闭合导线复测自动计算
- 格式:xls
- 大小:38.00 KB
- 文档页数:3
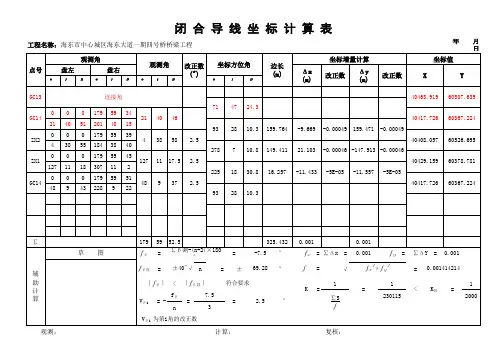
闭合导线计算表
excel中将角度(°)转化成(°′″)函数:
excel输入小数的“度”数,可以用时间的表示方法表示为“度分秒”=A1/24,设置为自定义格式:[h]°mm′ss″;
“度分秒”转为小数的度数时则乘24。
需自己写入数据
无需改变的数据
如点号较多,则在中间加空格即可
48°00'00"
说明:
EXCEL中关于角度的输入、输出及转换计算技巧
EXCEL为每个日期定义了一个序列号,以1900年1月1日为1,1900年1月2日为2,以此类推。
将时间格式转化为度分秒步骤为:(例如)231°02′30″
1:鼠标左键先点击空格-右键点击-设置单元格格式-数字-自定义格式:[h]°mm′ss″-确定;
2:鼠标右键先点击空格-输入2-确定-及为48°00′00″-输入1-确定-及为24°00′00″-左上角出现1899-12-31 0:00:00-改0:00:00为0:02:30
按确定-及为24°02′30″。
例:231°02′30″;鼠标右键先点击空格-输入2-确定-及为48°00′00″-右键再点击出现1900-1-1 0:00:00;31号到1号为48小时;故
231/24等于9天,再将9乘以24等于216,231°-216°=15°;将1900-1-1改为1900-1-8;将0:00:00改为15:02:30及1900-1-8 15:02:30-确定
及得231°02′30″。
然后下面可将excel按正常进行加减乘除了。
闭合导线内业计算公式1. 引言在测量和勘测中,闭合导线是一种常用的测量方式。
闭合导线是指通过一系列的测量点,再返回起点形成一个闭合的测量环路。
在进行闭合导线测量时,需要进行一系列的内业计算,以获得最终的测量结果。
本文将介绍闭合导线内业计算的公式和步骤。
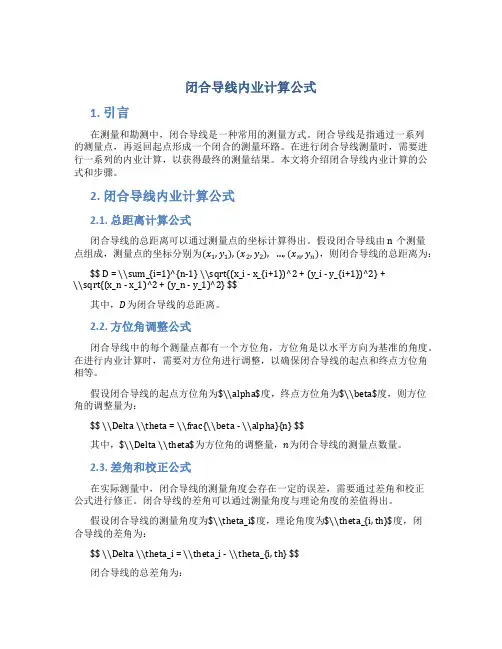
2. 闭合导线内业计算公式2.1. 总距离计算公式闭合导线的总距离可以通过测量点的坐标计算得出。
假设闭合导线由n个测量点组成,测量点的坐标分别为(x1,y1), (x2,y2), …, (x n,y n),则闭合导线的总距离为:$$ D = \\sum_{i=1}^{n-1} \\sqrt{(x_i - x_{i+1})^2 + (y_i - y_{i+1})^2} +\\sqrt{(x_n - x_1)^2 + (y_n - y_1)^2} $$其中,D为闭合导线的总距离。
2.2. 方位角调整公式闭合导线中的每个测量点都有一个方位角,方位角是以水平方向为基准的角度。
在进行内业计算时,需要对方位角进行调整,以确保闭合导线的起点和终点方位角相等。
假设闭合导线的起点方位角为$\\alpha$度,终点方位角为$\\beta$度,则方位角的调整量为:$$ \\Delta \\theta = \\frac{\\beta - \\alpha}{n} $$其中,$\\Delta \\theta$为方位角的调整量,n为闭合导线的测量点数量。
2.3. 差角和校正公式在实际测量中,闭合导线的测量角度会存在一定的误差,需要通过差角和校正公式进行修正。
闭合导线的差角可以通过测量角度与理论角度的差值得出。
假设闭合导线的测量角度为$\\theta_i$度,理论角度为$\\theta_{i, th}$度,闭合导线的差角为:$$ \\Delta \\theta_i = \\theta_i - \\theta_{i, th} $$闭合导线的总差角为:$$ \\Delta \\theta = \\sum_{i=1}^{n-1} \\Delta \\theta_i + \\theta_n -\\theta_{n, th} $$其中,$\\Delta \\theta_i$为第i个测量角的差角,$\\Delta \\theta$为闭合导线的总差角。
