第6章(形函数)
- 格式:doc
- 大小:541.50 KB
- 文档页数:14

公式号 6.1 图6-1第六章 单元形函数的讨论在有限单元法的基本理论中,形函数是一个十分重要的概念,它不仅可以用作单元的内插函数,把单元内任一点的位移用结点位移表示,而且可作为加权余量法中的加权函数,可以处理外载荷,将分布力等效为结点上的集中力和力矩,此外,它可用于后续的等参数单元的坐标变换等。
根据形函数的思想,首先将单元的位移场函数表示为多项式的形式,然后利用结点条件将多项式中的待定参数表示成场函数的结点值和单元几何参数的函数,从而将场函数表示成结点值插值形式的表达式。
在本节中,重点讨论几种典型单元的形函数插值函数的构造方式,它们具有一定的规律。
然后以平面三角形单元为例,讨论了形函数的性质,在此基础上分析了有限元的收敛准则。
6.1形函数构造的一般原理单元的类型和形状决定于结构总体求解域的几何特点、问题类型和求解精度。
根据单元形状,可分为一维、二维、三维单元。
单元插值形函数主要取决于单元的形状、结点类型和单元的结点数目。
结点的类型可以是只包含场函数的结点值,也可能还包含场函数导数的结点值。
是否需要场函数导数的结点值作为结点变量一般取决于单元边界上的连续性要求,如果边界上只要求函数值保持连续,称为C0型单元,若要求函数值及其一阶导数值都保持连续,则是C1型单元。
在有限元中,单元插值形函数均采用不同阶次的幂函数多项式形式。
对于C0型单元,单元内的未知场函数的线性变化仅用角(端)结点的参数来表示。
结点参数只包含场函数的结点值。
而对于C1型单元,结点参数中包含场函数及其一阶导数的结点值。
与此相对应,形函数可分为Lagrange 型(不需要函数在结点上的斜率或曲率)和Hermite 型(需要形函数在结点上的斜率或曲率)两大类,而形函数的幂次则是指所采用的多项式的幂次,可能具有一次、二次、三次、或更高次等。
另外,有限元形函数[N ]是坐标x 、y 、z 的函数,而结点位移不是x 、y 、z 的函数,因此静力学中的位移对坐标微分时,只对形函数[N ]作用,而在动力学中位移对时间t 微分时,只对结点位移向量作用。
第六章函数的概念和图象一、内容综述:1.函数的有关概念:一般地,设在某变化过程中有两个变量x,y。
如果对于x在某一范围内的每一个确定的值,y都有唯一确定的值与它对应,那么就说y是x的函数,x叫做自变量,y叫因变量。
对于函数的意义,应从以下几个方面去理解:(1)我们是在某一变化过程中研究两个变量的函数关系,在不同研究过程中,变量与常量是可以相互转换的,即常量和变量是对某一过程来说的,是相对的。
(2)对于变量x允许取的每一个值,合在一起组成了x的取值范围。
(3)变量x与y有确定的对应关系,即对于x允许取的每一个值,y都有唯一确定的值与它对应。
2.函数值与函数值有关的问题可以转化为求代数式的值。
二、例题分析:例1.判断y=x与y=是否是同一函数。
解:∵ y==|x|当x≥0时,y=x,当x<0时, y=-x.∴ y=x与y=不是同一函数。
说明:虽然这两个函数的自变量取值范围都是全体实数,但当x<0时,两个函数的对应关系不同(如当x=-2时,y=x=-2, 而y==2), 所以它们不是同一个函数。
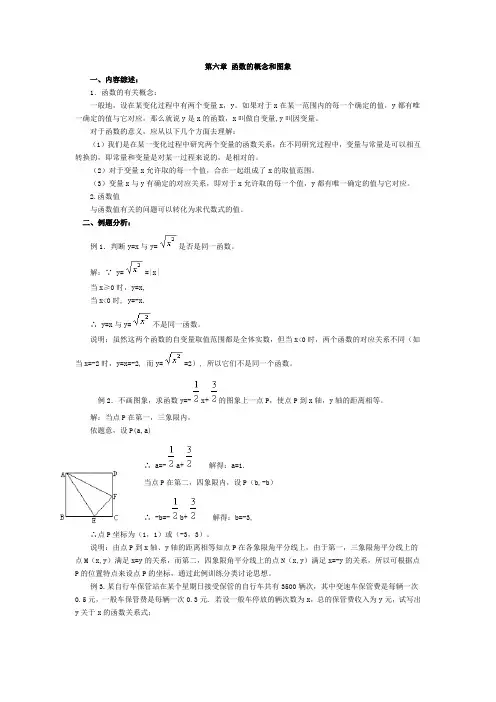
例2.不画图象,求函数y=-x+的图象上一点P,使点P到x轴,y轴的距离相等。
解:当点P在第一,三象限内,依题意,设P(a,a)∴ a=-a+解得:a=1.当点P在第二,四象限内,设P(b,-b)∴ -b=-b+解得:b=-3,∴点P坐标为(1,1)或(-3,3)。
说明:由点P到x轴、y轴的距离相等知点P在各象限角平分线上,由于第一,三象限角平分线上的点M(x,y)满足x=y的关系,而第二,四象限角平分线上的点N(x,y)满足x=-y的关系,所以可根据点P的位置特点来设点P的坐标,通过此例训练分类讨论思想。
例3.某自行车保管站在某个星期日接受保管的自行车共有3500辆次,其中变速车保管费是每辆一次0.5元,一般车保管费是每辆一次0.3元. 若设一般车停放的辆次数为x,总的保管费收入为y元,试写出y关于x的函数关系式;分析:由一般车辆停放次数x表示变速停放的辆次数,由保管费列出函数关系再化简,但要在函数式后注明自变量x的取值范围。
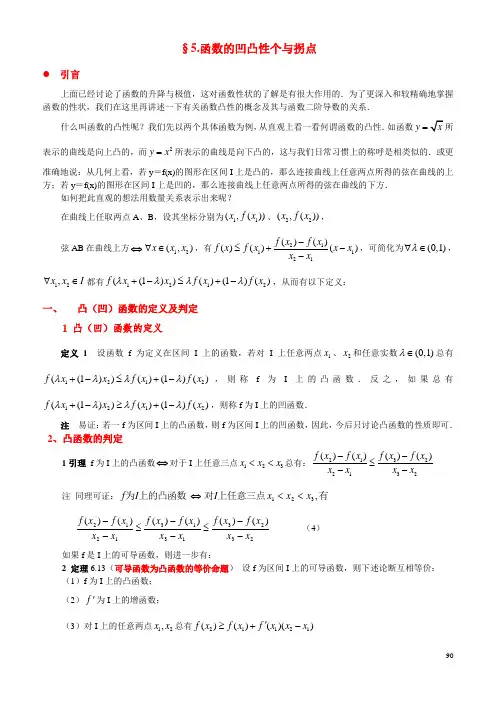
§5.函数的凹凸性个与拐点引言上面已经讨论了函数的升降与极值,这对函数性状的了解是有很大作用的.为了更深入和较精确地掌握函数的性状,我们在这里再讲述一下有关函数凸性的概念及其与函数二阶导数的关系.什么叫函数的凸性呢?我们先以两个具体函数为例,从直观上看一看何谓函数的凸性.如函数y 所表示的曲线是向上凸的,而2y x =所表示的曲线是向下凸的,这与我们日常习惯上的称呼是相类似的.或更准确地说:从几何上看,若y =f(x)的图形在区间I 上是凸的,那么连接曲线上任意两点所得的弦在曲线的上方;若y =f(x)的图形在区间I 上是凹的,那么连接曲线上任意两点所得的弦在曲线的下方.如何把此直观的想法用数量关系表示出来呢?在曲线上任取两点A 、B ,设其坐标分别为11(,())x f x 、22(,())x f x ,弦AB 在曲线上方⇔12(,)x x x ∀∈,有211121()()()()()f x f x f x f x x x x x -≤+--,可简化为(0,1)λ∀∈,12,x x I ∀∈都有1212((1))()(1)()f x x f x f x λλλλ+-≤+-,从而有以下定义:一、 凸(凹)函数的定义及判定1 凸(凹)函数的定义定义1 设函数f 为定义在区间I 上的函数,若对I 上任意两点1x 、2x 和任意实数(0,1)λ∈总有1212((1))()(1)()f x x f x f x λλλλ+-≤+-,则称f 为I 上的凸函数.反之,如果总有1212((1))()(1)()f x x f x f x λλλλ+-≥+-,则称f 为I 上的凹函数.注 易证:若一f 为区间I 上的凸函数,则f 为区间I 上的凹函数,因此,今后只讨论凸函数的性质即可.2、凸函数的判定1引理 f 为I 上的凸函数⇔对于I 上任意三点123x x x <<总有:32212132()()()()f x f x f x f x x x x x --≤-- 注 同理可证:有上任意三点对上的凸函数为,321x x x I I f <<⇔232313131212)()()()()()(x x x f x f x x x f x f x x x f x f --≤--≤-- (4) 如果f 是I 上的可导函数,则进一步有:2 定理6.13(可导函数为凸函数的等价命题) 设f 为区间I 上的可导函数,则下述论断互相等价:(1)f 为I 上的凸函数;(2)f '为I 上的增函数;(3)对I 上的任意两点12,x x 总有21121()()()()f x f x f x x x '≥+-如果f 在I 上二阶可导,则进一步有:3定理6.14(凸函数与二阶导数的关系) 设f 为I 上的二阶可导函数,则在I 上f 为凸(凹)函数⇔()0f x ''>(()0f x ''<),x I ∈. 