数字调制技术
- 格式:pdf
- 大小:703.03 KB
- 文档页数:3
数字调制技术
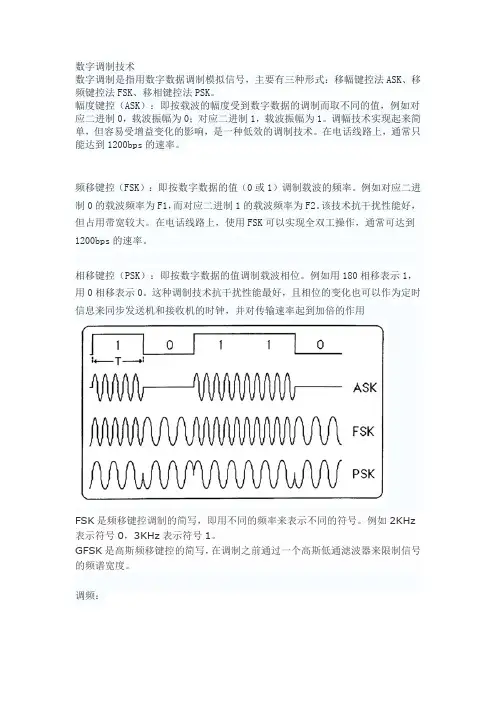
数字调制是指用数字数据调制模拟信号,主要有三种形式:移幅键控法ASK、移频键控法FSK、移相键控法PSK。
幅度键控(ASK):即按载波的幅度受到数字数据的调制而取不同的值,例如对应二进制0,载波振幅为0;对应二进制1,载波振幅为1。
调幅技术实现起来简单,但容易受增益变化的影响,是一种低效的调制技术。
在电话线路上,通常只能达到1200bps的速率。
频移键控(FSK):即按数字数据的值(0或1)调制载波的频率。
例如对应二进制0的载波频率为F1,而对应二进制1的载波频率为F2。
该技术抗干扰性能好,但占用带宽较大。
在电话线路上,使用FSK可以实现全双工操作,通常可达到1200bps的速率。
相移键控(PSK):即按数字数据的值调制载波相位。
例如用180相移表示1,用0相移表示0。
这种调制技术抗干扰性能最好,且相位的变化也可以作为定时信息来同步发送机和接收机的时钟,并对传输速率起到加倍的作用
FSK是频移键控调制的简写,即用不同的频率来表示不同的符号。
例如2KHz 表示符号0,3KHz表示符号1。
GFSK是高斯频移键控的简写,在调制之前通过一个高斯低通滤波器来限制信号的频谱宽度。
调频:
调幅:。

调制技术的应用随着无线通信技术的迅猛发展,调制技术成为了无线通信技术中的重要组成部分。
调制技术是将待传输信息信号与载波进行相互作用,使信息信号可以经过空气、导线等媒介传输。
在现代无线通信领域,调制技术应用广泛,如移动通信、卫星通信、航空通信、广播、电视等等。
本文将介绍调制技术的应用。
一、移动通信移动通信是无线通信领域中最为突出的应用之一,而移动通信中最为重要的调制技术是数字调制。
移动通信中常用的数字调制技术有ASK(振幅调制)、FSK(频移键控)、PSK (相移键控)和QAM(正交振幅调制)等。
数字调制技术通过使用数字信号来信号调制,可以提高信道容量,减少传输误码率,提高通信信号质量,因此其应用十分广泛。
二、卫星通信卫星通信中,调制解调器是重要的组成部分,其主要作用是将要传输的数据进行载波调制,以便于通过卫星传输。
卫星通信中常用的调制技术有BPSK(二进制相移键控)、QPSK (四进制相移键控)和8PSK(八进制相移键控)等。
这些技术具有高频谱效率和低误码率的特点,适用于土地和海洋等不同的地理环境和信息传播需求。
三、航空通信在航空通信中,调制技术逐渐发展为MF、HF、VHF/UHF等各种频段的无线电波通信系统。
调制技术的主要应用在航空导航、气象信息、空中交通管制等方面。
这些系统需要在不同频段和调制方式下进行信息传输,包括调幅、调频以及数字调制等。
这些技术可以提高通信信号的覆盖范围和传输速率,增强通信信号的可靠性和抗干扰性,提高系统的适用性和安全性。
四、广播电视广播电视是调制技术的重要应用领域之一,其主要应用的调制技术有AM(调幅)、FM (调频)和数字调制等。
广播电视中涉及到的信号类型与传输环境都各具特点,需要选择不同的调制技术来适应不同的传播需求,常规广播与电视采用调幅方式传播,而数字广播与电视采用数字调制方式传播。
广播电视的传输距离较远,信号传输可靠性要求高,调制技术在广播电视中的应用显得尤为重要。
数字调制技术数字调制技术调制技术概述调制基础信号的表示方法IQ调制实现方式基本数字调制:ASK、FSK、PSK FSK、MSK和GMSKPSK调制BPSKQPSKOQPSKQAM调制正交频分复用OFDM各种调制的应用调制调制——就是对消息源信息进行编码的过程,其目的就是使携带信息的信号与信道特性相匹配以及有效的利用信道。
多径衰落、多普勒频率扩展;日益增加的用户数目,无线信道频谱的拥挤这些因素对调制方式的选择都有重大的影响。
