大众汽车车载网络系统概述
- 格式:pptx
- 大小:1.93 MB
- 文档页数:5
汽车车载网络系统随着汽车技术日新月异的发展,以及电子技术和控制技术在汽车上的大量应用,汽车上采用的电子控制模块越来越多.由原来的几块发展到现在的几十块,显然传统的数据传输方式已不能满足模块间数据传输的要求.新型汽车的控制系统中采用了一种新型的数据传输网络,英文缩写为CAN(ControllerAreaNetwork),其目的是使汽车控制系统的数据传输实现高速化,并使汽车控制系统简单化.新型大众POLO乘用车即采用了这种局城网络控制系统。
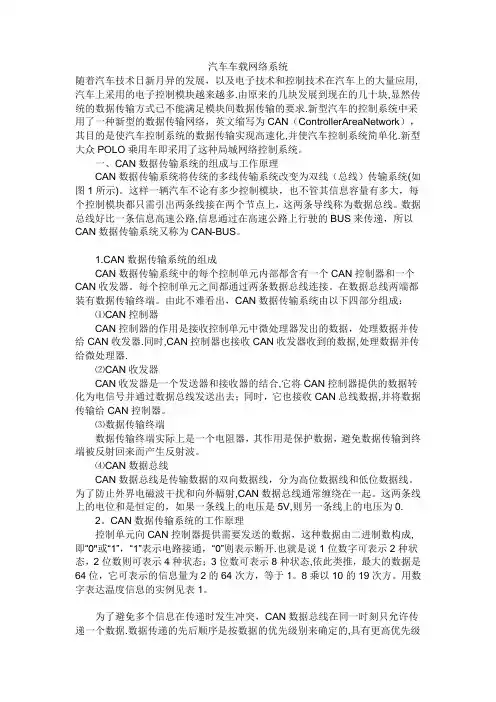
一、CAN数据传输系统的组成与工作原理CAN数据传输系统将传统的多线传输系统改变为双线(总线)传输系统(如图1所示)。
这样一辆汽车不论有多少控制模块,也不管其信息容量有多大,每个控制模块都只需引出两条线接在两个节点上,这两条导线称为数据总线。
数据总线好比一条信息高速公路,信息通过在高速公路上行驶的BUS来传递,所以CAN数据传输系统又称为CAN-BUS。
1.CAN数据传输系统的组成CAN数据传输系统中的每个控制单元内部都含有一个CAN控制器和一个CAN收发器。
每个控制单元之间都通过两条数据总线连接。
在数据总线两端都装有数据传输终端。
由此不难看出,CAN数据传输系统由以下四部分组成:⑴CAN控制器CAN控制器的作用是接收控制单元中微处理器发出的数据,处理数据并传给CAN收发器.同时,CAN控制器也接收CAN收发器收到的数据,处理数据并传给微处理器.⑵CAN收发器CAN收发器是一个发送器和接收器的结合,它将CAN控制器提供的数据转化为电信号并通过数据总线发送出去;同时,它也接收CAN总线数据,并将数据传输给CAN控制器。
⑶数据传输终端数据传输终端实际上是一个电阻器,其作用是保护数据,避免数据传输到终端被反射回来而产生反射波。
⑷CAN数据总线CAN数据总线是传输数据的双向数据线,分为高位数据线和低位数据线。
为了防止外界电磁波干扰和向外幅射,CAN数据总线通常缠绕在一起。
简诉车载网络中abcde五大类车载网络是基于CAN、LIN、FlexRay、MOST、以太网等总线技术建立的标准化整车网络,实现车内各电器、电子单元间的状态信息和控制信号在车内网上的传输,使车辆具有状态感知、故障诊断和智能控制等功能。
车载自组织网络是基于短距离无线通信技术自主构建的V2V、V2I、V2P之间的无线通信网络,实现V2V、V2I、V2P之间的信息传输,使车辆具有行驶环境感知、危险辨识、智能控制等功能,并能够实现V2V、V2I之间的协同控制。
车载移动互联网络是基于远距离通信技术构建的车辆与互联网之间连接的网络,实现车辆信息与各种服务信息在车载移动互联网上的传输,使智能网联汽车用户能够开展商务办公、信息娱乐服务等。
车载网络车载网络划分为5种类型,分别为A类低速网络、B类中速网络、C类高速网络、D类多媒体网络和E类安全应用网络。
A类低速网络传输速率一般小于10kbit/s,有多种通信协议,该类网络的主流协议是LIN(局域互联网络),主要用于电动门窗、电动座椅、车内照明系统和车外照明系统等。
B类中速网络传输速率在10~125kbit/s之间,对实时性要求不太高,主要面向独立模块之间数据共享的中速网络。
