一种轿车电动车窗防夹控制系统设计_张昕.
- 格式:doc
- 大小:550.00 KB
- 文档页数:12

电动车窗防夹设计电动车窗防夹设计电动车窗防夹系统概述电动车窗防夹系统是未来轿车的必备功能之一,在车窗上升过程中,车窗机构可以检测到运动方向上的障碍物或夹紧力,一旦有异常现象,就会迅速停止电机或改变电机的运动方向。
目前大部分车型已经具备这种安全特性。
汽车批量生产中采用的防夹方案有通过测量电机电流和采用霍尔传感器两种方式。
目前市场上销售的许多中低端车型都采用测量电机电流的方式,这种方式的特点是成本较低,技术成熟,但是未来的发展趋势却是采用霍尔传感器。
其原因在于:如果只采用检测电流的方式实现防夹功能,不能给车窗准确定位,例如不能准确区别玻璃是遇到障碍物还是到达顶端,因为这两种情况下电流都会增大,不便于判断防夹区的上下沿,也不利于精确判断防夹力和在使用中进行自学习。
本文介绍的电动车窗防夹系统采用霍尔传感器进行控制,可以检测电机的转速变化和车窗的行程。
与检测电机电流的方式相比,这种方式不仅可以实现相同的功能,而且更加直观,数学模型的构建更方便,算法也比较简单,同时还能实现自学习等功能。
电动车窗防夹系统设计的要求电动车窗防夹控制设计的基本要求有:第一次运行时可以自学习车窗的长度;数据保存在非易失性存储器中;厂家可以使用配置模式;用户可用一键上升/下降两种模式;自动关闭车窗(熄火信号);门自锁控制(防止小孩频繁操作);LIN/CAN接口(可选)。
前门的防夹力符合欧盟规定,每点的防夹力在60~100N之间。
具体的要求有:当电机上升过程触发防夹时,停止电机,当检测到防夹时,车窗向下运行一定的时间(由厂家具体制定)。
在整个车窗运动区域,只在特定的区域有防夹功能,并不是整个区域都防夹。
电机速度可控制,在车窗的中间部位,电机全速运行;当车窗到达最顶端或最底端时,电机减速防止玻璃破碎和产生撞击声。
进一步的要求有:控制板的待机静态电流为1~5mA,根据符合的欧盟标准不同而定。
另外系统的设计还需要带电池反极性保护及支持高达25V的电池电压,电压尖峰保护超过100V。
车辆工程技术54 车辆技术 汽车电动车窗、电动天窗玻璃的防夹伤控制以及升降电机的过载保护。
在电动车窗正常上升过程中,当在任意位置有物体被夹住时,控制器会立即停止上升动作,并自动返回到下死点,然后立即断电停机,以释放被夹物,保护司乘人员的安全(特别是6岁以下的儿童)。
在上下死点位置,无论升降开关是否松开,控制器均会自动断电,以避免电机因长时间堵转而烧毁。
如果电动车窗出现机械故障被卡住,控制器也会立即断电,有效保护电机不烧毁。
随着汽车电子技术的迅猛发展,消费者对汽车的舒适性和安全性要求也在不断提高。
车窗智能防夹系统是汽车车身的重要组成部分,大多数消费者都把电动车窗作为不可缺少的舒适功能,它能使人们更好地保护和驾驶汽车,因此汽车制造商都将其看作一种基本功能。
当前车窗系防夹统正朝着模块化、智能化、人性化的方向发展。
1 车窗升降系统的结构 车窗防夹控制系统是由直流电动机、减速器、柔性连接、车窗玻璃、滑轨、密封条组成。
由驾驶者控制总开关控制四个车窗的升降功能,乘客可以通过各个车门的分开关控制单独车窗的上升和下降。
2 选用防夹方案2.1 基于霍尔传感器的防夹技术 将磁环内置在车窗直流电机的输出轴上。
当车窗电机转动时,布置在电子模块中的霍尔传感器便产生霍尔信号。
系统通过分析获得的霍尔信号,利用霍尔信号的脉冲宽度进行判断车窗是否遇到障碍物,从而实现电动车窗防夹。
霍尔传感器拥有较高灵敏度,体积小的优点。
不过霍尔传感器感应的霍尔信号受温度影响非线性输出。