二、 曲线的拐点定义及判定1 定义2 设曲线y =f(x)在点(00,()x f x )处有穿过曲线的切线,且在切点近旁,曲线在切线的两侧分别是严格凸或严格凹的,这时称(00,()x f x )为曲线y =f(x)的拐点.注:拐点是严格凸与严格凹的分界点2定理6.15(拐点必要条件) 若f 在0x 二阶可导,则(00,()x f x )为曲线y =f(x)的拐点的必要条件是0()0f x ''=.综上知:(00,()x f x )的拐点,则要么(1)0()0f x ''=;要么(2)f 在0x 点不可导.3定理6.16 设f 在点0x 可导,在某邻域0()U x 内二阶可导,若在0()U x +和0()U x -上()f x ''的符号相反,则(00,()x f x )为曲线y =f(x)的拐点.;注:(00,()x f x )是曲线y=f (x)的一个拐点,但y =f(x)在点0x的导数不一定存在,如y =在x =0的情形.三、应用举例(1)利用上述等价命题验证函数的凹凸性,确定凹凸区间.例1 讨论函数()arctan f x x =的凸(凹)性及拐点.(2)证明不等式例2:(Jensen 不等式)若f 为],[b a 上凸函数,则对任意),,2,1(0],,[n i b a x i i =>∈λ11=∑=n i i λ,有)()(11ini i i n i i x f x f ∑∑==≤λλ 例3 证明均值不等式:,,,21+∈∀R a a a n 有na a a a a a a a a nn n n n +++≤≤+++ 212121111 作业:P153 1(2)(4),2,3,4,5。
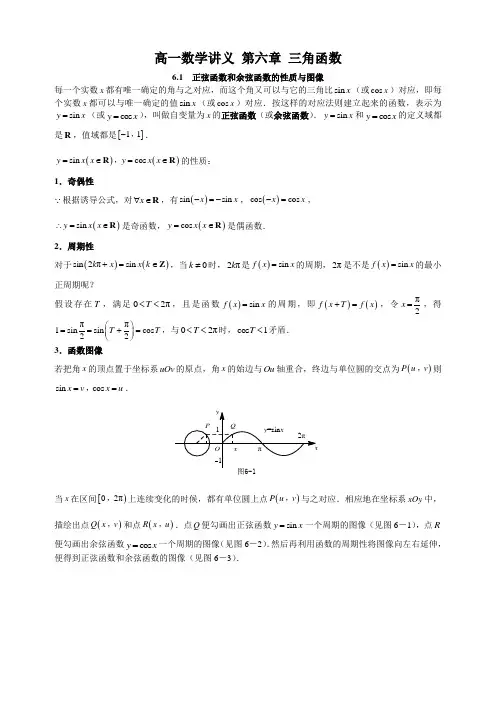
高一数学讲义 第六章 三角函数6.1 正弦函数和余弦函数的性质与图像每一个实数x 都有唯一确定的角与之对应,而这个角又可以与它的三角比sin x (或cos x )对应,即每个实数x 都可以与唯一确定的值sin x (或cos x )对应.按这样的对应法则建立起来的函数,表示为sin y x =(或cos y x =),叫做自变量为x 的正弦函数(或余弦函数).sin y x =和cos y x =的定义域都是R ,值域都是[]11-,. ()()sin cos y x x y x x =∈=∈R R ,的性质:1.奇偶性根据诱导公式,对x ∀∈R ,有()sin sin x x -=-,()cos cos x x -=, ()sin y x x ∴=∈R 是奇函数,()cos y x x =∈R 是偶函数.2.周期性对于()()sin 2πsin k x x k +=∈Z ,当0k ≠时,2πk 是()sin f x x =的周期,2π是不是()sin f x x =的最小正周期呢?假设存在T ,满足02πT <<,且是函数()sin f x x =的周期,即()()f x T f x +=,令π2x =,得ππ1sinsin cos 22T T ⎛⎫==+= ⎪⎝⎭,与02πT <<时,cos 1T <矛盾. 3.函数图像 若把角x 的顶点置于坐标系uOv 的原点,角x 的始边与Ou 轴重合,终边与单位圆的交点为()P u v ,则sin cos x v x u ==,.当x 在区间[)02π,上连续变化的时候,都有单位圆上点()P u v ,与之对应.相应地在坐标系xOy 中,描绘出点()Q x v ,和点()R x u ,.点Q 便勾画出正弦函数sin y x =一个周期的图像(见图6-1),点R便勾画出余弦函数cos y x =一个周期的图像(见图6-2).然后再利用函数的周期性将图像向左右延伸,便得到正弦函数和余弦函数的图像(见图6-3).图6-34.单调性当ππ22x ⎡⎤∈-⎢⎥⎣⎦,时,角x 的始边与单位圆的交点的纵坐标随x 的递增而递增,∴函数sin y x =在ππ22⎡⎤-⎢⎥⎣⎦,上单调增.当π3π22x ⎡⎤∈⎢⎥⎣⎦,时,角x 的始边与单位圆的交点的纵坐标随x 的递增而递减,∴函数sin y x =在π3π22⎡⎤⎢⎥⎣⎦,上单调减.同理可得,函数cos y x =在[]0π,上单调减,在[]π2π,上单调增.拓展:函数sin y x =在ππ2ππ2π22k k ⎡⎤-+⎢⎥⎣⎦,上单调增,在π3π2π2π22k k ⎡⎤++⎢⎥⎣⎦,上单调减,其中k ∈Z . 函数cos y x =在[]2π2ππk k +,上单调减,在[]2ππ2π2πk k ++,上单调增,其中k ∈Z . 说明:若()y f x =是定义在实数集R 上的周期函数,最小正周期是T ,[]a b ,是()y f x =的单调区间,则对任意整数k ,[]kT a kT b ++,均是()y f x =的单调区间. 5.最值回顾:函数sin y x =在ππ2π2π22k k ⎡⎤-+⎢⎥⎣⎦,上单调增,在π3π2π2π22k k ⎡⎤++⎢⎥⎣⎦,上单调减,其中k ∈Z . 函数cos y x =在[]2π2ππk k +,上单调减,在[]2ππ2π2πk k ++,上单调增,其中k ∈Z . 结论:当()π2π2x k k =+∈Z 时,函数sin y x =取最大值1; 当()π2π2x k k =-∈Z 时,函数sin y x =取最小值1-; 当()2πx k k =∈Z 时,函数cos y x =取最大值1; 当()2ππx k k =+∈Z 时,函数cos y x =取最小值1-.例1.求证:()sin f x x =是偶函数.证明:对x ∀∈R ,有()()()sin sin f x x x f x -=-==, ()sin f x x ∴=是偶函数.例2.研究函数()sin cos f x x x =+的奇偶性. 解:πππsin cos 0444f ⎛⎫⎛⎫⎛⎫-=-+-= ⎪ ⎪ ⎪⎝⎭⎝⎭⎝⎭, πππsin cos 444f ⎛⎫⎛⎫⎛⎫=+= ⎪ ⎪ ⎪⎝⎭⎝⎭⎝⎭()sin cos f x x x ∴=+既不是奇函数,也不是偶函数.另解:若()()f x f x -=,即()()sin cos sin cos x x x x -+-=+, 则sin 0x =,即πx k =,k ∈Z .若()()f x f x -=-,即()()sin cos sin cos x x x x -+-=--, 则cos 0x =,即ππ2x k =+,k ∈Z . ()sin cos f x x x ∴=+既不是奇函数,也不是偶函数.