MSP430F5529的IO口管脚的中断学习笔记
- 格式:docx
- 大小:10.16 KB
- 文档页数:2
MSP430F5529 实验指导书(V1.0)2014年10月27日东北林业大学机电工程学院“3+1”实验室实验一基础GPIO实验实验二键盘与液晶显示实验实验三时钟系统配置实验实验四看门狗与定时器实验实验五 AD/DA实验实验六比较器实验实验七 Flash实验实验八串行通信实验实验一基础GPIO实验【实验目的】1、熟悉CCS的基本使用方法;2、掌握MSP430系列单片机程序开发的基本步骤;3、掌握MSP430 IO口的基本功能。
【实验仪器】1、SEED-EXP430F5529v1.0开发板一套;2、PC机操作系统Windows XP或Windows 7,CCSv5.1集成开发环境。
【实验原理】CCS(Code Composer Studio)是 TI 公司研发的一款具有环境配置、源文件编辑、程序调试、跟踪和分析等功能的集成开发环境,能够帮助用户在一个软件环境下完成编辑、编译、链接、调试和数据分析等工作。
CCSv5.1 为 CCS 软件的最新版本,功能更强大、性能更稳定、可用性更高,是 MSP430 软件开发的理想工具。
SEED-EXP430F5529v1.0开发板上的有8个可操作的LED灯,与MCU的IO口对应关系如图1-1所示:图1-1 LED与MCU的IO对应关系电路我们可以通过控制单片机IO口的输出电平状态来控制各个LED灯的亮灭。
开发板上还有2个可操作的按键S1,S2。
如图1-2所示。
图1-2 按键电路我们可以通过读取与按键相连的IO口的输入电平状态来执行相应的操作。
此外,S1,S2还可以作为外部中断源,触发中断。
【实验内容】1、用调用头文件的方法,使能MSP430F5529开发板上的8个LED灯依次按顺序循环点亮;2、用按键S1控制开发板上LED1的亮灭状态(查询法);3、用按键S2控制开发板上跑马灯的循环速度(中断方式)。
【实验步骤】内容1:使能开发板上的8个LED灯依次按顺序循环点亮1、打开CCSv5并确定工作区间,然后选择File-->New-->CCS Project 弹出图1-3对话框。
msp430f5529 引脚图
MSP430F5529 实验板(MSP-EXP430F5529)是一个用于MSP430F5529 器件(来自最新一代具有集成USB 的MSP430 器件)的开发平台。
该实验板与CC2520EMK 等众多TI 低功耗射频无线评估模块兼容。
该实验板能帮助设计者快速使用新的F55xx MCU 进行学习和开发,其中F55xx MCU 为能量收集、无线传感以及自动抄表基础设施(AMI)等
应用提供了业界最低工作功耗的集成USB、更大的内存和领先的集成技术。
该实验板上的MSP430F5529 器件可以通过集成ezFET 或通过TI 闪存仿真工具(如MSP-FET430UIF)进行供电和调试。
基于新的MSP430F5529 MCU,可用于需要增强型功能和集成USB 的超低功耗设计
凭借eZ430-RF2500 工具、用于Z-Stack Pro 的开包即用平台以及对各种TI 低功耗射频无线评估模块的支持,可实现快速的低功耗无线开发,
覆盖低于1GHz 和2.4GHz 的频带。
电子科技大学实验报告学生姓名:学号:指导教师:邮箱:一、实验室名称:MSP430单片机实验室二、实验项目名称:25Hz方波发生及峰值幅度测量三、实验原理:(1)通用功能I/O参见实验一中相关原理介绍。
(2)定时器(Timer)定时功能模块是MSP430应用系统中经常用到的重要部分,可用来实现定时控制、延迟、频率测量、脉宽测量和信号产生、信号检测等等。
一般来说,MSP430所需的定时信号可以用软件和硬件两种方法来获得。
MSP430系列有丰富定时器资源:看门狗定时器(WDT),定时器A(Timer_A),定时器B(Timer_B)和定时器D(Timer_D)等。
MSP430系列定时器部件功能,如表2-1所示:表2-1 MSP430中定时器的功能(a)看门狗定时器,主要作用在于当“程序跑飞”时,会产生溢出,从而产生系统复位,CPU需要重新运行用户程序,这样程序就可以又回到正常运行状态。
MSP430 看门狗模块具有以下特性:●8 种软件可选的定时时间●看门狗工作模式●定时器工作模式●带密码保护的WDT 控制寄存器●时钟源可选择●为降低功耗,可停止●时钟失效保护(b)定时器A由一个16位定时器和多路捕获/比较通道组成。
MSP430X5XX / 6XX系列单片机的Timer _A有以下特性:●带有4 种操作模式的异步16 位定时/计数器●输入时钟可以有多种选择,可以是慢时钟,快时钟以及外部时钟●可配置捕获/比较寄存器数多达7 个●可配置的PWM(脉宽调制)输出●异步输入和同步锁存。
不仅能捕获外部事件发生的时间还可锁定其发生时的高低电平●完善的中断服务功能。