即此系统在日常使用中容易被环境因素影响,从而导致特定情况下防夹系统失效。
2.2 电流检测方式 对车窗电机的电流进行监测。
当车窗夹到异物时,车窗直流机的电流将会呈骤增趋势,此时即可判断车窗夹到物体,当满足条件时车窗控制器可立刻控制车窗直流电机的运转状态,从而实现车窗防夹技术。
2.3 纹波检测方式 电机运行时,若车窗受力达到一定数值时,纹波电流将会迅速下降,当车窗上没有阻力后,波纹电流将趋于平稳。

汽车车窗智能防夹系统设计一、引言随着汽车的普及和人们对行车安全的重视,汽车安全系统也得到了越来越多的关注。
车窗智能防夹系统作为汽车安全系统的重要组成部分,对防止车窗夹伤和防盗具有重要意义。
本文旨在设计一种车窗智能防夹系统,通过分析车窗智能防夹系统的工作原理、功能需求和系统组成,为汽车安全系统的设计和研发提供参考。
二、车窗智能防夹系统的工作原理车窗智能防夹系统是一种基于传感器和控制器的智能系统,通过对车窗上下行程的监测和控制,实现对车窗夹伤的防护。
其工作原理主要包括以下几个方面:1.传感器检测:车窗智能防夹系统通过安装在车窗上部和下部的传感器,实时监测车窗的上下行程。
传感器可以采用光电传感器、超声波传感器或者感应式开关传感器等,用来检测车窗的位置和遇阻反弹情况。
2.控制器处理:传感器检测到车窗上下行程时,会将信号传输给控制器进行处理。
控制器根据传感器反馈的信息,判断车窗是否遇阻,并控制车窗的上下运动。
3.防夹处理:当传感器检测到车窗在上升或下降过程中遇阻时,控制器会立即停止车窗的运动,并向外发出警报,以避免夹伤事故的发生。
4.自动上升:在车门关闭的过程中,车窗智能防夹系统会自动将车窗上升到指定位置,以防止车窗被外力夹住。
车窗智能防夹系统通过传感器的检测、控制器的处理和自动上升功能,有效地避免了车窗夹伤的发生,提高了乘车安全性。
车窗智能防夹系统作为汽车安全系统的重要组成部分,需要满足一系列功能需求,以保障车辆乘客的行车安全。
主要功能需求包括以下几个方面:1.车窗位置监测:需要能够实时监测车窗的上下行程,并准确判断车窗的位置。
2.遇阻自动反弹:当车窗在上升或下降过程中遇阻时,需要能够自动停止车窗的运动,并反弹至安全位置。
3.警报提示功能:在车窗遇阻时,需要能够发出警报提示,提醒车主及时处理问题。
4.手动操作功能:在必要时,需要能够切换到手动操作模式,以便车主在特殊情况下手动控制车窗的上下运动。
车窗智能防夹系统是由一系列传感器、控制器和执行机构组成的智能系统,其中每个组成部分都起着重要的作用。

汽车车窗智能防夹系统设计
汽车车窗智能防夹系统是为了保护乘坐车辆的人员在开启和关闭车窗时不会被夹到或伤害到而设计的一种安全系统。
该系统通过使用传感器和控制器来监测车窗的状态和周围环境,并根据情况采取相应的控制措施,以防止夹伤事故的发生。
该系统的设计包括以下几个部分:
1. 传感器:系统使用的传感器通常是红外线传感器或电容传感器,这些传感器能够检测到物体的接近和距离,并通过与之连接的控制器传递信息。
2. 控制器:控制器是系统的核心,它接收传感器传递的信息,并根据信息判断是否需要采取防夹措施。
控制器还可以控制车窗的开启和关闭以及其他相关操作。
3. 防夹措施:当控制器判断存在夹伤的危险时,它会采取相应的控制措施来防止夹伤事故的发生。
当有物体靠近车窗时,控制器可以自动停止车窗的开启或关闭,并发出警报以提醒乘坐车辆的人员注意安全。
4. 报警系统:系统还可以配备报警系统,当夹伤事故发生时,控制器会立即发出警报,提醒车内人员注意并及时采取措施。
在实际应用中,该系统可以与车辆的中控系统或电动窗控制系统相连接,通过输入输出接口实现与车辆其他系统的交互。