说明:对于()sin cos f x x x =+,虽然有无数多个实数x ,满足()()f x f x -=,但是()f x 并不是偶函数.同理()f x 也不是奇函数.函数的奇偶性是函数的整体性质.若()f x 是奇函数,则()()f x f x -=-对于定义域内的每一个x 恒成立; 若()f x 是偶函数,则()()f x f x -=对于定义域内的每一个x 恒成立.例3.已知A ωϕ、、都是常数,且0A >,ω>0,求证:函数()()sin f x A x ωϕ=+的最小正周期是2πω.解:对于任何实数x ,()2π2πsin sin 2πf x A x A x ωϕωϕωω⎡⎤⎛⎫⎛⎫+=++=++ ⎪ ⎪⎢⎥⎝⎭⎝⎭⎣⎦()()sin A x f x ωϕ=+=,2πω∴是函数()()sin f x A x ωϕ=+的周期.可以证明2πω是函数()()sin f x A x ωϕ=+的最小正周期.例4.作出函数sin cos y x x =+在[]02π,上的图像.解:πsin cos 4y x x x ⎛⎫=+=+ ⎪⎝⎭.描点作图,见图6-4.图6-4例5.求函数sin cos y x x =+的单调增区间. 解:πsin cos 4y x x x ⎛⎫=+=+ ⎪⎝⎭.πππ2π2π242k x k k -++∈Z ,≤≤,3ππ2π2π44k x k k ∴-+∈Z ,≤≤. ∴函数sin cos y x x =+的单调增区间是()3ππ2π2π44k k k ⎡⎤-+∈⎢⎥⎣⎦Z ,.例6.求函数π2cos 33y x ⎛⎫=- ⎪⎝⎭的单调减区间.解:π2π32ππ3k xk k -+∈Z ,≤≤,2ππ2π4π3939k k x k ∴++∈Z ,≤≤.∴函数π2cos 33y x ⎛⎫=- ⎪⎝⎭的单调减区间是()2ππ2π4π3939k k k ⎡⎤++∈⎢⎥⎣⎦Z ,.例7.求函数()sin cos 0y a x b x ab =+≠的最值. 解:()sin cos y a x b x x ϕ=++,其中tan baϕ=, max min y y ∴==.例8.求下列函数的最值: (1)2sin 2cos y x x =+;(2)()22sin cos y a x b x a b =+≠; (3)()()3sin 2105sin 270y x x =+︒++︒;(4)66sin cos y x x =+.解:(1)()2111sin 2cos sin 2cos22222y x x x x x ϕ=+=++=++,max y ∴min y =. (2)()222sin cos sin y a x b x a b x b =+=-+,∴若a b >,则2sin 1x =时,max y a =;2sin 0x =时,min y b =.若a b <,则2sin 0x =时,max y b =;2sin 1x =时,min y a =. {}max max y a b ∴=,,{}min min y a b =,.另解:221cos21cos2sin cos cos22222x x b a a by a x b x ab x -+-+=+=+=+, ∴若a b >,则cos21x =-时,max y a =;cos21x =时,min y b =.若a b <,则cos21x =时,max y b =;cos21x =-时,min y a =. {}max max y a b ∴=,,{}min min y a b =,.(3)()()3sin 2105sin 270y x x =+︒++︒3cos10sin23sin10cos25cos70sin25sin70cos2x x x x =︒+︒+︒+︒()()3cos105cos70sin 23sin105sin 70cos2x x =︒+︒+︒+︒ ()7sin 2x ϕ=+,其中3sin105sin 70tan 3cos105cos70ϕ︒+︒=︒+︒,max 7y ∴=,min 7y =-.(4)664224sin cos sin sin cos cos y x x x x x x =+=-+()2222223sin cos 3sin cos 1sin 24x x x x x =+-=-,max 1y ∴=,min 14y =. 说明:在求函数的最值过程中,始终要贯彻“统一名称统一角”的观点. 基础练习1.判断下列函数的奇偶性,并求最小正周期: (1)()sin sin 2f x x x =+; (2)()sin f x x x =; (3)()πsin πf x x =;(4)()2sin sin 2f x x x =+;(5)()ππcos cos 33f x x x ⎛⎫⎛⎫=++- ⎪ ⎪⎝⎭⎝⎭;(6)()22sin 2sin cos 3cos f x x x x x =++; (7)()66sin cos f x x x =+;(8)()()2222sin cos 0f x a x b x a b =++≠.2.用五点法分别作出下列各函数的图像,并说明这些函数的图像和sin y x =图像的区别.(1)2sin 1y x =-;(2)12sin 2y x =.3.观察正弦曲线和余弦曲线.写出满足下列条件的区间: (1)sin 0x >; (2)cos 0x <; (3)1sin 2x >; (4)cos x <. 4.求下列函数的单调区间:(1)πcos 27y x ⎛⎫=-- ⎪⎝⎭;(2)π2sin 34y x ⎛⎫=-- ⎪⎝⎭;(3)lg cos 13xy ⎛⎫= ⎪⎝⎭.5.求下列函数的最值,及取得相应最值的x 值.(1)π32sin 3y x ⎛⎫=-- ⎪⎝⎭; (2)23cos 4sin 2y x x =--;(3)22sin 3sin 1y x x =-+,π2π33x ⎡⎤∈⎢⎥⎣⎦,.6.确定函数131log 4y x ⎤⎛⎫=- ⎪⎥⎝⎭⎦的定义域、值域、单调区间、奇偶性、周期性.能力提高7.设π02αβγ⎛⎫∈ ⎪⎝⎭、、,,满足:()()cos cos sin sin cos ααββγγ===,,,则αβγ,,的大小关系为__________.8.求下列函数的周期: (1)sin3cos y x x =+;(2)1sin cos 1sin cos 1sin cos 1sin cos x x x xy x x x x+++-=++-++; (3)()2cos 325y x =-+.9.求5sin 2π2y x ⎛⎫=+ ⎪⎝⎭的图像的对称轴方程.10.(1)求函数()2sin sin f x a x x =-的最大值()g a ,并画出()g a 的图像.