先进陆地观测卫星的精确姿态和轨道控制系统
- 格式:docx
- 大小:4.02 MB
- 文档页数:21
先进的陆地观测卫星ALOS(PALSAR)介绍姚思奇201428013726035摘要2006 年, 亚太地区两颗对地观测卫星的相继升空引起了业内人士的关注。
其中一颗便是 1 月24 日发射升空的日本先进陆地观测卫星ALOS( Advance Land Observing Satellite) , 另一颗是7 月28 日发射的韩国多用途卫星KOMPSAT-2(Korean Multipurpose Satellite)。
本文着重介绍了ALOS 卫星的技术参数, 性能指标以及产品体系, 旨在为进一步研究和开发这类影像产品提供一点参考PALSAR是ALOS卫星携带的一个L波段的合成孔径雷达传感器,不受云层、天气和昼夜影响,可全天候对地观测,获取高分辨率、扫描式合成孔径雷达、极化三种观测模式的数据。
拥有穿透力更强的L 波段,且全球存档丰富,拥有多期数据,可以用来监测更广范围的细微的地表形变,更好的应用在灾害领域和地质监测领域中。
关键词:ALOS;测绘卫星;技术参数;产品体系;PALSARAbstractIn 2006, the Asia Pacific region two earth observation satellites have been launched has aroused the concern of the industry. One is Japan's Advanced Land Observing Satellite ALOS launched on January 24th (Advance Land Observing Satellite), the other is a South Korea multipurpose satellite launch in July 28th, the KOMPSAT-2 (Korean Multipurpose Satellite). This paper introduces the technical parameters of ALOS satellite, the performance index and product system, for the purpose of further research and development of this kind of imaging products to provide a reference pointPALSAR is a synthetic aperture radar sensor of a L band ALOS satellite to carry, not affected by cloud cover, weather and circadian effects, all-weather observation of earth, to obtain high resolution, scanning synthetic aperture radar, polarization three observation mode data. L band has stronger penetrating power, and global archive is rich, has the multi period data, can be used to monitor a wider range of subtle surface deformation, a better application in the field of geological disasters and monitoring in the field.Keywords:ALOS;Cartographic satellite;Technical parameters;The product system;PALSAR目录摘要 (1)Abstract (2)一.引言 (4)二.ALOS卫星的遥感测绘与其他同类卫星的比较 (6)三.ALOS影像的产品系列 (7)3.1 PALSAR利用案例 (8)3.1.1森林、湿地、植被 (8)3.1.2 地质、地形 (9)3.1.3 水文、水资源、冰山 (11)3.1.4 灾害监控、灾害管理 (11)3.1.5 土地利用、土地覆盖、农业 (15)3.1.6 海洋学领域的应用 (15)四.小结 (17)五.参考文献 (18)一.引言自从1999 年9 月, 空间成像公司将世界上第一颗商用1m 级分辨率卫星IKONO;;S- 2 成功送入预定轨道之后, 许多国家都加大了开发高分辨率卫星的力度。