还可以通过与车辆的遥控系统相结合,实现远程操作和监控功能,提高用户的使用方便性和安全性。
一种轿车电动车窗防夹控制系统设计
张昕;李昌刚;胡俊杰;汪永斌
【期刊名称】《现代电子技术》
【年(卷),期】2010(33)17
【摘要】为解决汽车电动车窗的防夹设计问题,提出一种新的基于霍尔传感器和车窗电机电流检测的汽车车窗防夹系统设计方案.该方案采用霍尔传感器的脉冲信号数检测车窗位置,并设计了一种在车窗上升期间利用电机电流变化来判断车窗是否遇到障碍物及相应操作的控制算法.最后基于英飞凌XC164CS硬件平台和μC/OS-Ⅱ实时操作系统软件平台实现了该设计方案.试验检测数据表明,该系统具有良好的防夹功能.
【总页数】4页(P169-172)
【作者】张昕;李昌刚;胡俊杰;汪永斌
【作者单位】浙江万里学院,智能控制研究所,浙江,宁波,315100;浙江万里学院,电子信息学院,浙江,宁波,315100;浙江万里学院,电子信息学院,浙江,宁波,315100;浙江万里学院,电子信息学院,浙江,宁波,315100
【正文语种】中文
【中图分类】TN710-34
【相关文献】
1.电动车窗防夹系统设计 [J], 孟祥和;王卫东;
2.一种低成本汽车电动车窗防夹控制系统 [J], 王义;章俊华;邱云峰
3.汽车电动车窗防夹语音控制系统设计 [J], 王福林;庞丹君;胡卫东
4.一种面向应用的电动车窗防夹控制算法研究 [J], 罗婉丽;吴晓燕
5.基于电机电流检测的汽车电动车窗纹波防夹系统设计 [J], 李云;徐洋;李超;谭伟;熊秋涵
因版权原因,仅展示原文概要,查看原文内容请购买。
汽车车窗智能防夹系统设计汽车车窗智能防夹系统是一种用于保护乘车人员安全的装置,它可以在车窗关闭过程中自动检测任意物体或人的存在,并及时停止车窗运动,以防止夹伤事故的发生。
本文将介绍汽车车窗智能防夹系统的原理、设计要求以及实现方法。
一、智能防夹系统的原理汽车车窗智能防夹系统的核心原理是通过感应器来检测车窗周围的环境,当感应器检测到任意物体或人靠近车窗时,系统将迅速停止车窗的运动,以避免夹伤事故。
一般情况下,智能防夹系统采用的感应器包括红外线传感器、光电传感器和超声波传感器等,这些传感器能够感应到物体的存在并及时反馈给系统。
1. 灵敏度高:智能防夹系统需要能够及时准确地感应到车窗周围物体的存在,对于突发事件要能够做出快速反应,及时停止车窗的运动。
2. 稳定可靠:智能防夹系统在工作过程中需要保持稳定可靠的性能,不受外界干扰的影响,能够正常工作。
3. 适应性强:智能防夹系统需要适用于不同型号和品牌的汽车车窗,能够方便地安装和调节。
4. 低功耗:智能防夹系统需要具有较低的功耗,以降低对汽车电池的消耗,延长电池寿命。
5. 声音和光报警:智能防夹系统需要具备报警功能,当系统检测到夹住物体时,能够通过声音和光的方式提醒乘车人员。
智能防夹系统可以通过以下方式来实现:1. 使用红外线传感器:红外线传感器能够通过感应红外线信号来检测车窗周围的物体,当物体靠近车窗时,红外线传感器会感应到并及时反馈给系统,系统根据反馈信息停止车窗运动。
四、总结汽车车窗智能防夹系统是一种用于保护乘车人员安全的装置,通过感应器来检测车窗周围物体的存在,并及时停止车窗的运动,以避免夹伤事故的发生。
智能防夹系统具有灵敏度高、稳定可靠、适应性强、低功耗、报警功能等特点,可以使用红外线传感器、光电传感器和超声波传感器等实现。
随着智能化技术的发展,汽车车窗智能防夹系统将得到进一步的改进和优化,为乘车人员提供更加安全舒适的乘车体验。
汽车车窗智能防夹系统设计随着汽车的普及,汽车事故也随之增加,其中车窗夹伤事故是一种比较常见的车辆安全隐患。
