5现代控制理论 主汽温对象模型
- 格式:doc
- 大小:134.50 KB
- 文档页数:5
考研现代控制理论知识点剖析现代控制理论作为控制工程的重要分支,是在传统控制理论的基础上发展起来的。
它以数学模型为基础,利用系统分析和设计方法,实现对各类复杂系统的控制与优化。
本文将从控制系统的基本概念、控制器设计、状态空间分析等方面,对考研现代控制理论的核心知识点进行剖析。
一、控制系统的基本概念控制系统是指通过对被控对象进行操作,使其输出符合预期要求的系统。
它由被控对象、传感器、执行器和控制器四个基本部分构成。
被控对象是指需要进行控制的物理系统,如机械系统、电气系统等。
传感器用于对被控对象的各种状态或性能进行测量与检测,并将其转化为电信号。
执行器则根据控制器输出的信号,将其转化为能够直接或间接影响被控对象的物理量或信号。
控制器是整个控制系统的核心部分,它接收传感器的反馈信号,并根据预先设定的控制策略产生相应的控制信号。
二、控制器设计控制器设计是指通过对控制器参数的选择和调节,使得控制系统能够达到预期的控制目标。
常见的控制器设计方法主要有比例控制、积分控制、微分控制以及PID控制等。
比例控制是根据被控对象输出与期望输出之间的差异,按比例调节控制器输出信号。
积分控制在比例控制的基础上,增加对积分项的调节,使系统具有更好的稳定性和鲁棒性。
微分控制则通过对被控对象输出的变化率进行反馈调节,进一步提高系统响应速度和抗扰性。
PID控制则是综合了比例、积分和微分控制的优点,具有更广泛的应用范围和更好的控制性能。
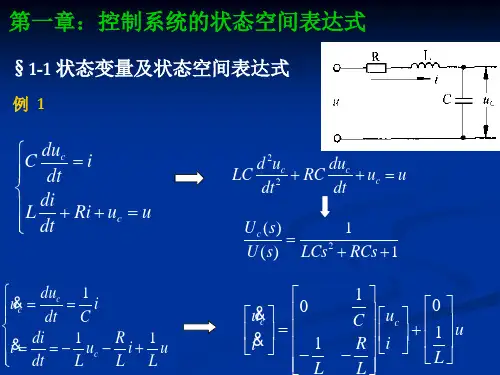
三、状态空间分析状态空间分析是现代控制理论中的重要内容,它基于被控对象的状态变量,利用状态方程和输出方程描述系统的动态行为和输出特性。
状态方程是由被控对象的状态变量和外部输入所构成的一组常微分方程。
输出方程则将被控对象的状态变量与输出变量之间的关系表示出来。
通过状态空间分析,可以对系统的稳定性、可控性和可观测性等性质进行评估,并为控制器设计提供依据。
四、鲁棒控制鲁棒控制是现代控制理论中的另一个重要概念,它是指在系统参数变化或外部扰动存在的情况下,保持控制系统性能的一种控制策略。

现代控制理论_哈尔滨工程大学中国大学mooc课后章节答案期末考试题库2023年1.已知线性定常系统如下所示,下面说法错误的是()【图片】参考答案:引入状态反馈后,不改变系统的能观测性。
2.串联组合系统的传递函数矩阵为各串联子系统的传递函数矩阵之和。
参考答案:错误3.在最优控制问题中,如果系统的性能指标是状态变量和控制变量的二次型函数,则称为线性二次型最优控制问题,简称LQ(Linear Quadratic)问题。
参考答案:错误4.用不大的控制能量,使系统输出尽可能保持在零值附近,这类问题称为输出调节器问题。
参考答案:正确5.研究系统控制的一个首要前提是建立系统的数学模型,线性系统的数学模型主要有两种形式,即时间域模型和频率域模型。
参考答案:正确6.现代控制理论以多变量线性系统和非线性系统作为研究对象,以时域法,特别是状态空间方法作为主要的研究方法。
参考答案:正确7.1892年俄国数学家李亚普诺夫发表了论文《运动稳定性的一般问题》,用严格的数学分析方法全面地论述了稳定性问题。
参考答案:正确8.经典控制理论以单变量线性定常系统作为主要的研究对象,以时域法作为研究控制系统动态特性的主要方法。
参考答案:错误9.下述描述中哪些作为现代控制理论形成的标志()参考答案:用于系统的整个描述、分析和设计过程的状态空间方法._最优控制中的Pontriagin极大值原理和Bellman动态规划。
_随机系统理论中的Kalman 滤波技术。
10.内部稳定性表现为系统的零初态响应,即在初始状态恒为零时,系统的状态演变的趋势。
参考答案:错误11.系统矩阵A所有特征值均具有负实部是线性时不变系统渐近稳定的充要条件。
参考答案:正确12.从物理直观性看,能观测性研究系统内部状态“是否可由输入影响的问题”。
