基于X3D_VRML的飞机螺旋桨机构运动仿真
- 格式:pdf
- 大小:370.29 KB
- 文档页数:3

投稿信箱:******************.cn基于CAXA V2013的螺旋桨三维建模与多轴编程技术□广东省工商高级技工学校 郎永兵螺旋桨是指靠桨叶在空气中旋转将发动机转动功率转化为推进力的装置,或有两个或较多的叶与毂相连,叶向后的一面为螺旋面或近似于螺旋面的一种船用推进器。
螺旋桨分为很多种,应用十分广泛,如飞机、轮船等。
螺旋桨模型的工程图如图1所示,以国产CAD/CAM软件CAXA制造工程师2013为例,其建模、编程具体操作如下。
一、图样分析如图1所示,该螺旋桨由中间的毂与3个螺旋叶片组成。
其中,中间的毂由圆柱、半椭球等组成;螺旋叶片是基于螺距80mm、圈数0.7mm、半径65mm的螺旋线两边偏置1mm的两叶片曲线与螺距80mm、圈数0.7mm、半径21.5mm的螺旋线两边偏置3.5mm的两叶片曲线而形成的三维直纹螺旋曲面,结合CAXA软件建模可得螺旋叶片的叶片曲线是由半径65mm 螺旋线与半径21.5mm螺旋线组成的直纹螺旋面向两边等距1mm与等距3.5mm后形成的等距面上的边界曲线;螺旋叶片的端部倒圆角R25mm,与中间毂倒圆角R7.5mm,叶片外部轮廓倒圆角R1mm。
螺旋桨模型的加工依据其加工部位、模型构建过程与装夹方式可简单划分为以下几个部分:①螺旋桨底部的加工;②螺旋桨整体开粗;③顶部曲面(椭球面)精加工;④叶片外部边沿R25mm、R7.5mm和R1mm倒圆角加工;⑤叶片精加工;⑥叶片底部边沿R7.5mm倒圆角加工;⑦叶片中间柱面槽精加工;⑧R6mm倒圆角加工。
图1 螺旋桨模型工程图二、螺旋桨三维模型构建螺旋桨的三维模型构建步骤主要由中间基础模型、叶片模型与模型细节处理(倒角、过渡)3个部分组成。
根据螺旋桨模型工程图(图1)完成螺旋桨三维建模,具体创建和操作如下。
1.中间基础模型构建在X-Z平面建立基础模型草图,应用软件二维绘图功能【直线】和【椭圆】完成草图绘制;使用【旋转增料】完成回转体模型构建,选择【打孔】功能完成中间基础模型的构建,如图2所示。

基于FlightGear的三维可视化飞行控制仿真实验平台的设计杨姗姗;王彪【摘要】Based on a classic six-degree fixed wing aircraft,a flight control experimental platform based on FlightGear simulator is presented in this paper.Aircraft model and flight control GUI are written based onMatlab/Simulink,and flight simulation data are fed to the FlightGear simulator through its I/O port,then the real-time 3D visual flight simulation is implemented.At the meantime,the curves of the flight parameters are obtained in the flight GUI,the relevance between mathematical variables and their physical meanings can be enhanced and the understanding of the linking theory with practical can be improved.The simulator presented in this paper has high openness,and can be not only operated by teachers for demonstration but also can be used by students for designing flight systems with different difficulty rating.Therefore,the ability of the application of the aircraft control theory can be advanced.