第一篇导线复测一、导线复测的内容当路线线形主要由导线控制时,导线的点位精度及密度直线影响施工放线的质量。
导线测量的内容包括:1、检查导线(网)是否符合规范及有关规定要求,平差计算是否经过有关方面检查与验收。
2、导线点密度是否满足施工放线的要求,必须时应进行加密,以保证在道路施工的全工程中,相邻导线点间能相互通视。
3、检查导线点的是否丢失、移动、并进行必要的点位恢复工作。
二、导线复测的外业导线复测的外业工作主要包括水准测量和距离测量以及导线点的饿加密等。
(一)、水准角的测量导线的水平角测量应使用不低于DJ6 级经纬仪,按测回法进行观测。
在附和导线中采用测量左角和右角,在闭和导线中均测内角。
(二)、导线边长测量导线边长应优先采用光电测距仪测量,无条件时,也可采用钢尺及经纬仪测距,采用测距仪测量导线边长时,距离和竖直角应往返观测一回,距离一测回读数两次,边长采用往测平距,返测平距仅作参考。
(三)、导线测量的技术要求各级主要技术参数表1-1测回数等级导线长度(km)平均边长(km)测角误差(〞)DJ6 DJ2角度闭合差(〞)相对闭合差一级 4 0.5 5 4 2 10 n 1/15000二级 2.4 0.25 8 3 1 16 n 1/10000三级 1.2 0.1 12 2 1 24 n 1/5000(四)、导线加 D2 D1-1原导线不能满足要求时,应进行导线点加密,以保证在道路施工的全过程中,相邻导线间不能通视。
加密的导线点 D1可以采用传统的方法,如线形三角锁、图根导线、交会法等。
然而,随着红 D1-2 (1-1) D1-3外测距仪的广乏使用,特别是全站仪的使用,采用支导线点更为方便。
如图1-1 所示,D1、D2 为已知导线点,待加密点为D1-1、D1-2、……。
现以全站仪支导线为例,简述其导线点加密的一般过程:1、在测站D1 上安置仪器,开机;2、输入测站D1 的坐标、仪器高、棱镜高;3、瞄准后视点D2,输入D2 的坐标或方位角;4、转动望远镜,瞄准待加点D1-1 上的反射棱镜,按下测键,稍后即可得到加密点的坐标。

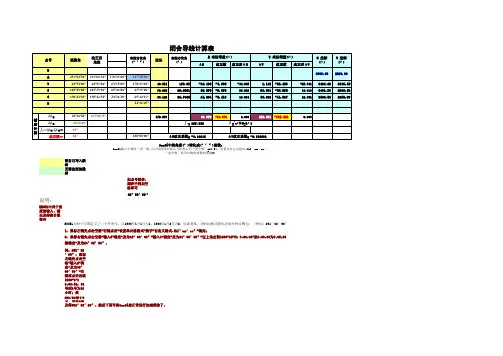
附合导线平差计算表(左角用)
计算:检查:
注意事项:
1、使用时,先根据实际点数的多少插入或删除行数。
但第五行和第六行不得删除,夹角个数行及上6行不要删除,目的是为了保
持公式的正确性,行数确定后,从第六行F列到W列选中,把公式拉到您需要的行数
2、“蓝色”字体表示计算时,需要输入的项目,根据实际数据情况进行填写。
3、要根据使用的等级导线,来修改“角度闭合差限差”计算公式(N20数据)及“导线全长相对闭合差”(Q22数据)
4、如果“N21”和“Q22”显示超限则数据不可用,要重新进行测量
5、计算好后可以把不需要显示的列隐藏起来,如“M”列
)
附合导线平差计算表(右角用)。
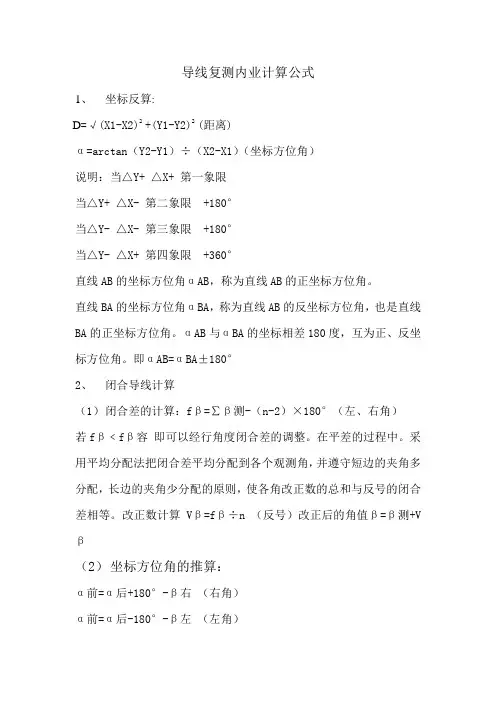
导线复测内业计算公式1、坐标反算:D=√(X1-X2)2 +(Y1-Y2)2 (距离)α=arctan(Y2-Y1)÷(X2-X1)(坐标方位角)说明:当△Y+ △X+ 第一象限当△Y+ △X- 第二象限 +180°当△Y- △X- 第三象限 +180°当△Y- △X+ 第四象限 +360°直线AB的坐标方位角αAB,称为直线AB的正坐标方位角。
直线BA的坐标方位角αBA,称为直线AB的反坐标方位角,也是直线BA的正坐标方位角。