信号的表示I/Q信号基础I/Q是什么?--I/Q调制过程基带复信号表示方法I/Q调制实现过程数字调制基本类型U MOD(t)=ÛC(t)cos[ C t+ C(t)]AMConventional ModulationDigital ModulationASK,Amplitude Shift KeyingU 01110数字调制基本类型U MOD(t)=ÛC(t)cos[ C t+ C(t)]FMConventional ModulationDigital Modulation FSK,Frequency Shift KeyingU11100tPSK,Phase Shift Keying 数字调制基本类型tU0000111U MOD (t)=ÛC (t)cos [ C t + C (t)]MConventional Modulation Digital ModulationFSKs 2FSK (t )b (t )f 1f 1f 1f 2f 2f 2111000(a )相位不连续的FSK波形22cos()t +11cos()t +(b )相位连续的FSK波形b (t )111s 2FSK (t )c (t )f 1f 1f 1f 2f 2f 2()t (载波)图3.32FSK信号的波形MSK-最小相移键控MSK的频谱frequency:500MHz,bitrate:270kBit/sec,data:PRBS-sequence (511Bits)MSK特点MSK信号是恒包络信号码元转换时刻,信号的相位是连续的,以载波相位为基准的信号相位在一个码元期间内线性的变化+/-90度。
数字调制技术一般情况下,信道不能直接传输由信息源产生的原始信号,信息源产生的信号需要变换成适合信号,才能在信道中传输。
将信息源产生的信号变换成适合于信道传输的信号的过程称为调制。
在调制电路中,调制信号是数字信号,因此这种调制称为数字调制。
数字调制是现代通信的重要方法,它与模拟调制相比有许多优点:数字调制具有更好的抗干扰性能、更强的抗信道损耗及更高的安全性。
在数字调制中,调制信号可以表示为符号或脉冲的时间序列,其中每个符号可以有m种有限状态,而每个符号又可采用n比特来表示。
主要的数字调制方式包括幅移键控(amplitude shift keying,ASK)、频移键控(frequency shift keying,FSK)、相移键控(phase shift keying,PSK)、多电平正交调幅(multi level quadrature amplitude modulation,mQAM)、多相相移键控(multiphase shift keying,mPSK),也包括近期发展起来的网格编码调制(trellis coded modulation,TCM)、残留边带(vestigial sideband,VSB)调制、正交频分复用(orthogonal frequency division multiplexing,OFDM)调制等。
1.幅移键控幅移键控就是用数字信号控制高频振荡的幅度,可以通过乘法器和开关电路来实现。
幅移键控载波在数字信号1或0的控制下通或断。
在信号为1的状态下,载波接通,此时传输信道上有载波出现;在信号为0的状态下,载波被关断,此时传输信道上无载波传送。
那么,在接收端就可以根据载波的有无还原出数字信号1和0。
移动通信要求调制方式抗干扰能力强、误码性能好、频谱利用率高。
二进制幅移键控的抗干扰能力和抗衰落能力差,误码率高于其他调制方式,因此一般不在移动通信中使用。
2. 频移键控频移键控或称数字频率控制,是数字通信中较早使用的一种调制方式。


第5章 数字调制技术5.1介绍系统设计者利用数字调制在一个带通信道上传输基带数字信息.最基本的数字调制技术是二进制符号调制法,传输的信息被编码为值0或1,并以每T 秒一个bit 的速率发送.两个信号s t 0()和s t 1()需要被用来各自代表二进制数字0和1.同时,二进制数可以被分为不同的块,每块包含有n 个bit.因此就有M=2n 个不同的块,就需要M 个不同的信号来明确地代表不同 的块.每n 个bit 被称为具有持续时间T nT s 的符号,其中T 是每bit 的间隔.这种类型的传 输称为M进制符号调制法.在本章我们将讨论在有高斯白噪声(AWGN)的具有等概率错误bit 的带限信道上传输数字信息.首先我们先研究基带信号,它的带宽和错误概率.紧接着我们介绍在无 线频率上对基带信号调制的概念,并描述基带信号可以用幅度,频率和相位来进行调制 .在头脑中有了这些基本概念之后,我们进一步研究普通调制方法的错误概率并阐述它 们在无线和个人通信系统(PCS)中的应用.