UG动画仿真简单实例图文教程
- 格式:docx
- 大小:1.28 MB
- 文档页数:6
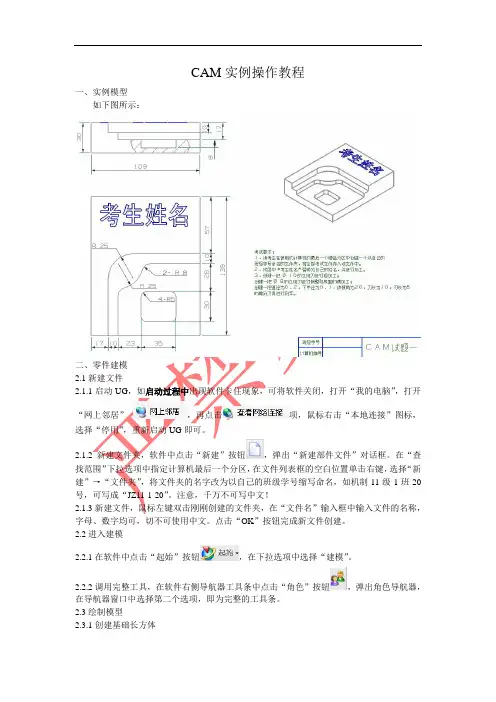
CAM实例操作教程一、实例模型如下图所示:二、零件建模2.1新建文件2.1.1启动UG,如启动过程中出现软件卡住现象,可将软件关闭,打开“我的电脑”,打开“网上邻居”,再点击项,鼠标右击“本地连接”图标,选择“停用”,重新启动UG即可。
2.1.2新建文件夹,软件中点击“新建”按钮,弹出“新建部件文件”对话框。
在“查找范围”下拉选项中指定计算机最后一个分区,在文件列表框的空白位置单击右键,选择“新建”→“文件夹”,将文件夹的名字改为以自己的班级学号缩写命名,如机制11级1班20号,可写成“JZ11-1-20”。
注意,千万不可写中文!2.1.3新建文件,鼠标左键双击刚刚创建的文件夹,在“文件名”输入框中输入文件的名称,字母、数字均可,切不可使用中文。
点击“OK”按钮完成新文件创建。
2.2进入建模2.2.1在软件中点击“起始”按钮,在下拉选项中选择“建模”。
2.2.2调用完整工具,在软件右侧导航器工具条中点击“角色”按钮,弹出角色导航器,在导航器窗口中选择第二个选项,即为完整的工具条。
2.3绘制模型2.3.1创建基础长方体点击“草图”按钮,点击鼠标中键确认,点击“矩形”工具按钮,绘制一个矩形(屏幕中点击左键确定矩形第一个点,移动鼠标,再次点击鼠标左键,确定第二个矩形对角点)。
约束矩形尺寸,点击“自动判断的尺寸”按钮,鼠标左键点选矩形的一条边,会出现跟随鼠标移动的尺寸线,在屏幕空白位置点击左键,尺寸线被放置,同时出现参数输入文本框,根据图纸输入尺寸数值,点击鼠标中键,确认尺寸。
同样方法,约束矩形的另外一条边。
约束完毕如下图所示。
退出草图,点击“完成草图”按钮,退出草图界面。
拉伸草图曲线,将鼠标移动到刚刚绘制的草图曲线上,曲线会变成粉色,点击鼠标右键,在弹出的列表中选择“拉伸”按钮,弹出拉伸参数对话框,根据图纸要求,将对话框中“起始值”设为“0”,“终止值”设为“30”。
如下图所示,点击“确定”按钮,完成长方体创建。
UGNX绘制一个小球分流机构并进行仿真验证
依一老师1分钟前
今天来做一个趣味小球分流机构的运动仿真,无外力控制就能把一堆小球小球按照下落顺序进行分离,整个模型建模比较简单,仿真也是,小伙伴们来挑战一下吧!
