KUKA机器人与S7-1200 Profinet通讯 (高端培训)
- 格式:pdf
- 大小:1.83 MB
- 文档页数:15

MCGS触摸屏与与西门子S7-1200PLC以太网通讯
一、查看西门子1200PLC的iP地址,并做简单的设置
首先单击“可访问设备”打开界面后,选选择 PG/PC 接口的类型,在PG/PC 接口中选择自己与PLC 相连的网卡,点击“开始搜索”,过一会就出出现包括 PLC 在内的所有的可访问设备的 IP
或在项目树中选中当前PLC鼠标右键
在PROFINET接口选择以太网地址查看或修改IP地址
接着在防护与安全选中连接机制勾选允许........
完成以上几步简单操作后,选择编译并下载至CPU
二、MCGS触摸屏的操作
设置 MCGS 的 IP 地址
为了能与 PLC 通信,应将 MCGS 的 IP 设为同一网段。
首先需要
在触摸屏(型号为TPC7062ti)开机显示进度条时点击屏幕,出现启动选项时进度系统维护
选择设置系统参数
选择IP地址
设置和PLC相同网段的地址后点击OK
然后打开MCGS组态软件新建项目
选择设备窗口,并进行设备组态
本地IP选择触摸屏的地址;远端IP选择PLC的地址
在用户窗口新建简单的画面关联PLC的变量后下载
完成后输入正确的触摸屏IP地址后,选择下载。


基于PROFINET协议的西门子S7-1200PLC与KUKA机器人通信实践作者:孙鹏来源:《科学大众》2019年第07期摘; ;要:机器人技术自20世纪60年代问世以来,取得了长足的发展。
机器人4大家族中的KUKA机器人以其简单的操作和优秀的二次开发性能被国内越来越多的生产企业认可和使用,工业机器人成为工业自动化系统的3大支柱之一,它和自控系统控制器的通信已经变得越来越重要。
文章探讨并实践了基于Profinet协议的KUKA机器人和西门子PLC之间的通信方式。
关键词:Profinet协议;KUKA工业机器人;西门子S7-1200 PLC目前工业机器人已得到了广泛的应用,最有代表性的是在汽车制造业中,其在焊接、喷漆、装配、搬运等工序中都大显身手,在金属加工制造业、电器制造业、塑料加工业等方面也应用广泛。
随着现代科学技术的发展,机器人功能和性能不断提高,应用领域也进一步扩大[1]。
KUKA公司于1898年在德国奥格斯堡成立,其产品广泛应用于汽车、冶金、食品和塑料成形等行业。
2016年8月,我国美的集团完成了对KUKA机器人的收购。
KUKA与日本YASKAWA,瑞士ABB,日本FANUC并称为工业机器人制造商的“四大家族”。
伴随着信息化在制造业中的广泛应用以及中国制造2025战略的持续推进,工业机器人作为工业自动化3大支柱之一,发挥着越来越重要的作用。
工业机器人与传统自动化设备的可编程逻辑控制器(Programmable Logic Controller,PLC)之间的通讯协作能力也尤为重要。
KUKA工业机器人支持和西门子、罗克韦尔等多品牌的PLC产品进行外部通信,其通信方式主要采用现场总线的方式。
目前,KUKA工业机器人可以支持Ethernet,PROFINET,PROFIBUS等现场总线通信方式,其中PROFINET是最为流行的现场总线之一。
S7-1200PLC是西门子公司生产的紧凑型PLC,具有模块化结构和紧凑型设计。