本章只对数字调制技术进行了简要的阐述.5.2基带信号数据传输的基带输出是一系列的二进制数据,不能直接通过无线链路发送.通信设计者必须选择无线信号来代表二进制数据,并让数据接收机在解码时有最小的错误.对于最简单的二进制系统,我们两个信号(用s t 0()和s t 1()来表示)去各自代表二进制值0和1.因为没有完美的信道,接受机将收到高斯白噪声(AWGN ),n(t).接收机(见图5.1)将通过一个滤波器h(t)来处理信号和噪声,并在每个信号间隙T 的最后时刻判断出发送机发送的是1或0.S 0S 1 图5.1 在白色高斯噪声中二进制信号的检测结构s t 0()和s t 1()在间隙T 的能量认为是有限的,并各自用E 0和E 1来表示为了简单起我们假定噪声的幅度为高斯概率密度函数且认为噪声的在频率上的谱密度是平坦(白噪声),并具有值为N 02/的双边带功率谱密度(PSD). 当s t 0()为滤波器的输入时,在t = T 的输出为V=S 0+N (输入为s t 0() ) 其中S 0为当输入为s t 0()时输出的信号部分 N 为输出的噪声部分.同样当s t 1()为滤波器的输入时, 在t = T 的输出为 V=S 1+N (输入为s t 1() ) 由于n(t)是一个常量N,所以噪声方差α2由下面的公式决定 σ2=H f N df ()22-∞∞⎰即 σ2=N H f df 02()∞⎰=N 0B N 其中H(f)为滤波器的传输函数B N =H f df ()2∞⎰为噪声等效带宽或为接收机滤波器函数H(f)的噪声带宽. 假定s t 0()为当前滤波器的输入,V 的概率密度函数(PDF)为 ()()p v s e v s 0212022=--⎛⎝⎫⎭⎪⎪πσσ同样地,当s t 1()为当前滤波器的输入,V 的概率密度函数为 ()()p v s e v s 1212122=--⎛⎝⎫⎭⎪⎪πσσ如果s t 0()为当前输入,出错的概率为 ()()p e s p v s dv A 00=∞⎰如果s t 1()为当前输入,出错的概率为 ()()p e s p v s dv A11=-∞⎰如果s t 0()的先验概率为p,s t 1()先验的概率为q=1-p,则这个平均的错误概率为 P e =()pP e s 0+()qP e s 1 P e =p ()120222πααe dv v s A--⎛⎝⎫⎭⎪⎪∞⎰+q()120222πααe dv v s A--⎛⎝⎫⎭⎪⎪-∞⎰如果我们对上述等式简化,对此等式关于A 微分,再使这个导数等于零,我们可以决定门限A 的最佳选择,它使错误概率P e 最小. A=A opt =α210S S - lnp q +S S 102- 在绝大部分系统中,值0和1出现的概率是进似相等的,如果它们不相等,设计者通常会重新设计编码方法以保证它们出现的概率是近似相等.这样p=q,因此A=A opt =S S 102-当p = q , A 取最佳值时,错误概率为P e =12erfc S S 1022-⎡⎣⎢⎤⎦⎥α=Q S S 102-⎡⎣⎢⎤⎦⎥α 这里erfc u ()是一个互补的错误函数=1-erf u ()=22Q u () 错误函数定义为 e r f u ()=2πe dt t u-⎰2以及Q u ()=12πedx x u-∞⎰22或者Q u ()=euu -222π u >>1 高斯积分 紧接着,我们要去找一种滤波器,它使错误的概率最小,如等式(5.10)中描述.在t 0时刻 ,采样值包含有一个与信号相关的部分()g t 00和噪声部分()n t 00,这个滤波器被称为匹配滤波器,并有传递函数()H f 0被优化在t 0时刻去提供最大的输出SNR 比率.因为我们有两 个信号s t 1()和s t 0(),所以我们在接收机的设计中需要两个滤波器.如果我们传送一个信号s t (),它的傅立叶变换为()S ϖ,这是一个复函数.最佳的适应滤波器有一个频率响应()H ϖ H ()ϖ=S e j t *()ϖϖ-0其中S *是这个信号的共轭傅立叶变换.总之这种滤波器是不能实现的,因为分析表明它必须在输入之前就有输出,然而我们不能设计一种电路能预测未来.