(2)若函数()2cos sin f x x a x b =-+的最大值为0,最小值为4-,实数0a >,求a b ,的值.6.2 正切函数的性质与图像定义:对于ππ2x x x k k ⎧⎫∀∈≠+∈⎨⎬⎩⎭Z ,都有唯一确定的值tan x 与之对应,按照此对应法则建立的函数tan y x =,叫做正切函数. 正切函数的性质:1.周期性ππ2x x x k k ⎧⎫∀∈≠+∈⎨⎬⎩⎭Z ,,有()tan πtan k x x k +=∈Z ,, tan t x ∴=是周期函数.可以证明函数tan y x =的最小正周期是π(见图6-5).图6-52.奇偶性ππ2x x x k k ⎧⎫∀∈≠+∈⎨⎬⎩⎭Z ,,有()tan tan x x -=-,tan y x ∴=是奇函数. 3.单调性12π02x x ⎡⎫∀∈⎪⎢⎣⎭、,,且12x x <,()121212sin tan tan cos cos x x x x x x --=12π02x x -<-<, ()12sin 0x x ∴-<. 1cos 0x >,2cos 0x >,()121212sin tan tan 0cos cos x x x x x x -∴-=>,即tan y x =在π0,2⎡⎫⎪⎢⎣⎭上单调增.tan y x =是奇函数, tan y x =在ππ22⎛⎫- ⎪⎝⎭,上单调增.tan y x =是周期为π的函数,∴函数tan y x =的单调增区间是()ππππ22k k k ⎛⎫-+∈ ⎪⎝⎭Z ,.4.值域函数tan y x =的值域是R .正切函数tan y x =在ππ22⎛⎫- ⎪⎝⎭,的图像如图6-6:图6-6利用正切函数的周期性,得到正切函数的图像. 例1.判断函数()tan 1lgtan 1x f x x +=-的奇偶性.解:函数的定义域应满足tan 10tan 1x x +>-,即tan 1x <-,或tan 1x >.于是定义域是()ππππππππ2442k k k k k ⎛⎫⎛⎫--++∈ ⎪ ⎪⎝⎭⎝⎭Z ,,,定义域是关于原点对称的. ()()()1tan 11tan 1tan lg lg lg tan 1tan 1tan 1x x x f x x x --+-+⎛⎫-=== ⎪-----⎝⎭()tan 1lgtan 1x f x x +=-=--.所以,tan 1lgtan 1x y x +=-是奇函数.例2.解不等式:tan21x -≤.解:在ππ22⎛⎫- ⎪⎝⎭,内,πtan 14⎛⎫-=- ⎪⎝⎭.∴不等式tan21x -≤的解集由不等式()πππ2π24k x k k -<-∈Z ≤确定,解得()ππππ22428k k x k -<-∈Z ≤, ∴不等式tan21x -≤的解集为ππππ22428k k x x k ⎧⎫-<-∈⎨⎬⎩⎭Z ,≤.基础练习 1.有人说:“正切函数在整个定义域内是单调递增的函数.”这句话对吗?为什么? 2.求下列函数的周期: (1)()()tan 0y ax b a =+≠; (2)tan cot y x x =-. 3.求函数11tan 2y x=+五的定义域.4.求函数22tan tan 1tan tan 1x x y x x -+=++的最大值、最小值,并求函数取得最大值或最小值时自变量x 的集合.5.求下列函数的最大值和最小值:(1)sin 2sin 3x y x -=-;(2)sin 2cos 3x y x -=-.能力提高6.求函数sin cos π0,sin cos 2x x y x x x ⎛⎫⎡⎤=∈ ⎪⎢⎥+⎣⎦⎝⎭的最值.7.根据条件比较下列各组数的大小: (1)已知ππ32θ<<,比较sin θ,cot θ,cos θ的大小; (2)已知π04θ<<,比较sin θ,()sin sin θ,()sin tan θ的大小; (3)已知π02θ<<,比较cos θ,()cos sin θ,()sin cos θ的大小. 6.3 函数()sin y A x d ωϕ=++的图像与性质例1.对下列函数与函数()sin y x x =∈R 进行比较研究(最好利用几何画板进行动态的研究): (1)()sin 01y A x x A A =∈>≠R ,,;(2)()sin 01y x x ωωω=∈>≠R ,,; (3)()()sin 0y x x ϕϕϕ=+∈∈≠R R ,,; (4)()sin 0y x d x d d =+∈∈≠R R ,,; (5)()()sin 01100y A x d x A A d d ωϕωωϕϕ=++∈>≠>0≠∈≠∈≠R R R ,,,,,,,,. 解:(1)函数sin y A x =与sin y x =都是奇函数,具有相同的周期和单调区间,但值域不同.当1A >时,函数sin y A x =的图像可以看成由函数sin y x =的图像纵向拉伸得到;当01A <<时,函数sin y A x =的图像可以看成由函数sin y x =的图像纵向压缩得到(见图6-7).图6-7(2)函数sin y x ω=与sin y x =都是奇函数,值域相同,但函数sin y x ω=与sin y x =的周期和单调区间都不同.当ω>1时,函数sin y x ω=的图像可以看成由函数sin y x =的图像横向压缩得到;当0ω<<1时.函数sin y x ω=的图像可以看成由函数sin y x =的图像横向拉伸得到(见图6-8).图6-8(3)当()πk k ϕ-+=∈Z Z 时,函数()sin y x ϕ=+是奇函数;当()ππ2k k ϕ=+∈Z ,函数()sin y x ϕ=+偶函数;函数()sin y x ϕ=+与sin y x =具有相同的周期和值域;当()2πk k ϕ-+=∈Z Z 时,函数()sin y x ϕ=+与sin y x =具有相同的单调区间.当ϕ>0时,函数()sin y x ϕ=+的图像可以看成由函数sin y x =的图像向左平移得到;当ϕ<0时,函数()sin y x ϕ=+的图像可以看成由函数sin y x =的图像向右平移得到(见图6-9).图6-9(4)函数sin y x d =+既不是奇函数,也不是偶函数;函数sin y x d =+与sin y x =具有相同的周期和单调区间,但值域不同.当0d >时,函数sin y x d =+的图像可以看成由函数sin y x =的图像向上平移得到;当0d <时,函数sin y x d =+的图像可以看成由函数sin y x =的图像向下平移得到(见图6-10).图6-10(5)函数()sin y A x d ωϕ=++的图像可以由函数sin y x =的图像经过一系列的变换得到.首先把函数sin y x =的图像进行纵向的变化,让函数sin y x =的图像上点的横坐标保持不变,让点的纵坐标变为原来的A 倍,得到函数sin y A x =的图像(见图6-11).图6-11其次把函数sin y A x =的图像进行横向的变化,让函数sin y A x =的图像七点的纵坐标保持不变,让点的横坐标变为原来的1ω倍,得到函数sin y A x ω=。