建模图纸
1.底座建模,非常简单,拉伸即可
2.摇摆挡板建模,一个拉伸
3.两个小球,直径30mm.设计特征插入一个球即可
进行装配
固定好底座后,进行简单的约束,小球位置随意摆放,不发生干涉即可。
运动仿真
首先进入运动仿真模块,开始我们的运动仿真三部曲。
1.首先确定要动的物体,其中有两个小球和挡板,分别都设为运动体(连杆)
2.接下来判断他们怎么动,挡板是绕着圆柱左右摇摆,所以是旋转副
小球是在滑道内进行下落,所以做两个平面副即可
3.因为小球与滑到以及挡板会发生碰撞,所以添加3D接触。
两个球同样的设置后,给挡板与滑道也加上3D接触
4.因为小球是自由落体运动,所以驱动就是重力了,直接新建结算方案,设定重力的方向
5.求解后就就能播放动画了。
通过改动小球及挡板质量会有不同的效果哦,在设计产品时需注意。
是不是很简单的运动仿真小案例,掌握UG八大模块知识点,什
么案例都难不到你!。

例:一、曲柄滑块机构1.连杆1—500*10*20的长方体,俩端倒R10及¢10*2孔如图:2.连杆2---20*10*80的长方体,俩端倒R10,凸台2-¢10*10(高10)如图:3.连杆3---200*10*20的长方体,俩端倒R10及¢10*2孔如图:4.滑块—50*40*30的长方体,30*40的面上放置腔槽20*10*50;40*50的面上放置¢10*高10的凸台如图二、装配。
新建部件文件,注意单位mm三、动画1.应用—运动--- 方案浏览器–master –右键---新方案—取消连杆/刚体--定义连杆,连杆1固定,依次定义序号为001到004,每次选“应用”最后“取消”2.运动副—旋转副—第一连杆选连杆1/ 过滤器选点(圆心),再选矢量(+Y)/ 运动驱动选恒定的,速度给1000/第二连杆选连杆2/应用同理,运动副—旋转副—第一连杆选连杆2/ 过滤器选点(圆心),再选矢量(+Y)/ 运动驱动选否/第二连杆选连杆3/应用上图右同理,运动副—旋转副—第一连杆选连杆3/ 过滤器选点(圆心),再选矢量(+Y)/ 运动驱动选否/第二连杆选滑块/应用3.滑块的运动运动副—滑动副—第一连杆选连杆1/ 过滤器选点(圆心),再选矢量(+X)/ 运动驱动选否/第二连杆选滑块/应用5.动画上图右时间,步数改好确定6.运动7.动画剪辑:方案浏览器—右击structures---输出—选格式MPEG---指定文件名---输入名—OK二、俩滑板的运动滑板---500*80*101.先装配好2.应用—运动--- 方案浏览器–master –右键---新方案—取消3.连杆/刚体—定义滑板1(固定)--应用--定义滑板2---应用上图右4.运动副—滑动副—第一连杆选滑板1/ 过滤器选点,再选矢量(X)/ 运动驱动选恒定的,速度给100---第二连杆选滑板2/应用5.动画时间,步数改好确定6.运动7.动画剪辑:方案浏览器—右击structures---输出—选格式MPEG---指定文件名---输入名—OKWelcome To Download !!!欢迎您的下载,资料仅供参考!。
ug nx motion机构运动仿真基础及实例
UGNXMotion机构运动仿真是一种基于UGNX软件平台的机构运动分析工具,它能够模拟机构的运动及其相应的反应,为机构设计和优化提供有效的工具支持。
本文将介绍UG NX Motion机构运动仿真的基本原理和操作方法,并通过实例详细说明其应用。
首先,本文将介绍机构运动仿真的基本理论,包括机构运动的分类、运动学和动力学基本概念、运动仿真的基本流程等,以帮助读者更好地理解机构运动仿真的原理和方法。
接着,本文将详细介绍UG NX Motion机构运动仿真的操作方法,包括建立机构模型、定义运动和负载条件、设定仿真参数、运行仿真和分析仿真结果等。
通过这些操作,读者将能够熟练地使用UG NX Motion机构运动仿真工具进行机构设计和优化。
最后,本文将通过实例详细说明UG NX Motion机构运动仿真的应用,包括平面机构、空间机构、连杆机构等。
通过这些实例,读者将能够更加深入地了解UG NX Motion机构运动仿真的能力和优势,为机构设计和优化提供更加有效的支持。
