机器人技术 第五章 轨迹规划PPT课件
- 格式:ppt
- 大小:1.96 MB
- 文档页数:50
ABB工业机器人编程第五章在ABB工业机器人编程的旅程中,第五章标志着重要的里程碑。
这一章节将深入探讨机器人的运动学和动力学,为后续的编程操作奠定坚实的基础。
机器人运动学是研究机器人末端执行器在不同关节角度下所能够达到的空间位置和姿态的科学。
在ABB机器人中,这些关节角度被称为“关节变量”。
理解这些关节变量如何影响机器人的运动是非常重要的。
我们需要理解机器人坐标系。
一般来说,ABB机器人使用的是六自由度的机械臂,这意味着它有六个关节,每个关节对应一个角度。
这些角度可以由一个六元组(q1, q2, q3, q4, q5, q6)来表示。
然后,我们需要理解位姿(位置和姿态)的概念。
位姿是由三个线性分量(x, y, z)和三个旋转分量(roll, pitch, yaw)组成的。
这些分量描述了末端执行器的位置和朝向。
我们需要理解如何通过运动学方程将关节角度转化为位姿。
这需要使用到一些复杂的数学公式,例如雅可比矩阵。
通过这些公式,我们可以将关节角度映射到位姿,从而精确地控制机器人的运动。
机器人动力学是研究机器人运动过程中力与运动之间关系的科学。
在ABB机器人中,动力学主要的是如何在给定关节角度的情况下,计算出所需的关节扭矩。
我们需要理解牛顿-欧拉方程。
这个方程描述了物体的惯性(质量乘速度的平方)和外部力(例如重力、摩擦力)之间的关系。
通过这个方程,我们可以计算出在给定关节角度下,机器人所需的关节扭矩。
然后,我们需要理解如何通过动力学方程将关节扭矩转化为关节角度。
这需要使用到一些复杂的数学公式,例如动力学方程。
通过这些公式,我们可以将关节扭矩映射到关节角度,从而精确地控制机器人的运动。
在理解了机器人运动学和动力学的基础上,我们可以开始进行编程实践了。
在ABB工业机器人编程中,主要使用的是RobotWare软件。
这个软件提供了一套完整的编程环境,包括建模、仿真、编程、调试等功能。
我们需要使用RobotWare软件进行建模。
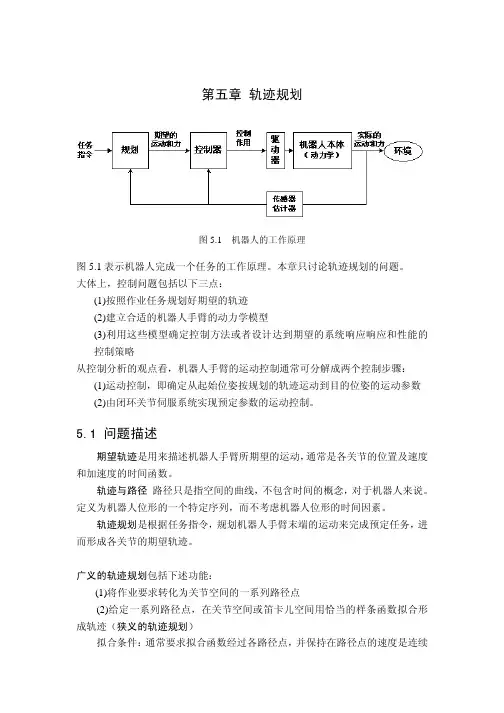
机器人学领域中的运动学与轨迹规划机器人学是一门研究如何设计、制造和应用机器人的科学和技术。
机器人学领域中的运动学和轨迹规划是机器人学的核心内容之一。
一、运动学运动学是机器人学中研究机器人运动状态的学科,并且是一种描述机器人位置、速度和加速度等运动参数的方法。
一个完整的机器人都可以通过由多个关节组成的联动机构进行自由灵活的运动。
因此,了解每个关节的运动参数,包括角度、速度和加速度等,有助于更好地控制机器人的运动。
1. 机器人的运动学参数机器人的运动学参数包括关节角度、机器人的位姿和机器人工具端点的位姿等。
其中,各个关节的角度是决定机械臂位置的最基本的参数,机器人位姿描述机器人身体的位置、方向和姿态等信息,而机器人工具端点的位姿描述机器人工具的位置和方向信息。
了解这些运动学参数对于需要实现机器人的运动控制和规划非常重要。
机器人学家们研究如何控制和规划机器人的运动,以便机器人能够完成各种各样的任务,例如生产线上的组装、协作机器人之间的交互等。
2. 机器人的运动学模型机器人的运动学模型主要用于描述机器人的运动规律和动力学参数,包括机械结构参数、质量分布以及摩擦系数等。
运动学除了能够定义机器人的位置和运动规律外,还能够对机器人进行动力学仿真和运动规划,使机器人的控制更加精确和高效。
3. 常见的机器人运动学模型(1)PUMA模型PUMA模型是一种广泛应用于工业机器人的模型之一,其中PUMA的全称为:Programmable Universal Machine for Assembly,即用于装配的可编程通用机器。
PUMA机器人由5个自由度的旋转关节构成,使它能够沿x,y和z轴进行运动。
(2)SCARA模型SCARA(Selective Compliance Assembly Robot Arm)是一种广泛应用于装配和加工的机器人,具有三个旋转角度和一个平移自由度。
