纯电动汽车电机转速主动 阻尼控制策略软件开发及实车标定
- 格式:doc
- 大小:23.50 KB
- 文档页数:6
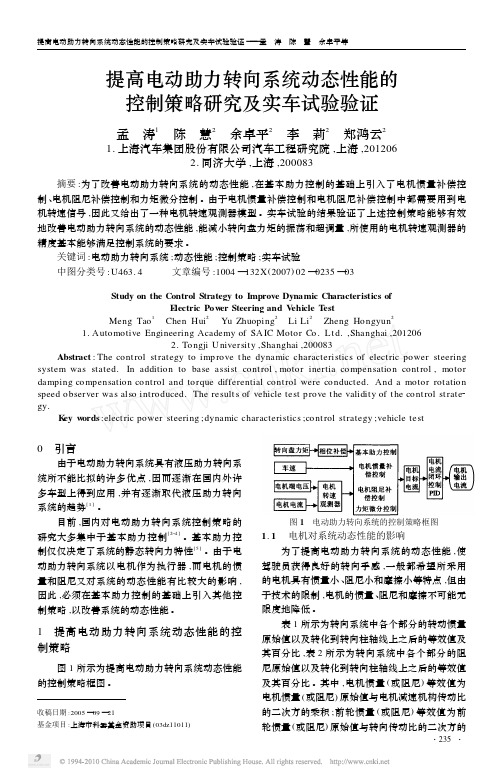
提高电动助力转向系统动态性能的控制策略研究及实车试验验证孟 涛1陈 慧2余卓平2李 莉2郑鸿云21.上海汽车集团股份有限公司汽车工程研究院,上海,2012062.同济大学,上海,200083摘要:为了改善电动助力转向系统的动态性能,在基本助力控制的基础上引入了电机惯量补偿控制、电机阻尼补偿控制和力矩微分控制。
由于电机惯量补偿控制和电机阻尼补偿控制中都需要用到电机转速信号,因此又给出了一种电机转速观测器模型。
实车试验的结果验证了上述控制策略能够有效地改善电动助力转向系统的动态性能,能减小转向盘力矩的振荡和超调量,所使用的电机转速观测器的精度基本能够满足控制系统的要求。
关键词:电动助力转向系统;动态性能;控制策略;实车试验中图分类号:U463.4 文章编号:1004—132X (2007)02—0235—03Study on the Control Strategy to Improve Dynamic Characteristics ofElectric Pow er Steering and V ehicle T est Meng Tao 1Chen Hui 2Yu Zhuoping 2Li Li 2Zheng Hongyun 21.Automotive Engineering Academy of SA IC Motor Co.Lt d.,Shanghai ,2012062.Tongji U niversity ,Shanghai ,200083Abstract :The cont rol st rategy to imp rove t he dynamic characteristics of electric power steering system was stated.In addition to base assist control ,motor inertia compensation cont rol ,motor damping compensation co nt rol and torque differential control were conducted.And a motor rotation speed o bserver was also introduced.The result s of vehicle test p rove t he validity of t he cont rol strate 2gy.K ey w ords :electric power steering ;dynamic characteristics ;cont rol strategy ;vehicle test收稿日期:2005—09—21基金项目:上海市科委基金资助项目(03dz11011)0 引言由于电动助力转向系统具有液压助力转向系统所不能比拟的许多优点,因而逐渐在国内外许多车型上得到应用,并有逐渐取代液压助力转向系统的趋势[1]。