该类网络的主流协议是低速CAN(控制器局域网络),主要用于故障诊断、空调、仪表显示等。
C类高速网络传输速率在125~1000kbit/s之间,对实时性要求高,主要面向高速、实时闭环控制的多路传输网。
该类网络的主流协议是高速CAN、FlexRay等协议,主要用于牵引力控制、发动机控制、ABS、ASR、ESP、悬架控制等。
D类多媒体网络传输速率在250kbit/s~100Mbit/s之间,该类网络协议主要有MOST、以太网、蓝牙、ZigBee技术等,主要用于要求传输效率较高的多媒体系统、导航系统等。
E类安全网络传输速率为10Mbit/s,主要面向汽车安全系统的网络。

课题汽车车载网络系统概述(二)课时4课时(180min)教学目标知识技能目标:(1)熟悉新能源汽车的安全防护措施(2)了解汽车车载网络系统常用检修仪器、故障类型和检修方法素质目标:(1)培养兢兢业业、无私奉献的职业精神(2)弘扬精益求精、科学严谨、追求卓越的工匠精神教学重睢点教学重点:新能源汽车的安全防护措施,汽车车载网络系统常用检修仪器和故障类型教学难点:汽车车载网络系统的检修方法教学方法情景模拟法、问答法、讨论法教学用具电脑、投影仪、多媒体课件、教材教学过程主要教学内容及步骤课前任努【教师】布置课前任务,和学生负责人取得联系,让其提醒同学通过APP或其他学习软件,提前预习本节课要讲的知识,井下载”任务工单——熟悉汽车车载网络系统检修的相关知识”【学生】完成课前任务考勤【教师】使用APP进行签到【学生】按照老师要求签到互动导入【教师】讲述情景,井提出问题当汽车车载网络系统发生故障时,检修人员需要对其进行检修。
正确地选取和使用各种检修仪器,并采取正确的检修方法,对提高检修作业效率、保障设备完整及确保人身安全来说是十分重要的。
一天,小王想用万用表对汽车车载网络系统进行检修,但是他不知道如何使用该仪器,于是向旁边的张师傅请教,最终学会了万用表的使用方法,成功找到了发生故障的部位,并对该部位进行了检修。
请大家思考:除了万用表,还有哪些常见的汽车车载网络系统检修仪器呢?如何对发生故障的汽车车载网络系统进行检修呢?【学生】聆听、思考、讨论、回答传授新知【教师】通过大家的发言,引入新的知识点,讲解新能源汽车的安全防护措施及汽车车载网络系统常用检修仪器、故障类型和检修方法1.2.1汽车车载网络系统的常用检修仪器汽车车载网络系统的常用检修仪器有万用表、示波器和汽车检测仪。
1.万用表【教师】通过多媒体展示“数字式万用表”图片,并进行讲解万用表是万用电表的简称,是一种最常用的电子检测仪器。
按工作原理的不同,万用表一般分为指针式和数字式两种。


大众汽车车载网络系统简介大众汽车车载网络系统是指安装在大众汽车上的一套网络系统,用于提供车辆信息、娱乐、导航和通信等功能。
车载网络系统的发展已经成为汽车行业的一个重要趋势,为驾驶员和乘客提供了更多便利和舒适的体验。
功能特点车辆信息大众汽车车载网络系统能够通过传感器和控制器收集车辆的各种信息,例如车速、油耗、里程等。
这些数据可以通过车载网络系统的显示屏展示给驾驶员,帮助其更好地了解车辆的状态。
车载网络系统为车内乘客提供了丰富的娱乐功能。
乘客可以通过系统连接到互联网,观看在线视频、听取音乐、玩游戏等。