但我们可以设计出接近于理想滤波器的滤波器. SNR 的比率定义为 ξ2=g t 0202()α它同样可以有另一种描述.SNR 比率ξ的最大值是输入信号能量(E g )的两倍除以单边带输入噪声谱密度.(忽略输入信号的波形). ξm a x2=20E N g对于一个二进制系统.等式(5.13)可化为ξm a x2=10N [()()]s t s t dt T1020-⎰由于输入在范围(0,T)之外为零,根据最佳接收机滤波器,错误概率化为P e =12()erfc z =Q ()2z其中z =140N [()()]s t s t dt T1020-⎰如果传送的脉冲允许以M 个等概率的传输电平出现,每个传输脉冲的信息速率为log 2M bit .对于一个恒定的信息速率,传输系统的带宽由于此而减小.利用M 进制传输,我们将发现错 误的概率将升高.但如果我们有足够的SNR,高的误码率将是无关紧要.这样,我们可以利用过量的SNR 值去对信号编码,并从而减小它的带宽. 当我们在基带系统中增加多个电平值,我们将减小了接收机输出的每个检策电平间的距离.这样,多个电平值的基带系统的误码率由计算在误码距离上适当地减小来决定.如果最 大电压为V ,在检测器的每个等间隔的误码距离为d e =VM -1其中M 为电平数. 把二进制系统中误码距离V 设置为等式(5.16)中定义的误码距离,则多电平的误码率为 P e =12log M M M -⎡⎣⎢⎤⎦⎥1()erfc V M -⎡⎣⎢⎤⎦⎥12σ 多个bit 出错的概率假定为很小,以至被忽略.等式(5.17)误码率与信号最大值V 2有关,决定与平均电压有关的P e ,M 电平系统的平均 电压通过平均不同脉冲幅度电平相关的电压来决定.[]V a v g2=2MV M V M V -⎛⎝ ⎫⎭⎪+-⎛⎝ ⎫⎭⎪++⎡⎣⎢⎤⎦⎥131222[]V a v g2=()2122V M M -()21212j j M-=∑如果对于一个二电平的系统中信号间隙为T,具有相同数据速率的M 电平系统的信号间 隙由下式决定 T M =T log 2M 对于一个升 余弦滤波器,噪声带宽为B N =12()T M从等式(5.3)中,可得到σ2=N T M2σ=12N T M 012⎡⎣⎢⎤⎦⎥ 把等式(5.20b)代入到等式(5.17)中,可得到P e =12log M ⎡⎣⎢⎤⎦⎥M M -⎡⎣⎢⎤⎦⎥1()erfc V M N T M -⎛⎝ ⎫⎭⎪⎡⎣⎢⎢⎢⎢⎢⎤⎦⎥⎥⎥⎥⎥1012 每个符号的能量E s =E b log 2M =V 2T M ,其中E b 为每个bit 的能量.所以 V 2=E MT b Mlog 2把等式(5.22)中的V 代入到等式(5.21)中,可得到P e =12log M ⎡⎣⎢⎤⎦⎥M M -⎡⎣⎢⎤⎦⎥1()erfc E N M M b 0122121⎛⎝ ⎫⎭⎪-⎡⎣⎢⎢⎤⎦⎥⎥log S N R =信号功率噪声功率=()()E M T N T b M M log 20112⎛⎝ ⎫⎭⎪S N R =2log 20M E N b ⎛⎝ ⎫⎭⎪另外一种不同的基带信号是双极性基带信号(APBS),两个信号极性相反.如s t 0()=-V ,s t 1()=V ,在0=t =T, s t 1()-s t 0()=2V .可从等式(5.15)中计算出z =140N ()22V dt T⎰=V T N 20=E N b其中E b 是s t 0()或s t 1()的能量,即每个bit 的能量.P e =120erfc E N b ⎡⎣⎢⎤⎦⎥=Q E N b 20⎡⎣⎢⎤⎦⎥ APBS 也用来调制一些信号.我们将对APBS 的SNR 与其它调制方式进行比较.5.3 调制技术 当我们在远距离发送信号时,基带信号是不适宜用来使用.所以我们必须把信号调制到RF 信道上.当我们传输数据流时,我们把数据流转换为模拟信号()()A t t cos ϖθ+.此信号具有三种性质,幅度,频率和相位,这样我们可以改变其中的任一种性质来作为调制方式.传输数字信号的三种调制方式的基本形式是: 振幅键控(ASK) 移频键控(FSK) 移相键控(PSK)保持ϖ和θ不变,可以得到ASK. 保持()A t 和θ不变,可以得到二进制(或M 进制)FSK. 保持ϖ和()A t 不变,可以得到二进制(或M 进制)PSK.