综上所述,《UG NX Motion机构运动仿真基础及实例》将为读者介绍机构运动仿真的基本原理和操作方法,并通过实例详细说明其应用,为机构设计和优化提供有效的工具支持。
- 1 -。

点击选择“运动仿真模块”打开左边第一个导航,右键点击新建仿真弹出如下对话框在点击确定,等待数秒钟(等待时间根据装配图复杂程度而定)建立连杆点击连杆弹出如图对话框在固定连杆前打勾然后再装配图上选择要固定的连杆,固定的连杆选完后在点击接着就到选择活动的连杆了,在选择活动连杆前把固定连杆前的勾去掉,然后选择活动的连杆,选择好了连杆后点击应用(记得对话框固定连杆前的勾去掉,)接着在选择另一个连杆选完后再点击。
直到选完连杆后点确定建立运动副点击打开弹出对话框在类型里选择需要的运动副,比如然后选择需要滑动副的连杆,然后点击指定原点在如下图所示的下拉菜单里找到相应放置坐标原点的位置然后点击在下拉菜单里选择相应的方向点击驾驶员设置动力,弹出对话框,在平移下拉菜单里选择相应的运动要求,当要选择函数时,点击函数弹出对话框接着点击再点击f(x)函数管理器,弹出对话框点击新建弹出对话框在插入下拉菜单里选择需要的函数在选择相应的函数然后在双击它,然后框中有相应的函数公式在函数中填入相应的参数如图所示然后点击3次确定,在在回到建模桌面,完成一个连杆的运动副及动力的设置再设置一个滑动副框在类型里选择需要的运动副,比如然后选择需要滑动副的连杆,然后点击指定原点在如下图所示的下拉菜单里找到相应放置坐标原点的位置选择好后,点击指定方位然后点击在下拉菜单里选择相应的方向点击驾驶员设置动力,弹出对话框,在平移下拉菜单里选择相应的运动要求,当要选择函数时,点击函数弹出对话框接着点击再点击f(x)函数管理器,弹出对话框点击新建弹出对话框在插入下拉菜单里选择需要的函数在选择相应的函数然后在双击它,然后框中有相应的函数公式在函数中填入相应的参数如图所示然后点击次确定选择刚建立的函数第二项函数,呈蓝色的刚刚建立的函数呈“蓝色”然后点击确定再次点击,回到建模桌面,又完成个运动副及动力设置。
其他的运动副的设置及动力设置,操作过程都大同小异。
仿真调试然后开始调试点击顶部的解决方案弹出对话框在对话框里的时间步数填入相应的数据然后点击“确定”点击顶部菜单栏“求解”,更新状态(等一秒钟左右的)开始调试了,点击顶部菜单栏的“动画”弹出对话框点击“播放”期待的时刻到了。
CAM实例操作教程一、实例模型如下图所示:二、零件建模2.1新建文件2.1.1启动UG,如启动过程中出现软件卡住现象,可将软件关闭,打开“我的电脑”,打开“网上邻居”,再点击项,鼠标右击“本地连接”图标,选择“停用”,重新启动UG即可。
2.1.2新建文件夹,软件中点击“新建”按钮,弹出“新建部件文件”对话框。
在“查找范围”下拉选项中指定计算机最后一个分区,在文件列表框的空白位置单击右键,选择“新建”→“文件夹”,将文件夹的名字改为以自己的班级学号缩写命名,如机制11级1班20号,可写成“JZ11-1-20”。
注意,千万不可写中文!2.1.3新建文件,鼠标左键双击刚刚创建的文件夹,在“文件名”输入框中输入文件的名称,字母、数字均可,切不可使用中文。
点击“OK”按钮完成新文件创建。
2.2进入建模2.2.1在软件中点击“起始”按钮,在下拉选项中选择“建模”。
2.2.2调用完整工具,在软件右侧导航器工具条中点击“角色”按钮,弹出角色导航器,在导航器窗口中选择第二个选项,即为完整的工具条。
2.3绘制模型2.3.1创建基础长方体点击“草图”按钮,点击鼠标中键确认,点击“矩形”工具按钮,绘制一个矩形(屏幕中点击左键确定矩形第一个点,移动鼠标,再次点击鼠标左键,确定第二个矩形对角点)。
约束矩形尺寸,点击“自动判断的尺寸”按钮,鼠标左键点选矩形的一条边,会出现跟随鼠标移动的尺寸线,在屏幕空白位置点击左键,尺寸线被放置,同时出现参数输入文本框,根据图纸输入尺寸数值,点击鼠标中键,确认尺寸。
同样方法,约束矩形的另外一条边。
约束完毕如下图所示。
退出草图,点击“完成草图”按钮,退出草图界面。
拉伸草图曲线,将鼠标移动到刚刚绘制的草图曲线上,曲线会变成粉色,点击鼠标右键,在弹出的列表中选择“拉伸”按钮,弹出拉伸参数对话框,根据图纸要求,将对话框中“起始值”设为“0”,“终止值”设为“30”。
如下图所示,点击“确定”按钮,完成长方体创建。