阈值分割法代码
- 格式:docx
- 大小:12.30 KB
- 文档页数:2
图像处理中的阈值分割算法图像处理是一种广泛应用的技术,涉及到计算机视觉、人工智能、医学影像处理等领域。
而阈值分割算法是图像处理中的基础算法之一,其应用广泛,包括图像二值化、图像增强、图像去噪等等。
阈值分割算法的原理阈值分割算法本质上是将图像分为两个部分,其中一部分是我们希望得到的目标图像,另一部分则是我们不需要的背景或者噪声。
阈值本身就是用于区分这两个部分的分类标准,当像素值高于阈值时,该像素点被分类为目标图像,而低于阈值时则被分类为背景或噪声。
通常情况下,我们需要调整阈值的大小来达到最佳的效果。
常见的阈值分割算法下面我们来介绍几种常用的阈值分割算法:1. 简单阈值法简单阈值法是最基本的阈值分割算法,其步骤非常简单:首先选择一个阈值,将图像分为两类,然后计算每类的像素平均值,再将两者的平均值求平均作为一个新的阈值,不断迭代,直到得到一个稳定的结果。
这种方法简单易行,但是对于噪声敏感,效果不稳定。
2. Otsu算法Otsu算法是一种自适应阈值分割算法,也是比较常见的一种算法。
它的基本思路是寻找一个最佳的阈值,使得目标图像和背景图像的类内方差最小,而类间方差最大。
3. 自适应阈值法自适应阈值法是一种基于局部图像特征的分割方法,其思路是将图像分成若干个子区域,然后在子区域内分别计算阈值,最后通过叠加的方式得到整张图像的最终阈值。
这种算法适用于逐渐变化的光照情况下的图像分割。
4. 谷底阈值法谷底阈值法是一种基于图像梯度的分割方法,其思路是通过找到图像梯度的最大值和最小值来确定阈值位置。
该算法适用于较大的、均匀亮度的图像分割。
总结阈值分割算法是一种广泛应用的图像处理方法,其优点是简单易行,但是缺点也很明显,对于噪声和不稳定的光照情况下准确性有限。
因此,在应用中需要根据具体情况选择对应的算法,以达到最佳的图像分割效果。
1.图像反转MATLAB 程序实现如下:I=imread('xian.bmp');J=double(I);J=-J+(256-1);% 图像反转线性变换H=uint8(J);subplot(1,2,1),imshow(I);subplot(1,2,2),imshow(H);2.灰度线性变换MATLAB 程序实现如下:I=imread('xian.bmp');subplot(2,2,1),imshow(I);title(' 原始图像 ');axis([50,250,50,200]);axis on;% 显示坐标系I1=rgb2gray(I);subplot(2,2,2),imshow(I1);title(' 灰度图像 ');axis([50,250,50,200]);axis on;% 显示坐标系J=imadjust(I1,[0.1 0.5],[]); %局部拉伸,把[0.1 0.5]内的灰度拉伸为[0 1]subplot(2,2,3),imshow(J);title(' 线性变换图像 [0.1 0.5]');axis([50,250,50,200]);grid on;% 显示网格线axis on;% 显示坐标系K=imadjust(I1,[0.30.7],[]);% 局部拉伸,把[0.30.7] 内的灰度拉伸为 [0 1]subplot(2,2,4),imshow(K);title(' 线性变换图像 [0.3 0.7]');axis([50,250,50,200]);grid on;% 显示网格线axis on;% 显示坐标系3. 非线性变换MATLAB 程序实现如下:I=imread('xian.bmp');I1=rgb2gray(I);subplot(1,2,1),imshow(I1);title(' 灰度图像 ');axis([50,250,50,200]);grid on;% 显示网格线axis on;% 显示坐标系J=double(I1);J=40*(log(J+1));H=uint8(J);subplot(1,2,2),imshow(H);title(' 对数变换图像 ');axis([50,250,50,200]);grid on;% 显示网格线axis on;% 显示坐标系4. 直方图均衡化MATLAB 程序实现如下:I=imread('xian.bmp');I=rgb2gray(I);figure;subplot(2,2,1);imshow(I);subplot(2,2,2);imhist(I);I1=histeq(I);figure;subplot(2,2,1);imshow(I1);subplot(2,2,2);imhist(I1);5.线性平滑滤波器用 MATLAB 实现领域平均法抑制噪声程序:I=imread('xian.bmp');subplot(231)imshow(I)title(' 原始图像 ')I=rgb2gray(I);I1=imnoise(I,'salt & pepper',0.02);subplot(232)imshow(I1)title(' 添加椒盐噪声的图像')k1=filter2(fspecial('average',3),I1)/255;% 进行 3*3 模板平滑滤波k2=filter2(fspecial('average',5),I1)/255;% 进行 5*5 模板平滑滤波k3=filter2(fspecial('average',7),I1)/255;% 进行 7*7 模板平滑滤波k4=filter2(fspecial('average',9),I1)/255;% 进行 9*9 模板平滑滤波subplot(233),imshow(k1);title('3*3 模板平滑滤波 ');subplot(234),imshow(k2);title('5*5 模板平滑滤波 ');subplot(235),imshow(k3);title('7*7 模板平滑滤波 ');subplot(236),imshow(k4);title('9*9 模板平滑滤波 ');6.中值滤波器用 MATLAB 实现中值滤波程序如下:I=imread('xian.bmp');I=rgb2gray(I);J=imnoise(I,'salt&pepper',0.02);subplot(231),imshow(I);title(' 原图像 ');subplot(232),imshow(J);title(' 添加椒盐噪声图像'); k1=medfilt2(J);% 进行 3*3 模板中值滤波k2=medfilt2(J,[5,5]);% 进行 5*5 模板中值滤波k3=medfilt2(J,[7,7]);% 进行 7*7 模板中值滤波k4=medfilt2(J,[9,9]);% 进行 9*9 模板中值滤波subplot(233),imshow(k1);title('3*3 模板中值滤波 '); subplot(234),imshow(k2);title('5*5 模板中值滤波'); subplot(235),imshow(k3);title('7*7 模板中值滤波 '); subplot(236),imshow(k4);title('9*9 模板中值滤波 '); 7.用 Sobel 算子和拉普拉斯对图像锐化:I=imread('xian.bmp');subplot(2,2,1),imshow(I);title(' 原始图像 ');axis([50,250,50,200]);grid on;% 显示网格线axis on;% 显示坐标系I1=im2bw(I);subplot(2,2,2),imshow(I1);title(' 二值图像');axis([50,250,50,200]);grid on; axis on;% 显示网格线%显示坐标系H=fspecial('sobel'); J=filter2(H,I1);% 选择 sobel 算子% 卷积运算subplot(2,2,3),imshow(J);title('sobel 算子锐化图像 ');axis([50,250,50,200]);grid on;% 显示网格线axis on;% 显示坐标系h=[0 1 0,1 -4 1,0 1 0];% 拉普拉斯算子J1=conv2(I1,h,'same');% 卷积运算subplot(2,2,4),imshow(J1);title(' 拉普拉斯算子锐化图像 ');axis([50,250,50,200]);grid on;% 显示网格线axis on;% 显示坐标系8.