为了避免车辆车窗在关闭时夹伤乘客的情况发生,智能防夹系统应运而生。
本文将就汽车车窗智能防夹系统的设计进行探讨。
一、智能防夹系统的功能及原理汽车车窗智能防夹系统是利用传感器、控制器和执行机构等设备,通过感知车窗与外部障碍物的距离并控制车窗的运动,以避免夹伤现象的发生。
其工作原理如下:当车窗下降时,传感器会感知车窗与外部物体的距离,若检测到有障碍物靠近车窗,控制器会立即停止车窗的下降动作,从而有效避免夹伤事故的发生。
同样,在车窗上升过程中,一旦传感器检测到障碍物,控制器会及时停止车窗的上升动作,确保乘客的安全。
1. 传感器选择在智能防夹系统中,传感器的选择至关重要。
传感器的作用是感知车窗与外部物体的距离,因此需要选择灵敏度高、精度高的传感器。
常见的传感器有超声波传感器、红外线传感器和光电传感器等。
超声波传感器具有较高的探测精度和长距离探测能力,是智能防夹系统中常用的一种传感器。
2. 控制器设计控制器是智能防夹系统的核心部件,其主要功能是对传感器采集的数据进行处理,并控制车窗的开闭动作。
控制器需要具备较高的计算能力和响应速度,以确保系统的可靠性和安全性。
控制器还需要具备良好的抗干扰能力,以应对复杂的车内外环境条件。
3. 执行机构选择智能防夹系统中的执行机构主要是指车窗升降电机,其选择需要考虑到电机的功率、扭矩和速度等参数。
为了确保系统的可靠性和安全性,执行机构还需要具备良好的耐磨性和抗腐蚀能力。
4. 系统整合在智能防夹系统的设计中,需要将传感器、控制器和执行机构等设备进行有效的整合,以确保系统的稳定性和可靠性。
还需要对系统进行严格的调试和测试,以验证系统的性能和安全性。
1. 提高车辆的安全性智能防夹系统能够在车窗与外部障碍物接触时立即停止车窗的开闭动作,有效避免夹伤事故的发生,提高了车辆的安全性和乘客的安全性。
汽车车窗智能防夹系统设计随着汽车的普及和使用,车窗防夹系统的重要性越来越受到人们的关注。
车窗智能防夹系统是一种能够保护乘客安全的设备,能够在车窗升降过程中自动感知是否有物体或人员被夹住,并及时停止窗户的升降,以避免危险的发生。
本文将从设计原理、感知方式、控制方式以及系统优化等方面分析汽车车窗智能防夹系统的设计。
设计原理是汽车车窗智能防夹系统的核心。
主要原理是通过安装在车窗上的传感器,对车窗附近的物体进行感知。
当传感器检测到物体时,系统会自动停止车窗的升降动作,以防止物体或人员被夹住。
传感器可以采用多种技术,如红外线、超声波、光电等,以提高系统的感知精度和可靠性。
感知方式是影响系统性能的重要因素。
传感器的选择和布置对系统的感知能力和速度都有很大的影响。
传感器应该能够准确地感知到车窗附近的物体,并且能够及时地将感知信号传输给控制单元。
传感器的布置可以根据车窗的结构和车厢空间的特点来确定,以提高系统的感知效果。
控制方式也对系统的性能起着至关重要的作用。
控制单元应该能够根据传感器的信号实时地控制车窗的升降动作。
控制方式可以采用硬件控制和软件控制相结合的方式,以提高系统的灵活性和可靠性。
硬件控制可以实现传感器的信号采集和处理,以及车窗控制装置的动作控制。
软件控制可以实现系统的智能化和自适应功能,以提高系统的安全性和性能。
系统的优化也是车窗智能防夹系统设计的重要方面。
通过对传感器的优化和控制策略的改进,可以提高系统的稳定性和可靠性。
系统的自诊断和故障检测功能也能够提高系统的使用寿命和维护效率。
对系统进行仿真分析和实际测试,可以评估系统的性能指标并进行优化,以满足用户的需求。
汽车车窗智能防夹系统的设计需要考虑传感器的选择和布置、控制方式的选择和优化,以及系统的自适应和自诊断功能等方面。