αAB与αBA的坐标相差180度,互为正、反坐标方位角。
即αAB=αBA±180°2、闭合导线计算(1)闭合差的计算:fβ=∑β测-(n-2)×180°(左、右角)若fβ﹤fβ容即可以经行角度闭合差的调整。
在平差的过程中。
采用平均分配法把闭合差平均分配到各个观测角,并遵守短边的夹角多分配,长边的夹角少分配的原则,使各角改正数的总和与反号的闭合差相等。
改正数计算Vβ=fβ÷n (反号)改正后的角值β=β测+V β(2)坐标方位角的推算:α前=α后+180°-β右(右角)α前=α后-180°-β左(左角)(3)坐标增量计算闭合差计算与改正:△X=l×CosαAB △Y= l×SinαAB (l是距离)fx=∑△X测 fy=∑△Y测f=√fx2 + fy2 K=f÷L=1÷(L÷f)﹤K容(L是路线的全长)若K﹤K容可进行坐标增量闭合差的改正,就是将fx、fy按边长成正比反号分配到各坐标增量上。
反之则重测。
改正数计算:Vx(y)= fx(y)÷L×l (反号) 改正后坐标增量:△X后=△X+ Vx △Y后=△Y+ Vy (4)导线点坐标计算:X=X0+△X后Y=Y0+△Y后3、附和导线计算(1)闭合差的计算:fβ=∑β测-α终-α始+n×180°(左角)fβ=∑β测-α始-α终+n×180°(右角)若fβ﹤fβ容即可以经行角度闭合差的调整。
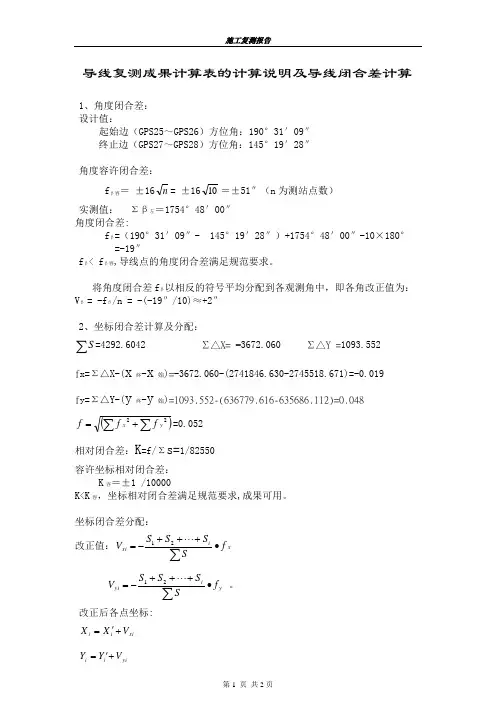
1、角度闭合差: 设计值: 起始边(GPS25~GPS26)方位角:190°31′09″终止边(GPS27~GPS28)方位角:145°19′28″角度容许闭合差:f β容= ±16n = ±1610=±51″(n 为测站点数)实测值: Σβ左=1754°48′00″ 角度闭合差:f β=(190°31′09″- 145°19′28″)+1754°48′00″-10×180° =-19″f β< f β容,导线点的角度闭合差满足规范要求。
将角度闭合差f β以相反的符号平均分配到各观测角中,即各角改正值为: V β = -f β/n = -(-19″/10)≈+2″ 2、坐标闭合差计算及分配:∑S =4292.6042 Σ△X= -3672.060 Σ△Y =1093.552f x=Σ△X-(x 终-x 始)=-3672.060-(2741846.630-2745518.671)=-0.019f y=Σ△Y-(y 终-y始)=1093.552-(636779.616-635686.112)=0.048()∑∑+=22yxfff =0.052相对闭合差:K =f/Σs=1/82550容许坐标相对闭合差:K 容=±1 /10000K<K 容,坐标相对闭合差满足规范要求,成果可用。
坐标闭合差分配: 改正值:x ixi f S S S S V •+++-=∑21y iyi f SS S S V •+++-=∑ 21 。
改正后各点坐标:V X X +'=1、角度闭合差: 设计值: 起始边(GPS31~GPS32)方位角:223°00′29″终止边(GPS25~GPS26)方位角:190°31′09″角度容许闭合差:f β容= ±16n = ±16√18=±68″(n 为测站点数)实测值: Σβ左=3207°29′40″ 角度闭合差:f β=(223°00′29″- 190°31′09″)+3207°29′40″-18×180° =-60″f β< f β容,导线点的角度闭合差满足规范要求。
