传感器的标定
- 格式:doc
- 大小:203.50 KB
- 文档页数:4
传感器的标定方法传感器标定是指通过一系列实验和技术手段,对传感器进行参数的测量和调整,以确保传感器输出与被测量的物理量之间的准确关系。
传感器标定方法多种多样,根据不同的传感器类型和应用领域有所差异。
下面将介绍一些常见的传感器标定方法。
1. 建模法标定:建模法是一种常用的传感器标定方法,它通过将传感器的输入和输出建立数学模型,通过实验测量和数据拟合得到模型的参数,从而实现传感器的标定。
常用的建模方法有线性回归、多项式拟合、神经网络等。
例如,在温度传感器中,可以通过将温度传感器输入的电压信号与温度之间建立线性或非线性关系的模型进行标定。
2. 标准物质法标定:标准物质法是一种传感器标定的重要方法,它通过使用已知浓度的标准物质来对传感器进行标定。
例如,气体传感器可以使用标准气体品,电导传感器可以使用标准电解液,光学传感器可以使用标准光源等。
通过将传感器输出与标准物质的浓度进行比较,可以计算传感器的灵敏度、零点漂移等参数。
3. 对比法标定:对比法是一种通过将待标定传感器与已标定的传感器进行比较来进行标定的方法。
例如,压力传感器可以使用静水压力来进行对比标定,通过将待标定传感器与已标定传感器同时暴露在相同的静水压力下,比较两者的输出信号差异,可以得到待标定传感器的准确度。
4. 自标定法标定:自标定法是一种能够实时对传感器进行标定的方法,它利用传感器本身的特性和内部结构来实现标定。
例如,加速度传感器可以通过自标定法来校准,它通过检测传感器在不同加速度条件下的输出信号,得到传感器的灵敏度和零点偏移,并进行自动校正。
5. 外部参考法标定:外部参考法是一种使用外部参考量对传感器进行标定的方法。
例如,使用GPS 定位系统对地磁传感器进行标定,通过将传感器所在位置的真实地磁场与传感器输出信号进行比较,可以得到传感器的准确度和校准系数。
总之,传感器标定是确保传感器输出与被测量物理量之间准确关系的重要步骤。
在进行传感器标定时,需要选择合适的标定方法,并根据具体需求和应用场景进行操作。
标定与校准的概念新研制或生产的传感器需要对其技术性能进行全面的检定,以确定其基本的静、动态特性,包括灵敏度、重复性、非线性、迟滞、精度及固有频率等。
例如,对于一个压电式压力传感器,在受力后将输出电荷信号,即压力信号经传感器转换为电荷信号。
但是,究竟多大压力能使传感器产生多少电荷呢?换句话说,我们测出了一定大小的电荷信号,但它所表示的加在传感器上的压力是多大呢?这个问题只靠传感器本身是无法确定的,必须依靠专用的标准设备来确定传感器的输入――输出转换关系,这个过程就称为标定。
简单地说,利用标准器具对传感器进行标度的过程称为标定.具体到压电式压力传感器来说,我们用专用的标定设备,如活塞式压力计,产生一个大小已知的标准力,作用在传感器上,传感器将输出一个相应的电荷信号,这时,再用精度已知的标准检测设备测量这个电荷信号,得到电荷信号的大小,由此得到一组输入――输出关系,这样的一系列过程就是对压电式压力传感器的标定过程,如图1-19所示。
图1—19 压电式压力传感器输入――输出关系校准在某种程度上说也是一种标定,它是指传感器在经过一段时间储存或使用后,需要对其进行复测,以检测传感器的基本性能是否发生变化,判断它是否可以继续使用。