快速响应Timer_A中断的中断向量寄存器●8种输出方式选择●可实现串行通讯Timer_A由以下4部分组成:定时计数器:16 位定时/计数寄存器——TAxR时钟源的选择和分频:定时器时钟TACLK 可以选择ACLK,SMCLK 或者来自外部的TAxCLK。

Msp430f5529开发板测频率和ADC采样电压必备资料:f5529的中文指导和数据手册(遗憾是汇编语言不是C)中文指导:网上有大侠把英文版的用户指导翻译成中文了数据手册:还没有出现中文版这种神器,不过多看几遍就OK一.定时器A一些基本资料至于寄存器里面含义自己应该可以看懂!这句话我认为有一个极容易产生一个误区,就是TA有7个比较捕获寄存器,当你查看msp430f5529.h的时候,我就发现只有TAxCCTL0,TAxCCR0TAxCCTL1,TAxCCR1TAxCCTL2,TAxCCR2它们都是共用一个TACTL。
压根就是没有3~6例如没有TAxCCTL3,TAxCCR3,我认为单片机上肯定是有7个比较捕获寄存器,就是msp430f5529没有对剩余的四个进行宏定义。
个人想法。
这个最高级,好像大部分的430单片机写的程序都是优先写它。
特点:增计数模式连续计数模式增减计数模式!!!!!!!这几种模式都能用例如增计数模式:TA0CCTL0 = CCIE; // CCR0 interrupt enabledTA0CCR0 = 50000;TA0CTL = TASSEL_2 + MC_1 + TACLR; // SMCLK, upmode, clear TAR __bis_SR_register(GIE); // Enter LPM0, enable interrupts 就凭它的权力最多,就应该单独想用一个中断函数与CCTL1,CCTL2区分开来!// Timer0 A0 interrupt service routine#pragma vector=TIMER0_A0_VECTOR__interrupt void TIMER0_A0_ISR(void){}其中的R0代表你用的TA定时器的第几个TA0-----R0TA1-----R1TA2-----R2CCTL0---A0 一个中断对应一个中断源例如我写的是TA2CCTL0和TA2CCR0,则对应的中断就是#pragma vector=TIMER2_A0_VECTOR应该明白了吧!TAxCCTL2,TAxCCR2特点:连续计数模式经我调试TA0CCTL1 = CCIE; // CCR0 interrupt enabledTA0CCR1 = 50000;TA0CTL = TASSEL_2 + MC_1 + TACLR; // SMCLK, upmode, clear TAR是进不了中断的,这是血的教训,(如果你采用的是比较模式,千万别想着,TMD 理论上就是这样,为什么进不了中断)应该把 MC_1改为MC_2就OK了.官方这样说这样可以从侧面提问,上文中为什么不是TAxCCRx,而只是TAxCCR0!应该明白了,这里有一点千万要区分开来,这是晕死的教训!TA0R,与TA0CCR1的区别,我也不知道是看了那本破书,或者就是那些5系列一下的430单片机程序可以,我只能感叹F5529真是神器!在中断函数里把cap=TA0CCR1,或者是TA1CCR1,还说TA0R,TA0CCRx其实是一样的,就是计数的储存。
基于MSP430F5529的简易风洞控制系统设计胡进德;付晓军【摘要】基于MSP430F5529设计了一个简易风洞控制系统.选用超声波传感器检测乒乓球在简易风洞中的位置,微控制器MSP430F5529通过对乒乓球当前位置的分析判断控制直流电机的转速,从而完成对乒乓球升降高度的实时控制.【期刊名称】《微型机与应用》【年(卷),期】2016(035)006【总页数】3页(P88-90)【关键词】MSP430F5529;超声波传感器;实时控制【作者】胡进德;付晓军【作者单位】仙桃职业学院,湖北仙桃433000;仙桃职业学院,湖北仙桃433000【正文语种】中文【中图分类】TP273本设计实现一个简易风洞控制系统。
风洞由圆管、连接部与直流风机构成,如图1所示。
圆管竖直放置,长度约40 cm,内径大于4 cm,且内壁平滑,小球(直径4 cm的黄色乒乓球)可在其中上下运动;管体外壁有A、B、C、D 等长标志线,BC 段有1 cm 间隔的短标志线;可从圆管外部观察管内小球的位置;连接部实现风机与圆管的气密性连接,圆管底部有防止小球落入连接部的格栅。
控制系统通过调节风机的转速,实现小球在风洞中升降高度的实时控制。
系统在小球到达设定位置时可声光报警并显示小球的升降高度和动作时间等参数。
系统主要由超声波传感器检测电路、直流电机驱动电路、显示电路、报警电路、MSP430F5529微控制器、电压转换电路等模块构成。
系统硬件结构如图2所示。
选用合适的超声波传感器检测小球在风洞中的位置,超声波传感器将小球位置信号转换成电信号,由MSP430F5529微控制器记录和分析处理。
MSP430F5529调节直流电机的转速,由此调节风力的大小从而实现对小球升降高度的自动测量与控制。