参考答案:错误13.由系统结构的规范分解所揭示,传递函数矩阵一般而言只是对系统结构的不完全描述,只能反映系统中的能控能观测部分.参考答案:正确14.下面论述正确的是()参考答案:李亚普诺夫意义下渐近稳定等同于工程意义下稳定。
现代控制理论的发展概况传统的控制理论是在20世纪30到40年代,奈奎斯特、伯德、维纳等人的著作为自动控制理论的初步形成而奠定了基础的。
而由于航空航天技术的推动和计算机技术飞速发展,控制理论在1960年前后有了重大的突破和创新。
在此期间,由卡尔曼提出的线性控制系统的状态空间法、能控性和能观测性的概念,奠定了现代控制理论的基础,其提出的卡尔曼滤波,在随机控制系统的分析与控制中得到广泛应用;庞特里亚金等人提出了极大值原理,深入研究了最优控制问题;由贝而曼提出最优控制的动态规划法,广泛用于各类最优控制问题。
这些就构成了后来被称为现代控制理论的发展起点和基础。
罗森布洛克、麦克法轮和欧文斯研究了使用于计算机辅助控制系统设计的现代频域法理论,将经典控制理论传递函数的概念推广到多变量系统,并探讨了传递函数矩阵与状态方程之间的等价转换关系,为进一步建立统一的线性系统理论奠定了基础。
20世纪70年代奥斯特隆姆和朗道在自适应控制理论和应用方面作出了贡献。
与此同时,关于系统辨识、最优控制、离散时间系统和自适应控制的发展大大丰富了现代控制理论的内容。
鲁棒控制理论阶段:由于现代数学的发展,结合着H2和H¥等范数而出现了H2和H ¥控制,还有逆系统控制等方法。
20世纪70年代末,控制理论向着“大系统理论”、“智能控制理论”和“复杂系统理论”的方向发展。
“大系统理论”:用控制和信息的观点,研究各种大系统的结构方案、总体设计中的分解方法和协调等问题的技术基础理论。
“智能控制理论”:研究与模拟人类智能活动及其控制与信息传递过程的规律,研制具有某些拟人智能的工程控制与信息处理系统的理论。
“复杂系统理论”:把系统的研究拓广到开放复杂巨系统的范筹,以解决复杂系统的控制为目标。
而“现代控制理论”这一名称是1960年卡尔曼的著名文章发表后出现的,其在经典控制理论的基础上,以线性代数和微分方程为主要的数学工具,以状态空间法为基础,分析与设计控制系统。
(完整版)现代控制理论第⼀章线性离散系统第⼀节概述随着微电⼦技术,计算机技术和⽹络技术的发展,采样系统和数字控制系统得到⼴泛的应⽤。
通常把采样系统,数字控制系统统称为离散系统。
⼀、举例⾃动测温,控温系统图;加热⽓体图解:1. 当炉温h变化时,测温电阻R变化→R,电桥失去平衡状态,检流计指针发⽣偏转,其偏转⾓度为)e;(t2. 检流计是个⾼灵敏度的元件,为防磨损不允许有摩擦⼒。
当凸轮转动使指针),接触时间为τ秒;与电位器相接触(凸轮每转的时间为T样偏差)(t e 是连续信号,电位器的输出的e *τ(t)是脉冲信号。
连续信号转变为脉冲信号的过程,成为采样或采样过程。
实现采样的装置成为采样器。
To —采样周期,f s =--To1采样频率,W s =2πf s —采样⾓频率 2.信号复现因接触时间很⼩,τo T ??τ,故可把采样器的输出信号)(t e *近似看成是⼀串强度等于矩形脉冲⾯积的理想脉冲,为了去除采样本⾝带来的⾼额分量,需要把离散信号)(t e *恢复到原信号)(t e 。
实现⽅法:是在采样器之后串联⼀个保持器,及信号复现滤波器。
作⽤:是把)(t e *脉冲信号变成阶梯信号e h (t)3.采样系统结构图r(t),e(t),c(t),y(t)为连续信号,)(t e *为离散信号)(s G h ,)(s G p ,)(s H 分别为保持器,被控对象和反馈环节的传递函数。
(t)r4.采样系统⼯作过程由保持器5. 采样控制⽅式采样周期To ??=≠=?相位不同步采样常数常数6. 采样系统的研究⽅法(或称使⽤的数字⼯具)因运算过程中出现s 的超越函数,故不⽤拉式变换法,⼆采⽤z 变换⽅法,状态空间法。
第⼆节信号的采样和复现第⼀节是定性认识与分析,本节是定量研究。