S7-1200与S7-1200 之间Profinet IO 通信CPU 的"I-Device"(智能设备)功能简化了与IO 控制器的数据交换和CPU 操作过程(如用作子过程的智能预处理单元)。
智能设备可作为IO 设备链接到上位IO 控制器中,预处理过程则由智能设备中的用户程序完成。
集中式或分布式(PROFINET IO 或PROFIBUS DP)I/O 中采集的处理器值由用户程序进行预处理,并提供给IO 控制器。
图1. 网络架构智能设备的应用领域:分布式处理可以将复杂自动化任务划分为较小的单元或子过程,这样简化了子任务的同时也优化了项目管理。
单独的子过程通过使用智能设备,可以将分布广泛的大量复杂过程划分为具有可管理的多个子过程。
必要的话,这些子过程可存储在单个的TIA 项目中,这些项目随后可合并在一起形成一个主项目。
专有技术保护智能设备接口描述使用GSD 文件传输,而不是通过STEP 7 项目传输,这样用户程序的专有技术得以保护。
智能设备的优势:简单链接IO 控制器。
实现IO 控制器之间的实时通信。
通过将计算容量分发到智能设备可减轻IO 控制器的负荷。
由于在局部处理过程数据,从而降低了通信负载。
可以管理单独TIA 项目中子任务的处理。
智能设备可以作为共享设备。
S7-1200 CPU 之间组态智能设备S7-1200 V4.0及以上版本开始支持智能IO 设备功能。
本示例中介绍1200 CPU之间如何进行智能设备PROFINET通信,分别在相同项目和不同项目下进行组态,实验环境如下所示。
软件:TIA V15.1硬件:CPU 1217C DC/DC/DC V4.3CPU 1215C DC/DC/DC V4.3设备角色及地址:S7-1200 智能设备在相同项目下组态STEP 1:创建TIA Portal 项目并进行接口参数配置使用TIA V15.1创建一个新项目,进入网络视图添加表1列出的所有设备,并进入各个设备以太网地址选项分别设置子网、IP地址以及设备名称。

FANUC_机器人与S7-1200_Profinet通讯FANUC机器人与S7-1200 PLC Profinet 通讯方法一、PLC组态1. 新建项目2. 添加新设备3. 选择CPU类型(注意:版本号要跟硬件一致)4. 以太网地址5. 添加新子网6. IP 协议(注意PLC的IP地址要跟机器人的IP地址在同一个网段)7. 设备和网络8. 添加机器人(需要先安装好FANUC 机器人GSD文件)9. 选择硬件目录下→其他现场设备→ PROFINET IO → I/O → FANUC →R-30Ib EF2 →AO5B-2600-R843;FANUC Robot Controller(1.0)10. 组网11. 点击未分配12. 进入设备视图13. 双击r30ib-iodevice(机器人图标)设置机器人IP 地址(注意要更机器人中的IP地址一致)14. 根据项目的需要添加通讯I/O的字节数(注意这里的起始地址就是跟机器人通讯的首地址)15. PLC输入I的首地址(I 68.0开始)16. 输出Q的首地址(Q2.0开始)17. 转到拓扑视图连接PLC 到机器人(选择机器人的Port1就是由上往下的第2个网口)18. 编译19. 下载:PG/PC要跟计算机的网卡对应21. 准备下载22. 下载23. 下载完成24. 编程下载25. 测试机器人的DI1-D12前2位检查通讯结果OK (64个字节I/O)26. 测试机器人的DI511-D512后2位,检测通讯结果OK(64个字节I/O)二、机器人设置1. 设置机器人Profinet IP地址: 按下示教器上MEUN键→ 5 I/O →选中I/O 2页面→PROFINET(M) → ENTER →选中2频道(备注:2频道是机器人做从站)→按下DISP键→选中IP地址→按下F4键(编辑)→编辑完成后→按下F1键→(适用)→完成IP地址编辑。
注意要跟电脑上组态机器人的IP地址一致!2. 编辑插槽类型和字节长度:按下示教器上MEUN键→ 5 I/O →选中I/O 2页面→PROFINET(M) → ENTER →按下F4键(编辑)→选中输入输出插槽→编辑完成后→按下F1键(适用)→光标移到插槽大小→按下F4键(编辑)选中字节大小→按下F1键(适用)→编辑完成。