因此,校准是指传感器在使用中或存储后进行的性能复测。
在校准过程中,传感器的某些指标发生了变化,应对其进行修正.标定与校准在本质上是相同的,校准实际上就是再次的标定,因此,下面都以标定为例作介绍。
1.7.2 标定的基本方法标定的基本方法是,利用标准设备产生已知的非电量(如标准力、位移、压力等),作为输入量输入到待标定的传感器,然后将得到的传感器的输出量与输入的标准量作比较,从而得到一系列的标定数据或曲线.例如,上述的压电式压力传感器,利用标准设备产生已知大小的标准压力,输入传感器后,得到相应的输出信号,这样就可以得到其标定曲线,根据标定曲线确定拟合直线,可作为测量的依据,如图1-20所示.有时,输入的标准量是由标准传感器检测而得到的,这时的标定实质上是待标定传感器与标准传感器之间的比较,如图1-21所示。
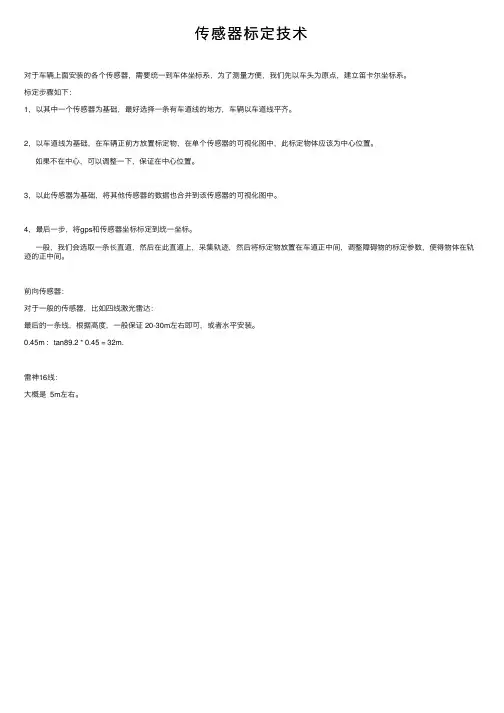
传感器标定技术
对于车辆上⾯安装的各个传感器,需要统⼀到车体坐标系,为了测量⽅便,我们先以车头为原点,建⽴笛卡尔坐标系。
标定步骤如下:
1,以其中⼀个传感器为基础,最好选择⼀条有车道线的地⽅,车辆以车道线平齐。
2,以车道线为基础,在车辆正前⽅放置标定物,在单个传感器的可视化图中,此标定物体应该为中⼼位置。
如果不在中⼼,可以调整⼀下,保证在中⼼位置。
3,以此传感器为基础,将其他传感器的数据也合并到该传感器的可视化图中。
4,最后⼀步,将gps和传感器坐标标定到统⼀坐标。
⼀般,我们会选取⼀条长直道,然后在此直道上,采集轨迹,然后将标定物放置在车道正中间,调整障碍物的标定参数,使得物体在轨迹的正中间。
前向传感器:
对于⼀般的传感器,⽐如四线激光雷达:
最后的⼀条线,根据⾼度,⼀般保证 20-30m左右即可,或者⽔平安装。
0.45m : tan89.2 * 0.45 = 32m.
雷神16线:
⼤概是 5m左右。

传感器标定实验
本实验所采用的硅光电池安装了带有狭缝的遮光筒以后作为小球垂直位移的测量装置,实现将小球的位移信号转化为光信号再转化为电压信号输出。
为此,必须通过实验精确的标定遮光筒的狭缝的透光长度与硅光电池输出电压之间的关系。
因此,在实验台搭建完毕后,设计了传感器性能标定实验。
实验器材:搭建好的磁悬浮实验台(不包含励磁系统),示波器,数字显示式游标卡尺(0.01mm)。
实验条件:
1.遮光筒狭缝1.5*20(mm);
2.光源:12V,20W直流铯灯;
3.狭缝距离光源距离25cm;
4.狭缝与遮蔽物之间距离2cm。
实验结果:
狭缝开度(mm)输出电压(mV)
全闭36.0
0 40.0
1.34 48.5
1.83 60.0
2.41 76.0
2.96 87.6
3.51 98.6
3.99 118
4.55 149
5.13 175
5.80 193
6.46 225
6.98 240
7.47 252
8.08 271
8.64 278
全开349
根据以上的实验结果,在matlab中绘制输出电压与狭缝开度之间的函数关系图如下:
点(6.98,240),并对其线性拟合,结果如下:
可以看出,其拟合方程为:y=41x-42.17。