⼀、采样过程从第3个图形可知,采样器输出信号)(t e *是⼀串理想的脉冲信号,k 瞬时)(t e *的脉冲强度等于此时)(T e 的幅值)(0kT e ,即)0(0T e ,)(0T e ,)2(0T e …. )(0nT e ….采样过程可以看成为⼀个幅值调制过程,采样器如同⼀个幅值调制器。
1火电厂主汽温研究背景及意义火电厂锅炉主汽温控制决定着机组生产的经济性和安全性。
由于锅炉的蒸汽容量非常大、过热汽管道很长,主汽温调节对象往往具有大惯性和大延迟,导致锅炉主汽温控制存在很多方面的问题,影响机组的整个工作效率。
主汽温系统是表征锅炉特性的重要指标之一,主汽温的稳定对于机组的安全运行至关重要。
其重要性主要表现在以下几个方面:(1) 汽温过高会加速锅炉受热面以及蒸汽管道金属的蠕变,缩短其使用寿命。
例如,12CrMoV 钢在585℃环境下可保证其应用强度的时间约为10万小时,而在 595℃时,其保证应用强度的时间可能仅仅是 3 万小时。
而且一旦受热面严重超温,管道材料的强度将会急剧下降,最终可能会导致爆管。
再者,汽温过高也会严重影响汽轮机的汽缸、汽门、前几级喷嘴和叶片、高压缸前轴承等部件的机械强度,从而导致设备损坏或者使用年限缩短。
(2) 汽温过低,会使得机组循环热效率降低,增大煤耗。
根据理论估计可知:过热汽温每降低10℃,会使得煤耗平均增加0.2%。
同时,汽温降低还会造成汽轮机尾部的蒸汽湿度增大,其后果是,不仅汽轮机内部热效率降低,而且会加速汽轮机末几级叶片的侵蚀。
此外,汽温过低会增大汽轮机所受的轴向推力,不利于汽轮机的安全运行。
(3) 汽温变化过大会使得管材及有关部件产生疲劳,此外还将引起汽轮机汽缸的转子与汽缸的胀差变化,甚至产生剧烈振动,危及机组安全运行。
据以上所述,工艺上对汽温控制系统的质量要求非常严格,一般控制误差范围在±5℃。
主汽温太高会缩短管道的使用寿命,太低又会降低机组效率。
所以必须实现汽温系统的良好控制。
而汽温被控对象往往具有大惯性、大延时、非线性,时变一系列的特性,造成对象的复杂性,增加了控制的难度。
现代控制系统中有很多关于主汽温的控制方案,本文我们着重研究带状态观测器的状态反馈控制对主汽温的控制[1]。
2主汽温对象的特性2.1主汽温对象的静态特性主汽温被控对象的静态特性是指汽温随锅炉负荷变化的静态关系。
主汽温导前微分控制系统的仿真研究摘要对于大惯性和大延迟的热工对象,常规PID控制往往不能取得令人满意的效果,尤其是火电厂再热汽温这种大滞后、大惯性以及动态特性随工况参数变化的汽温被控对象,主汽温的控制成为研究大型火力发电机组不可缺少的一个项目。
锅炉过热蒸汽温度是影响锅炉生产过程安全性和经济性的重要锅炉过热蒸汽温度是影响锅炉生产过程安全性和经济性的重要参数,现代锅炉的过热器是在高温、高压的条件下工作。
必须通过自动化手段加以控制,维持其出口蒸汽温度在生产允许的范围内。
因此,需要采用适当的减温方式改变过热器入口的蒸汽温度。
从而控制出口的过热蒸汽温度。
目前大多数机组都采用二级喷水减温控制方式。
本文介绍了利用MATLAB在火电厂单元机组过热蒸汽温度导前微分控制系统中参数整定和抗扰性能分析中的应用。
它具有安全、可靠等优点,为加快大型火电厂汽温自动控制系统的反应速度、提高火电厂的自动投运提供了一个很好的方法。
关键词:过热蒸汽温度;MATLAB;参数整定;抗扰性能Simulation Study of Superheated Steam Temperature Guidance Differential Control System in Power PlantAbstractLarge delay and strong inertia for thermal object, conventional PID control often can not obtain satisfactory results, especially the thermal power plant main steam