人造卫星基本知识概述人造卫星是由人类制造并将其送入太空进行各种任务和功能的设备。
它们在现代通信、气象观测、地球观测、导航等领域发挥着重要的作用。
本文将概述人造卫星的一些基本知识,包括构造、种类和功能。
一、构造人造卫星的构造是基于其特定的任务需求以及环境适应性而设计的。
虽然不同的卫星可能存在一些差异,但它们通常包括以下几个主要组件:1.1 主体结构:卫星的主体结构通常由金属合金或碳纤维等材料制成,以保证足够的强度和刚度,并且能够抵御太空中的极端温度和辐射。
主体结构中通常包含有减震装置和对流散热器等组件。
1.2 动力系统:卫星的动力系统主要包括太阳能电池阵列、电池、燃料电池或核能源等装置。
这些装置提供了卫星所需的能量,以满足各种任务的运行需求。
1.3 通信系统:卫星的通信系统用于接收和发送信号,确保卫星与地面站点、其他卫星或用户之间的通信连接。
通信系统通常包括天线、收发器、调制解调器等组件。
1.4 控制系统:卫星的控制系统用于控制卫星的姿态、轨道和运行状态。
它包括各种传感器、电动轮、推进器和陀螺仪等元件,以保持卫星在正确的轨道和工作状态。
二、种类人造卫星可以根据其用途和功能分为不同种类。
以下是一些常见的人造卫星种类:2.1 通信卫星:主要用于无线电信号的传输,包括电话、电视、互联网和广播等。
2.2 气象卫星:用于观测和监测地球的大气状况,收集气象数据,以便提供天气预报和气候研究。
2.3 导航卫星:用于提供定位、导航和时间服务,例如全球定位系统(GPS)。
2.4 地球观测卫星:用于观测和监测地球的表面特征、植被、水资源、海洋等,以帮助研究和监测地球系统。
2.5 科学研究卫星:用于进行各种科学研究任务,例如天文观测、宇宙学研究等。
三、功能人造卫星的功能多样,下面列举了几种常见的功能:3.1 数据收集和传输:卫星可以收集、存储并传输各种数据,包括气象数据、地球观测数据、通信数据等。
3.2 通信和广播:卫星通过无线电信号传输数据,实现全球通信,包括电话、互联网、电视和广播等。
资源卫星简介(Resources satellite)用于勘测和研究地球自然资源的卫星。
它能“看透”地层,发现人们肉眼看不到的地下宝藏、历史古迹、地层结构,能普查农作物、森林、海洋、空气等资源,预报各种严重的自然灾害。
资源卫星利用星上装载的多光谱遥感设备,获取地面物体辐射或反射的多种波段电磁波信息,然后把这些信息发送给地面站。
由于每种物体在不同光谱频段下的反射不一样,地面站接收到卫星信号后,便根据所掌握的各类物质的波谱特性,对这些信息进行处理、判读,从而得到各类资源的特征、分布和状态等详细资料,人们就可以免去四处奔波,实地勘测的辛苦了。
资源卫星分为两类:一是陆地资源卫星,二是海洋资源卫星。
陆地资源卫星以陆地勘测为主,而海洋资源卫星主要是寻找海洋资源。
资源卫星一般采用太阳同步轨道运行,这能使卫星的轨道面每天顺地球自转方向转动1度,与地球绕太阳公转每天约1度的距离基本相等。
这样既可以使卫星对地球的任何地点都能观测,又能使卫星在每天的同一时刻飞临某个地区,实现定时勘测。
信息传输地球资源卫星获取的遥感图像数据信息量较大,卫星上需要有专门的宽频带、高速率数据传输设备。
因此常选用S和X波段,甚至Ku波段作为输出频率。
卫星并不总是处在地面台站接收范围内,因此地球资源卫星上都带有数据存贮设备,待卫星飞越接收站上空时再将数据发回。
“陆地卫星” 4号能通过数据中继卫星将所得数据实时传送到地面台站。
世界上第一颗陆地资源卫星是美国1972年7月23日发射的,名为“陆地卫星1号”。
它采用近圆形太阳同步轨道,距地球920公里高,每天绕地球14圈。
星上的摄像设备不断地拍下地球表面的情况,每幅图象可覆盖地面近两万平方公里,是航空摄影的140倍。
资源卫星示例法国的史波特卫星(SPOT)1986年2 月法国成功的发射第一颗SPOT 卫星(SPOT-1),1990 年1月再发射第二颗SPOT-2 。