电动汽车EPS系统阻尼工况Bang-Bang-PID控制赵景波;周冰;贝绍轶【期刊名称】《电机与控制学报》【年(卷),期】2011(015)011【摘要】电动助力转向(EPS)系统是电动汽车设计装配过程中的关键部件之一,EPS 的阻尼控制可提高汽车高速行驶时横摆角速度的收敛,改善转向稳定性.建立EPS系统动力学模型和汽车三自由度转向模型,分析电动机转速与输出转矩之间的制动转矩关系,设计阻尼系数随车速的变化规律.设计Bang - Bang - PID控制算法,进行了仿真分析.以某微型轿车为试验对象,设计了汽车EPS系统实车试验平台,在80km/h直线行驶状态下进行阻尼控制试验.结果表明:与无控制相比,原车控制的最大把持力矩降低49.45%,Bang - Bang -PID控制的最大把持力矩降低57.14%;与原车控制相比,Bang - Bang - PID控制的最大把持力矩降低7.69%.系统具有更短的收敛速度和更强的抗干扰能力,提高了汽车的行驶稳定性.【总页数】6页(P95-100)【作者】赵景波;周冰;贝绍轶【作者单位】江苏技术师范学院机械与汽车工程学院,江苏常州213001;江苏技术师范学院计算机工程学院,江苏常州213001;江苏技术师范学院机械与汽车工程学院,江苏常州213001【正文语种】中文【中图分类】TP29;U463.4【相关文献】1.电动汽车复合制动系统过渡工况协调控制策略 [J], 朱智婷;余卓平;熊璐2.电动汽车EPS助力工况柔性PID控制及试验 [J], 赵景波;贝绍轶;陈龙3.侧风干扰工况电动汽车EPS反向助力控制及试验 [J], 赵景波;周冰;贝绍轶4.基于多工况综合留数及H2/H∞的多回直流系统阻尼控制鲁棒设计方法 [J], 翁华;徐政;刘昇;赵兵;董桓锋;许烽5.模拟工况下电动汽车驱动系统控制方法研究 [J], 王鹏博;卢秀和;初明因版权原因,仅展示原文概要,查看原文内容请购买。

汽车研发:整车控制器(VCU )策略及开发流程!摘要:纯电动汽车整车控制系统以VCU为中心,电池、电机及充电系统为外围辅助系的一套完整的电控系统。
随着汽车纯电动汽车的发展,将来对VCU的要求会越来越高。
电动汽车资源网讯:整车控制器是电动汽车各个子系统的调控中心,协调管理整车的运行状态, 也是电动汽车的核心技术之一。
就像真正的美女是需要智慧与美貌并存,光有身材,哪怕前凸后翘,S型,xiong器逼人,也只能从肉体上感觉很诱人,可远观却无法多沟通,这就是大家常说的胸大无脑,而VCU就是汽车的大脑,能够让汽车变得智能化,更懂你,可远观也可亵玩焉!今天,漫谈君就和大家聊一聊,整车控制器(VCU )开发的方法和流程。
、VCU的作用与功能在电动汽车中,VCU是核心控制部件,它根据加速踏板位置、档位、制动踏板力等驾驶员的操作意图和蓄电池的荷电状态计算出运行所需要的电机输出转矩等参数,从而协调各个动力部件的运动,保障电动汽车的正常行驶。
此外, 可通过行车充电和制动能量的回收等实现较高的能量效率。
在完成能量和动力控制部分控制的同时,VCU还可以与智能化的车身系统一起控制车上的用电设备,以保证驾驶的及时性和安全性。
因此,VCU的设计直接影响着汽车的动力性、经济性、可靠性和其他性能。
1、VCU主要功能.接收驾®S指令,輸岀电机I区前扭矩, 实现躯动系统控制★整车能■分配及优化S理*监测和协调管理车上其他用电器★故障处理及诊断功能★系统状态仪裘显示亠*整车设备營理1)整车能量分配及优化管理;根据驾驶员的具体操作和实际工况对车辆进行管理、优化及调整,以实现优化能量供给,延长车辆使用寿命,提高车辆运行经济性。
2 )故障处理及诊断功能;对出现的异常情况进行诊断、提示和主动修复工作。
3)系统状态仪表显示;4)整车设备管理监控各设备运行状态,及时进行动态调整。
5)系统控制根据既定的操控程序对驾驶员的各项操作进行及时响应,实时与数据库进行比对,对各节点进行动态控制。