SCARA机器人通常用于精确的三维加工和装配任务,如内部器件装配、晶片制造等。


机器人运动学与动力学的轨迹规划近年来,机器人技术越来越受到关注,被广泛应用于各个领域,如工业制造、医疗保健、农业等。
机器人的运动学和动力学是其中非常重要的两个方面。
在机器人的路径规划中,运动学和动力学的特性对于实现精确且高效的轨迹规划至关重要。
在机器人运动学中,研究的是机器人的位置和位姿的数学描述,包括了关节坐标和笛卡尔坐标系两种描述方法。
关节坐标系通过机器人的关节角度来描述机器人的位置和姿态,而笛卡尔坐标系则通过机器人的位姿参数来描述。
在进行轨迹规划时,机器人的运动学模型可以用来计算机器人在关节空间和笛卡尔空间中的运动路径。
运动学模型的好处在于能够将机器人的轨迹规划问题转化为几何学问题,从而简化了路径规划的计算过程。
与运动学不同,机器人的动力学研究的是机器人的运动与力之间的关系。
动力学模型可以描述机器人在进行运动时所受到的力和力矩。
动力学模型的建立需要考虑到机器人的质量、惯性、摩擦等因素,从而能够更精确地预测机器人的运动特性。
在轨迹规划中,动力学模型可以用来优化机器人的运动轨迹,以实现更加平稳、高效的运动。
轨迹规划是机器人运动控制中的一个重要问题,在实际应用中需要考虑到多种因素。
其中,避障是轨迹规划中常见的挑战之一。
通过运动学和动力学的分析,可以根据机器人的运动特性预测其可能的运动轨迹,并在规划路径时避开障碍物,以确保机器人的安全运行。
此外,路径规划还需要考虑到机器人的速度、加速度限制等因素,以保证机器人在运动过程中的动力学特性不会过于剧烈,从而降低机器人运动的顺滑性和精度。
机器人的轨迹规划可以使用多种方法,常见的包括解析法、优化法和仿真法等。
解析法是利用运动学和动力学方程直接求解轨迹规划问题,以得到机器人的运动方程和运动控制模型。
优化法则是通过设定优化目标和约束条件,利用优化算法求解最优的机器人路径规划问题。
仿真法则是通过建立机器人运动学和动力学模型,并在计算机中进行仿真,模拟机器人在不同环境下的运动情况,以寻找最佳的轨迹规划方案。
工业机器人运动轨迹规划技术随着工业生产的快速发展和机器人技术的逐渐成熟,工业机器人已经成为了现代工厂中不可缺少的一部分。
然而,随着机器人数量的增加和任务复杂度的提高,工业机器人运动轨迹规划技术也日益发展。
本文将介绍工业机器人运动轨迹规划技术及其发展趋势。
一、运动轨迹规划的意义在工业生产中,机器人的运动轨迹规划是非常重要的,其主要目的是为了保证机器人能够高效、准确地完成任务。
而规划运动轨迹能够直接影响工业机器人的运动性能,包括速度、加速度、精度、稳定性等。
所以,一个好的运动轨迹规划方案不仅能够使机器人完成任务,而且能够保证机器人的安全和可靠性。
二、基本运动轨迹规划方法1.位姿规划方法位姿规划方法是运动轨迹规划的最基本方法,其主要是为机器人规划出一串位置坐标点,然后机器人按照这些位置点依次移动,从而完成任务。
一般情况下,位姿规划是采用数学模型计算得出的,主要是采用正运动学和逆运动学方法。
2.时间规划方法时间规划方法主要是为机器人规划出一段时间内应该完成的运动,一般是确定机器人在每一个时间点的位置、方向和速度等信息。
时间规划方法是在位姿规划的基础上进一步计算的,它可以有效地控制机器人的运动速度和加速度,同时也能够保证机器人的精度和稳定性。
3.优化规划方法优化规划方法是一种基于最优化算法的运动轨迹规划方法,主要是为了解决复杂任务中的多目标、多约束优化问题。
尽管优化规划方法计算量大,但在大规模复杂任务中具有非常重要的作用。
三、轨迹规划技术的发展趋势1.深度学习技术的应用人工智能和深度学习技术的快速发展将为运动轨迹规划技术带来非常大的变化。
深度学习带来的主要优势是可以处理非常大的数据量,从而可以识别出更加复杂的模式,进而提高机器人的运动性能。
2.仿真技术的发展随着工业基础设施的升级和运算能力的提高,仿真技术日趋成熟,其在工业机器人的运动轨迹规划中发挥着越来越重要的作用。
仿真技术可以模拟现实环境中的场景,并为机器人规划出最佳的运动轨迹,从而降低机器人的开发成本和风险。