FANUC机器人与S7-1200 PLC Profinet 通讯方法一、PLC组态1. 新建项目2. 添加新设备3. 选择CPU类型(注意:版本号要跟硬件一致)4. 以太网地址5. 添加新子网6. IP 协议(注意PLC的IP地址要跟机器人的IP地址在同一个网段)7. 设备和网络8. 添加机器人(需要先安装好FANUC 机器人GSD文件)9. 选择硬件目录下→其他现场设备→ PROFINET IO → I/O → FANUC →R-30Ib EF2 →AO5B-2600-R843;FANUC Robot Controller(1.0)10. 组网11. 点击未分配12. 进入设备视图13. 双击r30ib-iodevice(机器人图标)设置机器人IP 地址(注意要更机器人中的IP地址一致)14. 根据项目的需要添加通讯I/O的字节数(注意这里的起始地址就是跟机器人通讯的首地址)15. PLC输入I的首地址(I 68.0开始)16. 输出Q的首地址(Q2.0开始)17. 转到拓扑视图连接PLC 到机器人(选择机器人的Port1就是由上往下的第2个网口)18. 编译19. 下载:PG/PC要跟计算机的网卡对应21. 准备下载22. 下载23. 下载完成24. 编程下载25. 测试机器人的DI1-D12前2位检查通讯结果OK (64个字节I/O)26. 测试机器人的DI511-D512后2位,检测通讯结果OK(64个字节I/O)二、机器人设置1. 设置机器人Profinet IP地址: 按下示教器上MEUN键→ 5 I/O →选中I/O 2页面→PROFINET(M) → ENTER →选中2频道(备注:2频道是机器人做从站)→按下DISP键→选中IP地址→按下F4键(编辑)→编辑完成后→按下F1键→(适用)→完成IP地址编辑。
注意要跟电脑上组态机器人的IP地址一致!2. 编辑插槽类型和字节长度:按下示教器上MEUN键→ 5 I/O →选中I/O 2页面→PROFINET(M) → ENTER →按下F4键(编辑)→选中输入输出插槽→编辑完成后→按下F1键(适用)→光标移到插槽大小→按下F4键(编辑)选中字节大小→按下F1键(适用)→编辑完成。

S7-1200如何与14台KUKA机器⼈进⾏MODBUSTCP通信,图⽂教程⽆论是KUKA还是ABB,亦或是其他品牌的机器⼈,他们与PLC通信的⽅式⼤多都是采⽤PROFINET IO形式,不需要编程,⽽且通信也是实时的,但需要机器⼈配置PROFINET⽹卡,这⽆疑增加了机器⼈的采购成本,其实,机器⼈默认⽀持MODBUS TCP通信的,PLC也是,我们完全可以通过MODBUS TCP 简单的编程实现与机器⼈的通信。
S7-1200中具有14个MODBUS TCP通信资源,也就是说可以同时与14台机器⼈进⾏通信,⼀般情况下,机器⼈作为服务器,PLC作为客户端。
我们以PLC做客户端,与14台作为服务器的机器⼈进⾏通信,说明如何编程。
采⽤MODBUS TCP通信,只需要编程,不需要任何的组态,直接写程序就⾏。
⾸先从指令集中调⽤MB_CLIENT指令,这是客户端指令,MB_SERVER是服务器指令。
程序段1是PLC写数据到1号机器⼈。
MB_MODE=0是读,MB_MODE=1是写。
MB_DATA_ADDR是1号机器⼈的数据区地址,这⾥⽤的保持性寄存器地址,注意机器⼈的保持性寄存器地址⼀定要加上40001之后,才是MB_DATA_ADDR正确的数值。
MB_DATA_LEN是数据的长度,单位是WORD。
如果MB_DATA_ADDR不是保持性寄存器地址,则MB_DATA_LEN的单位是BIT。
MB_DATA_PTR是数据区,也就是说把PLC中哪⾥的数据写⼊到1号机器⼈,即源数据。
CONNECT是连接参数,很关键,在这⾥填写机器⼈的IP地址和端⼝号。
CONNECT的参数如下图所⽰。
RemoteAddress就是机器⼈的IP地址。
RemotePort就是机器⼈的端⼝号。
如果ActiveEstablished=1,即PLC做客户端,如果ActiveEstablished=0,即PLC做服务器。
1号机器⼈的ID要和2号机器⼈的ID不⼀样,⼀个机器⼈⼀个独⽴的ID,数值随便填写即可。