temperature of this large delay, strong inertia and dynamic changes with the working parameters of steam temperature controlled object,and the steam temperature control of large thermal power generating units to become an indispensable item.Boiler superheat steam temperature is an important parameter which influences boiler produce process safety and economic value. Sophisticated boiler super heater working on condition that high temperature and high pressure must be controlled by automatic methods, and keep the outlet steam temperature in the range of produce permitting. For this reason, we should use suitable desuperheat methods to alter the inlet steam temperature of superheater, so that control the outlet temperature of superheater. At the moment, most unit sets use Ⅱjet desuperheat control.This paper presents a simulation study of a superheated steam temperature control system in thermal power plants.The tuning of the regulaters and the disturbance reduction performance are discussed in detail.Key Words:surperheated steam temperature;MATLAB;tuning of parameters; disturbance reduction目录摘要 --------------------------------------------------------------------- I Abstract ---------------------------------------------------------------- II 1 前言 (1)1.1 主汽温控制系统研究的背景及意义 (1)1.2大型火电机组典型的主汽温控制方案 (1)1.3 本文的主要工作 (2)2 PID控制器的设计原理及原则 (3)2.1三种基本调节作用的特点 (3)2.1.1比例控制(简称P作用) (3)2.1.2 积分控制(简称I作用) (3)2.1.3 微分控制(简称D作用) (4)2.2 自动调节器典型动态特性 (5)2.2.1 比例(P)调节器 (5)2.2.2 比例积分(PI)调节器 (6)2.2.3 比例微分(PD)调节器 (7)2.2.4 比例积分微分(PID)调节器 (9)3 过热汽温控制概述 (11)3.1 火力发电厂的生产流程 (11)3.2 过热汽温控制的任务 (11)3.3 过热汽温控制的难点分析 (12)3.4 影响主蒸汽温度的因素 (12)3.5 过热汽温被控对象的动态特性 (13)3.5.1蒸汽流量(负荷)扰动下过热汽温对象的动态特性 (13)3.5.2 烟气侧扰动下过热汽温的动态特性 (13)3.5.3工质侧扰动下的过热汽温动态特性 (15)4 过热汽温控制系统的典型方案 (17)4.1 汽温串级控制系统及其分析整定 (17)4.1.1汽温串级控制系统原理 (17)4.1.2 汽温串级控制系统的内回路的分析整定 (18)4.1.3 汽温串级控制系统的主回路的分析整定 (19)4.2 汽温串级控制系统的工程整定方法及仿真 (20)4.2.1 串级控制系统的工程方法 (20)4.2.2 串级控制系统的PID整定 (21)4.3 导前汽温微分信号的过热汽温自动控制系统 (21)4.3.1导前微分控制系统的组成 (22)4.3.2 导前微分控制系统的分析 (22)4.4 导前微分控制系统的参数整定及仿真实验 (22)4.4.1导前微分环节的参数整定 (22)4.4.2调节器参数整定 (24)4.5 系统的抗干扰性及鲁棒性分析、仿真 (24)4.5.1 抗内扰分析 (24)4.5.2 抗外扰分析 (24)4.5.3 鲁棒性分析 (25)5 总结 (26)参考文献 (27)致谢 (28)1 前言1.1 主汽温控制系统研究的背景及意义随着我国国民经济的迅猛发展,我国电力装机容量以每年7%-8%的速率递增,其中火电燃煤机组占有很大比重。
1火电厂主汽温研究背景及意义
火电厂锅炉主汽温控制决定着机组生产的经济性和安全性。
由于锅炉的蒸汽容量非常大、过热汽管道很长,主汽温调节对象往往具有大惯性和大延迟,导致锅炉主汽温控制存在很多方面的问题,影响机组的整个工作效率。
主汽温系统是表征锅炉特性的重要指标之一,主汽温的稳定对于机组的安全运行至关重要。
其重要性主要表现在以下几个方面:
(1) 汽温过高会加速锅炉受热面以及蒸汽管道金属的蠕变,缩短其使用寿命。
例如,12CrMoV 钢在585℃环境下可保证其应用强度的时间约为10万小时,而在 595℃时,其保证应用强度的时间可能仅仅是 3 万小时。
而且一旦受热面严重超温,管道材料的强度将会急剧下降,最终可能会导致爆管。
再者,汽温过高也会严重影响汽轮机的汽缸、汽门、前几级喷嘴和叶片、高压缸前轴承等部件的机械强度,从而导致设备损坏或者使用年限缩短。
(2) 汽温过低,会使得机组循环热效率降低,增大煤耗。
根据理论估计可知:过热汽温每降低10℃,会使得煤耗平均增加0.2%。
同时,汽温降低还会造成汽轮机尾部的蒸汽湿度增大,其后果是,不仅汽轮机内部热效率降低,而且会加速汽轮机末几级叶片的侵蚀。
此外,汽温过低会增大汽轮机所受的轴向推力,不利于汽轮机的安全运行。
(3) 汽温变化过大会使得管材及有关部件产生疲劳,此外还将引起汽轮机汽缸的转子与汽缸的胀差变化,甚至产生剧烈振动,危及机组安全运行。
据以上所述,工艺上对汽温控制系统的质量要求非常严格,一般控制误差范围在±5℃。
主汽温太高会缩短管道的使用寿命,太低又会降低机组效率。
所以必须实现汽温系统的良好控制。
而汽温被控对象往往具有大惯性、大延时、非线性,时变一系列的特性,造成对象的复杂性,增加了控制的难度。
现代控制系统中有很多关于主汽温的控制方案,本文我们着重研究带状态观测器的状态反馈控制对主汽温的控制[1]。
2主汽温对象的特性
2.1主汽温对象的静态特性
主汽温被控对象的静态特性是指汽温随锅炉负荷变化的静态关系。
过热器的传热形式、结构和布置将直接影响过热器的静态特性。
现代大容量锅炉多采用对流过热器、辐射过热器和屏式过热器。
对流过热器布置在450℃~1000℃烟气温度的烟道中,受烟气的横向和纵向冲刷,烟气以对流方式将热量传给管道。
而辐射过热器则是直接吸收火焰和高温烟气的辐射能。
屏式过热器布置在炉膛内上部
或出口处,属于辐射或半辐射过热器。
对于辐射过热器,当锅炉负荷增加时,必须增加燃料量和风量。
随着炉膛温度的提高,辐射传热量也将增加。
但炉膛温度提高得并不多,而蒸汽量与燃料量是成正比的,这样就造成辐射传热量的增加赶不上蒸发量的增加。
再者来说,当负荷增加时,强化燃烧后炉膛出口烟气温度将升高,这表明每公斤燃料产生的烟气带出炉膛的热量增多,这也说明了炉膛辐射吸热量的相对减少。