第6章形函数坐标变换和等参数单元6.1形函数在有限元方法中,形函数是用来近似表示未知场量的函数。
形函数的选择对求解结果有很大影响,因此形函数的选择是有一定规则和原则的。
6.1.1一维等参数线性单元形函数一维等参数线性单元的形函数为线性函数,形式为N(x) = a + bx,其中a和b是待定系数。
6.1.2二维等参数线性单元形函数二维等参数线性单元的形函数为平面上的线性函数,形式为N(x,y)= a + bx + cy,其中a、b和c是待定系数。
6.1.3三维等参数线性单元形函数三维等参数线性单元的形函数为空间中的线性函数,形式为N(x,y,z) = a + bx + cy + dz,其中a、b、c和d是待定系数。
6.2坐标变换在有限元方法中,常常需要进行坐标变换,将全局坐标系下的问题转化为局部坐标系下的问题。
坐标变换可以简化问题的计算。
6.2.1一维坐标变换一维坐标变换是将全局坐标系和局部坐标系之间进行转换,常用的一维坐标变换公式为x=x1+ξ(x2-x1),其中x1和x2是全局坐标系下的两个节点坐标,ξ是局部坐标。
6.2.2二维坐标变换二维坐标变换也是将全局坐标系和局部坐标系之间进行转换,常用的二维坐标变换公式为x=x1+ξ1(x2-x1)+ξ2(x3-x1),y=y1+ξ1(y2-y1)+ξ2(y3-y1),其中(x1,y1)、(x2,y2)和(x3,y3)是全局坐标系下的三个节点坐标,(ξ1,ξ2)是局部坐标。
等参数单元是指形函数和坐标变换相互独立,即形函数中的系数不随坐标变换改变。
等参数单元的优点是简化了计算,但缺点是对非线性问题的建模能力较差。
在等参数单元中,形函数和坐标变换可以一起表示为N(ξ1,ξ2,...,ξn)=∑(Ni*ξi),其中Ni是形函数的系数,ξi是坐标变换的系数。
总结:本章主要介绍了形函数、坐标变换和等参数单元。
形函数是用来近似表示未知场量的函数,根据单元的维度和性质可以选择不同的形函数。
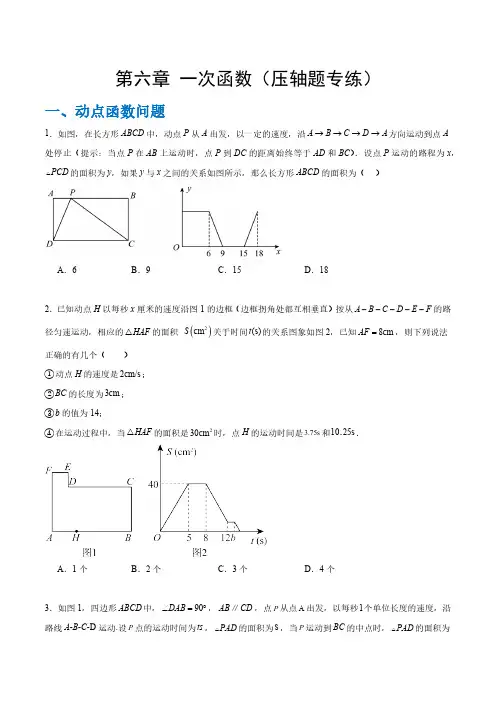
第六章 一次函数(压轴题专练)一、动点函数问题1.如图,在长方形ABCD 中,动点P 从A 出发,以一定的速度,沿A B C D A ®®®®方向运动到点A 处停止(提示:当点P 在AB 上运动时,点P 到DC 的距离始终等于AD 和BC ).设点P 运动的路程为x ,PCD V 的面积为y ,如果y 与x 之间的关系如图所示,那么长方形ABCD 的面积为( )A .6B .9C .15D .182.已知动点H 以每秒x 厘米的速度沿图1的边框(边框拐角处都互相垂直)按从A B C D E F -----的路径匀速运动,相应的HAF △的面积 ()2cm S 关于时间(s)t 的关系图象如图2,已知8cm AF =,则下列说法正确的有几个( )①动点H 的速度是2cm/s ;②BC 的长度为3cm ;③b 的值为14;④在运动过程中,当HAF △的面积是230cm 时,点H 的运动时间是3.75s 和1025s ..A .1个B .2个C .3个D .4个3.如图1,四边形ABCD 中,90DAB ∠=︒,AB CD ∥,点P 从点A 出发,以每秒1个单位长度的速度,沿路线A -B-C -D 运动.设P 点的运动时间为ts ,PAD V 的面积为S ,当P 运动到BC 的中点时,PAD V 的面积为A .7B .7.5C .84.如图,在长为形ABCD 中,5cm 16cm AB AD ==,,点3cm 4cm AM AE ==,,连线CE ,动点P 从点B 出发,以运动到点A 即停止运动,连接MP ,设点P 运动的时间为(1)如图1,线段CE = cm ;当10t =时,线段EP = cm ;(2)如图1,点P 在线段BC 上运动的过程中,连接EM EP ,,当EMP V 是以EM 为直角边的直角三角形时,请求出对应的时间的值;(1)求线段OC的长;(2)若点E是点C关于y轴的对称点,求(3)已知y轴上有一点P,若以点标.(1)求n和b的值;△是直角三角形,求点P的坐标;(2)若ACP∠=∠,求点P的坐标.(3)当PBE BAC(1)求点D的坐标;(2)点E是线段CD上一动点,直线BE与x轴交于点i)若BDFV的面积为8,求点F的坐标;ii)如图2,当点F在x轴正半轴上时,将直线接FM,若1OF MF=+,求线段MF的长.(1)求直线AB的解析式;(2)已知点D为直线BC上第三象限的一点,连接AD,设点D的横坐标为t 间的函数关系式(不要求写出变量t的取值范围);(3)在(2)的条件下,256S=,点D关于y轴的对称点为点E,点F在第一象限直线。

一、概念题1. C语言程序执行的开始处是。
2. C程序中的一个函数由两部分组成,即和。
3. 为了保证被调用函数不返回任何值,其函数定义的类型应为。
4. 若一个局部变量的存储类型是static,则该变量的值在时被释放。
5. 预处理命令#include的作用是。
6. 定义一个宏,功能是判断两个数是否相等,相等为1,不等为0。
#define EQU(a,b) 。
7. 变量的存储类别有、、、和共4种,它们分别用、、、标识。
8. 定义函数时,若缺省函数类型标识符,函数类型为。
9. 函数之间参数传递的方式有和。
10. 参数采用值传递调用方式时,若实参与形参不同类型,C的处理是:。
11. 调用时形参值的改变对实参变量有副作用的参数传递方式是。
12. 定义一个带参数的宏,若变量中的字符为大写字母,则转换为小写字母。
13. 定义一个带参数的宏,将两个参数值交换:#define swap(a, b) {double t;}。
二、判断题1. C程序的执行是从主函数开始的( )。
2. 函数的函数体可以是空语句()。
3. 只有main函数才能调用其他函数。
()4. return语句中表达式的类型必须与函数定义的类型一致。
()5. 函数的实参和形参可以是相同的名字。
()6. 函数调用中,形参与实参的类型和个数必须保持一致。
()7. 若定义的函数没有参数,则函数名后的圆括号可以省略。
()8. 在定义函数中指定的形参,在未出现函数调用时。
他们并不占用内存中的存储单元()。
9. 实际参数可以是常量、变量或表达式()。
10. 在C语言中,调用函数时,只能把实参的值传送给形参,形参的值不能传送给实参()。
11. C程序中有调用关系的所有函数必须放在同一个源程序文件中()。
12. C的所有函数都是平行的,函数既可以嵌套定义,也可以嵌套调用()。
13. 函数必须有返回值,否则不能使用函数()。
14. 外部类型的变量只能定义一次,但可在不同地方声明多次。