%以某种典型的六自由度固定翼飞机模型为基础,设计并建立了基于FlightGear的三维可视化飞行控制仿真实验平台.该平台基于Matlab/Simulink编写飞机模型仿真和飞行控制设计实验界面,并与FlightGear直接对接,实时显示三维立体飞行场景,展现飞行控制过程.平台界面实时显示飞行状态变量曲线,与飞行场景对应,增强数学变量与其物理含义之间的相关性,提升学生理论联系实际的直观理解.平台具有很强的开放性,可以由教师演示操作,也可以由学生主导交互,分步骤分难度让学生自主设计飞行控制系统,有效提高学生综合运用飞行控制理论的能力.【期刊名称】《实验室研究与探索》【年(卷),期】2017(036)007【总页数】5页(P113-117)【关键词】飞行控制系统;三维可视化;开放式实验平台【作者】杨姗姗;王彪【作者单位】南京航空航天大学自动化学院,南京210016;南京航空航天大学自动化学院,南京210016【正文语种】中文【中图分类】TP273;V249.1飞行器控制系统作为飞行器的神经中枢,其可靠性、稳定性及精确度是飞行器安全飞行和执行任务成功与否的重要保障[1]。

飞行器飞行试验三维视景仿真系统设计与实现-1. 研究背景与意义- 介绍当前飞行器飞行试验的重要性和存在的挑战- 阐述三维视景仿真系统在飞行试验中的作用和优势2. 系统需求分析- 从用户需求、系统功能和接口设计等方面分析三维视景仿真系统的需求- 提出关键的技术难点和解决方案3. 系统设计与实现- 介绍系统的整体设计思路和架构- 描述系统各模块的设计原理、功能和实现方法,包括飞行器数学模型、场景生成、图形渲染等4. 系统测试与验证- 展示系统的仿真效果- 采用实际数据对系统进行测试和验证,验证系统的可行性和准确性5. 结论与展望- 总结本文的工作和成果- 对未来相关工作进行展望,包括系统优化和功能拓展等。
1.研究背景与意义随着空气运输需求的不断增加,飞行器的研发也日益活跃。
这些飞行器在设计完成后需要进行试飞,以确保其可靠性、安全性和适航性。
但是,传统的试飞方式比较昂贵且危险。
因此,采用仿真技术进行试飞,是目前广泛采用的方式。
仿真技术能够在控制环境下模拟飞行过程,探索和验证不同设计方案对飞行器的影响和特性,减少试飞的需要并降低了试飞带来的安全风险。
与此同时,三维视景仿真系统在飞行试验中发挥着极其重要的作用,它可以为试飞员提供细致而逼真的飞行环境,使他们能在飞机未实际起飞的情况下进行试飞。
此外,三维视景仿真系统还能提高试飞的效率,减少试飞带来的风险,降低试飞成本,有效地促进了飞行器研发的进展。
因此,本文旨在设计和实现一个高效、准确、功能强大的三维视景仿真系统,以满足飞行器研发和试飞的需要。
该系统采用现代计算机技术和图形学原理,能够模拟真实飞行环境,提供真实的视觉效果和操作体验。
同时,该系统还能够支持多种试飞场景和试飞类型,系统的灵活性和通用性大大提高。
总之,采用三维视景仿真系统进行飞行试验是非常有意义的。
它能够有效提高试飞效率和降低试飞成本,同时还能保障试飞员的安全。
随着技术的不断发展,三维视景仿真技术将会在飞行器研发中起到越来越重要的作用,提高飞行器的设计和试飞效率,推动航空技术的发展。

基于三维边界条件的螺旋桨升力面设计方法随着航空航天技术的发展,螺旋桨的应用越来越广泛,对其性能要求也越来越高。