1993 年8 月SPOT-1 停止使用,9月底再次成功的发射SPOT-3 卫星,但不幸于1996 年11 月失去联络,随后SPOT-1 重新启用。
GPS全球定位系统( Global Positioning System - GPS )是美国从本世纪 70 年代开始研制,历时 20 年,耗资200亿美元,于1994 年全面建成,具有在海、陆、空进行全方位实时三维导航与定位能力的新一代卫星导航与定位系统。
早期仅限于军方使用,由美国国防部 ( Depart of Defense , DoD) 所计划发展,其目的针对军事用途,例如战机、船舰、车辆、人员、攻击标的物的精确度定位等。
时至今日, GPS 早已开放给民间做为定位使用,这项结合太空卫星与通讯技术的科技,在民间市场已正在蓬勃的展开,除了能提供精确的定位之外,对于速度、时间、方向及距离亦能准确的提供讯息,运用的范围相当广泛。
一、 GPS 是什么全球定位系统属于美国第二代卫星导航系统。
是在子午仪卫星导航系统的基础上发展起来的,它采纳了子午仪系统的成功经验。
和子午仪系统一样,全球定位系统由空间部分、地面监控部分和用户接收机三大部分组成。
该系统的空间部分使用 24 颗高度约 2.02 万千米的卫星组成卫星星座。
21+3 颗卫星均为近圆形轨道,运行周期约为 11 小时 58 分,分布在六个轨道面上(每轨道面四颗),轨道倾角为 55 度。
卫星的分布使得在全球的任何地方,任何时间都可观测到四颗以上的卫星,并能保持良好定位解算精度的几何图形( DOP )。
这就提供了在时间上连续的全球导航能力。
GPS 卫星已发展至 Block II 型式的定位卫星,由 Rockwell International 制造,在轨道上重量约 1,900 磅,太阳能接收板长度约 17 呎,于 1994 年完成第 24 颗卫星的发射。
因此目前太空中有 24 颗GPS 卫星可供定位运用,绕行地球一周需 12 恒星时,每日可绕行地球 2 周,这也就是说,不论任何时间,任何地点,至少有 4 颗以上的卫星出现在我们的上空。
目前全球有五个地面卫星监控站,分布于夏威夷、亚森欣岛、迪亚哥加西亚、瓜加林岛、科罗拉多泉,这些卫星地面控制站,同时监控 GPS 卫星的运作状态及它们在太空中的精确位置,主地面控制站更负责传送卫星瞬时常数 (Ephemera's Constant) 及时脉偏差 (Clock Offsets) 的修正量,再由卫星将这些修正量提供给 GPS 接收器做为定位运用。

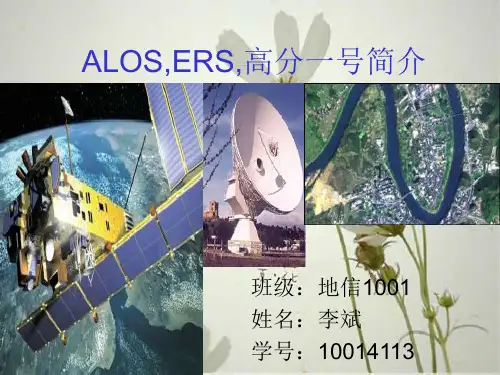
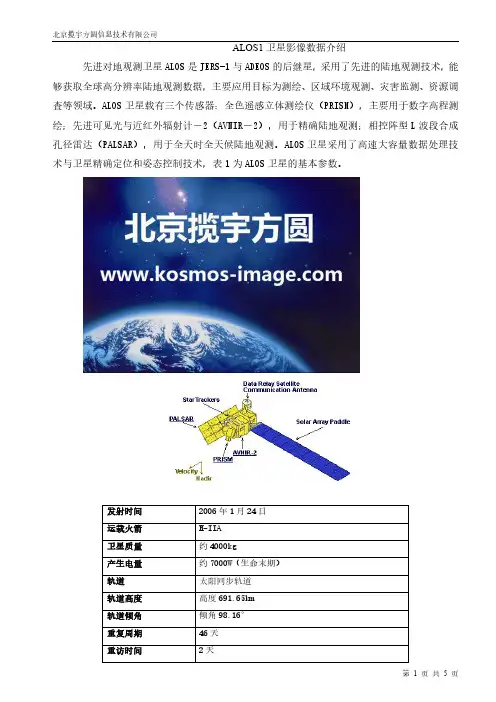
北京揽宇方圆信息技术有限公司ALOS1卫星影像数据介绍先进对地观测卫星ALOS是JERS-1与ADEOS的后继星,采用了先进的陆地观测技术,能够获取全球高分辨率陆地观测数据,主要应用目标为测绘、区域环境观测、灾害监测、资源调查等领域。
ALOS卫星载有三个传感器:全色遥感立体测绘仪(PRISM),主要用于数字高程测绘;先进可见光与近红外辐射计-2(AVNIR-2),用于精确陆地观测;相控阵型L波段合成孔径雷达(PALSAR),用于全天时全天候陆地观测。
ALOS卫星采用了高速大容量数据处理技术与卫星精确定位和姿态控制技术,表1为ALOS卫星的基本参数。
发射时间2006年1月24日运载火箭H-IIA卫星质量约4000kg产生电量约7000W(生命末期)轨道太阳同步轨道轨道高度高度691.65km轨道倾角倾角98.16°重复周期46天重访时间2天表1ALOS技术规格表表2ALOS雷达数据技术规格表PALSAR主要规格模式高分辨率扫描式合成孔径极化(试验模式*1)中心频率1270MHz(L-波段)线性调频宽度28MHz14MHz14MHz,28MHz14MHz极化方式HH or VV HH+HV or VV+VH HH or VV HH+HV+VH+VV入射角8~60°8~60°18~43°8~30°空间分辨率7~44m14~88m100m(multi ook)24~89m幅宽40~70km40~70km250~350km20~65km量化长度5位5位5位3或5位数据传输速率240Mbps240Mbps120Mbps,240Mbps240Mbps 散射系数*2<-23dB(幅宽70km)<-25dB<-29dB<-25dB(幅宽60km)信号不定性比(S/A)*2,*3>16dB(幅宽70km)>21dB>19dB>21dB(幅宽60km)辐射精度1景内1dB/1轨道内 1.5dB天线尺寸方位角方向:8.9m x仰角方向::3.1m注:在侧视角度为41.5度时,观测区域在北纬87.8度至南纬75.9度之间。