第六章 微分中值定理及其应用§1.拉格朗日中值定理和函数的单调性引言为了了解中值定理的背景,我们可作以下叙述:弧 AB 上有一点P ,该处的切线平行与弦AB .如何揭示出这一叙述中所包含的“数量”关系呢?联系“形”、“数”的莫过于“解析几何”,故如建立坐标系,则弧 AB 的函数是y=f(x),x ∈[a,b]的图像,点P 的横坐标为x ξ=.如点P 处有切线,则f(x)在点x ξ=处可导,且切线的斜率为()f ξ';另一方面,弦AB 所在的直线斜率为()()f b f a b a--,曲线y=f(x)上点P 的切线平行于弦AB ⇔()()()f b f a f b a ξ-'=-. 撇开上述几何背景,单单观察上述数量关系,可以发现:左边仅涉及函数的导数,右边仅涉及函数在端点的函数值.这样这个公式就把函数及其导数联系起来.在二者之间架起了一座桥梁,这座“桥”就是导数在研究函数方面应用的理论基础.鉴于(,)a b ξ∈,故把类似公式称为“中值公式”;把类似的定理称为中值定理.剩下的问题是:中值定理何时成立呢?观察如下事实,可以发现:如果y=f(x)在[a,b]上不连续或不可导(无切线),是不一定有上述结论的.换言之,如保证类似点P 存在,曲线弧 AB 至少是连续的,而且处处有切线.反映到函数y=f(x)上,即要求y=f(x)在[a,b]上连续,在(a,b)内可导.一、 罗尔中值定理与拉格朗日中值定理1、罗尔中值定理定理6.1:若f 满足如下条件:(1)f ∈[a ,b];(2)f 在(a ,b )内可导;(3)f (a)=f (b),则存在ξ∈(a ,b ),使得()0f ξ'=.(分析)由条件(1)知f 在[a ,b]上有最大值和最小值,再由条件(2)及(3),应用费马定理便可得到结论.证明:因为f 在[a,b ]上连续,所以有最大值与最小值,分别用M 与m 表示,现分两种情况讨论: (i)若M = m , 则 f 在[a,b ]上必为常数,从而结论显然成立.(ii)若m < M ,则因 f (a)=f (b),使得最大值M 与最小值m 至少有一个在(a,b)内某点ξ处取得,从而ξ是f 的极值点,由条件(2) f 在点ξ处可导,故由费马定理推知)(ξf '=0.Rolle 中值定理几何意义:在每一点都可导的连续曲线,如果曲线两端点高度相同,则至少存在一水平切线(在具有水平弦的可微曲线上有水平曲线).注:定理中的条件都是充分但非必要,即定理中三个条件缺一不可.1)不可导,不一定存在;2)不连续,不一定存在;3)f(a)≠f(b),不一定存在.“不一定存在”意味着一般情况如下:Rolle 定理不再成立.但仍可能有()0f ξ'=的情形发生. 例上在]1,1[,)(-=x x f ,],1,0[,2)(在x x f =⎩⎨⎧=<≤=1010)(x x x x f 在[0,1] 例1:设f 为R 上的可导函数,证明:若方程()0f x '=没有实根,则方程f(x)=0至多只有一个实根. 例2;已知10021n c c c n +++=+ ,证明:2012()0n n p x c c x c x c x =++++= 至少有一正实根. 2、Lagrange 中值定理定理6.2:若函数 ƒ满足如下条件:(1)ƒ在闭区间[b a ,]上连续;(2)ƒ在开区间(b a ,)内可导;则在(a ,b )内至少存在一点ξ,使得()()()f b f a f b aξ-'=-. (分析)罗尔定理是拉格朗日中值定理ƒ(a )=ƒ(b)时的特殊情况,应用罗尔定理证明此定理要构造辅助函数 )(x F ,使得)(x F 满足罗尔定理的条件(1)-(3) 且a b a f b f x f x F ---'=')()()()(, 从而推得],[),()()()()((x)b a x a x ab a f b f a f x f F ∈-----=.证明:作辅助函数 ),()()()()((x)a x ab a f b f a f x f F -----= 显然,F (a )=F(b)(=0),且F 在[a ,b]上满足罗尔定理的另两个条件,故存在点ξ∈(a ,b),使得0)()()()(=---'='a b a f b f f F ξξ 即 a b a f b f f --=')()()(ξ注1°罗尔定理是拉格朗日中值定理)()(b f a f =时的特例.注2°Lagrange 中值定理的几何意义:在满足拉格朗日中值定理条件的曲线)(x f y =上至少存在一点))(,(ξξf P ,该曲线在该点处的切线平行于曲线两端点的连线AB ,我们在证明中引入的辅助函数)(x F ,正是曲线 )(x f y = 与直线AB )()()()(a x ab a f b f a f y ---+= 之差,事实上,这个辅助函数的引入相当于坐标系统原点在平面内的旋转,使在新坐标系下,线段AB 平行于新х轴(F (a )=F (b )).注3°此定理的证明提供了一个用构造函数法证明数学命题的精彩典范;同时通过巧妙地数学变换,将一般化为特殊,将复杂问题化为简单问题的论证思想,也是数学分析的重要而常用的数学思维的体现.注4°拉格朗日中值定理的结论常称为拉格朗日公式,它有几种常用的等价形式,可根据不同问题的特点,在不同场合灵活采用:),(),)(()()(b a a b f a f b f ∈-'=-ξξ)1,0(),)](([)()(∈--+'=-θθa b a b a f a f b f)1,0(,)()()(∈+'=-+θθh h a f a f h a f注5°拉格朗日中值定理的两个条件彼此有关,并不彼此独立,因为:f 在(a,b )可导可以推出ƒ在(a ,b )连续,但反之不成立.把这两个条件的“重叠”部分去掉,改成“函数)(x f 在(a ,b )可导且)(x f 在a 右连续在b 左连续”这样,两个条件互相独立,但文字累赘且不便记忆,因此一般不这样叙述.例3 设f 在区间I 上可导,且)('x f 在I 上有界,证明f 在I 上满足Lipschitz 条件.例4 设0>h ,函数f 在],[h a h a +-上可导,证明存在)1,0(∈θ,使得)()()()(2)(''h a f h a f hh a f a f h a f θθ--+=-+-+ 例5:证明:对一切h>-1,h ≠0有公式ln(1)1h h h h<+<+ 3、拉格朗日中值定理的几个重要推论推论1 若函数f 在区间I 上可导,且()0f x '=,x I ∈,则f 为I 上的一个常量函数.几何意义:斜率处处为0的曲线一定是平行于x 轴的直线.推广:若f(x)在区间[a,b]上连续,且在(a,b )中除有限个点外有()0f x '=,则f 在I 上是常数函数. 推论2 若函数f 和g 均在I 上可导,且()()f x g x ''=,x I ∈,则在区间I 上f(x)与g(x)只差一个常数,即存在常数C ,使得()()f x g x C =+.