在设计螺旋桨升力面时,考虑三维边界条件是非常重要的,因为它会影响到螺旋桨的升力性能和气动效率。
本文将介绍一种基于三维边界条件的螺旋桨升力面设计方法,以提高螺旋桨的性能。
1.螺旋桨升力面的三维特性螺旋桨升力面是螺旋桨工作时所产生的升力分布的表现,它受到多种因素的影响,如气动特性、叶片剖面设计、旋翼结构等。
在进行螺旋桨升力面设计时,必须考虑到三维边界条件的影响,以确保螺旋桨的升力性能和气动效率达到最佳状态。
2.三维边界条件对螺旋桨升力面的影响三维边界条件是指在飞机的飞行状态下,流体力学参数在螺旋桨叶片表面产生的非定常流动现象。
这种非定常流动会导致螺旋桨叶片表面的气动力和力矩发生变化,从而影响螺旋桨的升力性能和气动效率。
因此,在设计螺旋桨升力面时,必须考虑到这些三维边界条件的影响,以确保螺旋桨在飞行状态下能够保持稳定的升力性能。
在进行螺旋桨升力面设计时,首先需要对螺旋桨的气动特性进行分析,包括叶片的剖面设计、旋翼结构和流场特性等。
然后,在考虑到三维边界条件的前提下,采用计算流体力学(CFD)方法对螺旋桨进行模拟计算,得到螺旋桨在不同飞行状态下的升力性能和气动效率。
最后,根据模拟计算结果对螺旋桨的升力面进行调整和优化,以提高其性能和效率。
综上所述,基于三维边界条件的螺旋桨升力面设计方法是一种有效的设计方法,可以有效提高螺旋桨的升力性能和气动效率。
在未来的研究中,可以进一步探索对螺旋桨升力面设计的影响因素和优化方法,以满足不同飞行状态下的需求,推动螺旋桨技术的发展和应用。

螺旋桨数值模拟方法
螺旋桨数值模拟方法是一种基于计算流体力学理论的数值模拟
方法,用于模拟螺旋桨在流体中的运动和受力情况。
该方法可以帮助研究者了解螺旋桨在不同工况下的性能表现,优化螺旋桨设计,提高螺旋桨的效率和可靠性。
具体来说,螺旋桨数值模拟方法主要包括以下步骤:
1. 建立螺旋桨数学模型:根据螺旋桨的几何形状和物理特性,建立相应的数学模型,包括几何模型、流场模型和运动学模型等。
2. 离散化:将螺旋桨数学模型划分成有限个小元素,形成离散的数学模型。
3. 网格生成:将离散化后的数学模型转化成网格模型,用于计算流场的物理量。
4. 数值求解:使用计算流体力学方法对螺旋桨在流体中的运动和受力情况进行数值模拟求解,得到流场、压力场和速度场等物理量。
5. 结果分析:对模拟结果进行后处理和分析,评估螺旋桨的性能和优化设计。
螺旋桨数值模拟方法的优点在于可以有效地预测螺旋桨在不同
流体中的性能表现,避免了传统试验方法的高成本和时间消耗。
同时,该方法可以帮助优化螺旋桨的设计,提高其效率和可靠性,具有广泛的应用前景。
- 1 -。
飞行器动力系统的动态建模与仿真在现代航空航天领域,飞行器动力系统的性能和可靠性至关重要。
为了更好地设计、优化和预测飞行器动力系统的工作特性,动态建模与仿真是一种不可或缺的工具。
飞行器动力系统是一个复杂的多学科交叉领域,涵盖了热力学、流体力学、燃烧学、机械工程等多个学科的知识。
其主要组成部分包括发动机、燃料供应系统、进气系统、排气系统等。
发动机作为核心部件,又可以分为多种类型,如喷气式发动机、涡轮螺旋桨发动机、火箭发动机等,每种类型都有其独特的工作原理和性能特点。
动态建模是对飞行器动力系统的物理过程和行为进行数学描述的过程。
通过建立精确的数学模型,可以捕捉到系统中各种参数之间的关系,以及它们随时间的变化规律。
例如,对于喷气式发动机,建模需要考虑空气的吸入、压缩、燃烧、膨胀和排出等过程。
在建模过程中,需要运用各种数学方法和理论,如微分方程、偏微分方程、数值分析等。
在建立模型时,首先要对系统进行合理的简化和假设。
这是因为实际的飞行器动力系统非常复杂,如果不进行简化,建模将变得极其困难甚至无法实现。
然而,简化也需要谨慎进行,以确保模型能够准确反映系统的主要特性和关键行为。