在混合的系统中,当一个新的符号传输 时会有两个性质同时改变.最普遍的方法是固定ϖ改变()A t 和θ.这种方法被称为正交振幅调制(QAM).每种不同的调制方法具有不同的发送和接收设计,占有不同的带宽和不同的误 码率.在本章余下的部分我们将验证大部分的方法并计算它们的误码率.所有的信号在理论上都 具有无限的带宽,而调制时必须是一个有限的带宽.带宽的限制带来误码率滤波器的带宽必须选择以优化带宽和误码率之间的关系.这种关系是根据收集到的实验数据依经验来决定的,所以我们将不计算各种调制方法的带宽.5.3.1幅度键控 在ASK 中,我们通过改变载波的幅度来调制基带信号当我们检验时发现ASK 与基带信号相比并未在误码率或带宽上有所提高.在ASK 中,我们以信号()s t 0=0来作为二进制’0’, 以信号()s t 1=A t cos()ϖ0来作为二进制’1’,每个比特间隙的能量为E b =A T 22.纯粹ASK 在二进制’0’时不发送信号,在二进制’1’时发送一个信号.这样在0<t<T 时, ()s t 0=0,()s t 1=V t cos()ϖ0.在等式(5.15)中,我们定义基带信号的误码率为P e =()Q z 2.现在我们开始为ASK 计算z. z =140N ()[]V ft dt T cos 22π⎰=V T N 208所以 z =()E N b avg20P e =()Q E N b avg⎡⎣⎢⎢⎢⎤⎦⎥⎥⎥=()1220erfc E N b avg我们把计算M 进制的误码率作为课后作业.总之因为其他调制方法在误码上有更好的性能,M 进制没有被采用. 6. 3.2频移键控在FSK 中随着不同基带信号的输入,传输信号的频率在不断地改变. 以信号t w w A t s )cos()(0∆+=来作为二进制’0’,以信号t w w A t s )cos()(0∆-=来作为二进制’1’,每个比特间隙的能量为E b =A T 22.对于一个M 进制FSK,需要M 个不同的频率,比特流被划分每组具有n(M n =2)个比特的信号,每个信号以t w w A )cos(∆+ (j=1,M)的形式传输.如果我们选择确当的∇ϖ,使∇ϖ与每个符号相关,就可以得到相关的FSK 信号. 在这种调制方式中,在间隙0<t<T 之间, s t 0()=V ft cos 2π s t 1()=V f f t cos ()2π+∇ 其中 ∇=f k T 2,k 为整数.信号()s t 0和()s t 1必须是正交相关的,s t s t dt T10()()⎰=0[]s t s t dt T12()()-⎰=VT 2z =V T N 204=E N b20P e =Q E N b 0⎡⎣⎢⎤⎦⎥=1220erfcE N bFSK 与ASK 在相同的p e 的情况下,在E N b 0上有相同的性能.相关与非相关的M 进制FSK 的带宽效率为R B ϖ=232log MM +R B ϖ=222log MM其中R 为数据速率B ϖ为带宽.5.3.3相移键控信号的幅度和频率只能在一维上变化,因为它们都是一维的对象.而载波的相位为 两维的对象;所以利用PSK 我们可以更好地处理带宽和误码率之间的关系.当我们利用PSK 改变载波的相位时,我们可以有多种调制方法.对于二进制PSK, 以信号()s t 0=A t cos()ϖ来作为二进制’0’,以信号()s t 1=A t cos()ϖπ+来作为二进制’1’,每个比特间隙的能量为E b =A T 22.对于一个M进制PSK,需要M 个不同的相位,比特流被划分每组具有n(M n =2)个比特的信号,每个信号以A t j cos()ϖθ+ (j=1,M)的形式传输.M 个相位PSK 的误码距离为()V M sin π,其中V 为在检测机处的信号的幅度.如果在两个相位检测器之一的输出噪声超过一定的范围就会检测到一个错误.一个检测到的错误假定只产生一个比特的错误.对于PSK 的误码率的一般描述可以通过改变等式(5.17)得到,P e =12log M erfc V M sin πσ2⎡⎣⎢⎢⎢⎤⎦⎥⎥⎥信号幅度V 可以描述为,V =()E M T b log 2112⎡⎣⎢⎤⎦⎥RMS 的噪声σ为,σ=N T 01212⎛⎝ ⎫⎭⎪⎡⎣⎢⎤⎦⎥在一个奈奎肆特带宽的噪声. 