例6 证明:(1)在[-1,1]上恒有:arcsin arccos 2x x π+=,(2)在(,)-∞+∞上恒有:arctan arc cot 2x x π+=4、导数极限定理 推论3设函数f 在点0x 的某邻域0()U x 内连续,在0()U x 内可导,且0lim ()x x f x →'存在,则f 在点0x 可导,且00()lim ()x x f x f x →''=. 例7 求函数⎩⎨⎧>+≤+=0)1ln(0sin )(2x x x x x x f 的导数.二、函数的单调性定理6.3 设f(x)在区间I 上可导,则f(x)在I 上递增(减)()0(0)f x '⇔≥≤.注 (1)这个定理的主要用途在于用它研究函数的单调性,确定单调区间.例8 设2332)(x x x f -=,试讨论函数f 的单调区间.定理6.4 若函数f 在(a,b)内可导,则f 在(a,b)内严格递增(减)的充要条件是:(ⅰ)对一切(,)x a b ∈,有()0(0)f x '≥≤;(ⅱ)在(a,b)内的任何子区间上()0f x '≠.推论 设函数f 在区间I 上可微,若()0(0)f x '><,则f 在I 上严格递增(减).注(2)从实现充分性的证明中发现,若21()0(0)()()f x f x f x '><⇒>21(()())f x f x <,即f 严格递增(减),从而有如下推论:注(3)上述推论是严格递增(减)的一个充分非必要条件.注(4)一个问题:f(x)在[a,b]上有定义,在(a,b)内严格递增(减),那么f(x)在[a,b]上是否一定严格递增(减)呢?答案:不一定.注: 若f(x)在(a,b)内可导,f(x)在(a,b)内严格递增(减),且y=f(x)在右端点a 右连续,则f 在[a,b]上变为严格递增(减),对左端点b 也有类似讨论.例9 证明不等式:)2,0(,2sin ππ∈>x x x 作业:P124 1, 4(1)(2), 5, 7。
公式号 6.1 图6-1第六章 单元形函数的讨论在有限单元法的基本理论中,形函数是一个十分重要的概念,它不仅可以用作单元的内插函数,把单元内任一点的位移用结点位移表示,而且可作为加权余量法中的加权函数,可以处理外载荷,将分布力等效为结点上的集中力和力矩,此外,它可用于后续的等参数单元的坐标变换等。
根据形函数的思想,首先将单元的位移场函数表示为多项式的形式,然后利用结点条件将多项式中的待定参数表示成场函数的结点值和单元几何参数的函数,从而将场函数表示成结点值插值形式的表达式。
在本节中,重点讨论几种典型单元的形函数插值函数的构造方式,它们具有一定的规律。
然后以平面三角形单元为例,讨论了形函数的性质,在此基础上分析了有限元的收敛准则。
6.1形函数构造的一般原理单元的类型和形状决定于结构总体求解域的几何特点、问题类型和求解精度。
根据单元形状,可分为一维、二维、三维单元。
单元插值形函数主要取决于单元的形状、结点类型和单元的结点数目。
结点的类型可以是只包含场函数的结点值,也可能还包含场函数导数的结点值。
是否需要场函数导数的结点值作为结点变量一般取决于单元边界上的连续性要求,如果边界上只要求函数值保持连续,称为C0型单元,若要求函数值及其一阶导数值都保持连续,则是C1型单元。
在有限元中,单元插值形函数均采用不同阶次的幂函数多项式形式。
对于C0型单元,单元内的未知场函数的线性变化仅用角(端)结点的参数来表示。
结点参数只包含场函数的结点值。
而对于C1型单元,结点参数中包含场函数及其一阶导数的结点值。
与此相对应,形函数可分为Lagrange 型(不需要函数在结点上的斜率或曲率)和Hermite 型(需要形函数在结点上的斜率或曲率)两大类,而形函数的幂次则是指所采用的多项式的幂次,可能具有一次、二次、三次、或更高次等。
另外,有限元形函数[N ]是坐标x 、y 、z 的函数,而结点位移不是x 、y 、z 的函数,因此静力学中的位移对坐标微分时,只对形函数[N ]作用,而在动力学中位移对时间t 微分时,只对结点位移向量作用。
(1)一维一次两结点单元图6.8 一维一次两结点单元模型设位移函数u (x )沿x 轴呈线性变化,即x a a x u 21)(+=(6.90)写成向量形式为[]⎭⎬⎫⎩⎨⎧=211)(a a x x u (6.91)设两个结点的坐标为j i x x ,;两结点的位移分别为j i u u ,,可以代入上式并解出21,a a ,得⎭⎬⎫⎩⎨⎧⎥⎦⎤⎢⎣⎡=⎭⎬⎫⎩⎨⎧-j i j i u u x x a a 12111(6.92)i xj x位移函数u (x )记作形函数与结点参数乘积的形式[]⎭⎬⎫⎩⎨⎧⎥⎦⎤⎢⎣⎡=-j i j i u u x x x x u 1111)( (6.93)得到形函数为[][][]⎥⎥⎦⎤⎢⎢⎣⎡----==--=⎥⎦⎤⎢⎣⎡=-ij i i j j j i i j ji j i x x x x x x x x N N x x x x x x x x x N 111111][1(6.94) 在自然坐标系内进行定义,则可得到形函数的标准化形式[]⎥⎦⎤⎢⎣⎡+-==2121][ξξj i N N N (6.95) 其中,自然坐标的变换公式为ξξ-=+==1,1,221L L L 。
图6.9一维一次两结点单元的局部坐标表达(2)二维一次三结点单元(平面三角形单元) 在总体坐标系统下,任一点的某一方向的位移是123(,)u x y a a x a y =++ (6.96)设三个结点的坐标是()()()k k j j i i y x y x y x ,,,,,,k j i u u u ,,为三个结点在某方向上的位移,具有如下关系[]⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧⇒⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧=-k j i k k j j i i u u u y x y x y x a a a a a a y x u 13213211111 (6.97)得到形函数矩阵如下式[]11111-⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=k k j j i i y x y x y x y x N (6.98)上述推导可用如下MATLAB 程序实现: clearv=sym('[1, x,y]')m=sym('[1,x1,y1;1,x2,y2;1,x3,y3]') mm=inv(m) N=v*mmsimplify(factor(N))(3)三维一次四结点单元(三维四面体单元) 在总体坐标系统下,任一点的某一方向的位移是z a y a x a a x u 4321)(+++= (6.99) 按相似的方法可以得到-=i x j[][]⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧=⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧=-e