卫星发射过程中如何控制航天器的姿态在卫星发射的浩瀚征程中,控制航天器的姿态是至关重要的一环。
这就好比一个舞者在舞台上,需要精确地控制自己的身体姿态,才能展现出优美的舞蹈动作;航天器在太空中的运行也是如此,只有精准地控制姿态,才能顺利完成各项任务。
那么,什么是航天器的姿态呢?简单来说,就是航天器在空间中的指向和旋转状态。
比如,卫星的太阳能电池板要始终朝向太阳,通信天线要对准地球,这都需要对卫星的姿态进行精确控制。
在卫星发射的初期阶段,火箭发动机的推力是影响航天器姿态的一个重要因素。
为了抵消火箭发动机推力带来的干扰,通常会采用推力矢量控制技术。
这就好比开车时,通过调整方向盘来改变车辆的行驶方向。
在火箭上,通过改变发动机喷管的方向或者调节喷管的流量,来改变推力的方向和大小,从而实现对航天器姿态的初步控制。
当航天器与火箭分离后,就进入了自主控制姿态的阶段。
这时候,会有一系列的姿态敏感器发挥作用。
常见的姿态敏感器有太阳敏感器、地球敏感器、星敏感器等。
太阳敏感器就像是一个专门寻找太阳的“小眼睛”,它通过检测太阳光线的入射角度来确定航天器相对于太阳的姿态。
地球敏感器则是专注于感知地球的位置和形状,从而帮助航天器确定自己相对于地球的姿态。
而星敏感器则更加高级,它能够通过观测恒星的位置来精确确定航天器在太空中的姿态。
有了这些“眼睛”感知姿态信息,接下来就需要“大脑”来处理这些信息并做出控制决策。
这个“大脑”就是航天器上的姿态控制系统。
姿态控制系统通常由控制器、执行机构和控制算法组成。
控制器就像是指挥官,它接收来自姿态敏感器的信息,经过一系列的计算和分析,制定出控制策略。
执行机构则是听从指挥官命令的“士兵”,负责将控制指令转化为实际的动作。
常见的执行机构有动量轮、磁力矩器、推进器等。
动量轮是一种通过改变自身的转速来产生控制力矩的装置。
当需要调整航天器的姿态时,动量轮会加速或减速旋转,从而产生反作用力矩,使航天器的姿态发生改变。
卫星姿态及轨道控制方法主要包括以下几种:
姿控发动机:姿控发动机用于改变卫星的姿态,其燃料喷射方向不同可以产生不同方向的推力,从而改变卫星的姿态。
姿控发动机通常采用离子推进器或化学推进器。
引力牵引:利用地球引力场,通过改变卫星的轨道高度和速度,使其受到引力牵引,从而实现姿态控制。
热控制:热控制是指通过控制卫星内部的温度,调整卫星的热平衡,从而减少热对姿态控制的影响。
智能控制系统:智能控制系统是指利用人工智能等技术,对卫星进行实时监测和预测,从而快速响应和处理各种情况,保证卫星的稳定运行。
地面仿真和控制:地面仿真和控制是指利用地面站对卫星进行仿真和控制,从而测试和验证卫星的各种性能,提高卫星的可靠性和稳定性。
总之,卫星姿态及轨道控制方法多种多样,根据实际情况选择合适的方法可以保证卫星的稳定运行。
航空航天科技的航天器控制与导航技术航空航天科技的航天器控制与导航技术在现代空中航行和太空探索中起着关键作用。
它涉及到对航天器的操控和导航,确保其准确、平稳地到达目的地,同时使得人类能够更深入地探索宇宙的奥秘。
本文将介绍一些航空航天科技中的航天器控制与导航技术,并探讨其在航天领域的应用。
一、航天器控制技术航天器控制技术包括姿态控制和轨道控制两个方面。
姿态控制是指航天器在太空中保持特定的姿态,使其能够正确地执行任务。
姿态控制通常使用推进器和陀螺仪等设备来实现,它们可以实时调整航天器的姿态,确保其保持稳定。
同时,航天器还需要对外部环境的变化做出相应的响应,比如遇到陨石碎片时需要及时做出闪避动作。
轨道控制是指航天器对其轨道进行调整和修正,以保持所需的轨道形状和参数。
在航天器发射后,轨道控制技术可以帮助航天器调整其速度和方向,以便进入预定的轨道。
在轨道运行过程中,航天器还需要进行轨道保持和轨道修正,以抵消外部扰动和保持轨道稳定。
二、航天器导航技术航天器导航技术是指航天器在太空中准确地确定自身位置和方向的方法和技术。
由于太空中缺乏地面导航设施,航天器导航技术需要依赖于自身的传感器和算法来实现。