2.1 小球位置检测与报警电路采用超声波测距模块HY-SRF05检测乒乓球在简易风洞中的位置。
HY-SRF05超声波测距模块可提供2~450 cm的非接触式距离感测功能,检测精度高达3 mm。
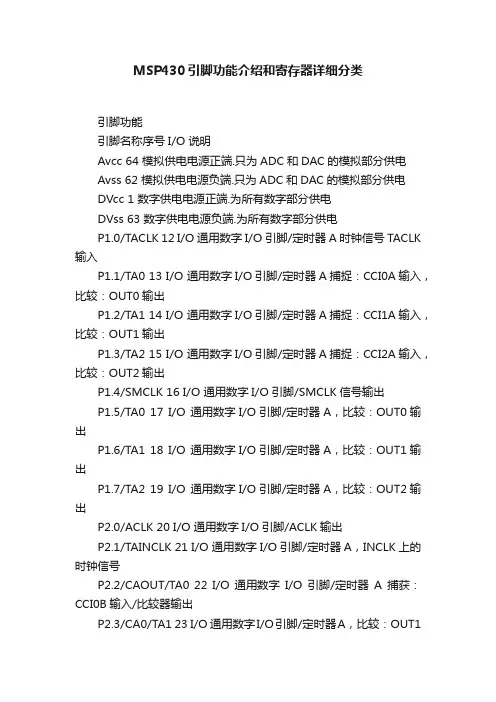
MSP430引脚功能介绍和寄存器详细分类引脚功能引脚名称序号I/O 说明Avcc 64 模拟供电电源正端.只为ADC和DAC的模拟部分供电Avss 62 模拟供电电源负端.只为ADC和DAC的模拟部分供电DVcc 1 数字供电电源正端.为所有数字部分供电DVss 63 数字供电电源负端.为所有数字部分供电P1.0/TACLK 12 I/O 通用数字I/O引脚/定时器A时钟信号TACLK 输入P1.1/TA0 13 I/O 通用数字I/O引脚/定时器A捕捉:CCI0A输入,比较:OUT0输出P1.2/TA1 14 I/O 通用数字I/O引脚/定时器A捕捉:CCI1A输入,比较:OUT1输出P1.3/TA2 15 I/O 通用数字I/O引脚/定时器A捕捉:CCI2A输入,比较:OUT2输出P1.4/SMCLK 16 I/O 通用数字I/O引脚/SMCLK信号输出P1.5/TA0 17 I/O 通用数字I/O引脚/定时器A,比较:OUT0输出P1.6/TA1 18 I/O 通用数字I/O引脚/定时器A,比较:OUT1输出P1.7/TA2 19 I/O 通用数字I/O引脚/定时器A,比较:OUT2输出P2.0/ACLK 20 I/O 通用数字I/O引脚/ACLK输出P2.1/TAINCLK 21 I/O 通用数字I/O引脚/定时器A,INCLK上的时钟信号P2.2/CAOUT/TA0 22 I/O 通用数字I/O引脚/定时器A捕获:CCI0B输入/比较器输出P2.3/CA0/TA1 23 I/O 通用数字I/O引脚/定时器A,比较:OUT1输出/比较器A输入P2.4/CA1/TA2 24 I/O 通用数字I/O引脚/定时器A,比较:OUT2输出/比较器A输入P2.5/Rosc 25 I/O 通用数字I/O引脚,定义DCO标称频率的外部电阻输入P2.6/ADC12CLK/ 26 I/O 通用数字I/O引脚,转换时钟-12位ADC,DMA通道0外部触发器P2.7/TA0 27 I/O 通用数字I/O引脚/定时器A比较:OUT0输出P3.0/STE0 28 I/O 通用数字I/O引脚,USART0/SPI模式从设备传输使能端P3.1/SIMO0/SDA 29 I/O 通用数字I/O引脚,USART0/SPI模式的从入/主出,I2C数据P3.2/SOMI0 30 I/O 通用数字I/O引脚,USART0/SPI模式的从出/主入P3.3/UCLK0/SCL 31 I/O 通用数字I/O引脚,USART0/SPI模式的外部时钟输入,USART0 P3.4/UTXD0 32 I/O 通用数字I/O引脚,USART0/UART模式的传输数据输出P3.5/URXD0 33 I/O 通用数字I/O引脚,USART0/UART模式的接收数据输入P3.6/UTXD1 34 I/O 通用数字I/O引脚,USI1/UART模式的发送数据输出P3.7/URXD1 35 I/O 通用数字I/O引脚,USI1/UART模式的接收数据输入P4.0/TB0 36 I/O 通用数字I/O引脚,捕获I/P或者PWM输出端口-定时器B7 CCR0P4.1/TB1 37 I/O 通用数字I/O引脚,捕获I/P或者PWM输出端口-定时器B7 CCR1P4.2/TB2 38 I/O 通用数字I/O引脚,捕获I/P或者PWM输出端口-定时器B7 CCR2P4.3/TB3 39 I/O 通用数字I/O引脚,捕获I/P或者PWM输出端口-定时器B7 CCR3P4.4/TB4 40 I/O 通用数字I/O引脚,捕获I/P或者PWM输出端口-定时器B7 CCR4P4.5/TB5 41 I/O 通用数字I/O引脚,捕获I/P或者PWM输出端口-定时器B7 CCR5P4.6/TB6 42 I/O 通用数字I/O引脚,捕获I/P或者PWM输出端口-定时器B7 CCR6P4.7/TBCLK 43 I/O 通用数字I/O引脚,输入时钟TBCLK-定时器B7P5.0/STE1 44 I/O 通用数字I/O引脚,USART1/SPI模式从设备传输使能端P5.1/SIMO1 45 I/O 通用数字I/O引脚,USART1/SPI模式的从入/主出P5.2/SOMI1 46 I/O 通用数字I/O引脚,USART1/SPI模式的从出/主入P5.3/UCLK1 47 I/O 通用数字I/O引脚,USART1/SPI模式的外部时钟输入,USART0/SPI 模式的时钟输出- 8 -P5.4/MCLK 48 I/O 通用数字I/O引脚,主系统时钟MCLK输出P5.5/SMCLK 49 I/O 通用数字I/O引脚,子系统时钟SMCLK输出P5.6/ACLK 50 I/O 通用数字I/O引脚,辅助时钟ACLK输出P5.7/TboutH/ 