例如,在建模燃烧过程时,可以假设燃烧是均匀的、完全的,但同时需要考虑实际中可能存在的燃烧不完全、火焰传播速度等因素的影响。
模型的参数确定是建模过程中的一个关键环节。
这些参数通常包括物理常数、几何尺寸、材料特性等。
获取参数的方法有多种,如实验测量、理论计算、参考已有文献和数据等。
实验测量可以提供最直接和准确的参数值,但往往受到实验条件和设备的限制。
理论计算则基于物理定律和数学公式,可以在一定程度上预测参数值,但计算过程可能较为复杂。
参考已有文献和数据可以节省时间和成本,但需要对数据的可靠性和适用性进行评估。
建立好模型后,接下来就是进行仿真。
仿真就是利用计算机软件对建立的模型进行数值求解,以得到系统在不同工况下的性能参数和输出结果。
仿真软件通常包括专业的航空航天仿真工具,如MATLAB/Simulink、ANSYS Fluent 等。
X型遥控模拟飞机三维飞行仿真系统的研制的开题报告一、课题背景随着无人机技术的发展,模拟飞行仿真已成为一项重要的技术手段。
模拟飞行仿真系统能够模拟真实飞机飞行环境,提供全方位的环境信息,使用户能够通过虚拟环境感受飞行的真实感。
本课题旨在设计一款基于X型遥控模拟飞机的三维飞行仿真系统,能够提供真实的飞行环境、真实的飞行动作和与真实飞机相同的操控方式,以此来提高X型遥控模拟飞机的性能和可靠性。
二、课题研究内容本课题研究的内容主要包括以下几个方面:1. 模拟飞机建模:根据X型遥控模拟飞机的特点,使用计算机图形学技术进行建模,实现真实飞机的外形和技术参数的虚拟表示。
2. 飞行环境仿真:利用虚拟环境技术,构建真实的飞行环境,包括天气、时间、地形、照明等信息,使用户能够感受到真实的飞行环境。
3. 多机通信:利用无线通信技术,设计多台计算机之间的通信交互,实现多人同时参与飞行的功能。
4. 飞行监控:通过实时跟踪和监控,实现对模型飞机的位置、速度、高度等参数的实时检测和监控。
5. 系统优化:通过对系统的优化和改进,实现系统的性能和可靠性的提高,使系统能够更好地适应不同的应用场景。
三、课题研究意义X型遥控模拟飞机三维飞行仿真系统的研制具有重要的研究意义和实践价值,具体体现在以下几个方面:1. 提高X型遥控模拟飞机的性能和可靠性,使其能够更好地应用于不同领域。
2. 推动模拟飞行技术的发展和推广,为航空产业和军事战略提供更加精准和实用的技术支持。
3. 提升模拟机系统在教育、培训、演示等方面的应用效果,为培养人才做出贡献。
四、课题研究方法本课题采用多种研究方法,主要包括探索性研究、实证研究、案例研究、仿真实验等,其中,实证研究和仿真实验是本课题研究的核心方法。
五、课题研究计划本课题的整体研究计划涵盖以下内容:1. 需求分析:对模拟机系统的使用环境、功能需求、技术要求、性能指标进行详细的分析和探讨,明确系统的设计目标和要求。
飞行动力学三维数值模拟方法飞行动力学是研究飞机飞行状态及其受力情况的学科,其主要任务是分析飞机在大气中受到的各种力的作用,以及飞机如何受力而产生相应的运动。
针对这一领域,三维数值模拟方法得到了广泛应用。
本文将介绍飞行动力学三维数值模拟方法及其应用。
飞行动力学的数值模拟旨在通过计算机模拟飞机在各种复杂的气动条件下的飞行状态和受力情况。
这种方法可以大大减少实验成本,提高分析精度,为生产和研发提供便利。
三维数值模拟方法主要包括离散法、控制体积法和有限元法等。
下面将逐一介绍这些方法及其特点。
离散法是一种常用的数值模拟方法,它将流体领域离散化成有限的小单元,通过数值方法求解流体动力学方程。
在飞行动力学中,离散法常用的技术包括有限差分法和有限体积法等。
有限差分法将连续的偏微分方程转化为离散的代数方程组,然后通过迭代的方式求解。
有限体积法则是通过将流体领域划分为离散的控制体积,对体积内的流体性质进行积分,从而得出离散的守恒方程。
离散法具有模拟复杂流体场的能力,但计算量较大,需要高性能计算机的支持。