常用的导航方法包括星敏感器、惯性导航系统和地标导航等。
星敏感器是一种能够感知和测量恒星位置的设备,航天器通过测量恒星的位置和亮度来确定自身的方向和姿态。
惯性导航系统则通过测量航天器的加速度和角速度来推测其位置和速度变化,从而实现导航。
地标导航则是通过观测地球上的特定地标,如山脉和河流,通过与地面地图的比对来确定航天器的位置。
航天器导航技术在航天任务中具有非常重要的意义。
它可以帮助航天器准确地到达目标轨道或行星表面,并确保其执行任务期间的安全和稳定。
例如,航天器在探测火星时,需要依靠导航技术来准确地进入火星轨道,并定点降落。
导航技术的准确性和稳定性对于航天任务的成功至关重要。
三、航天器控制与导航技术的应用航天器控制与导航技术在航天领域得到了广泛应用。
三轴稳定卫星姿态确定及控制系统的研究一、本文概述随着航天技术的飞速发展,三轴稳定卫星已成为现代空间科技领域的重要组成部分。
这类卫星通过其精确的姿态确定及控制系统,实现了在太空环境中的稳定运行和高效工作。
本文旨在深入研究三轴稳定卫星的姿态确定及控制系统,探讨其工作原理、技术挑战以及优化策略,为未来的卫星设计与控制提供理论支持和实践指导。
本文首先将对三轴稳定卫星的基本概念和特点进行介绍,明确研究背景和目的。
随后,将详细分析卫星姿态确定的基本原理和方法,包括传感器技术、数据处理算法以及姿态估计理论等。
在此基础上,将探讨控制系统的设计原则和实现方式,包括姿态控制策略、执行机构选择以及控制算法优化等。
本文还将对三轴稳定卫星姿态确定及控制系统中的关键技术进行深入剖析,如姿态传感器误差补偿、控制算法鲁棒性增强以及卫星在轨自主定姿等。
将结合国内外相关研究成果,对现有的姿态确定及控制技术进行总结和评价,指出存在的问题和改进方向。
本文将提出一种优化的三轴稳定卫星姿态确定及控制系统设计方案,通过仿真实验和实地测试验证其有效性和可行性。
这一方案将为未来卫星的设计和制造提供有益的参考,推动航天技术的持续进步和发展。
二、三轴稳定卫星姿态确定原理三轴稳定卫星的姿态确定是其控制系统中的核心环节,它涉及到卫星在空间中的方向感知和姿态调整。
三轴稳定卫星的姿态确定原理主要基于惯性测量单元(IMU)和星敏感器(Star Tracker)等传感器的数据融合处理。
惯性测量单元(IMU)是卫星姿态确定的基础设备,它通过内部的陀螺仪和加速度计来测量卫星的角速度和加速度,进而推算出卫星的姿态变化。
然而,由于IMU的长期误差积累,单纯依赖IMU进行姿态确定无法满足长时间、高精度的要求。
因此,需要引入星敏感器(Star Tracker)等光学传感器进行辅助。
星敏感器通过拍摄星空图像,识别出已知的天体位置,进而解算出卫星的姿态。
这种方式的优点是精度高、误差积累小,但其缺点是受到观测条件的限制,例如在地球阴影区、太阳光照强烈等情况下,星敏感器可能无法正常工作。
卫星轨道控制系统设计与研究第一章:引言1.1 研究背景卫星轨道控制系统是指通过对卫星的姿态、轨道和能量等方面的控制,使卫星能够满足特定任务需求,并保持良好的工作状态。
随着卫星应用的广泛发展,卫星轨道控制系统的设计和研究变得非常关键。
1.2 研究目的和意义卫星轨道控制系统的设计与研究旨在提高卫星的定位精度、运行稳定性和任务执行能力,进而保证卫星正常工作。
该研究的意义在于为卫星应用领域提供强有力的技术支持,推进卫星技术的快速发展。
第二章:卫星姿态控制系统设计2.1 卫星姿态控制系统概述卫星姿态控制系统是卫星轨道控制系统的核心部分,通过对卫星的姿态进行控制,确保卫星能够正确朝向目标,并保持稳定状态。
2.2 卫星姿态传感器卫星姿态传感器用于测量卫星在空间中的姿态信息,包括角速度、角度和姿态矩阵等。
常用的卫星姿态传感器有星敏感器、陀螺仪和磁力计等。
2.3 卫星姿态控制器卫星姿态控制器根据姿态传感器获取的数据,计算并控制卫星的姿态。
常用的卫星姿态控制方法有主动控制和被动控制两种。
2.4 卫星姿态控制算法卫星姿态控制算法是卫星姿态控制的核心技术,包括PID控制、最优控制以及自适应控制等方法。
不同算法适用于不同的卫星任务和需求。
第三章:卫星轨道控制系统设计3.1 卫星轨道控制系统概述卫星轨道控制系统通过对卫星的速度和轨道参数的控制,确保卫星能够按照预定轨道运行,完成特定的任务。
3.2 卫星轨道控制器卫星轨道控制器根据轨道控制要求,计算并控制卫星的速度和轨道参数。