51 I/O 通用数字I/O引脚,将所有PWM数字输出端口为高阻态-定时器B7P6.0/A0 59 I/O 通用数字I/O引脚,模拟量输入A0-12位ADC P6.1/A1 60 I/O 通用数字I/O引脚,模拟量输入A1-12位ADC P6.2/A2 61 I/O 通用数字I/O引脚,模拟量输入A2-12位ADC P6.3/A3 2 I/O 通用数字I/O引脚,模拟量输入A3-12位ADC P6.4/A4 3 I/O 通用数字I/O引脚,模拟量输入A4-12位ADC P6.5/A5 4 I/O 通用数字I/O引脚,模拟量输入A5-12位ADCP6.6/A6/DAC0 5 I/O 通用数字I/O引脚,模拟量输入A6-12位ADC,DAC.0输出P6.7/A7/DAC1/ 6 I/O 通用数字I/O引脚,模拟量输入A7-12位ADC,DAC.1输出,SVS输入RST/NMI 58 I 复位输入,不可屏蔽中断输入端口或者Bootstrap Lload启动(FLASHTCK 57 I 测试时钟,TCK是芯片编程测试和bootstrap loader启动的时钟输入端口TDO/TDI 54 I/O 测试数据输出端口,TDO/TDI数据输出或者编程数据输出引脚TMS 56 I 测试模式选择,TMS用作芯片编程和测试的输入端口VeREF+ 10 I/P 外部参考电压的输入VREF+ 7 O 参考电压的正输出引脚VREF-/VeREF- 11 O 内部参考电压或者外加参考电压的引脚XIN 8 I 晶体振荡器XT1的输入端口,可连接标准晶振或者钟表晶振XOUT/TCLK 9 I/O 晶体振荡器XT1的输出引脚或测试时钟输入XT2IN 53 I 晶体振荡器XT2的输入端口,只能连接标准晶振XT2OUT 52 O 晶体振荡器XT2的输出引脚时钟模块DCO.0-DCO.4 定义8 种频率之一,可以分段调节DCOCLK 频率,相邻两种频率相MOD.0-MOD.4 定义在32 个DCO 周期中插入的Fdco+1 周期个数,而在下的DCO 周期中为Fdco 周期,控制改换DCO 和DCO+1 选择的两种频率。
去掉,或者减小RST引脚上的电容。
因为电容太大了编程器无法复位430。
因此检测失败。
如果仍未解决,可能还是你的引脚连接有问题。
没找到芯片。
如果电脑---仿真器----MSP430芯片的电气连接是正确可靠,没接触不良的话,可能的情况有:外部复位芯片复位引脚直接连至单片机引脚;并口仿真器中BIOS参数设置不正确;3.3V负载大,电路板没上电烧写;芯片引脚或电路板有短路、断路问题;USB-JTAG未能成功启动、运行;单片机熔丝烧过了或坏了;MSP430系列单片机复位电路系统设计分析2010年11月04日 10:59 本站整理作者:佚名用户评论(0)关键字:MSP430(105)复位电(1)0 引言TI公司的混合信号处理器MSP430系列单片机以其处理能力强大、外围器件集成度高、功率消耗低、产品系列全面、全系列工业级等特点,作为目前MCU主流市场的产品之一,在电子应用领域中得到广泛应用,被越来越多的电子设计师所青睐。
由于复位电路设计问题而导致的系统出现上电后不工作或状态不正确是很多MSP430单片机电路设计者们在设计、调试和应用中曾遇到过的问题,尽管这种情况发生的几率很低,但对于可靠性要求较高的应用场合,这个现象仍需引起电子设计人员的足够重视。
为此,本文对MSP430全系列单片机的复位系统和复位机制进行了详细深入的分析,并针对性地提出了具体的外围复位电路设计方案和有关电子元器件的详细介绍,以供同行参考和交流。
1 MSP430复位机制1.1 MSP430复位电路MSP430的复位电路包括一个上电复位(POR)和上电清除信号(PUC)。
POR是设备复位信号,它通常在以下三种事件发生时被触发:a.上电;b.复位模式下RST/NMI脚出现低电平;c.电压监控设备(Brownout)触发。
POR时序见图1(a)所示。
当供电电压VCC缓慢上升时,POR监测器保持POR信号有效直到VCC超出VPOR水平;当供电电压VCC快速上升时,POR延时t(POR DELAY)提供了足够长的有效POR信号以确保MSP430有足够的时间进行初始化。
MSP430F5529 实验指导书(V1.0)2014年10月27日东北林业大学机电工程学院“3+1”实验室实验一基础GPIO实验实验二键盘与液晶显示实验实验三时钟系统配置实验实验四看门狗与定时器实验实验五 AD/DA实验实验六比较器实验实验七 Flash实验实验八串行通信实验实验一基础GPIO实验【实验目的】1、熟悉CCS的基本使用方法;2、掌握MSP430系列单片机程序开发的基本步骤;3、掌握MSP430 IO口的基本功能。
【实验仪器】1、SEED-EXP430F5529v1.0开发板一套;2、PC机操作系统Windows XP或Windows 7,CCSv5.1集成开发环境。