FANUC机器人与S7-1200 PLC PROFINET通讯及外部启动配置前段时间项目接触到需用西门子1200PLC与发那科机器人进行Profinet通讯.由于发那科工业机器人这方面资料比较难找,下面我将该项目的配置步骤分享给大家,欢迎留言探讨。
FANUC机器人与S7-1200PLCPROFINET通讯步骤一、PLC组态(一)新建项目(二)点击设备与网络,添加新设备(三)选择CPU 类型(注意:PLC型号及版本号要更硬件一致)(四)双击PLC网络端口,建立以太网地址(五)添加新子网(一般情况位PN/IE1)(六)设定IP地址(注意:PLC的IP地址要跟机器人的IP地址应在同一网段类)(七)进入设备和网络,添加机器人(需要提前安装好机器人的GSD文件)(八)在右侧选择硬件目录→其它现场设备→PROFINET IO→I/O→FANUC→R-30ib EF2→A05B-2600-R834:FANUC Robot Controller(1.0)(九)双击硬件进行组态(十)进行组网。
双击机器人硬件端口,添加子网、添加机器人IP地址、PROFINET设备名称(机器人IP地址应与机器人本体设置的IP地址一致、设备名称与机器人本体设置的名称一致)(十一)根据项目需求添加通讯I/O字节数。
此项目添加16字节的输入输出模块(十二)返回设备和网络,进行控制器分配(十三)分配后,PLC与机器人之间会链接在一起(十四)设置机器人IO地址(此处地址是与机器人通讯的首地址)(此处的I 对应机器人的DO、此处的Q对应机器人的DI )(十五)组态完成后,进行编译(十六)编译完成后,下载进PLC中(十七)下载、点击装载(十八)下载完成。
二、机器人设置(一)设置机器人PROFINET地址:按下示教器上 MEUN 键→ 5I/O → 选中 I/O 页面→PROFINET(M) → ENTER →选中 2 频道(备注:2 频道是机器人做从站)→按下 DISP 键 →定址模式选择DCP→选中 IP 地址→按下 F4 键(编辑)→编辑完成后→按下 F1 键→(适用)→完成 IP 地址编辑。

KUKA与西门子PLC进行Profibus通讯
一、前提条件:
①需要官网下载倍福Profibus总线模块EL6731-0010的GSD文件;
②需要Profibus总线连接器将倍福模块与西门子300Profibus-DP 接口连接。
二、打开Workvisual软件,导入设备说明文件EL6731-0010的GSD文件。
三、按照硬件实际情况进行组态
四、设置KUKA机器人需要与PLC进行通讯的字长度、并激活。
五、设置机器人作为从站的站号;
六、建立IO映射关系
以上完成了机器人作为从站的通讯设置,接下来设置PLC侧。
七、同样需要在西门子STEP7软件中安装倍福EL6731-0010的GSD文件,安装完成以后,设置从站的地址、进行数据长度组态、以及在软件中编写控制程序。
八、完成全部设置以后,依次将PLC、机器人下载。
按以上设置的话,PLC侧的I0.0能直接控制机器人侧的IN201,机器人的OUT201可以直接控制PLC侧的Q0.0.
以上完成机器人作为从站、PLC作为主站的ProfiBus通讯设置。
KUKA工业机器人与S7-1200PLC实现Profinet通讯的步骤本次内容来简单谈一谈KUKA工业机器人与S7-1200PLC实现Profinet通讯的步骤。
步骤1:完成硬件接线
网线一端连接至控制柜门上的KLI端口,另一端连接到交换机,PLC也连接到交换机(交换机无型号要求),交换机再连接到电脑。
具体接线方式如下示意图:
步骤2:将编程电脑、PLC、KUKA设置成同一个网段(因KUKA的底层设置原因,最好不更改机器人IP地址)
(1)在博途软件中新建项目,并添加新设备,就是添加一个S7-1200型PLC
(2)点击选项—添加设备描述文件—导入KUKA机器人的GSD文件,这个GSD文件可以在KUKA机器人的示教器存储目录中找到,也可以私信找电气技术微课堂小编索要。
(3)安装GSD,并把KUKA设备进行组态
(4)设置好以上后(包括PLC地址),接下来就可以编译下载到PLC。
下载完成后PLC 会报红灯,是因为下一级组件存在故障,即还没有设置机器人端,连接不到下一级组件,所以报错。
也可以使用此方法判断是否连接成功。
步骤3:WorkVisual对KUKA进行设置
步骤4:激活、添加Profinet、DTM选择Profinet,详细设置过程如下图
步骤5:双击Profinet进行设置。