常用的卫星轨道控制方法有推力控制和姿态控制两种。
3.3 卫星轨道测量技术卫星轨道测量技术用于测量和监测卫星在轨道上的位置和速度参数。
常用的卫星轨道测量技术包括GPS定位、星载测距和星基测距等。
3.4 卫星轨道模拟与优化设计卫星轨道模拟与优化设计是卫星轨道控制的重要环节,通过仿真和优化分析,选择最佳的轨道参数和控制策略,以提高卫星运行的效率和精度。
第四章:卫星能量控制系统设计4.1 卫星能量控制系统概述卫星能量控制系统是保证卫星能够正常运行的重要组成部分,主要包括电源系统和能量管理系统。
卫星姿态轨道控制原理今天来聊聊卫星姿态轨道控制原理的话题。
你看啊,咱们平时放风筝的时候,如果想让风筝飞得又高又稳,还得摆出各种有趣的姿势,就得不断地拉扯风筝线调整它的方向,在太空中的卫星其实也有点类似的情况呢。
卫星在天上可不是随意飘荡的,就像汽车得沿着马路跑一样,卫星也要按照规定的轨道运行,这个轨道决定了卫星在空间的位置。
要保持卫星在既定轨道运行,就得克服许多外界干扰因素,比如地球的不均匀引力啦,其他天体的引力影响啦,还有太阳光压等。
这就需要进行轨道控制。
打个比方,轨道控制就像是让卫星在太空高速路上稳稳行驶。
卫星自身带有动力系统或者可以通过利用地球的引力等进行轨道机动。
比如说,通过在卫星上安装不同类型的推进器。
当需要改变轨道高度或者轨道平面时,推进器点火工作,像汽车踩油门加速或者转弯似的,改变卫星的速度向量,从而实现轨道的调整。
再来说说卫星姿态控制。
咱们都知道,卫星上的很多设备都有特定的指向要求的。
比如通信卫星得保证天线对准地球特定区域。
卫星姿态控制就是控制卫星在太空中的朝向。
你可以把卫星想象成一艘在太空中航行的小船,姿态控制系统就像船上的舵,时刻调整小船的船头方向。
卫星可以通过动量轮、磁力矩器等设备来实现姿态控制。
像动量轮,它通过高速旋转来存储角动量,然后根据需要改变角动量的方向来调整卫星的姿态,就像用船上的重物调整平衡进而改变船的方向一样。
说到这里,你可能会问卫星姿态和轨道控制这两者之间有没有相互影响呢?这个问题很有意思,其实它们是密切相关的。
不准确的轨道控制会导致卫星受到不同的力的作用,从而间接影响到姿态;反过来,卫星姿态没控制好,也会影响到用于轨道控制的推进装置的工作效果等。
我在学习这个原理的过程中,一开始也特别困惑像引力助推这种比较复杂的轨道控制方法。
引力助推就好像卫星在太空中搭顺风车,路过行星的时候利用行星的引力和相对运动给自己加速或者改变轨道方向,但具体怎么一回事真的费了我好大劲儿才理解呢。
先进陆地观测卫星(ALOS)精度姿态和轨道控制系统日本,Tsukuba,日本的国家空间开发机构。
Takeshi Yoshizawa, Hiroki Hoshino,和Ken Maeda NEC东芝太空系统,日本横滨。
摘要先进的陆地观测卫星(ALOS)是NASDA的高分辨率地球观测的旗舰。
ALOS任务的特点是同时取得了250万的分辨率和全球的数据收集,它需要一套指向的要求,为观测到的图像提供精确的几何精度。
在指向管理框架,旨在满足指向要求,态度和轨道控制系统(家)对自己严格的要求:态度稳定(3.9×10−4度p p),态度决定射门角度(上:3.0×10−4度),和定位精度(离线:1米)。
为AOCS开发和实现了多种解决方案。
这一挑战包括精密恒星跟踪器、高精度GPS 接收机、高性能机载计算机、基于星型传感器的姿态确定和控制、柔性结构的相位稳定和精密的协同控制。
本文介绍了AOCS原型机的设计和测试结果,重点介绍了新方法的发展,使其具有了一定的精度。
1.介绍在土地观察方面,继续努力争取更高的决议。
随着空间分辨率的提高,观测图像几何精度的重要性越来越明显。
这一趋势已经给今天的地球观测卫星的姿态和轨道控制系统的设计带来了影响。
国家空间发展的先进陆地观测卫星(ALOS)。
图1:先进的陆地观测卫星。
日本航空公司(NASDA)在2004年开始研发,是高分辨率地球观测的旗舰(图1)。
主要致力于制图,ALOS的独特特点是同时实现了信心目标:全球数据收集,分辨率达250万。
这种特性要求精确的地理定位和几何校正,而不需要地面控制点。
为此,我们为ALOS开发了一组指示性需求:指向稳定(-44.010⨯度p-p),定位精度(板载:-44.010⨯度,脱机:-42.010⨯度),定位精度(板载:200米,脱机:1m)。