纯电动汽车整车控制器VCU技术要求目录1. 概述 (5)2. 术语 (5)3.1定义 (5)3.2缩略语 (5)3. 开发流程 (5)4.1VCU控制策略开发流程 (5)4.2VCU控制策略开发需求输入 (6)4.3VCU控制策略开发交付物 (6)4. VCU软件功能需求 (6)5.上下电功能需求 (7)6.1功能概述 (7)6.2功能实现描述 (7)6.2.1上电功能逻辑图 (7)6.2.2上电功能需求 (8)6.2.3下电功能逻辑图 (9)6.2.4下电功能需求 (10)6.挡位管理功能需求 (10)7.1功能概述 (10)7.2功能实现描述 (10)7.2.1功能逻辑图 (10)7.2.2功能需求 (11)7.驾驶员需求扭矩计算功能需求 (11)8.1功能概述 (11)8.2功能实现描述 (11)8.2.1功能逻辑图 (11)8.2.2功能需求 (12)8.蠕行功能需求 (14)9.1功能概述 (14)9.2功能实现描述 (14)9.2.1功能逻辑图 (14)9.2.2功能需求 (14)9.驱动扭矩控制功能需求 (15)10.1功能概述 (15)10.2功能实现描述 (15)10.2.1功能逻辑图 (15)10.2.2功能需求 (15)10.高压能量管理功能需求 (16)11.1功能概述 (16)11.2功能实现描述 (16)11.2.1功能逻辑图 (16)11.2.2功能需求 (16)11.充电管理功能需求 (17)12.1功能概述 (17)12.2功能实现描述 (17)12.2.1充电上电功能逻辑图 (17)12.2.2充电上电功能需求 (18)12.2.3充电下电功能逻辑图 (18)12.2.4充电下电功能需求 (19)12.滑行能量回收功能需求 (19)13.1功能概述 (19)13.2功能实现描述 (19)13.2.1功能逻辑图 (19)13.2.2功能需求 (20)13.制动能量回收功能需求 (21)14.1功能概述 (21)14.2功能实现描述 (21)14.2.1功能逻辑图 (21)14.2.2功能需求 (21)14.最高车速计算功能需求 (22)15.1功能概述 (22)15.2功能实现描述 (22)15.2.1功能逻辑图 (22)15.2.2功能需求 (22)15.辅助控制功能需求 (23)16.1功能概述 (23)16.2功能实现描述 (23)16.2.1功能逻辑图 (23)16.2.2功能需求 (23)16.故障诊断功能需求 (24)16.1功能概述 (24)16.2功能实现描述 (24)16.2.1功能逻辑图 (24)16.2.2功能需求 (24)1.概述该技术要求书定义了整车控制策略的技术要求,仅作为纯电动汽车策略开发技术交流的依据,同时指导自主开发整车控制策略方案制定及实施。
一种纯电动车自适应主动阻尼控制方法与流程(最新版3篇)目录(篇1)1.引言2.纯电动车自适应主动阻尼控制方法的提出3.控制方法的具体流程4.控制方法的优势与应用前景5.结论正文(篇1)【引言】随着纯电动车的普及,其驾驶舒适性和行驶稳定性越来越受到重视。
自适应主动阻尼控制作为提高纯电动车行驶性能的有效手段,具有重要的研究意义。
本文将介绍一种纯电动车自适应主动阻尼控制方法及其流程。
【纯电动车自适应主动阻尼控制方法的提出】纯电动车自适应主动阻尼控制方法是基于车辆动力学模型和路面不平度信息,通过调节阻尼器阻尼系数,实现对纯电动车悬挂系统的主动控制。
该方法旨在提高纯电动车在复杂路面上的行驶舒适性和稳定性。
【控制方法的具体流程】1.采集路面不平度信息:通过安装在车辆底部的传感器,实时采集路面不平度信息。