k j i e e e k k k j j j i i i e k j i u u u u z y x z y x z y x z y x z y x u u u u N a a a a z y x u 1432111111][1 (6.100) 形函数矩阵如下式[]11111-⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=k k j j i i y x y x y x y x N (6.101)(4)一维二次三结点单元(高次单元)图6.10一维二次三结点单元模型设位移函数为[]⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧=++=321223211a a a x x x a x a a u (6.102)用结点位移k j i u u u ,,代入并求解{}T a a a 321,⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧321222111a a a x x x x x x u u u k i k j j i k j i(6.103)得到[]()()()()()()()()()()()()⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧⎥⎥⎦⎤⎢⎢⎣⎡------------=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=-k j i j k i k j i k j i j k i k i j i k j k j i k j j i u u u x x x x x x x x x x x x x x x x x x x x x x x x u u u x x x x x x x x u k i 122221111 (6.104)上式等号右端第一项矩阵即为形函数。
(5ij k l图6.11 一维三次四结点单元模型位移函数为三次方程[]⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧=4321321a a a a x x x u (6.105)需要四个结点参数才能唯一地确定其中的常系数。
这四个结点可以分别取两个端点和两个三分点。
类似地,可以得到如下形函数方程ijk[]{}{}Φ=Φ=⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡=-],,,[][1111113232323232l k j i l k j i l l k k j j j i N N N N N u u u u x x x x x x x x x x x x x x x u l k i i (6.106) 其中形函数中的各元素为()()()()()()l i k i j i l k j i x x x x x x x x x x x x N ------=,()()()()()()l j k j i j l k i j x x x x x x x x x x x x N ------=,()()()()()()l k j k i k l j i k x x x x x x x x x x x x N ------=,()()()()()()k l j l i l k j i l x x x x x x x x x x x x N ------=. (6.107)(6这类单元的位移函数为[]⎪⎪⎭⎪⎪⎬⎪⎪⎩⎪⎪⎨=4321321a a a x x x u (6.108)对应的转角方程为[]⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧==432123210a a a a x x dx du θ (6.109) 用结点参数{}{}T j i j i u u θθφ=代入求解{}4321a a a a ,即⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧⇒⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧-j i j i j j i i j j j i j j i i j j j i j i j i u u x x x x x x x x x x a a a a a a a a x x x x x x x x x x u u i i i i θθθθ12232324321432122323232103210113210321011 (6.110) 得到[]⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=-j i j i j j i i j j j i u u x x x x x x x x x x x x x u iiθθ1223232323213210111{}{}Φ=Φ===][][j i uj ui N N N N N θθ (6.111) 其中形函数矩阵中各元素为()()()3232jij i j ui x x x x x x x N -+---=,()()()3232jii j i uj x x x x x x x N -+--=()()()2jij i i x x x x x x N ---=θ,()()()2jij i j x x x x x x N ---=θ (6.112)上述结果可用MATLAB 程序进行验证: clearx=sym('x'); j=0:3;v=x.^j % v=[1 x x^2 x^3];m=sym('[1,x1,x1^2,x1^3;1,x2,x2^2,x2^3;0,1,2*x1,3*x1^2;0,1,2*x2,3*x2^2]') mm=inv(m) N=v*mm;simplify(factor(N))(7)二维一次四结点单元(平面四边形单元或矩形单元) 用形函数表达的位移方程如下[][][]{}Φ=⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧=-l k j i l k j i l l l l k k kk j j jj i i i i N N N N u u u u y x y x y x y x y x y x y x y x xy y x a a a a xy y x u 14321111111 (6.113) 其中形函数矩阵的元素为))(())((212122y y x x y y x x N i ----=,i =1,2,3,4 (6.114)对于平面四边形单元和矩形单元,可用局部坐标系统很好地加以解释。