把等式(5.28)和(5.29)代入到等式(5.27)中,可得P e =()12201212log sin log M erfc M M E N b ⎛⎝ ⎫⎭⎪⎛⎝ ⎫⎭⎪⎛⎝ ⎫⎭⎪⎡⎣⎢⎢⎤⎦⎥⎥π SNR 比率为SNR=log 20M E N b ⎛⎝ ⎫⎭⎪,M>2M 进制PSK 的带宽效率为R B ϖ=log 22M 其中R 为数据速率B ϖ为带宽.5.3.3.1二进制相移键控 如果利用相位为0和180度的两个信号,我们可以得到二进制相移键控(BPSK).这样在0<t<T 时()s t 0=-V ft cos 2π和()s t V ft 12=cos π我们通过计算函数Q 中的z 来计算误码率,()[]z N V f dt V T N E N T b===⎰1422202200cos π P e r f c E N Q E N e b b ==⎡⎣⎢⎤⎦⎥12200BPSK 与基带信号有同样的误码率.通过研究BPSK 的信号,我们可以看到BPSK 就是具 有值V 和-V 的ASK .5.3.3.2正交相移键控如果我们定义四个信号,每个之间有90度的相移,这样我们就得到四相移键控(QPSK) .我们在前面已经计算了M 个信号的普通PSK 信号误码率.对于QPSK,M=4,所以把4代入等式(5.30)中,可得()P e r f c E N e b =⎛⎝ ⎫⎭⎪⎛⎝ ⎫⎭⎪⎛⎝ ⎫⎭⎪⎡⎣⎢⎢⎤⎦⎥⎥14442201212l o g s i n l o g πP e r f c E N Q E N e bb ==⎡⎣⎢⎤⎦⎥12200输入的二进制比特流{b k },b k =±1;k=0,1,2,..,以每秒1/T 个比特速率到达调制器的输入端.并被分为两个数据流()αI t 和()αQ t ,各自包含着奇偶比特,调制的QPSK 信号()s t 为()()()s t t ft t sn ft I Q =+⎛⎝ ⎫⎭⎪++⎛⎝ ⎫⎭⎪122424αππαππcos 12()s t A ft t ()cos =++⎡⎣⎢⎤⎦⎥24ππθ其中 ()()A I Q =+=12122αα以及 ()()()θααt a t t Q I =-t a n()θt ,-π/2,π/2,π代表()αI t 和()αQ t 的4个值.在I/Q平面上,QPSK 可表示为4个空间指针,每个之间相隔π/2.载波的4个可能相位中的任一个代表着两个bit 的数据 .这样每个符号代表两个bit.因为QPSK 的符号速率是数据速率的一半,所以与BPSK 相比 同一个数量的信道带宽,QPSK 在有两倍的信息量.这种情形是可能的,因为两个信号I 和Q 是正交的,能够互不干扰地传输. 在QPSK 中,载波相位只能在每2T 秒上变换.如果从一个2T 间隙到下一个间隙,没有bit 流变化符号,载波相位就会保持不变.如果()αI t 或()αQ t 中的一个元素变化符号,就会有π/2的相移产生.如果I 和Q 同时改变符号,就会有π的相位变化.当这个180度的相位被发射机和 接收机的滤波器滤波,将在检测到的信号幅度上发生一个变化,引起别的错误. 如果两个bit 流I 和Q 有1/2bit 间隙的偏移,因为相位不会改变180度,这个幅度的波动会被 最小化,还有一种调制方式,偏差QPSK(OPQSK)是由传统的QPSK 通过把奇数码元相对与偶 数码元延时半个bit 的间隙.这样传输相位的范围为0到90度,并发生两次,只有QPSK 的一半. 在发射机和接收机发生的幅度波动只有很小的数量.QPSK 和OQPSK 的误码率和带宽效率与BPSK 相同. 在理论上,4相键控(或偏差4相键控)系统能提高移动系统的频谱效率.然而它们需要相干检测器,在多径衰落环境中,相干检测的利用是困难的,经常在非相干系统中导致不好的性能.相干检测的问题可以通过差分检测器来克服,但OQPSK 将会有符号间干扰,导致差的系统性能.图5。
基本数字调制什么是数字调制?在通信领域中,数字调制(Digital Modulation)是一种将数字信号转换成模拟信号的过程。
在数字通信中,信息以离散的形式传输,因此需要将数字信号转换为模拟信号以便在信道中传输。