2.建立车辆动力学模型:根据纯电动车的结构特点,建立相应的车辆动力学模型,包括悬挂系统、轮胎和车身等部分。
3.计算阻尼系数:根据路面不平度信息和车辆动力学模型,利用模糊控制算法或神经网络控制算法等,实时计算出最优阻尼系数。
4.调节阻尼器阻尼系数:将计算出的最优阻尼系数作用于阻尼器,实现对悬挂系统的主动控制。
【控制方法的优势与应用前景】纯电动车自适应主动阻尼控制方法具有以下优势:1.提高行驶舒适性:通过对悬挂系统的主动控制,有效降低车辆在行驶过程中产生的振动,提高驾驶舒适性。
2.提高行驶稳定性:根据路面不平度信息实时调节阻尼系数,有助于提高纯电动车在复杂路面上的行驶稳定性。
3.降低能耗:通过对悬挂系统的主动控制,降低车辆在行驶过程中的能耗。
纯电动车自适应主动阻尼控制方法在纯电动车辆工程领域具有广泛的应用前景,有望为纯电动车的普及和发展提供有力支持。
【结论】本文介绍了一种纯电动车自适应主动阻尼控制方法及其流程,该方法具有提高行驶舒适性、提高行驶稳定性和降低能耗等优势,具有广泛的应用前景。
目录(篇2)1.引言2.纯电动车自适应主动阻尼控制方法的提出3.控制方法和流程的详细步骤4.控制方法的优点和应用前景5.结论正文(篇2)【引言】随着电动汽车的普及,纯电动车的驾驶舒适性和行驶稳定性越来越受到人们的关注。
一种纯电动车自适应主动阻尼控制方法与流程【实用版】目录1.引言2.纯电动车自适应主动阻尼控制方法的提出3.控制方法和流程的详细步骤4.实验验证及结果分析5.结论正文【引言】随着电动车的普及和应用,电动车的性能优化和舒适性提升成为了研究的热点问题。
其中,纯电动车的自适应主动阻尼控制方法对于提升电动车的行驶稳定性和乘坐舒适性具有重要意义。
本文提出了一种纯电动车自适应主动阻尼控制方法与流程,并通过实验验证了其有效性。
【纯电动车自适应主动阻尼控制方法的提出】纯电动车自适应主动阻尼控制方法是指根据电动车的实时行驶状态,自动调整减震器的阻尼系数,以达到最佳的行驶性能和舒适性。
该方法主要由传感器、控制器和执行器三部分组成。
传感器用于实时监测电动车的行驶状态,如加速度、速度等;控制器根据传感器的反馈信息,计算出最优阻尼系数,并将其发送给执行器;执行器则根据控制器的指令,调整减震器的阻尼系数。
【控制方法和流程的详细步骤】纯电动车自适应主动阻尼控制方法和流程的具体步骤如下:1.传感器实时监测电动车的行驶状态,如加速度、速度等;2.控制器根据传感器的反馈信息,计算出最优阻尼系数;3.控制器将最优阻尼系数发送给执行器;4.执行器根据控制器的指令,调整减震器的阻尼系数;5.控制器持续监测电动车的行驶状态,并根据实际情况进行下一次调整。
【实验验证及结果分析】为验证所提出的纯电动车自适应主动阻尼控制方法的有效性,我们进行了实验研究。
实验结果表明,该方法能够显著提高电动车的行驶稳定性和乘坐舒适性。
具体来说,与传统的固定阻尼系数的减震器相比,采用纯电动车自适应主动阻尼控制方法的减震器在行驶过程中的振动幅度和振动频率均得到了有效控制,从而提高了行驶的平稳性和乘坐的舒适性。
【结论】本文提出了一种纯电动车自适应主动阻尼控制方法与流程,并通过实验验证了其有效性。
该方法能够根据电动车的实时行驶状态,自动调整减震器的阻尼系数,从而达到最佳的行驶性能和舒适性。
新能源汽车驱动电机的控制策略与算法比较随着全球能源环境问题的日益严峻,新能源汽车作为解决传统燃油车排放问题的重要途径,受到了广泛的关注和推广。
而新能源汽车的核心部件之一——驱动电机,其控制策略和算法在提升整车性能、实现高效能源利用方面起着至关重要的作用。