梯度算子检测边缘用 MATLAB 实现如下:I=imread('xian.bmp');subplot(2,3,1);imshow(I);title(' 原始图像 ');axis([50,250,50,200]);grid on;% 显示网格线axis on;% 显示坐标系I1=im2bw(I);subplot(2,3,2);imshow(I1);title(' 二值图像 ');axis([50,250,50,200]);grid on;% 显示网格线axis on;% 显示坐标系I2=edge(I1,'roberts');figure;subplot(2,3,3);imshow(I2);title('roberts算子分割结果');axis([50,250,50,200]);grid on;% 显示网格线axis on;% 显示坐标系I3=edge(I1,'sobel');subplot(2,3,4);imshow(I3);title('sobel算子分割结果 ');axis([50,250,50,200]);grid on;% 显示网格线axis on;% 显示坐标系I4=edge(I1,'Prewitt');subplot(2,3,5);imshow(I4);title('Prewitt算子分割结果 ');axis([50,250,50,200]);grid on;% 显示网格线axis on;% 显示坐标系9.LOG 算子检测边缘用 MATLAB 程序实现如下:I=imread('xian.bmp');subplot(2,2,1);imshow(I);title(' 原始图像 ');I1=rgb2gray(I);subplot(2,2,2);imshow(I1);title(' 灰度图像 ');I2=edge(I1,'log');subplot(2,2,3);imshow(I2);title('log 算子分割结果 '); 10.Canny 算子检测边缘用 MATLAB 程序实现如下:I=imread('xian.bmp'); subplot(2,2,1);imshow(I);title(' 原始图像 ')I1=rgb2gray(I);subplot(2,2,2);imshow(I1);title(' 灰度图像 ');I2=edge(I1,'canny'); subplot(2,2,3);imshow(I2);title('canny 算子分割结果 ');11. 边界跟踪(bwtraceboundary函数)clcclear allI=imread('xian.bmp');figureimshow(I);title('原始图像');I1=rgb2gray(I); threshold=graythresh(I1);% 将彩色图像转化灰度图像% 计算将灰度图像转化为二值图像所需的门限BW=im2bw(I1,threshold);% 将灰度图像转化为二值图像figureimshow(BW);title('二值图像');dim=size(BW);col=round(dim(2)/2)-90;% 计算起始点列坐标row=find(BW(:,col),1);% 计算起始点行坐标connectivity=8;num_points=180;contour=bwtraceboundary(BW,[row,col],'N',connectivity,num_p oints);%提取边界figureimshow(I1);hold on;plot(contour(:,2),contour(:,1), 'g','LineWidth' ,2); title(' 边界跟踪图像 ');12.Hough 变换I= imread('xian.bmp');rotI=rgb2gray(I);subplot(2,2,1);imshow(rotI);title(' 灰度图像 ');axis([50,250,50,200]);grid on;axis on;BW=edge(rotI,'prewitt');subplot(2,2,2);imshow(BW);title('prewitt算子边缘检测后图像');axis([50,250,50,200]);grid on;axis on;[H,T,R]=hough(BW);subplot(2,2,3);imshow(H,[],'XData',T,'YData',R,'InitialMagnification','fit'); title(' 霍夫变换图 ');xlabel('\theta'),ylabel('\rho');axis on , axis normal, hold on;P=houghpeaks(H,5,'threshold',ceil(0.3*max(H(:))));x=T(P(:,2));y=R(P(:,1));plot(x,y,'s','color','white');lines=houghlines(BW,T,R,P ,'FillGap',5,'MinLength',7); subplot(2,2,4);,imshow(rotI);title(' 霍夫变换图像检测');axis([50,250,50,200]);grid on;axis on;hold on;max_len=0;for k=1:length(lines)xy=[lines(k).point1;lines(k).point2];plot(xy(:,1),xy(:,2),'LineWidth',2,'Color','green');plot(xy(1,1),xy(1,2),'x','LineWidth',2,'Color','yellow');plot(xy(2,1),xy(2,2),'x','LineWidth',2,'Color','red');len=norm(lines(k).point1-lines(k).point2);if(len>max_len)max_len=len;xy_long=xy;endendplot(xy_long(:,1),xy_long(:,2),'LineWidth',2,'Color','cyan');13.直方图阈值法用 MATLAB 实现直方图阈值法:I=imread('xian.bmp');I1=rgb2gray(I);figure;subplot(2,2,1);imshow(I1);title(' 灰度图像 ')axis([50,250,50,200]);grid on;% 显示网格线axis on;%显示坐标系[m,n]=size(I1);% 测量图像尺寸参数GP=zeros(1,256);% 预创建存放灰度出现概率的向量for k=0:255GP(k+1)=length(find(I1==k))/(m*n);% 计算每级灰度出现的概率,将其存入GP 中相应位置endsubplot(2,2,2),bar(0:255,GP ,'g')% 绘制直方图title(' 灰度直方图 ')xlabel(' 灰度值 ')ylabel(' 出现概率 ')I2=im2bw(I,150/255);subplot(2,2,3),imshow(I2);title(' 阈值 150 的分割图像 ')axis([50,250,50,200]);grid on;% 显示网格线axis on;% 显示坐标系I3=im2bw(I,200/255);%subplot(2,2,4),imshow(I3);title(' 阈值 200 的分割图像 ')axis([50,250,50,200]);grid on;% 显示网格线axis on;% 显示坐标系14. 自动阈值法: Otsu 法用MATLAB 实现 Otsu 算法:clcclear allI=imread('xian.bmp');subplot(1,2,1),imshow(I);title(' 原始图像 ')axis([50,250,50,200]);grid on;% 显示网格线axis on;% 显示坐标系level=graythresh(I);% 确定灰度阈值BW=im2bw(I,level);subplot(1,2,2),imshow(BW);title('Otsu 法阈值分割图像 ')axis([50,250,50,200]);grid on;% 显示网格线axis on;% 显示坐标系15. 