所以,辐射受热面的汽温是随着锅炉负荷的增加而降低的。
对于对流式受热面,当锅炉负荷增加和燃料消耗量增大时,流过对流受热面的烟气流速也增加,从而使对流的放热系数增大。
另外,因为炉膛出口烟温升高,即进入对流受热面的吸热量增加值,超过了流过对流受热面的蒸汽流量的增加值。
所以,对流受热面的汽温是随锅炉负荷的增加而升高的。
2.2 主汽温对象的动态特性[3]
2.2.1蒸汽流量扰动下主汽温的动态特性
在蒸汽流量D产生阶跃扰动时,主汽温 变化的响应曲线如图2-2-1所示:
图2-2-1 蒸汽流量扰动下主汽温响应曲线
蒸汽流量D扰动下,主汽温调节对象动态特性的特点是: 有延迟、有惯性、有自衡能力。
当锅炉负荷增加时,通过对流式过热器的烟气温度和流速都增加,因此对流式过热器出口汽温升高;但对于辐射式过热器,炉膛内烟温升高增加的辐射传热量小于蒸汽流量增加所需的吸热量,因此辐射式过热器出口汽温下降。
2.2.2烟气热量扰动下汽温的动态特性
在烟气热量
Q产生阶跃扰动下,汽温θ变化的响应曲线如图2-2-2所示:
y
图2-2-2 烟气热量扰动下汽温响应曲线
烟气热量
Q扰动下,汽温调节对象动态特性的特点是:有迟延、有惯性、有y
自平能力。
由于烟气热量变化时,沿过热器长度使烟气和过热蒸汽之间的传热量同时变化,因此,汽温θ反应较快,其时间常数Tc和迟延时间τ均较小。
2.2.3减温水量扰动下汽温的动态特性
W扰动下,汽温调节对象动态特性的特点是: 有迟延、有惯性、减温水量
B
W变化时汽温有自衡能力。
由于现代大型锅炉过热器管路很长,因此减温水量
B
θ反应较慢,其时间常数Tc和迟延时间τ均较大。
W产生阶跃扰动下,汽温θ变化的响应曲线如图2-2-3所示:在减温水量
B
图2-2-3 减温水量扰动下汽温响应曲线
3主汽温对象的数学模型
3.1主汽温对象模型的建立
分析和设计自动控制系统的一个首要任务是建立系统的数学模型,因为不论要了解的是简单系统的特性还是复杂系统的特性,都必须掌握系统中各变量之间的相互动态关系。
尽管,电厂汽温控制系统的动态特性复杂,具有多变量、非线性和分布复杂的特点,难以建立精确的数学模型,但是运用多种知识,建立能相
对反映汽温控制系统动态性能的数学模型,还是对研究相应的自动控制方法大有益处。
锅炉过热器是由辐射过热器、对流过热器和减温器等组成,其任务是将从汽包出来的饱和蒸汽加热到一定的数值,然后送往汽轮机去做功。
通常称减温器前的过热器为前级过热器,减温器后的过热器为后级过热器。
图2-3-1 过热蒸汽喷水减温系统示意图
过热器布置在高温烟道中,大型锅炉的过热器往往分为若干段,在各段之间设置喷水减温器,即采用汽温的分段控制,温度调节用减温水由锅炉的给水系统提供。
其示意图如图2-3-1。
图中,θs 为过热器出口蒸汽温度,它是控制系统的被调量;Ws1、Ws2是减温器的喷水量,它是控制系统的调节量。
3.2主汽温对象的模型
目前电厂中广泛使用的汽温调节系统主要是基于常规控制器构成的串级控制系统。
因为常规PID 控制器的参数是根据被控对象的数学模型来整定的。
而汽温调节对象的动态特性随机组负荷的变化而有较大变化,因此,当机组负荷变化时,该控制系统的工作点建立多固定模型,设计相应的控制器,在运行过程中根据系统工况变化选择相应的控制器输出以获得满意的控制效果,通过控制器在不同工况下的切换使系统达到全局稳定性的要求。
某机组导前区模型:11() 1.1()()121
y s G s y s s ==+, 惰性区模型:122() 2.8()()(301)
y s G s u s s ==+, 总体模型:2
() 1.1 2.8()()(121)30s+1)y s G s u s s ⨯==+(。
对应的一种状态空间模型为
1/301/30000
1/301/3000
01/12 1.1*2.8/12x x u -⎡⎤⎡⎤
⎢⎥⎢⎥=-+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦ []y x =100。