数字调制技术所做的就是通过将数字信号调制到高频载波上,使其能够在信道中传输。
数字调制可以分为基带调制和带通调制两种方式。
基带调制是将数字信号直接调制到基带频率上,这种方式适用于短距离传输。
而带通调制则是将数字信号调制到射频频率带上,这样可以实现远距离传输和抗干扰能力强。
基本数字调制的分类基本数字调制主要包括以下四种调制方式:1.ASK(Amplitude Shift Keying)调制: ASK调制是一种将数字信号调制到载波上的调制方式。
在ASK调制中,载波的幅度会根据数字信号的取值而变化。
即当传输的比特为1时,载波的幅度为A,当传输的比特为0时,载波的幅度为0。
这种调制方式简单易实现,但对噪声和干扰比较敏感。
2.FSK(Frequency Shift Keying)调制: FSK调制是一种将数字信号调制到载波频率上的调制方式。
在FSK调制中,载波的频率会根据数字信号的取值而改变。
即当传输的比特为1时,载波的频率为f1,当传输的比特为0时,载波的频率为f2。
这种调制方式在抗干扰能力方面较好,但调制复杂度较高。
3.PSK(Phase Shift Keying)调制: PSK调制是一种将数字信号调制到载波相位上的调制方式。
在PSK调制中,载波的相位会根据数字信号的取值而改变。
即当传输的比特为1时,载波的相位为θ1,当传输的比特为0时,载波的相位为θ2。
这种调制方式适用于高速传输,但对抗多径传播的干扰较为敏感。
4.QAM(Quadrature Amplitude Modulation)调制: QAM调制是一种将数字信号同时调制到载波的幅度和相位上的调制方式。
在QAM调制中,载波的幅度和相位会根据数字信号的取值而变化。
数字调制技术总结_技术季度总结数字调制技术是通信领域中最基础也是最重要的技术之一。
它将一定范围内的连续模拟信号转化为离散数字信号,通过数字信号的传输来实现信号的传输和处理。
数字调制技术已经广泛应用于多个领域,包括电信、无线通信、网络通信等。
本文将从数字调制的基本原理、应用和进展等几个方面进行总结。
一、数字调制的基本原理数字调制的基本原理是将模拟信号通过采样器进行离散化处理,获得一系列的数字信号,然后对这些数字信号进行处理,使之能够在数字传输信道中传输。
在数字调制中,数字信号通常使用二进制进行表示,而模拟信号通常使用正弦波进行表示。
数字调制的主要方法包括脉冲编码调制(Pulse Code Modulation, PCM)、频率调制(Frequency Modulation, FM)、相位调制(Phase Modulation, PM)、振幅调制(Amplitude Modulation, AM)等。
每种数字调制方法都有其独特的优点和适用范围。
二、数字调制的应用数字调制技术已经广泛应用于多个领域,包括电信、无线通信、网络通信等。
在电信领域中,数字调制广泛用于数字传输系统中,如数字电路交换、卫星通信、网路电话等。
在无线通信中,数字调制被广泛应用于手机、无线电等设备中。
在网络通信中,数字调制被广泛应用于无线(WiFi、蓝牙等)和有线(光纤、以太网等)通信设备中。
三、数字调制技术的进展数字调制技术随着科技的不断进步也在不断改进,目前已经出现了一些新的数字调制技术和标准。
比如QPSK(Quadrature Phase Shift Keying)调制、16QAM(Quadrature Amplitude Modulation)调制和最新的64QAM调制等,这些新技术的出现不仅显著地提高了信号的传输效率和可靠性,而且大大降低了成本。
同时,数字调制技术的应用也在不断地扩展和深化。
比如数字调制技术被广泛应用于导航、传感器、雷达等领域中。
数字调制ask
数字调制是一种将数字信号转换为模拟信号的技术。
它在现代通信系统中起着至关重要的作用。
数字调制使得我们能够通过无线电波或电缆等媒介传输数字信息,从而实现声音、图像和数据的传输。
数字调制的过程包括两个主要步骤:调制和解调。
在调制过程中,数字信号被转换为模拟信号,以便在传输过程中进行传输。
解调过程是调制的逆过程,它将模拟信号转换回数字信号,以便接收方能够还原原始的数字信息。
在数字调制中,有几种常见的调制方式,如频移键控(FSK)、相移键控(PSK)和振幅键控(ASK)。