【实验原理】CCS(Code Composer Studio)是 TI 公司研发的一款具有环境配置、源文件编辑、程序调试、跟踪和分析等功能的集成开发环境,能够帮助用户在一个软件环境下完成编辑、编译、链接、调试和数据分析等工作。
CCSv5.1 为 CCS 软件的最新版本,功能更强大、性能更稳定、可用性更高,是 MSP430 软件开发的理想工具。
SEED-EXP430F5529v1.0开发板上的有8个可操作的LED灯,与MCU的IO口对应关系如图1-1所示:图1-1 LED与MCU的IO对应关系电路我们可以通过控制单片机IO口的输出电平状态来控制各个LED灯的亮灭。
开发板上还有2个可操作的按键S1,S2。
如图1-2所示。
图1-2 按键电路我们可以通过读取与按键相连的IO口的输入电平状态来执行相应的操作。
此外,S1,S2还可以作为外部中断源,触发中断。
【实验内容】1、用调用头文件的方法,使能MSP430F5529开发板上的8个LED灯依次按顺序循环点亮;2、用按键S1控制开发板上LED1的亮灭状态(查询法);3、用按键S2控制开发板上跑马灯的循环速度(中断方式)。
【实验步骤】内容1:使能开发板上的8个LED灯依次按顺序循环点亮1、打开CCSv5并确定工作区间,然后选择File-->New-->CCS Project 弹出图1-3对话框。
学习笔记-CCS-MSP430F5529[快速⼊门篇⼆] 由于2021的全国电赛延期了,从今天开始打算好好整理⼀下使⽤CCS编程的经验,本篇笔记会好好整理⼀下我备赛期间⽤CCS写的程序,包括外部中断,定时器部分的定时中断,定时器输⼊捕获,PWM波输出,UART,OLED(IIC),MPU6050,内容涵盖了硬件和软件部分。
鉴于笔者⽔平有限和能⼒不⾜,⽂中有不到之处还请看者多包涵,我的⼯程源代码链接会在⽂章末尾贴出。
先贴⼀张peripheral图,MSP430的外部引脚及其复⽤功能都可在图⾥查到。
⼀·外部中断 外部中断的操作⽅式与GPIO⼀样是使⽤寄存器操作,所以学习相关的寄存器是不可避免的,不过MSP430的寄存器不算太多,操作外部中断主要要⽤到以下寄存器:1.PxIV 中断向量表(字),P1端⼝的中断函数⼊⼝地址应该都放在⾥⾯,只是⼀个地址;2.PxIE 中断使能寄存器,相应引脚位置1表⽰允许产⽣中断;置0表⽰该引脚不产⽣中断;3.PxIES 中断触发⽅式选择寄存器,相应引脚位置1表⽰下降沿触发,置0表⽰上升沿触发;4.PxIFG 中断标志,由于MSP430的中断使能需要使能总中断,所以仅当总中断GIE和中断使能寄存器PxIE都打开后,PxIFG⾼电平表⽰有中断请求等待待响应,等中断服务函数结束时需要软件清该标志位; 这些寄存器在TI的msp430f5xx_6xxgeneric.h头⽂件有如下定义下⾯看⼀个外部中断程序,所⽤引脚为P2.1,对应MSP430F5529⽕箭板的板载按键S1,初始化为下降沿触发void EXTI_Init(){/*按键中断*/P2IE |= BIT1; //P2.1中断使能P2IES |= BIT1; //设置为下降沿触P2IFG &= ~BIT1; //清中断标志位P2REN |= BIT1; //上拉电阻P2OUT |= BIT1; //初始化置⾼}/*中断服务函数*/#pragma vector=PORT2_VECTOR__interrupt void P2_ISR(void){if(P2IFG & BIT1){delay(2); //延时2ms消抖动/*这⾥是函数算法部分*/}P2IFG &=~BIT1; //清空中断标志}⼆·定时器MSP430的定时器资源还算丰富,共有两类共四个定时器,分别是3个TimerA和1TimerB,由于我对TimerA使⽤较多,所以本⽂着重来讲TimerA,三个TimerA分别为Timer0_A(5个捕获/⽐较寄存器),Timer1_A(3个捕获/⽐较寄存器),Timer2_A(3个捕获/⽐较寄存器),下⾯是TimerA的结构图我们结合TimerA的寄存器讲解⼀下这张图上半部分是整个定时器的基础,整个上半部分可通过TACTL控制寄存器来编程,从功能⾓度来讲从左往右分别是,⾃⾝时钟源配置TASSEL,第⼀次分频选择ID,定时器清零位TACLR,计数值存放寄存器TAR,⼯作模式控制位MC,中断标志位TAIFG以及没有在结构图出现的定时器中断使能TAIE。
msp430io口的配置和使用msp430 io口的配置和使用一 I/O的简介1、各种复用和各种设置(可以作为简单IO功能也可以作各种第二功能;可控制为输入、输出、接上拉电阻、接下拉电阻、接受中断等各种情况);2、IO口常用寄存器有:PXDIR、PXIN、PXOUT、PXREN、PXSEL、PXDS;其中,X可以是1~8,也可以是A~D,因为P1、P2可以合称为PA。
例如(PAREN=0x0480)就等价于(P2REN=0x04、P1REN=0x80)。
IO口中断相关寄存器:PXIV、PXIFGX、PXIE、PXIES;由于IO 中断仅存在于P1口和P2口,因此X只能为1或2,而且不可以为A。