控制体积法是一种以控制体积为基础的数值模拟方法,常用于流体动力学的计算。
在三维数值模拟中,控制体积法将流体领域划分为离散的控制体积,并通过对控制体积边界的通量积分,对流体动力学方程进行求解。
控制体积法不仅适用于不可压缩流体,而且对于可压缩流体也有很好的适应性。
该方法具有高精度、高效率和易于并行计算等优点,广泛应用于飞行器的气动分析和流固耦合问题。
有限元方法是一种常用的数值模拟方法,它通过将物体划分为有限的小单元,建立物体内部的变量分布方程,并在每个单元上进行数值插值,从而得到整个物体的数值解。
在飞行动力学中,有限元方法适用于解决结构分析和振动问题。
该方法在航空工程领域的应用非常广泛,可以用于优化设计、疲劳分析、气弹性分析等方面。
除了上述基本的数值模拟方法外,还有其他一些衍生的方法可供选择,如面元法、边界元法、质点法等。
基于X3DΠVRM L的飞机螺旋桨机构运动仿真王金柱Ξ(华北电力大学计算机科学与技术学院,北京 102206)摘 要:本文详细阐述了利用X3DΠVRM L技术实现飞机螺旋桨机构运动仿真的原理和过程,并解释了实现过程中的关键技术。
用户可在装有VRM L插件的Web浏览器中观察其仿真效果,并可通过鼠标进行交互操作。
关键词:Web3D;X3DΠVRM L;虚拟现实;建模;仿真 近几年,X3DΠVRM L技术在大型设备构件三维仿真中得到了良好的应用。
X3DΠVRM L技术是一种可交互操作、可扩展、跨平台的网络3D标准,是X M L标准与3D标准的有机结合。
X3DΠVRM L技术相对于传统的建模仿真技术来讲,具有如下的优点:文件小巧,便于网络传输;能够在Web浏览器上实时浏览,并具有强大的交互功能;搭建开发平台所需软硬件价格低廉,易于推广。
所以,X3DΠVRM L技术为虚拟现实(VR)技术和仿真(S imulation)技术提供了一种很好的解决方案。
本文以飞机螺旋桨机构运动为原型,详细阐述了X3DΠVRM L技术在Web环境下实现仿真的原理与过程,并解释了实现过程中的关键技术。
1.X3DΠVRM L标准介绍(1)VRM L语言介绍[1,2]VRM L(Virtual Reality M odeling Language,即虚拟现实建模语言)是原来的网络3D图形的IS O标准,是用于描述虚拟环境场景的一种标准建模语言。
VRM L发展历史并不很长, VRM L协会(VRM L C ons ortium)于1995年推出其1.0版规范,于次年又推出了改进的2.0版规范。
2.0版有如下改进:对静态场景描述有所增强;增加了交互性;增加了动画和行为的描述;增加了构造原型的功能。
1997年l2月,VRM L协会将VRM L作为国际标准正式发布,并于1998年1月获IS O批准,称为VRM L97。
同时,VRM L协会在1997年将它的名字改为Wed3D协会(Web3D C ons ortium),并制定了VRM L97新的国际标准。
VRM L文件(.wrl)本身是一种把三维图形和多媒体结合起来的文件格式,它能够把图形对象和声音对象通过各种机制灵活地展示出来,并能够在互联网上进行三维场景传输、实时漫游、网络共享。
实际上,VRM L文件本身只定义了客户端应如何渲染的指令而不是渲染后的场景,而渲染场景的工作由第三方提供的VRM L浏览器插件来完成。
(2)X3D介绍[3]X3D是VR M L的继承,2001年8月Wed3D协会发布新一代国际标准———X3D(X3D的含义是可扩展的3D)。
X3D是在重要软件厂商(如3Dlabs、A TI T echn ologies、ParallelG raphics、S ony E lectronics等)的支持下提出的。
X3D的主要任务是把VR M L 的功能封装到一个轻型的,可扩展的核心之中。
因为X3D是可扩展的,所以任何开发者可以根据自己的需求,扩展其功能。