其中,ASK是一种简单而常用的调制方式。
它通过改变载波的振幅来表示数字信号中的信息。
当数字信号为1时,载波的振幅增加;当数字信号为0时,载波的振幅减小或为0。
ASK调制具有简单、易实现的优点,并且在低噪声环境下具有较好的性能。
然而,它对噪声和干扰非常敏感,因此需要采取一些技术手段来提高系统的可靠性。
在数字调制应用中,ASK被广泛应用于无线通信领域。
例如,无线遥控器、无线传感器网络等都使用了ASK调制技术。
此外,ASK还可以用于数据传输和通信系统中的基带信号调制。
数字调制是一种重要的通信技术,可以将数字信号转换为模拟信号
进行传输。
ASK调制是其中的一种常见方式,通过改变载波的振幅来表示数字信号中的信息。
它在各种通信系统中发挥着重要的作用,为我们的日常通信提供了便利。
《计算机网络与应用》
第3单元数据通信基础3.2 数字调制技术
主讲人:杜煜
duyu@ 数字数据的调制
对数字数据调制的基本方法有三种:幅移键控、频移键控和相移键控。
公用电话网
调制解调器计算机计算机
调制解调器数字编码(NRZ、曼彻斯特等)数字数据数字信号(数字信道)调制(ASK、FSK、PSK等)数字数据模拟信号(模拟信道)脉冲编码调制PCM 模拟数据数字信号
(数字信号)
调制(AM、FM、PM等)模拟数据模拟信号
(模拟信道)
《计算机网络与应用》杜煜No.2
幅移键控、频移键控和相移键控
⏹幅移键控ASK (Amplitude Shift Keying )
ASK 是通过改变载波信号的幅度值表示数字信号“1”、“0”,以幅度A1表示数字信
号的“1”,用载波幅度A2表示数字信号的“0”(通常A1取1,A2取0),而载波信号
的参数f 和φ恒定。
⏹频移键控FSK (Frequency Shift Keying )
FSK 是通过改变载波信号频率的方法表示数字信号“1”、“0”,用f 1表示数字信号
“1”,用f 2表示数字信号“0”,而载波信号的A 和φ不变。
⏹相移键控PSK (Phase Shift Keying )
PSK 是通过改变载波信号的相位值表示数字信号“1”、“0”,而载波信号的A 和f 不变。
PSK 包括两种类型: 绝对调相
◆绝对调相使用相位的绝对值,φ为0表示数字信号“1”,、φ为π表示数字信号“0”。
相对调相
◆相对调相使用相位的相对偏移值,当数字数据为0时,相位不变化,而数字数据为1时,相位要偏移π。
《计算机网络与应用》杜煜No.3数字数据的调制示例
频移键控FSK
绝对相移键控PSK
相位φ=πφ=0φ=πφ=0φ=0φ=π
相位φ=0相对相移键控PSK
偏移πφ=πφ不变φ=π偏移πφ=0偏移πφ=πφ不变
φ=π
幅移键控ASK
01011数字数据
《计算机网络与应用》杜煜No.4
多相调制
⏹ASK 、FSK 和PSK 都是最基本的调制技术,实现容易,技术简单,抗干扰能力差,调制速率不高,为了提高数据传输速率,也可以采用多相调制的方法。
例如,将待发送的数字信号按2个比特一组
的方式组织,因为2个比特可以有4种组合
方式,即“00、01、10、11”四个码元,所以用4个不同的相位值就可以表示出这4
组组合。
在调相信号传输过程中,相位每改变一次,传送两个二进制比特,这种调制方法就称为四相相移键控。
《计算机网络与应用》杜煜No.5
3π2
0π相位值
二进制比特00011110π2数字数据00101101
四相
相移键控
0ππ
2
π2300
01
1011
混合调相
⏹为了达到更高的信息传输速率,采用多元制的振幅相位混合调制技术,比如正交振幅调制QAM (Quadrature Amplitude
Modulation ),它不但使用相位,而且还使用幅度: 8-QAM 使用了幅度与相位的
8种组合,
由于使用3个比特可以表示8种组合,因此,每一种组合代表一个码元,每个码元3个比特。
16-QAM 的幅度和相位有16种组合,每个组合代表一个码元,每个码元4个比特。
《计算机网络与应用》杜煜No.6
000100100011
0000
01000111011001011101110011111110101010011000
1011
000001
010
011
100101110
1118-QAM 16-QAM。