为了满足这些需求,一种扩展了姿态控制、卫星系统和地面系统的集成框架被取消了。
由于姿态和轨道控制系统(AOCS)是实现这些要求的关键,我们对AOCS进行了严格的精度要求。
为了接受这个挑战,AOCS开发并实现了各种解决方案。
ALOS AOCS的特点是它的精度。
它的性能和性能,为日本的姿态和轨道控制系统提供了一个新的标准。
本文介绍了ALOS AOCS原型机的设计和测试结果,特别强调了新的开发。
图2:ALOS原型模型的集成2.先进陆地观测卫星(ALOS)2.1任务概述目前地球观测有两个品种。
一是通过观察全球环境来代表地球科学的使命,而另一个代表实际应用的陆地区域观察任务。
ALOS是一个大型高分辨率卫星,旨在促进实际应用。
特别地,ALOS致力于制图、区域环境监测、灾害管理支持和资源调查,通过全球收集高分辨率图像。
2.2卫星系统为了完成任务要求,ALOS有3个大型观测传感器:立体测图(PRISM)的全色遥感仪(PRISM),具有2.5m的空间分辨率,先进的可见光和近红外辐射-2 (A VNIR-2),具有多光谱能力,相控阵型l波段合成孔径雷达(PALSAR)具有全天候观测能力。
作为一个卫星整体,ALOS是一颗大型地球观测卫星,其质量为4000kg,产生的功率为7kW。
它将由一个H-IIA 火箭发射到一个太阳同步的次循环轨道,它的高度为691.65公里,在当地时间的10点30分升节点,并将执行任务5年。
NASDA已经完成了ALOS工程模型的开发测试和原型飞行模型的设计。
目前,如图2所示,卫星原型机模型的测试和积分正在NASDA的Tsukuba空间中心进行。
图3:指向需求的频域表示图4:指向管理系统2.3指出需求具有250万分辨率的全球数据收集的任务特性,得到了精确的地理位置测定和全球观测图像的几何校正的要求。
在重测条件下,像素地理位置的确定精度、图像的几何畸变、调制传递函数的退化都是最小化的,重叠部分是最大的。
为此,需要对卫星位置和传感器的指向方向进行精确的测量,并将传感器指向方向的变化最小化。
表1总结了这些指向需求。
要求在指向稳定性、指示反终止精度和位置确定精度方面遇到困难。
在图3中给出了指向要求的频域表示。
2.4精密指向管理ALOS引入了一个集成框架,如图4所示,以给出这些需求的解决方案。
这个框架,指向管理系统,扩展到传统的AOCS 到热变形的热变形设计,传感器的校准管理,控制带宽的控制,干扰管理,时间管理,高带宽指向测量,数据处理设计,以及基于地面的图像处理的指向确定[3]。
由于卫星姿态的相互作用具有显著的姿态控制精度、姿态稳定性、姿态确定精度和位置确定精度,并给予AOCS(表2)。
表1:指向要求(3σ)3.态度动力学3.1开环动态树脂黄有三个大型柔性结构:太阳能ar-ray 桨(PDL)23米的长度和质量的220公斤,PALSAR 天线的长度9米和480公斤的质量,和数据中继通信(DRC)天线2米的长度和质量的160公斤。
柔性结构的最低振动模式为0.03Hz 的太阳能桨,0.5Hz 为PALSAR, 3.7Hz 为DRC ,在无约束条件下。
在图5中给出了卫星的典型开环频率响应。
考虑到这些灵活的结构和ALOS 的平移运动,我们可以通过以下的运动方程来表达ALOS 的态度动力学:01()j j j T j i i i c e j iI R qT T ωδδ+⨯+=+∑∑ (1) 0+0jj i i TvCG j j M q δ=∑∑ (2)2T T 0112()0j j j j j jj j j i i i i i i j i i CG i q q q R v ζωωωδδδ+++⨯++= (3) i=模式编号,j = PDL, PALSAR, DRC 。
3.2干扰图6展示了ALOS 的态度动态及其关系的主要元素。
内部和外部干扰的Ma-jor 源包括DRC 的天线驱动机构、AVNIR-2镜像驱动机构、反应轮、PDL 驱动机构、PDL 热-mal snap ,以及太阳辐射压力不连续性的环境干扰。
这些扰动不仅影响了航天器主体的刚体姿态,而且激发了DRC H/D 齿轮和支撑臂、PALSAR 、PDL 、空间飞行器主结构和推进剂晃动的各种动态模式。
除了这些因素外,错误的姿态控制参考框架也会导致姿态退化。
系统角质层的陀螺效应也很重要。
