们可以帮助工程师在设计过程中评估系统的性能、验证设计方案的可行性,并优化设计以满足需求。
本文将介绍一些常用的系统模型建立与系统仿真分析方法。
一、系统模型建立方法1. 静态模型建立方法静态模型建立是描述系统状态和特性的基本方法之一。
在航空航天系统设计中,静态模型可以用于描述系统的几何结构、重力、负载和耐力等基本特性。
常用的静态模型建立方法包括数学建模、物理建模和几何建模。
数学建模是使用数学方程和模型来描述系统行为的方法。
航空航天工程师可以利用数学公式和参数进行建模,通过求解方程组来估算设计方案在不同条件下的响应。
物理建模是基于物理原理和规律来建立系统模型的方法。
例如,通过牛顿运动定律来描述飞行器的运动特性,通过热传导方程来分析航空引擎的热管理。
几何建模是基于几何形状和结构来建立模型的方法。
航空航天系统的结构和外形特征对系统性能和气动特性有很大影响,因此几何建模是不可或缺的一种模型建立方法。
2. 动态模型建立方法动态模型建立是描述系统动态响应和行为的方法。
在航空航天系统设计中,动态模型可以用于描述系统的运动特性、振动特性和控制系统响应等。
常用的动态模型建立方法包括传递函数建模、状态空间建模和时域仿真建模。
传递函数建模是一种常见的动态模型建立方法,它基于系统输入输出之间的关系建立传递函数模型。
通过分析系统的传递函数,航空航天工程师可以评估系统的稳定性、频率响应和阻尼特性等。
状态空间建模是一种描述系统状态演化的方法。
它基于系统的状态变量和状态方程来建立系统的动态模型。
状态空间模型可以提供更多关于系统内部状态和响应的信息,对于系统控制和优化具有重要意义。
时域仿真建模是一种基于数值计算的模型建立方法。
基于虚拟现实的航空仿真系统设计与实现概述随着科技的进步,虚拟现实(Virtual Reality,VR)技术迅速发展并广泛应用于各个领域。
其中,虚拟现实在航空仿真系统设计与实现方面扮演着重要角色。
本文将介绍基于虚拟现实的航空仿真系统的设计与实现,并探讨其在飞行培训、飞行模拟等方面的应用。
1. 虚拟现实技术的基本概念虚拟现实技术是一种通过计算机生成的仿真环境,能够模拟真实世界或虚构世界,让用户通过多感官的交互,沉浸在一个与现实世界完全不同的虚拟空间中。
虚拟现实技术通常包括3D图像生成、多通道感知技术和交互设备等核心组成部分。
2. 基于虚拟现实的航空仿真系统的设计与实现2.1. 硬件设备搭建基于虚拟现实的航空仿真系统的设计,首先需要搭建相应的硬件设备。
这包括一个高性能的计算机、虚拟现实头显设备、触觉反馈设备以及其他的交互设备。
同时,还需要一个专门设计的飞行模拟座舱,以提供更真实的体验感。
2.2. 软件系统开发在硬件设备搭建完成后,需要进行软件系统的开发。
这包括航空模型的建立、飞行动力学模型的开发、场景生成与渲染、用户交互界面开发等。
通过这些软件模块的开发与集成,可以实现基于虚拟现实的航空仿真系统的完整功能。
2.3. 数据集成与处理虚拟现实的航空仿真系统需要集成大量的数据,如地形数据、天气数据、飞行器模型数据和飞行器性能数据等。
这些数据需要经过预处理和集成处理,以便在整个仿真系统中实现高质量的图像渲染和真实感触感。
3. 基于虚拟现实的航空仿真系统在飞行培训中的应用虚拟现实的航空仿真系统在飞行培训中具有重要意义。
通过虚拟现实技术,飞行学员可以在安全的环境下进行训练,模拟各种飞行场景和紧急情况。
这不仅可以提高飞行员的反应能力和应对危险情况的能力,还可以节约大量的时间和资源。
4. 基于虚拟现实的航空仿真系统在飞行模拟中的应用虚拟现实的航空仿真系统在飞行模拟中也具有广泛的应用。
通过虚拟现实技术,飞行员可以进行复杂的飞行任务和飞行器操作的训练,如起飞、降落、空中操纵等。
单预警机静态航迹规划建模与仿真
作者:王国师, 李强, 杨征, 吴长飞, WANG Guo-shi, LI Qiang, YANG Zheng,, WU Chang-fei
作者单位:王国师,WANG Guo-shi(空军雷达学院研究生管理大队,湖北武汉,430019), 李强,吴长飞,LI Qiang,WU Chang-fei(空军雷达学院预警监视情报系,湖北武汉,430019), 杨征,YANG Zheng,(国防科技大学信息系统与管理学院
,湖南长沙,410073)
刊名:
工程设计学报
英文刊名:Journal of Engineering Design
年,卷(期):2011,18(4)
1.郦能敬预警机系统导论 1998
2.PENG Jian-liang.ZHU Fan.SUN Xiu-xia On route-planning of UAV based on discrete PSO and voronoi diagram 2007
3.XU Zheng-jun.TANG Shuo UAV path planning based on adaptive genetic algorithm[期刊论文]-Journal of System Simulation 2008(19)
4.KEVIN P BOLLINO.RYAN L Lewis Collision-free multi-UAV optimal path planning and cooperative control for tactical applications 2008
5.张忠峰.高云峰基于粒子群优化的高超声速飞行器航迹规划[期刊论文]-系统仿真学报 2009(08)
6.刘娟.赵新.霄永林基于指数法的导弹航迹规划空间威胁建模研究[期刊论文]-系统仿真学报 2009(17)
7.于会.于鑫.李伟华基于粒子群优化算法的航迹规划与重规划[期刊论文]-计算机工程 2009(15)
8.JAMES Kennedy.RUSSELL Eberhart Particle swarm optimization 1995
9.SHI Y.EBERHART R A modified particle swarm optimization 1998
10.HUX,EBERHART R Multiobjective optimization using dynamic neighborhood particle swarm optimization 2002
11.RATNAWEERA A.HALGAMUGE S K.WATSON HC Self-organizing hierarchical particle swarm optimizer with time-varying acceleration coefficients 2004(03)
12.王维平.刘娟无人飞行器航迹规划方法综述[期刊论文]-飞行力学 2010(02)
本文链接:/Periodical_gcsj201104009.aspx。