膨胀操作I=imread('xian.bmp');% 载入图像I1=rgb2gray(I);subplot(1,2,1);imshow(I1);title(' 灰度图像 ')axis([50,250,50,200]);grid on;% 显示网格线axis on;% 显示坐标系se=strel('disk',1);% 生成圆形结构元素I2=imdilate(I1,se);% 用生成的结构元素对图像进行膨胀subplot(1,2,2);imshow(I2);title(' 膨胀后图像 ');axis([50,250,50,200]);grid on;% 显示网格线axis on;% 显示坐标系16. 腐蚀操作MATLAB 实现腐蚀操作I=imread('xian.bmp');% 载入图像I1=rgb2gray(I);subplot(1,2,1);imshow(I1);title(' 灰度图像 ')axis([50,250,50,200]);grid on;% 显示网格线axis on;% 显示坐标系se=strel('disk',1);% 生成圆形结构元素I2=imerode(I1,se);% 用生成的结构元素对图像进行腐蚀subplot(1,2,2);imshow(I2);title(' 腐蚀后图像 ');axis([50,250,50,200]);grid on;% 显示网格线axis on;% 显示坐标系17.开启和闭合操作用 MATLAB 实现开启和闭合操作I=imread('xian.bmp');% 载入图像subplot(2,2,1),imshow(I);title(' 原始图像 ');axis([50,250,50,200]);axis on;% 显示坐标系I1=rgb2gray(I);subplot(2,2,2),imshow(I1);title(' 灰度图像');axis([50,250,50,200]);axis on;% 显示坐标系se=strel('disk',1);% 采用半径为1的圆作为结构元素I3=imclose(I1,se);% 闭合操作subplot(2,2,3),imshow(I2);title(' 开启运算后图像 ');axis([50,250,50,200]);axis on;% 显示坐标系subplot(2,2,4),imshow(I3);title(' 闭合运算后图像 ');axis([50,250,50,200]);axis on;% 显示坐标系18.开启和闭合组合操作I=imread('xian.bmp');% 载入图像subplot(3,2,1),imshow(I);title(' 原始图像 ');axis([50,250,50,200]);axis on;% 显示坐标系I1=rgb2gray(I);subplot(3,2,2),imshow(I1);title(' 灰度图像 ');axis([50,250,50,200]);axis on;% 显示坐标系se=strel('disk',1);I3=imclose(I1,se);%闭合操作subplot(3,2,3),imshow(I2);title(' 开启运算后图像 ');axis([50,250,50,200]);axis on;% 显示坐标系subplot(3,2,4),imshow(I3);title(' 闭合运算后图像 ');axis([50,250,50,200]);axis on;% 显示坐标系se=strel('disk',1);I4=imopen(I1,se);I5=imclose(I4,se);subplot(3,2,5),imshow(I5);% 开—闭运算图像title(' 开—闭运算图像 ');axis([50,250,50,200]);axis on;% 显示坐标系I6=imclose(I1,se);I7=imopen(I6,se);subplot(3,2,6),imshow(I7);% 闭—开运算图像title(' 闭—开运算图像 ');axis([50,250,50,200]);axis on;% 显示坐标系19. 形态学边界提取利用 MATLAB 实现如下:I=imread('xian.bmp');% 载入图像subplot(1,3,1),imshow(I);title(' 原始图像 ');axis([50,250,50,200]);grid on;% 显示网格线axis on;% 显示坐标系I1=im2bw(I);subplot(1,3,2),imshow(I1);title(' 二值化图像 ');axis([50,250,50,200]);grid on;% 显示网格线axis on;% 显示坐标系I2=bwperim(I1);% 获取区域的周长subplot(1,3,3),imshow(I2);title(' 边界周长的二值图像 ');axis([50,250,50,200]);grid on;axis on;20.形态学骨架提取利用 MATLAB 实现如下:I=imread('xian.bmp'); subplot(2,2,1),imshow(I); title(' 原始图像 ');axis([50,250,50,200]); axis on;I1=im2bw(I);subplot(2,2,2),imshow(I1); title(' 二值图像 ');axis([50,250,50,200]); axis on;I2=bwmorph(I1,'skel',1); subplot(2,2,3),imshow(I2); title('1 次骨架提取 ');axis([50,250,50,200]); axis on;I3=bwmorph(I1,'skel',2); subplot(2,2,4),imshow(I3); title('2 次骨架提取 ');axis([50,250,50,200]); axis on;21.直接提取四个顶点坐标I = imread('xian.bmp');I = I(:,:,1);BW=im2bw(I);figureimshow(~BW)[x,y]=getpts。
otsu 双阈值算法Otsu双阈值算法是一种基于图像灰度直方图的自适应阈值分割方法。
它由日本学者大津展之于1979年提出,被广泛应用于图像处理领域。
该算法通过计算图像的类间方差最大值,确定最佳的阈值,实现图像的二值化处理。
Otsu双阈值算法的核心思想是将图像分为背景和前景两部分,使得背景和前景之间的类间方差最大化。
类间方差是指图像的不同部分之间的差异程度,方差越大表示两个部分之间的差异越大。
因此,通过最大化类间方差,可以得到最佳的阈值,将图像分割为背景和前景两部分。
具体实现Otsu算法的步骤如下:1. 首先,计算图像的灰度直方图,即统计图像中每个灰度级别的像素个数。
2. 然后,计算图像的总像素数,用来归一化灰度直方图。
3. 接下来,初始化类间方差的最大值为0,以及最佳阈值为0。
4. 对于每个可能的阈值T,计算两个部分的像素个数和像素值的总和。
5. 根据公式计算类间方差,并更新最大值和最佳阈值。
6. 最后,根据最佳阈值对图像进行二值化处理,将灰度值大于阈值的像素设置为前景,灰度值小于等于阈值的像素设置为背景。
Otsu双阈值算法的优点是自适应性强,能够根据图像的特点自动选择最佳的阈值,适用于各种类型的图像。
它不依赖于先验知识,可以有效地处理光照不均匀、噪声干扰等问题,得到较好的分割结果。
然而,Otsu算法也存在一些限制。
首先,它假设图像的背景和前景之间的灰度级别具有双峰分布,这在某些图像中可能不成立,导致分割效果不佳。
其次,算法对噪声敏感,噪声干扰会影响到灰度直方图的计算结果,进而影响阈值的选择。
此外,Otsu算法只能得到两个阈值,对于复杂的图像分割任务可能不够灵活。
为了克服这些限制,研究者们提出了许多改进的Otsu算法。
例如,基于最大熵的Otsu算法可以处理灰度级别不均匀的图像,基于模糊聚类的Otsu算法可以处理具有模糊边界的图像。
这些改进算法在特定的应用场景下具有更好的效果。
Otsu双阈值算法是一种简单而有效的图像分割方法,通过最大化类间方差来确定最佳阈值,实现图像的二值化处理。
医学图像分割方法汇总本文主要介绍在医学图像分割方面的几种典型算法,详细介绍每种算法的工作原理,通过对具体的医学图像实验来对比每种方法在分割方面的优点和缺点,分析结果产生的原因,从而在后面的实际应用中选择最合适的算法。