本文将就新能源汽车驱动电机的控制策略和算法进行比较,以期为相关研究和工程实践提供参考。
一、速度闭环控制策略与算法比较1.1 传统PID控制策略传统的PID控制策略在新能源汽车驱动电机控制方面应用较为广泛。
它采用比例、积分和微分三个参数的调节来实现速度的闭环控制。
该算法简单易懂,调试方便,但对于瞬时响应和系统稳定性的要求较高,存在参数整定困难和鲁棒性不足的问题。
1.2 模糊控制策略模糊控制策略利用模糊逻辑进行驱动电机的速度控制,可以在一定程度上克服PID控制算法的不足。
它能够根据输入和输出的模糊关系来进行驱动电机的控制,但由于模糊集合和规则的确定存在一定的主观性,所以需要经验丰富的工程师进行控制参数的选择和调整。
1.3 最优控制策略最优控制策略是利用最优控制理论,根据驱动电机的数学模型建立相应的优化目标函数,并通过求解优化问题来获得最优控制参数。
这种策略能够最大限度地提高驱动电机的能源利用效率和整车性能,但其计算复杂度较高,实时性较差,对硬件的要求也较高。
二、扭矩控制策略与算法比较2.1 直接扭矩控制策略直接扭矩控制策略通过直接调节控制器的输出来实现对驱动电机扭矩的控制。
它具有响应速度快、动态特性好的优点,但在低速区存在扭矩波动较大的问题。
2.2 基于变流器控制策略基于变流器的控制策略是通过改变变流器输出的电流和电压来实现对驱动电机扭矩的控制。
该策略能够较好地解决直接扭矩控制策略存在的问题,但需要对变流器进行精确的参数调整和控制。
2.3 感应电机矢量控制策略感应电机矢量控制策略通过对电机的电流和电压进行矢量分解和控制,实现对感应电机的精确控制。
该策略具有响应速度快、控制精度高、运行平稳等优点,但对硬件的要求较高,成本也较高。
新能源汽车电机控制策略的实时性能评估新能源汽车的快速发展和普及,使得电机控制策略的性能评估成为了一个重要的课题。
本文将探讨新能源汽车电机控制策略的实时性能评估方法以及其在汽车行业中的应用。
1. 引言新能源汽车的兴起为减少传统燃油车辆的排放带来了希望。
而电机控制作为新能源汽车的核心技术,其性能评估对于确保汽车的安全性、可靠性和高效性至关重要。
2. 实时性能评估的重要性在实际驾驶情况下,准确评估电机控制策略的实时性能对于驾驶员的行车体验和车辆的稳定性具有重要意义。
因此,开发能够实时评估电机控制策略性能的方法是非常必要的。
3. 实时性能评估方法3.1 数据采集与处理首先,需要采集与电机控制相关的大量数据,包括传感器数据、电池数据、电动机数据等等。
然后,对这些数据进行处理和分析,提取有用的信息以评估电机控制策略的性能。
3.2 模型建立与仿真通过建立电机控制策略的数学模型,可以进行仿真实验来评估其性能。
在仿真过程中,可以模拟不同的工况、路况以及交通情况,得到不同情况下电机控制策略的性能表现。
3.3 硬件实时评估在实际车辆上进行硬件实时评估是最准确的方法。
这需要通过在汽车上添加控制设备和传感器,来实时采集和分析电机控制策略的性能。
这种方法能够直接反映电机控制策略在实际驾驶情况下的表现。
4. 实时性能评估的应用4.1 算法优化通过实时性能评估,可以及时发现电机控制策略中存在的问题和不足,并进行相应的算法调整和优化,以提高电机控制策略的性能。
4.2 安全保障实时性能评估可以帮助监测电机工作状态和电机控制策略的健康状况,发现潜在问题,并采取相应措施来保障车辆的安全性。
4.3 能耗优化通过实时性能评估,可以针对不同工况和路况进行电机控制参数的调整,以降低能耗并提高能源利用率。
5. 总结本文探讨了新能源汽车电机控制策略实时性能评估的重要性以及相应的方法和应用。