3、msp430f5529.h中定义了BIT0~BITF,方便用户进行位操作。
例如要设置P1.7和P2.2为输入,代码可如下:PADIR &= ~(BITA + BIT7)。
二 IO口常用寄存器配置1、PxDIR,Px口方向寄存器0 端口配置为输入(默认)1 端口配置为输入2、PxOUT,Px口输出寄存器(输入、输出两种模式)当IO口配置为输出模式时:0 输出低电平1 输出高电平当IO口配置为输入模式并且置高/ 置低使能时:0置低1置高3、PxIN,Px 口输入寄存器只读4、PxREN,Px口置高/ 置低使能寄存器0关闭置高/ 置低1使能置高/ 置低5、PxSEL,Px功能选择寄存器(IO中断只有在普通IO下才能使用)0普通的I/O(默认)1有连接外围电路的特殊用途6、PxDS,Px 口输出驱动能力寄存器(我都是用的默认)0减弱输出驱动能力(默认)1全力输出驱动能力三普通IO使用举例说明:本例程是流水灯加按键控制,每次S1按下,便在等待S2按下,否则,所有LED一直闪烁。
若无按键按下,则八盏灯以流水灯方式显示。
#include ;#define uint8_t unsigned char#define uint16_t unsigned int//********* 控制LED的IO口宏定义************* #define LED145678_PORT_DIRP1DIR#define LED145678_PORT_OUTP1OUT#define LED23_PORT_DIRP8DIR#define LED23_PORT_OUTP8OUT//************ LED的IO口宏定义 ************* #define LED1 0x01#define LED20x02#define LED30x04#define LED40x08#define LED50x10#define LED60x20#define LED70x40#define LED80x80#define LED_ALL0xFF//************ 按键的IO口宏定义************* #define BUTTON_S1(P1IN & BIT7)#define BUTTON_S2(P2IN & BIT2)//*********************************************** ***********//*函数: void delay(uint16_t x_ms)//*功能:延时程序//*参数: x_ms(单位:ms)//*返回:无//*备注:无//*********************************************** ***********void delay(uint16_t x_ms){uint16_t i=0,j=0;for(i=x_ms;i>;0;i--)for(j=110;j>;0;j--);}//*********************************************** ***********//*函数: void LED_Init()//*功能: LED的IO口方向初始化//*参数:无//*返回:无//*备注:无//*********************************************** ***********void LED_Init(){LED145678_PORT_OUT &= ~(BIT0 + BIT1 + BIT2 + BIT3 + BIT4 + BIT5);LED145678_PORT_DIR |= BIT0 + BIT1 + BIT2 + BIT3 + BIT4 + BIT5;LED23_PORT_OUT &= ~(BIT1 + BIT2);LED23_PORT_DIR |= BIT1 + BIT2;}//*********************************************** ***********//*函数: void Board_ledOn(uint8_t ledMask)//*功能:打开输入的那盏灯//*参数: ledMask//*返回:无//*备注:无//**********************************************************void Board_ledOn(uint8_t ledMask){if (ledMask & LED1) LED145678_PORT_OUT |= BIT0; if (ledMask & LED2) LED23_PORT_OUT |= BIT1;if (ledMask & LED3) LED23_PORT_OUT |= BIT2;if (ledMask & LED4) LED145678_PORT_OUT |= BIT1; if (ledMask & LED5) LED145678_PORT_OUT |= BIT2; if (ledMask & LED6) LED145678_PORT_OUT |= BIT3; if (ledMask & LED7) LED145678_PORT_OUT |= BIT4; if (ledMask & LED8) LED145678_PORT_OUT |= BIT5; }//*********************************************** ***********//*函数: void Board_ledOff(uint8_t ledMask)//*功能:关闭输入的那盏灯//*参数: ledMask//*返回:无//*备注:无//*********************************************** ***********void Board_ledOff(uint8_t ledMask){if (ledMask & LED1) LED145678_PORT_OUT &= ~BIT0; if (ledMask & LED2) LED23_PORT_OUT &= ~BIT1;if (ledMask & LED3) LED23_PORT_OUT &= ~BIT2;if (ledMask & LED4) LED145678_PORT_OUT &= ~BIT1; if (ledMask & LED5) LED145678_PORT_OUT &= ~BIT2; if (ledMask & LED6) LED145678_PORT_OUT &= ~BIT3; if (ledMask & LED7) LED145678_PORT_OUT &= ~BIT4; if (ledMask & LED8) LED145678_PORT_OUT &= ~BIT5; }//*********************************************** ***********//*函数: void Board_ledToggle(uint8_t ledMask)//*功能:输入的那盏灯的状态取反//*参数: ledMask//*返回:无//*备注:无//*********************************************** ***********void Board_ledToggle(uint8_t ledMask){if (ledMask & LED1) LED145678_PORT_OUT ^= BIT0;if (ledMask & LED2) LED23_PORT_OUT ^= BIT1;if (ledMask & LED3) LED23_PORT_OUT ^= BIT2;if (ledMask & LED4) LED145678_PORT_OUT ^= BIT1; if (ledMask & LED5) LED145678_PORT_OUT ^= BIT2; if (ledMask & LED6) LED145678_PORT_OUT ^= BIT3; if (ledMask & LED7) LED145678_PORT_OUT ^= BIT4; if (ledMask & LED8) LED145678_PORT_OUT ^= BIT5; }//*********************************************** ***********//*函数: void main(void)//*功能:主函数//*参数:无//*返回:无//*备注:无//*********************************************** ***********void main(void){uint8_t LED = LED1; //定义变量LEDWDTCTL = WDTPW | WDTHOLD;//关闭看门狗LED_Init(); //初始化LED的IO口方向PADIR &= ~(BITA + BIT7); //将按键的IO口方向设为输入PAREN |=(BITA + BIT7); //置高/ 置低使能PAOUT |=(BITA + BIT7); //置高(类似于上拉)while(1){Board_ledOn(LED);delay(1000); //延时1s左右Board_ledOff(LED);LED = LED。
MSP430F552X中文手册及例程一、先写一篇开个头:这样快速闯入MSP430学习过程进入各个电子产品公司的网站,招聘里面嵌入式占据了大半工程师职位。
广义的嵌入式无非几种:传统的什么51单片机、 MSP430称做嵌入式微控制器;ARM是嵌入式微处理器;当然还有DSP;FPGA。
我们现在就不说别的,就说MSP430单片机,多数想学MSP430的童鞋,对89C51内核系列的单片机是很熟悉的,为了加深对MSP430 系列单片机的认识吗,迅速闯入MSP430学习过程,就必须彻底了解MSP430单片机,我们不妨将51单片机和MSP430两者进行一下比较。
第一点, 51内核单片机是8 位单片机。
其指令是采用的被称为“ CISC ”的复杂指令集,共具有111 条指令。