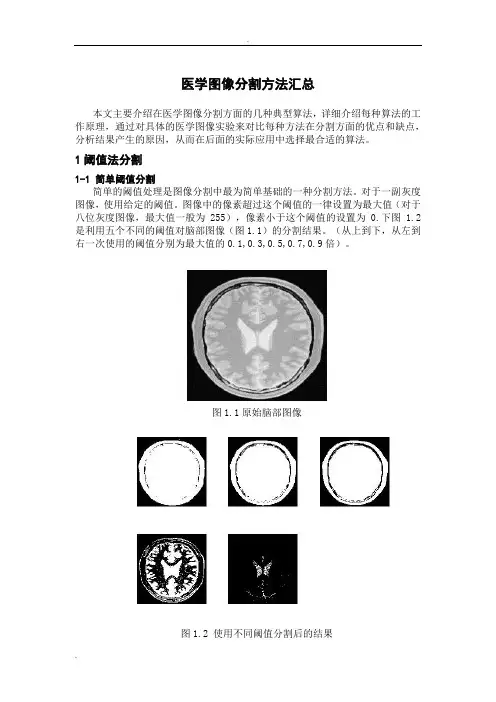
1阈值法分割1-1 简单阈值分割简单的阈值处理是图像分割中最为简单基础的一种分割方法。
对于一副灰度图像,使用给定的阈值。
图像中的像素超过这个阈值的一律设置为最大值(对于八位灰度图像,最大值一般为255),像素小于这个阈值的设置为0.下图 1.2是利用五个不同的阈值对脑部图像(图1.1)的分割结果。
(从上到下,从左到右一次使用的阈值分别为最大值的0.1,0.3,0.5,0.7,0.9倍)。
图1.1原始脑部图像图1.2 使用不同阈值分割后的结果从实验结果来看,使用简单的阈值分割,过程十分简便,原理简单易懂,但是要是得到比较好的分割结果需要进行多次试验。
1-2 otsu阈值分割法Otsu阈值分割法又称大津阈值分割法。
它的原理是对图像所有的像素范围进行遍历(对8位灰度图像来说呢,就是从0遍历到255),找出合适的T(阈值),把原始图像分割成前景图像和背景图像并且两者之间的类方差最大。
原理:对于图像I(x,y),前景(即目标)和背景的分割阈值记作T,属于前景的像素点数占整幅图像的比例记为ω0,其平均灰度μ0;背景像素点数占整幅图像的比例为ω1,其平均灰度为μ1。
图像的总平均灰度记为μ,类间方差记为g。
假设图像的背景较暗,并且图像的大小为M×N,图像中像素的灰度值小于阈值T的像素个数记作N0,像素灰度大于阈值T的像素个数记作N1,则有:ω0=N0/ M×N (1)ω1=N1/ M×N (2)N0+N1=M×N (3)ω0+ω1=1 (4)μ=ω0*μ0+ω1*μ1 (5)g=ω0(μ0-μ)^2+ω1(μ1-μ)^2 (6)将式(5)代入式(6),得到等价公式:g= ω0ω1(μ0-μ1)^2 (7)这就是类间方差找出使得g(类方差)的值到达最大的T(值),就是我们需要的结果。
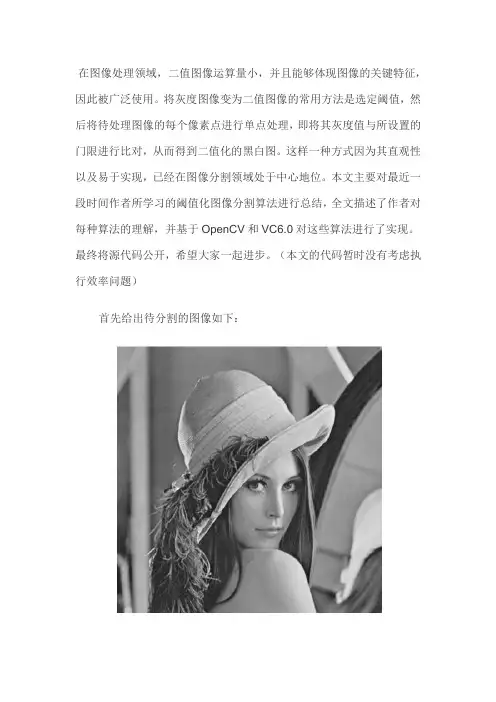
在图像处理领域,二值图像运算量小,并且能够体现图像的关键特征,因此被广泛使用。
将灰度图像变为二值图像的常用方法是选定阈值,然后将待处理图像的每个像素点进行单点处理,即将其灰度值与所设置的门限进行比对,从而得到二值化的黑白图。
这样一种方式因为其直观性以及易于实现,已经在图像分割领域处于中心地位。
本文主要对最近一段时间作者所学习的阈值化图像分割算法进行总结,全文描述了作者对每种算法的理解,并基于OpenCV和VC6.0对这些算法进行了实现。
最终将源代码公开,希望大家一起进步。
(本文的代码暂时没有考虑执行效率问题)首先给出待分割的图像如下:1、Otsu法(最大类间方差法)该算法是日本人Otsu提出的一种动态阈值分割算法。
它的主要思想是按照灰度特性将图像划分为背景和目标2部分,划分依据为选取门限值,使得背景和目标之间的方差最大。
(背景和目标之间的类间方差越大,说明这两部分的差别越大,当部分目标被错划分为背景或部分背景错划分为目标都会导致这两部分差别变小。
因此,使用类间方差最大的分割意味着错分概率最小。
)这是该方法的主要思路。
其主要的实现原理为如下:1)建立图像灰度直方图(共有L个灰度级,每个出现概率为p)2)计算背景和目标的出现概率,计算方法如下:上式中假设t为所选定的阈值,A代表背景(灰度级为0~N),根据直方图中的元素可知,Pa为背景出现的概率,同理B为目标,Pb为目标出现的概率。
3)计算A和B两个区域的类间方差如下:第一个表达式分别计算A和B区域的平均灰度值;第二个表达式计算灰度图像全局的灰度平均值;第三个表达式计算A、B两个区域的类间方差。
4)以上几个步骤计算出了单个灰度值上的类间方差,因此最佳分割门限值应该是图像中能够使得A与B的类间灰度方差最大的灰度值。
在程序中需要对每个出现的灰度值据此进行寻优。
本人的VC实现代码如下。
[cpp]view plaincopyprint?1. /*****************************************************************************2. *3. * \函数名称:4. * OneDimentionOtsu()5. *6. * \输入参数:7. * pGrayMat: 二值图像数据8. * width: 图形尺寸宽度9. * height: 图形尺寸高度10. * nTlreshold: 经过算法处理得到的二值化分割阈值11. * \返回值:12. * 无13. * \函数说明:实现灰度图的二值化分割——最大类间方差法(Otsu算法,俗称大津算法)14. *15. ****************************************************************************/16.17. void CBinarizationDlg::OneDimentionOtsu(CvMat *pGrayMat, int width, int height, BYTE &nThreshold)18. {19. double nHistogram[256]; //灰度直方图20. double dVariance[256]; //类间方差21. int N = height*width; //总像素数22. for(int i=0; i<256; i++)23. {24. nHistogram[i] = 0.0;25. dVariance[i] = 0.0;26. }27. for(i=0; i<height; i++)28. {29. for(int j=0; j<width; j++)30. {31. unsigned char nData = (unsigned char)cvmGet(pGrayMat, i, j);32. nHistogram[nData]++; //建立直方图33. }34. }35. double Pa=0.0; //背景出现概率36. double Pb=0.0; //目标出现概率37. double Wa=0.0; //背景平均灰度值38. double Wb=0.0; //目标平均灰度值39. double W0=0.0; //全局平均灰度值40. double dData1=0.0, dData2=0.0;41. for(i=0; i<256; i++) //计算全局平均灰度42. {43. nHistogram[i] /= N;44. W0 += i*nHistogram[i];45. }46. for(i=0; i<256; i++) //对每个灰度值计算类间方差47. {48. Pa += nHistogram[i];49. Pb = 1-Pa;50. dData1 += i*nHistogram[i];51. dData2 = W0-dData1;52. Wa = dData1/Pa;53. Wb = dData2/Pb;54. dVariance[i] = (Pa*Pb* pow((Wb-Wa), 2));55. }56. //遍历每个方差,求取类间最大方差所对应的灰度值57. double temp=0.0;58. for(i=0; i<256; i++)59. {60. if(dVariance[i]>temp)61. {62. temp = dVariance[i];63. nThreshold = i;64. }65. }66. }阈值分割结果如下图,求解所得的阈值为116.2、一维交叉熵值法这种方法与类间最大方差很相似,是由Li和Lee应用了信息论中熵理论发展而来。
图像处理算法介绍:阈值分割在图像处理时,受外界光线的干扰一般比较大,假如在阈值分割时采用固定阈值,那么在环境改变时分割效果受影响极大,那么为了避免此影响就必须采用动态阈值,自动求出合适的阈值,将目标图像和背景图像分割开来。
图像阈值化分割是一种最常用,同时也是最简单的图像分割方法,它特别适用于目标和背景占据不同灰度级范围的图像。
它不仅可以极大的压缩数据量,而且也大大简化了分析和处理步骤,因此在很多情况下,是进行图像分析、特征提取与模式识别之前的必要的图像预处理过程。
因此,这里美国TEO将简要介绍图像处理算法:阈值分割。
阈值分割法是一种基于区域的图像分割技术,其基本原理是:通过设定不同的特征阈值,把图像像素点分为若干类。
常用的特征包括:直接来自原始图像的灰度或彩色特征;由原始灰度或彩色值变换得到的特征。