通过优化设计,可以提高系统的感知能力、控制精度和安全性,为乘客提供更加安全和舒适的使用体验。
一种轿车电动车窗防夹控制系统设计张昕1, 李昌刚2, 胡俊杰2, 汪永斌2(1. 浙江万里学院智能控制研究所, 浙江宁波 315100; 2. 浙江万里学院电子信息学院, 浙江宁波 315100 摘要:为解决汽车电动车窗的防夹设计问题, 提出一种新的基于霍尔传感器和车窗电机电流检测的汽车车窗防夹系统设计方案。
该方案采用霍尔传感器的脉冲信号数检测车窗位置, 并设计了一种在车窗上升期间利用电机电流变化来判断车窗是否遇到障碍物及相应操作的控制算法。
最后基于英飞凌XC164CS 硬件平台和 C/O S - 实时操作系统软件平台实现了该设计方案。
试验检测数据表明, 该系统具有良好的防夹功能。
关键词:电动车窗; 防夹; 车门控制系统; 霍尔传感器中图分类号:T N710-34 文献标识码:A 文章编号:1004-373X(2010 17-0169-04Design of Ant-i pinch Power Window C ontrol System for CarsZHA N G X in 1, L I Chang -g ang 2, H U Jun -jie 2, W AN G Y ong -bin 2(1. Inst i t ut e o f Int ell ig ent Control, Zhej iang Wanli Universi t y, Ningbo 315100, China;2. Fa c ulty o f Electroni c &Informa tion Eng i neeri ng, Zhejiang Wanli U niversity , N i ngbo 315100, Chi naAbstract :In order to so lv e the ant-i pinch problem o f t he pow er window for car s, a no vel ant-i pinch solution based o n the Hall senso r and cur rent detect ion of w indow s' moto r is pr esented. T he impulse signals of the H all senso r are ado pt ed to detect the position of the w indo w. A ccording to t he chang e o f the detected curr ent w hile the w indow lifting , a contro l alg or ithm which is used to judg e whether t he window is blocked. Finally, the desig n is realized based o n Infineo n XC164CS har dw are platform and C/O S -I I rea-l time operating system so ftwar e platfo rm. T he t esting r esults indicate that the ant-i pinch system has g ood w orking per for mance.Keywords :po wer w indow ; ant-i pinch; doo r contro l system; Hall sensor收稿日期:2010-03-13基金项目:浙江省科技厅国际合作项目(2009C34023 ; 宁波市国际合作项目(2008B10043 ; 宁波市工业攻关项目(2006B1000380 引言随着现代汽车电子技术的进步, 汽车内传统的零部件及总成也在向机电一体化发展[1]。