实时性能评估能够帮助优化算法、提高安全性和降低能耗,进一步推动新能源汽车的发展。
纯电动汽车电机转速主动阻尼控制策略软件开发及实车标定作者:沙伟郭亚子来源:《时代汽车》2019年第04期摘要:纯电动汽车电机转速主动阻尼控制策略软件开发及实车标定,以整车驾乘平顺无抖动为目标,研究一种电机转速主动阻尼控制策略的软件开发并开展相应的实车标定。
通过对当前电机转速进行滤波处理建立电机目标输出转速,建立电机输出扭矩的PID调节环节对电机输出扭矩进行调节,闭环目标转速。
实车标定结果显示,电机转速滤波策略及电机扭矩PID调节策略组成的电机转速主动阻尼控制策略能够实现对整车传动系统中电机的输出转速波动进行补偿,消除整车抖动提升纯电动汽车驾驶性,且在实车标定方面存在较大的可优化空间。
关键词:纯电动汽车;驾驶性;主动阻尼控制;滤波算法;PID控制算法1 引言近代以来,以石油资源为主要能源的汽车行业发展为各国经济的支柱性产业之一。
随着近些年人类社会对节能减排的深入认识、产业技术的发展和相关政策的引导,以可再生资源为能源的新能源汽车展现了强劲的发展势头,其中又以纯电动汽车的发展最为迅速、成熟[1]。
相比于传统内燃机车,纯电动汽车通过驱动电机对整车进行驱动,因此整车电力驱动及控制系统是其产业技术的核心,也是纯电动汽车区别于传统汽车的最大不同点之一。
随着当前纯电动汽车的逐渐普及其产业化技术的进一步成熟,消费者对纯电动汽车产品的要求也越来越高。
由于纯电动汽车采用电机作为驱动机构,因此相比传统内燃机车在动力性方面有其得天独厚的优势;而随着动力电池技术的发展,纯电动汽车的续驶里程焦虑也得到极大缓解,经济性提升明显;而针对用户感受最直接和最明显的驾驶平顺性上,仍然有较大的提升空间,尤其是针对目前占据纯电动汽车市场较大份额的经济型纯电动汽车产品。
针对纯电动汽车驾驶性开发,基于纯电动汽车传动系刚性连接、无阻尼的特殊特性及传动系间隙存在的必然性,诸如博世anti-jerk等优秀的控制策略已经得到较为广泛的应用。
其中,PID作为控制领域最为成熟和广泛应用的一种控制算法,本身在电机的转速控制上已得到成熟的应用。
但是由于整车传动系各动力总成部件之间的动力传动扭矩耦合关系的存在,电机内部的PID控制策略往往不足以完全闭环整车层面的抖动表现。
本文基于一阶RC滤波算法和PID 算法,建立一种通过调节电机输出扭矩来对电机输出转速进行闭环的电机转速主动阻尼控制策略,并完成相关软件开发和参数标定。
2 电机目标转速滤波策略开发及标定在电机控制领域,针对电机输出转速的控制已有大量的相关研究积累。
考虑到电机驱动负载以及整车传动系的动力耦合、机械间隙的必然存在等因素,针对纯电动汽车整车层面驾驶性开发而开展的电机输出转速控制,与对单一电机部件进行输出转速控制的台架标定不尽相同。
2.1 电机目标转速滤波策略开发由于整车传动系各个动力传动部件间复杂的动力耦合关系,传动部件各自难易量化的机械特性以及无法预估的机械传动间隙的存在,提高了通过建立整车传动系准确模型来建立电机目标输出转速的难度和工作量。
同时,当电机转速开始出现非期望的转速波动时,通过调节电机输出扭矩抑制电机转速的后续波动,即可达到大大降低电机转速波动在整车层面影响的目标,提升驾驶性。
因此,本文首先通过一阶RC滤波算法对当前电机转速进行滤波,得到电机转速主动阻尼控制策略需要闭环的电机目标转速。
当电机实际转速保持在期望内变化时,电机转速滤波的结果需要快速响应电机实际转速的变化;而当电机实际转速出现非期望的转速波动时,电机转速滤波结果需要对电机实际转速的非期望波动进行平滑处理,降低转速抖动。