设原始图像为f(x,y),按照一定的准则在f(x,y)中找到特征值T,将图像分割为两个部分,当像素点灰度值或彩色值大于T时,则置为A1(其置可为1),小于T时,则置为A0(其置可为0)。
下面是几种常用的阈值分割方法:1、p-分位数法这也是最基础最简单的一种图像分割方法。
该方法使目标或背景的像素比例等于其先验概率来设定阈值,简单高效,但是对于先验概率难于估计的图像却无能为力。
例如,根据先验知识,知道图像目标与背景象素的比例为PO/PB,则可根据此条件直接在图像直方图上找到合适的阈值T,使得f(x,y)>=T的象素为目标,f(x,y)的象素为背景。
2、迭代方法选取阈值初始阈值选取为图像的平均灰度T0,然后用T0将图像的像素点分作两部分,计算两部分各自的平均灰度,小于T0的部分为TA,大于T0的部分为TB。
计算后,将T1 作为新的全局阈值代替T0,重复以上过程,如此迭代,直至TK 收敛,即TK+1=TK 。
经试验比较,对于直方图双峰明显,谷底较深的图像,迭代方法可以较快地获得满意结果。
但是对于直方图双峰不明显,或图像目标和背景比例差异悬殊,迭代法所选取的阈值不如最大类间方差法。
1.课程设计的目的(1)使学生通过实验体会一些主要的分割算子对图像处理的效果,以及各种因素对分割效果的影响(2)使用Matlab软件进行图像的分割(3)能够进行自行评价各主要算子在无噪声条件下和噪声条件下的分割性能(4)能够掌握分割条件(阈值等)的选择(5)完成规定图像的处理并要求正确评价处理结果,能够从理论上做出合理的解释2.课程设计的要求(1)能对图像文件(bmp,jpg,tiff,gif)进行打开,保存,退出等功能操作(2)包含功能模块:图像的边缘检测(使用不同梯度算子和拉普拉斯算子) (3)封闭轮廓边界(4)区域分割算法:阈值分割,区域生长等3.前言3.1图像阈值分割技术基本原理所谓图像分割是指根据灰度、彩色、空间纹理、几何形状等特征把图像划分成若干个互不相交的区域,使得这些特征在同一区域内,表现出一致性或相似性,而在不同区域间表现出明显的不同。
简单的讲,就是在一幅图像中,把目标从背景中分离出来,以便于进一步处理。
图像分割是图像处理与计算机视觉领域低层次视觉中最为基础和重要的领域之一,它是对图像进行视觉分析和模式识别的基本前提。
同时它也是一个经典难题,到目前为止既不存在一种通用的图像分割方法,也不存在一种判断是否分割成功的客观标准]5[。
在对图像的研究和应用中,人们往往仅对图像中的某些部分感兴趣,这些部分称为目标或前景(其他部分称为背景),他们一般对应图像中特定的、具有独特性质的区域。
为了辨识和分析目标,需要将他们分离提取出来,在此基础上才有可能对目标进一步利用。
图像分割就是指把图像分成格局特性的区域并提取出感兴趣目标的技术和过程。
这里特性可以是象素的灰度、颜色、纹理等,预先定义的目标可以对应单个区域,也可以对应多个区域。
现有的图像分割算法有:阈值分割、边缘检测和区域提取法。
本文着重研究基于阈值法的图像分割技术。
若图像中目标和背景具有不同的灰度集合:目标灰度集合与背景灰度集合,且两个灰度集合可用一个灰度级阈值T进行分割。
roi提取方法ROI (Region of Interest),即感兴趣区域,在图像处理中指定区域内的特定对象或目标,包括对象的轮廓、边缘和纹理等特征。
ROI提取方法因应用场景和需求不同而有所区别,以下列举几种常见的ROI提取方法。
1. 阈值分割法阈值分割法是指将图像分成相应的对象和背景两部分。
根据阈值分割法,将灰度值小于某个固定值的像素灰色预设为1,将灰度值大于某个固定值的像素灰度预设为0。
灰度值介于这两个固定值之间的像素则根据具体应用情况进行判断。
这样,就能将感兴趣区域中的目标从背景中分离出来,进而提取ROI。
2. 边缘检测法边缘检测法是指在图像中检测出目标对象的轮廓和边缘位置的方法。
常用的边缘检测方法有Sobel算子、Canny算子和Laplacian算子。
这些算子可以在图像中检测出边界,从而提取ROI。
3. 区域生长法区域生长法是指从图像中的某一点开始,逐步生长形成目标对象的一种方法。
该方法需要指定生长的基准点,以及生长的规则。
生长的规则可以是基于像素灰度值相似性、空间接近度等指标来判断像素是否应该被加入到ROI中。
该方法可以在不需要提前知道目标区域形状的情况下,自动生长提取ROI。
4. 基于模板匹配的方法对于某些具有特定形状的目标,可以通过在图像中搜索相应的模板来提取ROI。
该方法需要事先准备好一个与目标形状相匹配的模板,通过在图像中搜索相似区域,可以将目标从背景中提取出来。
总之,ROI提取方法相对较为复杂,需要根据具体需求选择合适的方法。
常用的方法有阈值分割法、边缘检测法、区域生长法和基于模板匹配的方法等。
在实际应用中,需要针对具体情况进行选择和优化。
ostu法计算阈值OSTU法是一种常用的图像分割方法,用于将图像分成两个部分:前景和背景。
本文将介绍OSTU法的原理和计算阈值的步骤。
一、OSTU法的原理OSTU法是基于图像的灰度直方图的分析来确定阈值的。
它的基本思想是使得图像的前景和背景之间的类间方差最大化,即使得前景和背景之间的差异最大化。
二、计算阈值的步骤1. 首先,读取图像并将其转换为灰度图像。
通过将彩色图像转换为灰度图像,可以简化计算并减少计算量。
2. 然后,计算灰度图像的直方图。
直方图表示了图像中每个灰度级的像素数量。
3. 接下来,计算每个可能的阈值下的类内方差。
类内方差是指在某个阈值下,将图像分成前景和背景两部分后,前景和背景内部的像素灰度值的方差之和。
4. 然后,计算每个可能的阈值下的类间方差。
类间方差是指在某个阈值下,将图像分成前景和背景两部分后,前景和背景之间的像素灰度值的方差。
5. 最后,选取使得类间方差最大化的阈值作为最终的分割阈值。
三、OSTU法计算阈值的优势OSTU法计算阈值的优势在于它能够自动选择最佳的阈值,而无需用户进行手动调整。
这一点尤其适用于大量图像的处理和分割任务。
四、OSTU法的应用领域OSTU法广泛应用于图像处理和计算机视觉领域。
例如,它可以用于图像分割、边缘检测、目标识别等任务中。
在医学影像领域,OSTU法也常用于肿瘤分割、血管分割等应用中。
五、OSTU法的局限性虽然OSTU法在很多情况下表现良好,但它也有一些局限性。
首先,OSTU法假设图像的前景和背景之间的差异是明显的,但在一些复杂的图像场景中,前景和背景之间的差异可能较小。
其次,OSTU 法对噪声敏感,当图像包含大量噪声时,OSTU法可能产生错误的分割结果。
六、总结OSTU法是一种常用的图像分割方法,通过使得图像的前景和背景之间的类间方差最大化来确定阈值。
它具有自动选择最佳阈值的优势,并广泛应用于图像处理和计算机视觉领域。
然而,OSTU法也有一些局限性,需要根据具体的应用场景进行选择和调整。
基于OpenCV实现图像分割本⽂实例为⼤家分享了基于OpenCV实现图像分割的具体代码,供⼤家参考,具体内容如下1、图像阈值化源代码:#include "opencv2/highgui/highgui.hpp"#include "opencv2/imgproc/imgproc.hpp"#include <iostream>using namespace std;using namespace cv;int thresholds=50;int model=2;Mat image,srcimage;void track(int ,void *){Mat result;threshold(srcimage,result,thresholds,255,CV_THRESH_BINARY);//imshow("原图",result);if(model==0){threshold(srcimage,result,thresholds,255,CV_THRESH_BINARY);imshow("分割",result);}if(model==1){threshold(srcimage,result,thresholds,255,THRESH_BINARY_INV);imshow("分割",result);}if(model==2){threshold(srcimage,result,thresholds,255,THRESH_TRUNC);imshow("分割",result);}if(model==3){threshold(srcimage,result,thresholds,255,THRESH_TOZERO);imshow("分割",result);}if(model==4){threshold(srcimage,result,thresholds,255,THRESH_TOZERO_INV);imshow("分割",result);}}int