此外,系统还支持蓝牙连接,乘客可以通过蓝牙连接手机,播放自己的音乐和视频。
导航系统大众汽车车载网络系统配备了先进的导航功能。
驾驶员可以通过系统输入目的地信息,系统会根据实时交通情况提供最佳的路线规划。
导航系统还支持语音导航,驾驶员可以通过语音与系统进行交互。
通信功能车载网络系统支持蓝牙电话功能,驾驶员可以通过系统与手机进行蓝牙连接,实现免提通话。
乘客还可以通过系统发送和接收短信,使用手机上的通讯应用进行通信。
大众汽车车载网络系统采用了现代化的技术架构,以满足复杂的车辆信息处理和通信需求。
硬件车载网络系统的硬件主要包括中央处理器单元(CPU)、显示屏、触摸屏、声音处理器、传感器等。
中央处理器单元负责处理各种信息和指令,显示屏用于展示图像和文字信息,触摸屏用于用户输入和操作,声音处理器用于音频输出,传感器用于收集车辆信息。
软件车载网络系统的软件主要包括操作系统、应用程序和驱动程序。
操作系统负责管理硬件和应用程序的资源,提供系统级别的服务和功能。
应用程序包括娱乐、导航、通信等功能模块,驱动程序用于与硬件设备的交互。
车载网络系统通过无线网络实现与互联网的连接。
它可以通过内置的无线模块连接到Wi-Fi网络,也可以通过蜂窝网络(如4G)实现移动数据连接。
网络连接为车载网络系统提供了丰富的在线资源,例如在线地图、音乐和视频流媒体。
大众ID.4X网络架构详解ID系列是大众发力新能源的重要品牌,之前也对其电子电气架构、高压系统、刹车系统(回看可以戳——>详细揭秘大众ID.4的高压系统、大众ID.4的刹车系统、大众ID.4的电子电气架构解析)做过简单的梳理。
通常在网上能了解到的是如图1所示,基本知识勾勒了一个基本的架构,对于各个小方块是什么控制器并没有注明。
图1 大众三域网络架构最近刚好手上有一些上汽大众ID.4 X技术资料,今天就来具体其电子电气架构的内部。
对于大众的三域架构。
首先来看看详细的ID.4 X的网络架构,如图2所示,其详尽的描述了各控制单元,各控制单元在网络架构中所处的网段的位置一清二楚。
图2 详细的ID.4的网络架构其网络架构中共使用了13个子网络:1.CAN-FD EV :主要连接DC/DC、BMC、AC充电机等,速率为2M/s;2.蓄电池CAN:用于连接电池管理单元BMC与从板CMC,速率为500k/s;3.MFL-CAN:用于ICAS1与电动转向之间的连接,速率为500k/s;4.底盘CAN-FD:用于ICSA1与ESC、刹车系统eBKV、EPS连接,速率为2M/s;5.驱动CAN-FD:用于连接ICSA1与驱动单元、安全气囊,速率为2M/s,好奇为什么安全气囊会放在驱动CAN里;6.AFS-CAN:用于连接ICAS1与大灯和E-sound,速率为500k/s;7.舒适CAN:用于连接ICAS1与座椅、天窗、车门等控制单元,速率为500k/s;8.驾驶员辅助CAN-FD:用于连接ICAS1与ACC、PLA、RVC、MFK等,速率为2M/s;9.100M以太网:用于ICAS1与ACC、PLA、RVC、MFK之间以及外部诊断之间的连接,速率为100M/s;10.1G以太网:用于ICAS1与ICAS3,以及ICAS1与OCU4之间的连接,速率为1G/s;11.Con.-CAN:用于ICAS1与KESSY之前的连接。