汽车中大量应用的电子设备, 不仅提高了汽车的舒适性, 也对汽车的安全性提出了新的要求。
为了方便驾驶员和乘客, 大量汽车采用电动车窗, 许多电动车窗都不具有防夹功能, 容易造成对乘员尤其是儿童的伤害。
美国交通部颁布了针对电动车窗开关系统的法规FMV SS118, 对车窗防夹相关参数做出了明确规定[2], 并规定在2008年10月1日之后在北美出售的轿车和小型货车都必须强制执行该规定。
虽然我国还没有就该问题做出法律上的规定, 但为安全起见, 开发具有防夹功能的车窗控制模块是完全必要的。
参考了文献[3-5]后, 本文的防夹设计方案采用将霍尔传感器检测电机转速和检测电机电流变化情况结合起来实现防夹功能, 该方案避免了车窗防夹系统易受外界环境影响的缺陷, 确保防夹效果可靠, 成本较低, 可以不必改动传统车门的生产工艺, 在改造电动车窗无防夹功能的老车型时, 可以不改变现在已成型的汽车车门的机械结构和电路结构, 只需替换电动车窗升降控制器, 十分方便。
1 电动车窗防夹设计方案所谓防夹, 就是指在电动车窗上升过程中夹住物体并达到一定力度后, 让电动车窗自动停止或回落, 用以防止物体(尤其是人体被夹伤。
车窗的升降过程中, 只有车窗上升阶段需要进行防夹控制, 所定义的防夹区为从离电动车窗玻璃无障碍上升运动的最大位置(顶端 4~200m m 的区域。
该定义符合欧洲74/60/EEC 和美国FM VSS118的相关要求[6]。
只有在防夹区域才启动防夹功能。
所以防夹设计首先应该确定车窗的当前位置。
1. 1 车窗位置的确定车窗控制电机的旋转会带动钢丝绳的运动, 从而控169现代电子技术 2010年第17期总第328期电子技术应用制车窗的上下移动。
在车窗移动过程中, 电机转动的圈数和车窗的运动距离成正比, 电机转子转动一周, 会使霍尔传感器产生方波脉冲信号。
当车窗从最低位置升到顶部过程中, 可以通过M CU 对霍尔传感器输出的脉冲信号进行计数, 从车窗的最底端到最顶端, 上下反复3次, 取其平均值n th , 作为标定的基准, 并记录在E2PROM 中。
之后, 软件控制从车窗的最底端位置开始运行(此时为人工操控, 车窗运行到最底端, 电机堵转 , 且计数从零开始, 上升过程根据当前的计数值进行加计数, 下降过程根据当前的计数值进行减计数。
因此, 通过霍尔传感器的脉冲输出及计数方案可实时确定车窗的当前位置, 并根据欧洲74/60/EEC 和美国FM VSS118标准的规定确定车窗是否在防夹区域。
对于本系统, 测量过程中脉冲计数的误差可忽略不计, 对于长期运行中可能造成的误差可用定期标定的方式加以解决。
1. 2 防夹方案的确定本系统采用检测电机电枢电流方式来确定车窗在上升过程中是否遇到障碍物, 方案在具体实施过程中要解决如下问题:(1 确定防夹区域及车窗位置。
遵照欧洲74/60/EEC 和美国FM VSS118标准确定出相应的防夹区域及车窗位置。
(2 防夹时的电机电枢电流阈值i th 的确定, 即在防夹区域内电流值上升到所设定的阈值后即认为遇到障碍物, 启动车窗防夹功能。
这里存在的问题是:车窗按键刚刚按下(无论是上升或下降 , 车窗电机刚刚启动时, 由于电机的反电动势还没有建立, 因而电流会有短时间的较大幅值, 这时的电流幅值往往比所设定的防夹电流阈值还要大, 需要将这种电流幅值较大的状态和在车窗上升过程中遇到障碍物产生的电机堵转电流区分开来。