main(){image=imread("2.2.tif");if(!image.data){return 0;}cvtColor(image,srcimage,CV_BGR2GRAY);namedWindow("分割",WINDOW_AUTOSIZE);cv::createTrackbar("阈a值:","分割",&thresholds,255,track);cv::createTrackbar("模式:","分割",&model,4,track);track(thresholds,0);track(model,0);waitKey(0);return 0;}实现结果:2、阈值处理//阈值处理#include "opencv2/core/core.hpp"#include "opencv2/highgui/highgui.hpp"#include "opencv2/imgproc/imgproc.hpp"using namespace cv;using namespace std;int main(){printf("键盘按键ESC--退出程序");Mat g_srcImage = imread("1.tif",0);if(!g_srcImage.data){printf("读取图⽚失败");}imshow("原始图",g_srcImage);//⼤津法阈值分割显⽰/*⼤津法,简称OTSU.它是按图像的灰度特性,将图像分成背景和⽬标2部分。
Halcon阈值化算⼦dual_threshold和var_threshold的理解Halcon中阈值⼆值化的算⼦众多,通常⽤得最多的有threshold、binary_threshold、dyn_threshold等。
threshold是最简单的阈值分割算⼦,理解最为简单;binary_threshold是⾃动阈值算⼦,它可以⾃动选出暗(dark)的区域,或者⾃动选出亮(light)的区域,理解起来也没有难度。
动态阈值算⼦dyn_threshold理解起来稍微复杂⼀点,使⽤dyn_threshold算⼦的步骤基本是这样的:①将原图进⾏滤波平滑处理。
②⽤原图和平滑后的图逐个像素做⽐较,它可以根据参数分割出原图⽐平滑后的图灰度⾼(或者低)若⼲个灰度值的区域。
举例如下:处理程序是这样的:1 read_image (Image, 'C:/Users/happy xia/Desktop/dynPic.png')2mean_image (Image, ImageMean, 9, 9)3 dyn_threshold (Image, ImageMean, RegionDynThresh, 10, 'dark')程序分析:本例中,将图⽚模糊后,点阵字的⿊⾊扩散了,随之就是字的⿊⾊不如原图那么⿊了,那么通过给定的限值“10”和“dark”,就可以将原图⽐模糊后的图暗10个灰阶以上的区域(即⿊⾊⽂字部分)选出来了。
以上所说的三个算⼦并不是本⽂的重点,但却是理解下⾯的两个阈值分割算⼦的准备知识。
1、dual_threshold先看程序和效果图再分析。
1 read_image (Image, 'C:/Users/happy xia/Desktop/2.png')2 dual_threshold (Image, RegionCrossings, 174, 200, 180)dual_threshold(Image : RegionCrossings : MinSize, MinGray, Threshold : )该算⼦签名中:Threshold 表⽰⽤于分割的阈值数值,MinSize表⽰分割出来的区域的最⼩⾯积(即数像素的数⽬个数),MinGray表⽰分割出来的区域对应的原图中图像像素的最⾼灰度不能低于MinGray设定值。
实验图像分割和形态学处理一、实验目的1、掌握图像分割的基本方法。
2、掌握形态学处理的基本方法。
3、学会使用MATLAB编程实现上述方法。
二、实验任务(1)编程实现基于阈值的图像分割方法和边缘检测方法。
(2)编程实现膨胀、腐蚀方法。
(3)编程实现开运算和闭运算的方法。
(4)编程实现提取骨架和细化的方法。
三、实验配套的主要仪器设备及台(套)数教师示范用投影仪一台微型计算机每个学生一台四、报告要求记录每一步的实验过程。
五、实验记录5.1阈值图像分割方法1——点检测5.1.1程序clccleardata = imread('lianzipoint.jpg');w = [-1 -1 -1; -1 8 -1; -1 -1 -1]g =abs(imfilter(double(data),w));t =max(g(:));g1=(g>=t);[m n]=find(g1)figureimshow(data)hold onplot(n,m,'ro')g1=(g>=t-200);[m n]=find(g1)figureimshow(data)hold onplot(n,m,'ro')g1=(g>=t-800);[m n]=find(g1)figureimshow(data)hold onplot(n,m,'ro')5.1.2 效果分析:随着阈值的减小,所检测出的点越来越多5.2 阈值分割方法2——线检测5.2.1程序clccleardata = imread('xian.jpg');subplot(221),imshow(data);title('检测指定方向线的原始图像');w = [2 -1 -1; -1 2 -1; -1 -1 2];g =abs(imfilter(double(data),w));subplot(222),imshow(g,[])title('使用-45度检测器处理后的图像');gtop = g(1:40,1:40);gtop = pixeldup(gtop,4);%piceldup函数是将图片放大相应倍数subplot(223),imshow(gtop,[])title('-45度检测后左上角放大图');gbot = g(end-40:end,end-40:end);gbot = pixeldup(gbot,4);subplot(224),imshow(gbot,[])title('-45度检测后右下角后放大图');5.2.2 处理效果分析:-45度方向上的直线,经过处理后效果明显,其他方向上的线比较模糊。
阈值分割1/*===============================图像分割=====================================*/2/*---------------------------------------------------------------------------*/3/*手动设置阀值*/4 IplImage* binaryImg = cvCreateImage(cvSize(w, h),IPL_DEPTH_8U, 1);5 cvThreshold(smoothImgGauss,binaryImg,71,255,CV_THRESH_BINARY);6 cvNamedWindow("cvThreshold", CV_WINDOW_AUTOSIZE );7 cvShowImage( "cvThreshold", binaryImg );8//cvReleaseImage(&binaryImg);9 /*---------------------------------------------------------------------------*/10/*自适应阀值 //计算像域邻域的平均灰度,来决定二值化的值*/11 IplImage* adThresImg = cvCreateImage(cvSize(w, h),IPL_DEPTH_8U, 1);12double max_value=255;13intadpative_method=CV_ADAPTIVE_THRESH_GAUSSIAN_C;//CV_ADAPTIVE_THRESH_MEAN_C14int