第2章 机器人的机构与分类
- 格式:pptx
- 大小:8.08 MB
- 文档页数:2

机器人技术基础复习要点第一章:绪论1.机器人分类:按开发内容与应用分为工业机器人,操纵型机器人,智能机器人;按发展程度分为第一代,第二代和第三代机器人;按性能指标分为超大型,大型。
中型。
小型和超小型机器人;按结构形式分为直角坐标型机器人,圆柱坐标型机器人,球坐标型机器人和关节坐标型机器人;按控制方式分为点位控制和连续轨迹控制;按驱动方式分为气力驱动式,液力驱动式和电力驱动式。
按机座可动分类分为固定式和移动式。
2.机器人的组成:驱动系统,机械系统,感知系统,控制系统,机器人-环境交互系统,人机交互系统。
3.机器人的技术参数:自由度:是指机器人所具有的独立坐标轴的数目;精度:主要依存于机械误差,控制算法误差与分辨率系统误差;重复定位精度;是关于精度的统计数据;工作范围:指的是机器人手臂末端或手腕中心所能达到的所有店的集合;最大工作速度:不同厂家定义不同,通常在技术参数中加以说明;承载能力:指的是机器人在工作范围内的任何位姿上所能承受的最大质量。
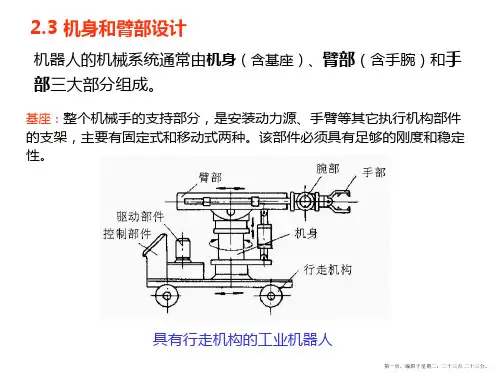
第二章:机器人本体结构1.机器人本体基本结构:传动部件,机身及行走机构,臂部,腕部,手部。
2.机器人本体材料的选择:强度高,弹性模量大,质量轻,阻尼大,经济性好。
3.机身设计要注意的问题:刚度和强度大;动灵活,导套不宜过短,避免卡死;驱动方式适宜;结构布置合理。
4.臂部的基本形式:机器人的手臂由大臂,小臂所组成,手臂的驱动方式主要有液压驱动,气动驱动和电动驱动几种形式,其中电动驱动最为通用;臂部的典型机构有臂部伸缩机构,手臂俯仰运动机构,手臂回转与升降机构。
5.臂部设计需要的注意的问题:足够的承载能力;刚度高;导向性能好,运动迅速,灵活,平稳,定位精度高;重量轻,转动惯性小;合理设计与腕部和机身的连接部位。
6.机器人的平稳性和臂杆平衡方法:机身和臂部的运动较多,质量较大,如果运动速度和负载游较大,当运动状态变化时,将产生冲击和振动。
这将仅影响机器人的精确定位,甚至会使其不能正常运转。

《机器人学》课程教学大纲、课程基本信息二、课程目标(一)总体目标:机器人学是智能制造工程专业培养计划中一门高度交叉、前沿的重要专业必修课程,融合了运动学/动力学分析、机械学、控制理论与工程、计算机技术、人工智能等多学科内容的综合性新技术应用课程.通过该课程的学习,使学生了解并掌握机器人学相关的基本理论和方法,具有现代机器人系统设计、分析、应用等基本能力和以后从事相关科学研究和技术工作的能力。
本课程针对智能制造工程专业的特点,主要介绍机器人数学基础、工业机器人、服务机播人的基本机械结构设计、运动学与动力学分析,以及机器人传感器和控制技术等基础理论和技术基础知识,并以实际工程应用为背景,安排各类机器人实样参观、专题讲座、实验等内容。
通过本课程教学,不但使学生掌握机器人技术的基本理论知识,使学生对各类机器人技术和开发方法有所了解,同时通过课程设计等活动培养其在逻辑思维、科学研究和设计实践上的能力,从而培养学生综合运用机器人技术解决智能制造领域实际工程问题的能力。
(二)课程目标:课程目标1:学习并掌握现代机器人的基本理论及方法,具有应用机器人解决工程问题的创新意识和能力;(支撑毕业要求1)课程目标2:学习并掌握工业机器人、服务机器人的状态检测和控制技术,具有利用先进控制理论和方法进行机器人控制并完成具体工程应用的能力;(支撑毕业要求2)课程目标3:学习并掌握现代机器人的总体设计、技术设计和详细结构设计及控制系统设计等内容,具有根据实际工程问题设计相应机器人解决方案的能力:(支撑毕业要求3)课程目标4:评定方法包括课后作业(15%)、实验(20%)、项目研究(15%)和期末考试(50%)环节,总评成绩以百分计,满分100分,各考核环节所占分值比例和根据具体情况微调。
2.(三)评分标准通过机器人的实验,获得相关实验设计和实验技能的基本训练,具有应用相关实验方法解决实际工程问题的能力。
(支撑毕业要求5)(三)课程目标与毕业要求、课程内容的对应关系三、教学内容第1章:绪论(3学时)通过本章内容的教学,使学生了解机器人学的起源与发展,讨论机器人学的定义,分析机器人的特点、结构与分类。
《机器人技术基础》课程教学大纲一、课程名称(中英文)中文名称:机器人技术基础英文名称:Robotic Technology Foundation二、课程编码及性质课程编码:0801051课程性质:选修课三、学时与学分总学时:32学分:2.0四、先修课程机械原理、机械设计、材料加工工程、工业控制五、授课对象本课程面向材料成型及控制工程专业学生开设,也可以供机械科学与工程专业和机电一体化专业学生选修。
六、课程教学目的(对学生知识、能力、素质培养的贡献和作用)本课程是本专业的核心选修课程之一,其教学目的主要包括:1. 系统全面掌握机器人技术专业知识,具备应用这些知识分析、解决机器人应用中的系统集成及其自动化控制等复杂问题的能力;2. 掌握机器人概况、机器人学的数学基础、机器人运动学、机器人动力学、机器人控制原则与方法、机器人在材料成型加工中的应用以及人工智能,具备针对不同需求设计机器人集成制造/加工系统的能力;3. 理解不同机器人系统架构的特点与共性问题,掌握机器人路径规划与离线仿真分析方法,具备机器人集成系统的性能分析与评价能力;4. 了解机器人技术的发展前沿,掌握其在机械制造、材料成型、医疗、电子、航空航天与资源开发等行业的发展特点与动向,具备研发机器人制造/加工的基础与能力。
表1 课程目标对毕业要求的支撑关系七、教学重点与难点:教学重点:1)机器人应用范围非常广泛,其形式与结构等也多种多样,本课程以介绍机器人系统结构、设计与控制为主体,以讲述机器人集成制造/加工系统为重点;2)在全面了解与掌握机器人系统种类及结构特点的基础上,重点学习机器人系统设计与控制技术、机器人路径规划、离线仿真以及集成系统设计与实现;3)课程将重点或详细介绍机器人在机械制造、材料加工工程、先进制造中的典型应用,而对较普遍应用的系统仅作简要介绍或自学。
4)重点学习的章节内容包括:第3章“机器人运动学与动力学”(4学时)、第4章“机器人的驱动与控制”(4学时)、第5章“机器人轨迹规划及离线仿真”(4学时)第6章“工业机器人应用”(8学时)第7章“机器人系统集成技术”(4学时)。