车窗电机启动后延时50ms 后, 再进行电流检测, 这样可以避免电机启动初期电流瞬时过冲对防夹电流阈值设定的影响。
实际设计中, 应用一块可用于诊断功能的中央控制器, 配合武汉吉阳光电公司生产的USB -CAN200工具, 将运行过程中的数据反馈到PC 机上, 以Ex cel 表格方式呈现, 并可绘出图形, 进而方便地定出阈值i th , 并通过多次运行试验确定合适的阈值。
(3 M CU 和功率驱动器件的选取。
防夹方案中涉及到较多的实时检测和实时计算, 要求M CU 的计算能力较高, 方案中软件的实现基于移植 C/OS - 实时操作系统方案, 因此选择欧洲车系上流行的、性能较高的英飞凌XC164CS MCU , 功率驱动芯片选择具有故障诊断功能的BT S781芯片。
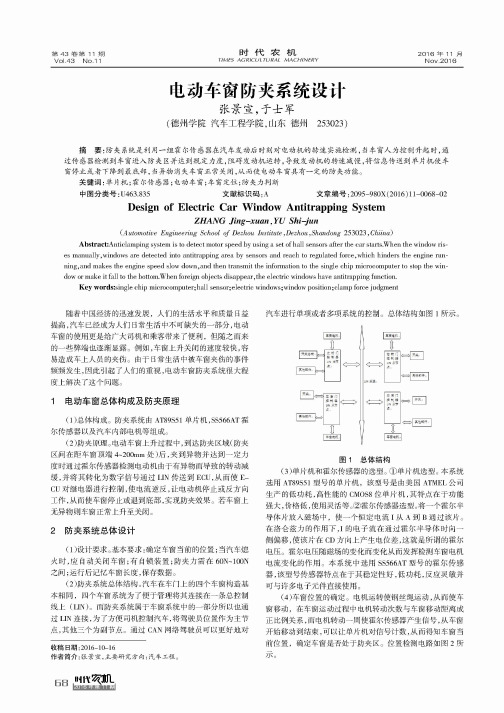
2 防夹系统硬件设计车门控制系统包括电动车窗控制系统和电动后视镜控制系统两部分[7], 防夹电动车窗是车门控制系统的一个子模块, 在整个车门控制系统中, 采用了一种总体分布, 局部集中式的控制方案, 如图1所示。
即将左侧前后两个车门的控制作为一个ECU 模块, 右侧前后两个车门的控制作为另一个ECU 模块, 两个模块之间以及模块与中央控制器之间均以CAN总线方式连接。
图1 车门控制系统(含车窗子模块框图防夹系统硬件设计以BTS781为核心, 通过ST 1, ST2, IH 1, IH 2, IL1, IL2端口和微控制器XC164CS 芯片连接, 接收微控制器发出的指令, 来控制车窗的升降。
通过在全桥驱动芯片BT S781的2和13号引脚上串接一个5m 的电阻R 37来检测电机电枢电流变化, 经过低通滤波和放大, 送入M CU 的A/D 端口进行采样, 如图2所示。
图2 车窗电机电枢电流检测汽车电子张昕等:一种轿车电动车窗防夹控制系统设计车窗位置测定采用霍尔传感器输出脉冲计数的方式实现。
采用英飞凌TLE4923霍尔传感器, 直接输出方波信号[8], 经低通滤波, 将脉冲信号输入M CU 对其进行计数, 进而确定车窗的当前位置, 如图3所示。
图3 霍尔位置检测电路3 软件设计系统的软件设计不但要考虑控制的方便性, 也要考虑将来功能的扩展性[9]。
因此, 本系统的软件设计基于实时操作系统, 即首先将 C/OS - 实时操作系统内核移植到XC164CS M CU 上, 之后将防夹车窗控制以其中的一个任务的方式添加上去。
3.1 C/OS - 实时操作系统内核移植所做的移植, 就是将 C/OS - 实时内核移植到XC164CS 微控制器上[10]。
由于C/OS - 在读写处理器寄存器时只能通过汇编语言来实现, 所以一些与处理器相关的代码要用汇编语言写, 但大部分的 C/OS - 代码用C 语言编写。
移植工作主要使C/OS - 正确定义和使用XC164CS 。
具体请参考本文作者撰写的文章, 此处不再赘述。
3. 2 防夹电动车窗软件设计在所设计的硬件平台上将 C/OS - 实时操作系统移植后, 将防夹电动车窗控制以任务方式加入, 并参照前文内容实现防夹功能, 其流程图如图4所示。
控制器XC164CS 上电启动时, 从E 2PROM 中读取n th , i th 等初始数据, 检测电源电压, 当电压值平稳后, 读取E 2PROM 中存储的车窗位置, 然后读取按键输入, 如果有升降车窗操作, 就设置对应的开关信号来驱动芯片BT S781中的M OS 管T 1, T 2, T 3, T 4。