threshold_type=CV_THRESH_BINARY;15int block_size=3;//阈值的象素邻域大小16int offset=5;//窗口尺寸17 cvAdaptiveThreshold(smoothImgGauss,adThresImg,max_value,adpative_method, threshold_type,block_size,offset);18 cvNamedWindow("cvAdaptiveThreshold", CV_WINDOW_AUTOSIZE );19 cvShowImage( "cvAdaptiveThreshold", adThresImg );20 cvReleaseImage(&adThresImg);21/*---------------------------------------------------------------------------*/22/*最大熵阀值分割法*/23IplImage* imgMaxEntropy = cvCreateImage(cvGetSize(imgGrey),IPL_DEPTH_8U,1);24 MaxEntropy(smoothImgGauss,imgMaxEntropy);25 cvNamedWindow("MaxEntroyThreshold", CV_WINDOW_AUTOSIZE );26 cvShowImage( "MaxEntroyThreshold", imgMaxEntropy );//显示图像27 cvReleaseImage(&imgMaxEntropy );28/*---------------------------------------------------------------------------*/29/*基本全局阀值法*/30 IplImage* imgBasicGlobalThreshold =cvCreateImage(cvGetSize(imgGrey),IPL_DEPTH_8U,1);31 cvCopyImage(srcImgGrey,imgBasicGlobalThreshold);32int pg[256],i,thre;33for (i=0;i<256;i++) pg[i]=0;34for (i=0;i<imgBasicGlobalThreshold->imageSize;i++) // 直方图统计35 pg[(BYTE)imgBasicGlobalThreshold->imageData[i]]++;36 thre = BasicGlobalThreshold(pg,0,256); // 确定阈值37 cout<<"The Threshold of this Image in BasicGlobalThresholdis:"<<thre<<endl;//输出显示阀值38 cvThreshold(imgBasicGlobalThreshold,imgBasicGlobalThreshold,thre,255,CV_ THRESH_BINARY); // 二值化39 cvNamedWindow("BasicGlobalThreshold", CV_WINDOW_AUTOSIZE );40 cvShowImage( "BasicGlobalThreshold", imgBasicGlobalThreshold);//显示图像41 cvReleaseImage(&imgBasicGlobalThreshold);42/*---------------------------------------------------------------------------*/43/*OTSU*/44 IplImage* imgOtsu = cvCreateImage(cvGetSize(imgGrey),IPL_DEPTH_8U,1);45 cvCopyImage(srcImgGrey,imgOtsu);46int thre2;47 thre2 = otsu2(imgOtsu);48 cout<<"The Threshold of this Image in Otsu is:"<<thre2<<endl;//输出显示阀值49 cvThreshold(imgOtsu,imgOtsu,thre2,255,CV_THRESH_BINARY); // 二值化50 cvNamedWindow("imgOtsu", CV_WINDOW_AUTOSIZE );51 cvShowImage( "imgOtsu", imgOtsu);//显示图像52 cvReleaseImage(&imgOtsu);53/*---------------------------------------------------------------------------*/54/*上下阀值法:利用正态分布求可信区间*/55IplImage* imgTopDown = cvCreateImage( cvGetSize(imgGrey), IPL_DEPTH_8U, 1);56 cvCopyImage(srcImgGrey,imgTopDown);57 CvScalar mean ,std_dev;//平均值、标准差58double u_threshold,d_threshold;59 cvAvgSdv(imgTopDown,&mean,&std_dev,NULL);60 u_threshold = mean.val[0] +2.5* std_dev.val[0];//上阀值61 d_threshold = mean.val[0] -2.5* std_dev.val[0];//下阀值62//u_threshold = mean + 2.5 * std_dev; //错误63//d_threshold = mean - 2.5 * std_dev;64 cout<<"The TopThreshold of this Image in TopDown is:"<<d_threshold<<endl;//输出显示阀值65 cout<<"The DownThreshold of this Image in TopDown is:"<<u_threshold<<endl; 66cvThreshold(imgTopDown,imgTopDown,d_threshold,u_threshold,CV_THRESH_BINARY_I NV);//上下阀值67 cvNamedWindow("imgTopDown", CV_WINDOW_AUTOSIZE );68 cvShowImage( "imgTopDown", imgTopDown);//显示图像69 cvReleaseImage(&imgTopDown);70/*---------------------------------------------------------------------------*/71/*迭代法*/72IplImage* imgIteration = cvCreateImage( cvGetSize(imgGrey), IPL_DEPTH_8U, 1);73 cvCopyImage(srcImgGrey,imgIteration);74int thre3,nDiffRec;75 thre3 =DetectThreshold(imgIteration, 100, nDiffRec);76 cout<<"The Threshold of this Image in imgIteration is:"<<thre3<<endl;//输出显示阀值77 cvThreshold(imgIteration,imgIteration,thre3,255,CV_THRESH_BINARY_INV);//上下阀值78 cvNamedWindow("imgIteration", CV_WINDOW_AUTOSIZE );79 cvShowImage( "imgIteration", imgIteration);80 cvReleaseImage(&imgIteration);迭代1/*======================================================================*/2/* 