1、角度闭合差: 设计值: 起始边(GPS25~GPS26)方位角:190°31′09″终止边(GPS27~GPS28)方位角:145°19′28″角度容许闭合差:f β容= ±16n = ±1610=±51″(n 为测站点数)实测值: Σβ左=1754°48′00″ 角度闭合差:f β=(190°31′09″- 145°19′28″)+1754°48′00″-10×180° =-19″f β< f β容,导线点的角度闭合差满足规范要求。
将角度闭合差f β以相反的符号平均分配到各观测角中,即各角改正值为: V β = -f β/n = -(-19″/10)≈+2″ 2、坐标闭合差计算及分配:∑S =4292.6042 Σ△X= -3672.060 Σ△Y =1093.552f x=Σ△X-(x 终-x 始)=-3672.060-(2741846.630-2745518.671)=-0.019f y=Σ△Y-(y 终-y始)=1093.552-(636779.616-635686.112)=0.048()∑∑+=22yxfff =0.052相对闭合差:K =f/Σs=1/82550容许坐标相对闭合差:K 容=±1 /10000K<K 容,坐标相对闭合差满足规范要求,成果可用。
坐标闭合差分配: 改正值:x ixi f S S S S V •+++-=∑21y iyi f SS S S V •+++-=∑ 21 。
改正后各点坐标:V X X +'=1、角度闭合差: 设计值: 起始边(GPS31~GPS32)方位角:223°00′29″终止边(GPS25~GPS26)方位角:190°31′09″角度容许闭合差:f β容= ±16n = ±16√18=±68″(n 为测站点数)实测值: Σβ左=3207°29′40″ 角度闭合差:f β=(223°00′29″- 190°31′09″)+3207°29′40″-18×180° =-60″f β< f β容,导线点的角度闭合差满足规范要求。
测量闭合导线计算方法 The manuscript was revised on the evening of 2021如表7-3,已知A点坐标X=,Y=,方位角150度48分12秒.第一步:站点在B,后视A点,前视C点,得到B点的观测左角,及AB距离,转站C,后视B,前视D,得到C点观测左角, 及BC距离,转站D,后视C,前视A,得到D点观测左角, 及CD距离,转站A,后视D,前视B,得到A点观测左角, 及AB距离,第二步:计算A:角度闭合与调差1:观测角总和:98。
39,36,,+88。
36,08,,+87。
25,30,,+85。
18,00,, =359。
59,14,,2:闭合差值: 实测值-(N-2)×180=359。
59,14,,-(4-2)×180=-46”(N为测站数) 3:闭合调整-(-46)÷4=+(角度闭合差反符号平均分配到各观测角中,如有小数,按长边少分,短边多分原则)4:改正后角度:B观测角=98。
39,36,,+12”=98。
39,36”C观测角=88。
36,08,,+11”=88。
36,19”D观测角=87。
25,30,,+11”=87。
25,41”A观测角=85。
18,00,,+12”=85。
18,12”5:求方位角:A(待求点)=A(前一边方位角)+观测角(左角取得正,右角取负)±180(实际计算时,如方位角+转角大于是180时应减去180,小于180,应加180,结果为负时应减360)B方位角=(150。
48,12,,+98。
39,48),,-180。
=69。
28,00”(方位角+转角大于180所以要减180)C方位角=69。
28,00,,+88。
36,19”+180。
=338。
04,19”(方位角+转角大于180所以要加180)D方位角=338。
04,19”+87。
25,30,,-180。
=245,30,00”(方位角+转角大于180所以要减180)A方位角=245。