一阶RC滤波算法如式(2.1)所示:TMSpeedFilterNow=(1-Prop[x])*TMSpeedFilterLast+Prop[x]*TMSpeed(2.1)其中,TMSpeedFilterNow表示当前电机转速滤波结果,TMSpeedFilterLast为上一周期电机转速滤波结果,TMSpeed为电机实际转速,Prop[x]为电机实际转速在一阶RC滤波算法所占的权重。
为了达到对电机转速滤波结果的期望,Prop[x]需要根据电机实际的转速区间和波动情况进行分段和实际标定。
2.2 电机目标转速滤波模型仿真根据电机一阶RC滤波算法,在MATLAB/Simulink中搭建电机转速滤波仿真模型,对其进行仿真研究,验证所建立滤波算法的可行性,并对Prop[x]进行初步的标定。
一阶RC滤波算法MATLAB/Simulink仿真模型如图2.1所示:根据对纯电动汽车驾驶性开发过程的认识,当电机实际转速波动超过30rpm/30ms时,即会引起整车产生抖动问题。
若该波动持续多次,则整车抖动问题明显。
因此,在电机转速一阶RC滤波模型中设置相应的电机转速信号,调整一阶RC滤波算法的权重系数,观察滤波后的结果,如图2.2所示:由图示结果可知,当前一阶RC滤波算法基本满足建立电机转速主动阻尼控制所需的电机目标转速的要求。
2.3 电机目标转速实车标定由于纯电动车汽车驱动电机是在整车的传动系中工作的,因此为了得到具体而有效的一阶RC滤波算法的系数,还需要在实车上进行具体标定。
实车标定过程中,为了达到标定结果真实有效及覆盖性广的目的,重点针对汽车行驶的常见工况进行标定和测试。
电机转速一阶RC滤波算法在不同行驶工况下的实车标定结果如图2.3所示:由图2.3可知,电机转速一阶RC滤波算法在电机未出现非期望的波动时,能够较为真实的反应电机的实际转速,最大误差不超过150rpm;在电机转速出现较为严重的转速波动时,可以较好的对其进行滤波处理,得到相对平滑变化的电机目标转速。
因此,该电机转速一阶RC 滤波算法在不同行驶工况下均符合建立电机转速主动阻尼控制的目标转速的要求。
3 电机输出扭矩PID控制策略开发及标定PID作为一种成熟的控制算法,在各种工业领域早已得到成熟应用,包括电机内部对其输出转速的控制。
经典PID控制算法分为比例、积分、微分三个部分,比例控制的输出量与输入偏差成正比关系,可以减小但不能完全消除偏差;积分控制的输出变化量与输入偏差的积分成正比关系,用于消除偏差;微分部分输出量与偏差微分成正比,具有超前调节的作用。
3.1 电机输出扭矩PID控制策略开发本文基于经典PID算法,将电机当前转速和目标转速间的差值作为PID调节模块的输入,电机扭矩调节量作为PID调节模块的输出量,完成电机转速主动阻尼控制策略的电机输出扭矩PID控制模块的开发。
其中,电机输出扭矩PID控制系统的基本算法如式3.1-3.4所示:Pidtorquecorrect=PID_Kp_Part+PID_Ki_Part+PID_Kd_Part(3.1)PID_Kp_Part=Kp*TMSpeedErrorNow(3.2)PID_Ki_Part=Ki*(∑TMSpeed Error-Now)(3.3)PID_Kd_Part=Kd*(TMSpeedError-Now_TMSpeedErrorLast)(3.4)其中,Pidtorquecorrect表示PID调节模块对电机当前输出扭矩的调节部分,PID_Kp_Part、PID_Ki_Part、PID_Kd_Part为PID算法调节模块的比例部分、积分部分和微分部分,Kp、Ki和Kd分别为比例部分、积分部分和微分部分的标定参数。