迭代法*/3/*======================================================================*/4// nMaxIter:最大迭代次数;nDiffRec:使用给定阀值确定的亮区与暗区平均灰度差异值5int DetectThreshold(IplImage*img, int nMaxIter, int& iDiffRec) //阀值分割:迭代法6 {7//图像信息8int height = img->height;9int width = img->width;10int step = img->widthStep/sizeof(uchar);11 uchar *data = (uchar*)img->imageData;1213 iDiffRec =0;14int F[256]={ 0 }; //直方图数组15int iTotalGray=0;//灰度值和16int iTotalPixel =0;//像素数和17byte bt;//某点的像素值1819 uchar iThrehold,iNewThrehold;//阀值、新阀值20 uchar iMaxGrayValue=0,iMinGrayValue=255;//原图像中的最大灰度值和最小灰度值21 uchar iMeanGrayValue1,iMeanGrayValue2;2223//获取(i,j)的值,存于直方图数组F24for(int i=0;i<width;i++)25 {26for(int j=0;j<height;j++)27 {28 bt = data[i*step+j];29if(bt<iMinGrayValue)30 iMinGrayValue = bt;31if(bt>iMaxGrayValue)32 iMaxGrayValue = bt;33 F[bt]++;34 }35 }3637 iThrehold =0;//38 iNewThrehold = (iMinGrayValue+iMaxGrayValue)/2;//初始阀值39 iDiffRec = iMaxGrayValue - iMinGrayValue;4041for(int a=0;(abs(iThrehold-iNewThrehold)>0.5)&&a<nMaxIter;a++)//迭代中止条件42 {43 iThrehold = iNewThrehold;44//小于当前阀值部分的平均灰度值45for(int i=iMinGrayValue;i<iThrehold;i++)46 {47 iTotalGray += F[i]*i;//F[]存储图像信息48 iTotalPixel += F[i];49 }50 iMeanGrayValue1 = (uchar)(iTotalGray/iTotalPixel);51//大于当前阀值部分的平均灰度值52 iTotalPixel =0;53 iTotalGray =0;54for(int j=iThrehold+1;j<iMaxGrayValue;j++)55 {56 iTotalGray += F[j]*j;//F[]存储图像信息57 iTotalPixel += F[j];58 }59 iMeanGrayValue2 = (uchar)(iTotalGray/iTotalPixel);6061 iNewThrehold = (iMeanGrayValue2+iMeanGrayValue1)/2; //新阀值62 iDiffRec = abs(iMeanGrayValue2 - iMeanGrayValue1);63 }6465//cout<<"The Threshold of this Image in imgIteration is:"<<iThrehold<<endl; 66return iThrehold;67 }68Otsu代码一1/*======================================================================*/2/* OTSU global thresholding routine */3/* takes a 2D unsigned char array pointer, number of rows, and */4/* number of cols in the array. returns the value of the threshold */5/*parameter:6*image --- buffer for image7rows, cols --- size of image8x0, y0, dx, dy --- region of vector used for computing threshold9vvv --- debug option, is 0, no debug information outputed10*/11/*12OTSU 算法可以说是自适应计算单阈值(用来转换灰度图像为二值图像)的简单高效方法。
《数字图像处理》实验9.编写程序,实现阈值分割算法.%9.编写程序,实现阈值分割算法.%这段代码的想法是通过相邻两个像素的平均值的比较来确定阈值的选取。
%通过f(i-1,j-1),f(i,j),f(x,+1,j+1)这三个两两相邻的像素的平均值来比较。
%若两个平均值的差值小于某一个指定的值,这取这个平均值作为新的阈值。
%这样可以把图像中像素比较平缓的部分和像素差别比较大的部分分割开来。
clear;f = imread('text.jpg');f=rgb2gray(f);f = im2double(f);g=f;[m,n] = size(f);x=0.1;%x作为判断的值,两个平均值的差不小于x;d = false;while~dfori=2:m-1%为确保f(i,j)的取值在原图的范围内需要保证的范围。
forj=2:n-1t = (f(i-1,j-1)+f(i,j))/2;%求三个两两相邻的像素点的像素的平均值t1 =(f(i,j)+f(i+1,j+1))/2;d = abs(t1-t)<x;%比较这两个平均值的大小,若两个平均值的差值小于xt1 =(t+t1)/2;%则取这两个值的平均值作为新的阈值;endendendb=im2bw(f,t1);%为方便观察将灰度图像转换成黑白二值图像imshow(b);figure,imshow(g);2.编写程序,实现图像的实数倍放大%放大基于像素放大%图像放大,比如600*600的图像放大到800*800,那么就比原来多了200*200行,%那么这200*200行如果没有进行插值填充,那么就会出现黑白点,以下的代码操作结果就是%这样的。
%以下代码的大概想法是:新建一个矩阵,大小与原图像相同,然后对原图像的每个像素进行放%大%放大的倍数为X。
为了确保图像像素为整数,故使用round函数取整a=imread('text.jpg');imshow(a);b=size(a);%生成一个大小与a相同的矩阵原图大小为199*243;x=2;%放大倍数但这个倍数的大小不能<2,因为大于二之后round %(i/x)的值就会为0.fori=1:1:round(x*199);%round取整,取最近的整数;i的取值从1开始,以x*199%为终点,以1为步长增长。
阈值分割算法
阈值分割算法,指的是一种实现图像分割的算法。
其基本思想是将图
像中的像素按照其灰度值进行分类,利用不同的阈值进行分割,从而
实现对图像的分割。
阈值分割算法常用于图像处理中的目标检测、图
像增强、图像分割等领域。
阈值分割算法具体操作流程如下:
1. 首先将图像灰度化,即将图像中的每个像素转换为对应的灰度值。
2. 对于二值图像,阈值一般取128;对于灰度图像,可使用大津法等方法得到最佳阈值。
3. 对于RGB图像,需要先将其转换为灰度图像后再进行阈值分割。
4. 根据设定的阈值,将灰度图像中的像素分为两类,一类是大于或等
于阈值的像素点,另一类是小于阈值的像素点。
这就实现了图像的分割。
5. 分割后的图像,可以根据需要进行后续处理,如二值化、图像去噪、形态学处理等。
阈值分割算法在实际应用中广泛使用,其优点在于简单易懂、计算量小、可高效实现。
同时,该算法在多个领域都有应用,如医学图像分割、海洋遥感图像分割等。
总之,阈值分割算法是一种在图像处理领域应用广泛的算法。
能够实现图像的快速分割,并可根据需求进行后续处理。