在SIGG RAPH2002会议上Wed3D C ons ortium发布了X3D 最终工作草案,Wed3D C ons ortium准备将该规范递交给国际标准化组织IS O,同时Wed3D C ons ortium希望Wed3D软件公司使用X3D规范来开发相应产品并评估规范的可行性。
2.X3D的技术特点(1)3D图形:多边形化几何体、参数化几何体、变换层级、光照、材质、多通道纹理帖图;(2)2D图形:在3D变换层级中显示文本、2D矢量、平面图形;(3)动画:计时器和插值器驱动的连续动画;人性化动画和变形;(4)空间化的音频和视频:在场景几何体上映射视听源;(5)用户交互:基于鼠标的选取和拖曳;键盘输入;(6)导航:摄像机;用户在3D场景中的移动;碰撞、接近和可见性检测;(7)用户定义对象:通过创建用户定义的数据类型,可以扩展浏览器的功能;(8)脚本:通过程序或脚本语言,可以动态的改变场景;(9)网络:可以用网络上的资源组成一个单一的X3D场景;可以通过超链接对象连接到其他场景或网络上的其他资源;(10)物理模拟:人性化动画;地理化数据集;分布交互模拟(Distributed Interactive S imulation———DIS)协议整合。
X3D标准的发布,为互联网3D图形的发展提供了广阔的前景。
无论是小型的具有3D功能的Web客户端应用,还是高性能的广播级应用,X3D都应该是大家共同遵守的标准,在统一的X3D基本框架下保证不同软件厂家开发的软件具有互操作性。
Ξ作者简介:王金柱(1977-),男,北京人,华北电力大学计算机科学与技术学院计算机应用技术专业05级硕士研究生。
中国电力教育2006年研究综述与技术论坛专刊3.基于X 3D ΠVRM L 的飞机螺旋桨运动仿真的实现(1)系统实现步骤及设计目标本系统实现虚拟环境下的机构运动仿真主要分以下三个步骤:首先建立运动机构的静态模型,即“.x3d ”文件;其次根据螺旋桨机构的运动特征并配合运用X 3D 强大的动画及交互功能在“.x3d ”文件中模拟动画仿真;最后将“.x3d ”源文件编译成“.wrl ”文件格式实现在Web 浏览器中浏览。
实现飞机螺旋桨机构运动的仿真的设计过程中要尽量提高模型的真实性,运动模拟的精确性和交互操作的实时性。
最终能够在Web 浏览器上观察到逼真、准确、实时的效果。
(2)静态模型的建立方法[4]以前建立VRM L 实体模型大致有两种方法:一种是利用VRM LPad 工具直接生成VRM L 格式模型;另一种是利用专业的三维建模工具(如:UG 、Pro ΠE 、S olidW orks 等)先建立模型,然后再通过第三方插件输出为VRM L 格式模型。
现在,随着X 3D -Edit 编辑工具的出现,我们有了更方便、快捷的方法。
X 3D -Edit 是图形化Extensible 3D (X 3D )文件编辑器,它是通过X 3D 3.0DT D 定义的X 3D 3.0tagset 标签集来定制Ja 2va 平台下的通用X M L 编辑器。
在编辑X 3D 场景文件时,X 3D -Edit 可以提供简化的无错的创作和编辑方式。
本系统需要用X 3D -Edit 编辑器建立一个名称为air 2plane.x3d 的模型文件。
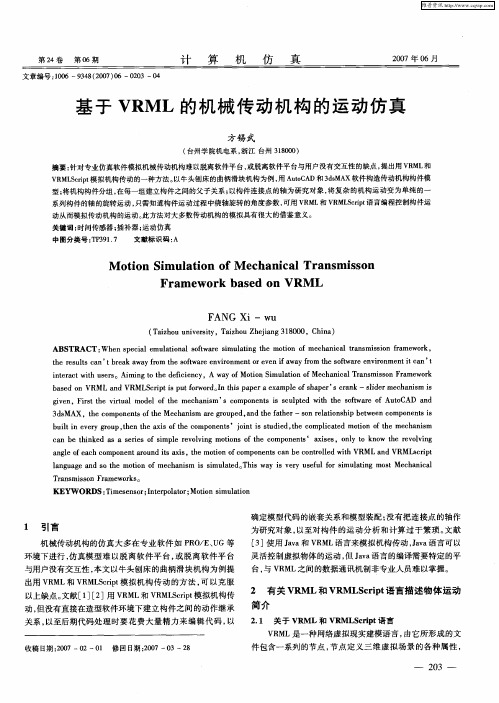
X 3D 标准中的所有基本几何形体都是通过一个叫Shape 的元件来实现的。
Shape 元件在X 3D -Edit 编辑器中表示为一个节点,它一般包含以下两个子节点:一个是Appearance 子节点,它通过Material 节点来描述这个形体的外观(包括材质、颜色、贴图等元素);另一个子节点用于描述这个形体的基本几何形状(如:Box ,Cylinder ,S phere 等)。