图6:扰动和动态模式图7:干扰频率特性3.3频率特性先前描述的扰动和动态模式有它们自己的频率内容。
图7显示了它们的频带,表明扰动和动态模态分布在较宽的频率范围内。
虽然姿态位移的低频率分量主要受到姿态控制的抑制,但干扰抑制控制带宽和姿态控制的补偿带宽是频率受限的。
因此,本征值管理和干扰管理对控制带宽之外的姿态位移具有重要的意义。
图5:姿态频率响应(PDL角度= 90度)图8:AOCS过渡方式工艺流程图4姿态和轨道控制系统4.1 概述ALOS姿态和轨道控制系统(AOCS)的主要规格见表2。
ALOS AOCS基于三轴垂向姿态确定和零动量姿态控制。
它有一个采集模式,一个正常的控制模式,和一个轨道控制模式,如图8所示,并通过一个基于星型跟踪的姿态确定和控制在正常控制模式下,实现了表2中指定的精度。
这个AOCS 是由它的精度所独有的,特别是姿态稳定性(43.910-⨯度/5s),板载的刚毅测定精度(43.010-⨯度),地面定点定位精度(42.010-⨯度),地面定位定位精度(1m +)。
在设计这个AOCS 时,我们开发了新技术,以实现ALOS 的精度要求,同时利用ETS-VI 、ADEOS 和ADEOS-II AOCSs 的技术传统。
4.2体系结构4.2.1硬件体系结构该体系结构如图9所示(硬件架构)和图10(软件体系结构)。
除了传统的成分如地球传感器(ESA ),太阳传感器(FSS ),惯性参考单元(IRU ),和磁力矩器(MTQ )、AOC 介绍以下新的组成部分:(1)高精度星敏感器(STT )与随机误差角9.0arecsec 和0.74弧秒偏置角误差,(2)高精度GPS 接收机(GPSR )能够双频载波相位测量,(3)高性能机载计算机(AOCE )基于新的64位星载微处理器,和(4)用于补偿桨致热卡和天线驱动引起的干扰力矩大飞轮。
图9:AOC 体系结构(硬件)图10:体系结构(软件)图11:AOC的闭环控制框图4.2.2软件架构该飞行软件(ACFS)是用C语言在一个基于商业的基于电子的实时操作系统上实现的。
态度等传统的应用程序采集、轨道控制,ESA的基础态度确定和控制,和FDIR安装以下新功能:(1)FMM(容错多处理器经理),(2)明星身份,(3)精密态度决心使用扩展卡尔曼滤波,(4)精密合作控制,(5)桨驱动控制与动态避免共振,(6)轮角速度偏差操作,(7)上精密轨道模型,(8)1553 b 数据之间,(9)冲洗液兼容的数据处理。
4.2.3闭环架构将AOCS硬件和软件集成在一起构成图11所示的闭环。
该AOCS的一个独特之处是基于STT的精度态度决定(PADS)和基于ESA的标准态度去终止(SADS)的并行处理。
在正常模式下,AOCS控制ALOS的态度与精确的态度估计,同时它通过FDIR函数来监测精确的态度估计和标准的态度估计。
在精密姿态确定系统的操作和应急模式下,标准的态度也被用于姿态控制。
该设计使我们能够为用户提供精确的态度,以达到卓越的姿态控制和态度的稳定性,同时以标准的态度决定国家的传统,最大限度地降低风险。
图12展示了AOCS组件在进行的原型飞行测试中的飞行硬件。
4.3 容错设计ALOS AOCS的容错设计有三个层次。
在最低级别上,所有AOCS组件都有内部冗余或备用冗余,以实现对单个硬件故障的健壮性。
在这些冗余的基础上,建立了容错计算机系统,在此基础上,通过FMM、回滚处理、延时表型和MPU重新配置对2个MPU的相互监视,在单个故障、单个事件或MPU级别的延迟事件中维护计算能力。
此外,该系统还通过EDAC 进行了1位错误校正,并通过观察狗定时器对其进行了过度躲避。
在顶部的层次结构中,在ACFS中的FDIR程序是一个失败,并对一个子系统级异常重新配置AOCS。
图12:AOCS PFM在原型飞行测试中图13:指向数据处理图14 :AOCE结构表3:AOCS组件规范4.4数据处理设计地球观测卫星的现代姿态和轨道控制系统预计将具有生成任务数据的附加功能,用于观测图像的几何校正。
ALOS AOCS可以提供24小时的人力资源。
态度估计,数据,数据,和GPSR 数据,除了传统的健康和家庭保持遥测。
如图13所示,这些数据以全速率被记录下来,并作为低速任务数据与地面接收站的低速度任务数据相关联,在这些站点中,离线的姿态和位置决定被执行,以达到较高的精度。
5 AOCS组件本节描述了AOCE、STT和GPSR。
其他AOCS组件的主要规格见表3。