而MSP430 单片机是16 位的单片机,采用了精简指令集( RISC )结构,只有简洁的27 条指令,大量的指令则是模拟指令,众多的寄存器以及片内数据存储器都可参加多种运算。
这些内核指令均为单周期指令,功能强,运行的速度快。
第二点,MCU主要分为两种工作模式:待机与执行。
51内核单片机正常情况下消耗的电流为mA级 ,在掉电状态下,其耗电电流仍约为3mA左右 ;即使在掉电方式下,电源电压可以下降到2V ,但是为了保存内部RAM 中的数据,还需要提供约50uA的电流。
而430单片机功耗是在uA级的,工作电流极小,并且超低功耗,关断状态下的电流仅为0.1μA,待机电流为0.8μA,常规模式下的(250μA/1MIPS@3V),端口漏电流不足50 nA,并可零功耗掉电复位(BOR)。
另外,该芯片属低电器件,仅需1.8~3.6V电压供电,因而可有效降低系统功耗。
MSP430将低功耗模式扩展为7种,分别对应不同应用场合及任务的低功耗方式。
以睡眠模式为例,包括深度睡眠模式RTC:只有时钟在跑而其他都不动,目前,TI宣布其MSP430在RTC模式下最低功耗仅为360nA。
中断的理解和以I/O口为例说明如何实现中断一、中断的理解没有中断的单片机就是残次品,当然也不会被人所器重,因此在激烈的市场竞争中就被淘汰了。
可见,中断对单片机而言是多么重要。
所谓中断就是暂停CPU正在运行的程序,转去执行相应的中断服务程序,完毕后返回被中断的程序继续运行的现象和技术。
下面给大家举个例子来帮助大家理解中断。
假设你自己就是CPU,正处于假期模式,在家“休养生息”,每天的生活就是睡觉、起床、看看书和看看电影。
比如你现在正在看书,突然你妈妈叫你帮忙收拾一下碗筷,你就会把当前读到的位置折一下做个标记,并暂停当前的读书动作,然后乖乖地去收拾碗筷。
那么,你妈妈“叫你”的这个动作对你来说就是请求了一次中断;你把当前读书的位置折一下,做个标记的这个过程就是“保存现场”,方便你忙完妈妈的任务之后再接着看;而你去“收拾碗筷”这个过程其实就相当于执行了一次中断程序。
很快你就完成了碗筷的收拾,继续去看书,并且从你之前做标记的地方开始,这其实就算完成了“中断返回”。
例如你正在看电影,你爸爸叫你去忙别的事情,也是请求了一次中断,你会把电脑先暂停,等你忙完你爸爸的任务后,回来再接着看。
我们来看看如果没有中断功能会是什么情况。
没有“中断功能”的你其实就是聋哑人,别人说话你听不到。
你爸妈脾气都不好,为了防止挨骂,你只能全天候的待在爸妈身边,看到你爸妈使颜色,你就心领神会的立马去帮忙。
所以,你自己的事情就无法做了,你能做的事情就少了很多。
当然了,你也是一个独立的个体,你可以选择是否接受被人的指使。
如果你告诉自己,今天我只做自己的事情,任何人都不能打断,即使有人叫你,你也会选择左耳朵进,右耳朵出,继续忙你自己当前的工作。
这就可以通过寄存器配置,使单片机不允许中断的功能。
当然你可以选择你在做什么事情时不听别人的指使,做什么事情时停别人指使。
比如说你正在“刷牙”,你妈叫你吃饭,你肯定是要拒绝的(一嘴沫子怎么吃),等刷好了再吃;但是,你在“看电影”时,你妈让你收拾碗筷你就去做。
MSP430F5529的IO口管脚的中断学习笔记
非常简单的一个程序,在F5529 的开发板上用按键的IO 中断控制LED 的
亮灭:#include int main(void){ WDTCTL = WDTPW + WDTHOLD; // Stop watchdog timer P1DIR |= BIT0; //将LED1 对应的IO 口P1.0 设置为输出P1OUT &= ~BIT0; //初始化该灯设置为灭P1DIR &= ~BIT7; //将按键1 对应的
IO 口P1.7 设置为输入P1IFG &= ~BIT7; //初始化清空中断标志位P1IE |= BIT7; //P1.7 中断使能P1IES |= BIT7; //下降沿产生中断P1OUT |= BIT7; //P1.7 设置为上拉电阻:OUT = 1; REN = 1; P1REN |= BIT7; __enable_interrupt(); while(1);}#pragma vector = PORT1_VECTOR //固定格式,声明中断向量地址,不能变__interrupt void LED(void) //函数名,可以任意
定义{int i;switch(__even_in_range(P1IV,18)){case 0x10:for (i = 0; i 1.按键需要延时消抖
2. 标志位需要手动清零(此处不完全正确,还有问题需要考虑)
3. 中断程序格式:
#pragma vector = PORT2_VECTOR //固定格式,声明中断向量地址,不能变
__interrupt void fuck430(void) //函数名,可以任意定义
{
switch(__even_in_range(P2IV,18))
{
case 0x06:
break;。