电机扭矩PID调节模块的输出量作为电机输出扭矩的调节一部分,会在合适的时候介入。
鉴于电机转速波动的一般范围不超过250rpm,因此电机输出扭矩PID调节模块的调节扭矩幅值不需要超过30Nm;电机输出扭矩PID调节模块的调节扭矩幅值经过标定后,需要在需要的时候介入电机当前的输出扭矩对电机转速波动进行闭环。
其中,电机输出扭矩PID调节模块的调节扭矩介入时机如表1所示:3.2 电机输出扭矩PID控制模型仿真根据电机输出扭矩PID控制策略的开发,在MATLAB/Simulink中建立仿真模型,对PID 控制模块进行仿真研究,验证所建立控制模型的可行性,并对Kp、Ki和Kd进行初步的标定。
电机输出扭矩PID控制策略的MATLAB/Simulink仿真模型如图3.1所示:仿真模型中部分所需参数如表2根据表1给出的电机输出扭矩PID调节模块的扭矩介入策略,在仿真模型中设置相应的转速差及电机状态,得到PID控制模块的仿真结果如图3.2所示:根据图示给出仿真模型的仿真结果显示,电机输出扭矩PID调节模块控制策略基本满足建立电机转速主动阻尼控制所需的电机扭矩调节作用。
4 电机转速主动阻尼控制策略开发及标定根据对电机转速滤波策略的开发、仿真研究和实车标定,以及对电机输出扭矩PID调节模块的开发、仿真研究和实车标定,最终可以建立完整的电机转速主动阻尼控制的控制策略和模型,并在实车上进行标定,以验证该控制策略的可行性。
4.1 电机转速主动阻尼控制模型电机转速主动阻尼控制MATLAB/Simulink模型如图4.1所示:4.2 电机转速主动阻尼控制模型仿真根据2.2节和3.2节建立的仿真模型,建立电机主动阻尼控制的仿真模型。
此时可以将实车采集的电机实际转速导入仿真模型中,对仿真模型的仿真参数进行进一步的仿真标定;也可以直接将模型集成在纯电动汽车整车控制器的控制模型中进行实车标定。
4.3 电机转速主动阻尼控制策略实车标定根据建立的纯电动汽车电机主动阻尼控制模型,在实车上展开标定,主要针对纯电动汽车使用过程中的正常使用工况和常见的滥用工况进行标定和验证,具体的结果如图4.1-4.5所示:根据实车标定结果,本文所建立电机输出转速主动阻尼控制策略的可行性得到验证。
同时,在实车上对电机输出转速主动阻尼控制模型的参数进行标定,并在实车上进行应用。
实车标定结果显示,当电机转速出现波动以后,电机转速主动阻尼控制能够对整车控制器的电机扭矩指令进行调节,抑制电机非期望的转速波动,进而提升纯电动汽车的驾乘体验。
然而,由于整车控制器运行周期以及与CAN总线进行通讯均需要一定时间,尤其是滤波算法固有的迟滞性,因此相对于电机转速的实际变化趋势,电机输出转速主动阻尼控制策略的调节扭矩不可避免的存在一定延迟。
并且本策略只有在电机转速已经出现波动的情况下,才能对电机输出扭矩进行相应的补偿。
因此,本策略只能从提升整车层面的驾驶性角度,闭环电机出现持续的转速波动问题。
5 总结本文研究了一种电机转速主动阻尼控制策略,建立了电机转速主动阻尼控制MATLAB/Simulink模型,并进行了相关的实车参数标定和验证。
1)根据一阶RC滤波算法建立电机输出转速滤波控制模型,经过参数的实车标定,作为电机转速主动阻尼控制策略的闭环目标;2)根据经典PID算法建立电机输出转速PID控制模型,经过参数的实车标定,作为电机转速主动阻尼控制策略的调节扭矩,用来闭环电机输出转速的波动;3)最终,将电机转速滤波模型和电机输出扭矩PID控制模型整合在实车上展开标定和验证。