X 3D 场景层次关系如图1所示:图1 X 3D 场景的层次关系图图2所展示的就是X 3D -Edit 编辑器中Shape 元件的基本语法,图中节点描述的就是飞机模型(airplane.x3d )机身的主体部分。
事实上,利用Shape 元件的复杂组合,我们可以搭建出任何实体模型。
这样,X 3D -Edit 编辑器就可以完成其它专业建模软件(如:UG 、Pro ΠE 、S olidW orks 等)同样能完成的工作。
图2 Shape 元件的基本语法 (3)X 3D 动画的实现原理[3]在X 3D 中,动画的仿真涉及到时间触发器、插值器、事件和路由。
①时间触发器T imeSens or触发器或者叫做传感器,是用来产生不同类型的事件。
时间触发器T imeSens or 根据时间来不断产生事件,时间触发器T imeSens or 的主要域有:A.cycleInterval :每个周期的长度,以秒为单位,取值大于0;B.enabled :为T rue ,当条件成立时产生时间相关事件;为False ,任何条件下都不会产生时间相关事件;C.loop :表明时间传感器是无限循环,还是在一个周期后被终止;D.startT ime :开始产生事件的时间;E.stopT ime :终止产生事件的时间。
其值若小于等于起始时间,则被忽略;F.pauseT ime :暂停时间。
若现在时间≥pauseT ime ,is 2Paused 值变为T rue ,暂停;G.resumeT ime :恢复时间。
当resumeT ime ≤现在时间,is 2Paused 值变为False ,再次激活;H.isActive :表明时间传感器当前是否在运行。
若在运行,则返回T rue ;若处于停止状态,则返回False 。
isPaused —表明时间传感器当前是否在暂停;I.cycleT ime :在每个周期开始时,返回当前时间;J.fraction-changed :当前周期的完成比。
从0(周期开始)到1(周期结束);K.time :从格林威治时间1970年1月1日子时(午夜12点)至今所经过的秒数。
②插值器X 3D 中的插值器就起到设定关键帧并自动生成中间帧的作用。
它主要有颜色插值器节点(C olorInterpolator )、坐标插值器节点(C oordinateInterpolator )、位置插值器节点(P ositionInter 2polator )和比例插值器节点(ScalarInterpolator )。
除此之处,X 3D还提供比较专业的插值器,如NUR BS 曲线系列插值器等。
③事件事件(Events )是在X 3D 运行环境中产生行为的主要方法,这种方法用来改变输入域的输入值或接受域的输出值,分别又称为发送到输入域的事件和输出域发送的事件。
④路由路由(R oute )声明允许我们把一个节点的输出事件连接到另一个节点的输入事件上,这样可以执行复杂的行为,而不需要使用程序命令。
在路由中,一个输出事件发生,相应的输入事件就会接受到通知,同时可以对输入事件的变动做出相应的处理。
这个处理可以改变节点的状态,产生额外的事件,或者改变场景图的结构。
R oute (路由)不是节点,它是一个语句。
ROUTE 语句是建立指定节点的域之间通道的语法构件。
ROUTE 语句可以出现在X 3D 文件的最上层,或者也可以出现在节点中任何可291基于X3D ΠVRM L 的飞机螺旋桨机构运动仿真以使用域的地方。
ROUTE 语句应该放置在路由的源节点和目的节点之后,而不能放置在源节点中或目的节点中。
图3所展示的就是X 3D -Edit 编辑器中时间触发器、插值器、路由的基本语法,图中节点描述的就是飞机螺旋桨构件模型(airplane.x3d )基本动画的生成部分。
图3 时间触发器、插值器、路由的基本语法(4)系统实现的关键技术实现本系统的关键技术在于模拟动画的生成,图3展示了动画生成的节点代码,下面对图3所示的代码原理进行阐述。