ABB机器人与S7-1200PLCprofinet通信一. 所需硬件笔记本一台(装好博图V15)ABB机器人一台(带profinet选项,带GSD文件包)1200PLC一台网线3条交换机1台准备好硬件以后用网线将PLC,机器人,交换机,电脑连接起来如下图:二. PLC端操作如下1.打开博图V15组态画面拖入一台1200PLC2.点击PLC的网口设置IP地址如图192.168.10.13.安装ABB机器人GSD文件(1工具,2选项,3管理通用站文件描述,4选择GSD文件所在位置5安装)4.添加机器人设备(1其他现场设,2profinet IO,3 I/O, 4ABBROBOTICS,5robot device,6basic v1.3 7拖入网络视图)5.将PLC和机器人的网口用线连接起来。
6.双击机器人设备网口将机器人的IP设置为plc的同一网段7.并配置发送与接收数据包,这里选择发8个字节,收8个字节。
8.查看映射地址图映射地址为PLC端的IB100到IB107 对应机器人端的QB256到QB263机器人端的IB256到IB263 对应PLC端的QB100到QB1079.编写PLC端的发送和接收程序。
将PLC端IW100发送到机器人的QW256PLC端IW102发送到机器人的QW258将机器人端发送过来的数据会接收在QB100里面,到此PLC端设置已经全部完成。
三、机器人端设置如下:1:设置IP地址;控制面板,配置,主题,communication,IP setting,显示全部,ProfiNet work,编辑,设置对应IP地址192.168.10.22:建立通讯板卡添加PN从站控制面板,配置,主题,I/O,PROFINET Internal device ,显示全部,添加,使用来自模板的值,选择PN-internal-device,input size 修改值为8(一个字节),output size 修改值为8(一个字节),确定。

PROFINET总线通信-S7-1200 PLC作IO控制器与ET 200SP通信一、总线通信简介S7-1200 PLC中央机架最大扩展8个数字量和模拟量模块,如果超过该数量可通过PROFIBUS或PROFINET扩展分布式I/O系统,将过程信号连接到S7-1200 PLC控制器。
西门子分布式I/O系统SIMATIC ET200具有丰富的产品线,常用的模块包括SIMATIC ET 200SP、SIMATIC ET 200MP、SIMATIC ET 200M 和SIMATIC ET 200S等。
ET 200分布式系统是自动化系统的基础,现场层的各个组件和相应的分布式设备通过PROFINET、PROFIBUS和上层的PLC实现快速的数据交换,是PLC系统的重要组成部分。
开放的PROFINET和PROFIBUS通信标准,给自动化系统带来灵活的连接方式。
二、 PROFINET简介PROFINET是开放、标准、实时的工业以太网标准。
尽管工业以太网和标准以太网组件可以一起使用,但工业以太网设备更加稳定可靠,因此更适合于工业环境(温度、抗干扰等)。
作为PROFINET的一部分,PROFINET IO是用于实现模块化、分布式应用的通信概念。
PROFINET IO分为IO控制器、IO设备、IO监控器。
IO控制器通常是运行自动化程序的控制器,IO设备指分配给其中一个IO控制器的分布式现场设备(例如远程IO、变频器),IO监控器指用于调试和诊断的编程设备、PC或HMI设备。
三、S7-1200 PLC作IO控制器与ET 200SP通信西门子S7-1200 PLC使用PROFINET通信时,一个作为PROFINET IO控制器,一个作为PROFINET IO设备。
一个PROFINET IO控制器可以最多支持16个PROFINET IO设备。
PROFINET通信不使用通信指令,只需要配置好数据传输地址,就能够实现数据的交互。

1,(1)按下图接好X11端子,短接好相关接线端
(2)按下图接好X11端子,短接好相关接线端;
在文件
中找到P148页
2,提示报警,在控制柜里面检查有一条电源线没有插
3,在机器人示教器上查找机器人IP地址,然后设置电脑本地连接的IP,
让软件与机器人通讯连接起来(查瞧连接状态:CMD—PING_IP地址) 4,通过软件从机器人控制柜中读取配置
然后将读取的项目“另存与”一个指定的文件夹。
5,关闭读取的项目,如图
在中插入GSD文件
如
需要把外挂的I/O模块配置好
6,打开读取的项目中, 如图,
然后双击“”会出现“”控制器被激活。
7,先配置EL1809输入部分。
IN[1]到IN[16]对应16点输入
后配置EL2809输出部分。
OUT[1]到OUT[16]对应16点输出;
8,在依次配置EL6731-0010输入输出
注意把8位编组为一个字节,一次编组,从IN[17]与OUT [17]开始,最后连接起来。
9,下载项目
在下载过程中若出现下载报警,可以在示教器上激活要下载的项目即可
10,设置PROFIBUS地址
双击,然后填写地址
然后点击APPLY,OK
11,在中添加8个字节,即4个字的输入/输出12在PLC中配置网络及地址,
当机器人与PLC通讯正常后,建立变量表
在示教器上可以监视强制相关数字信号,还可以在示教器上强制OUT[1]-OUT[16]会发现EL1809模块亮灯;。
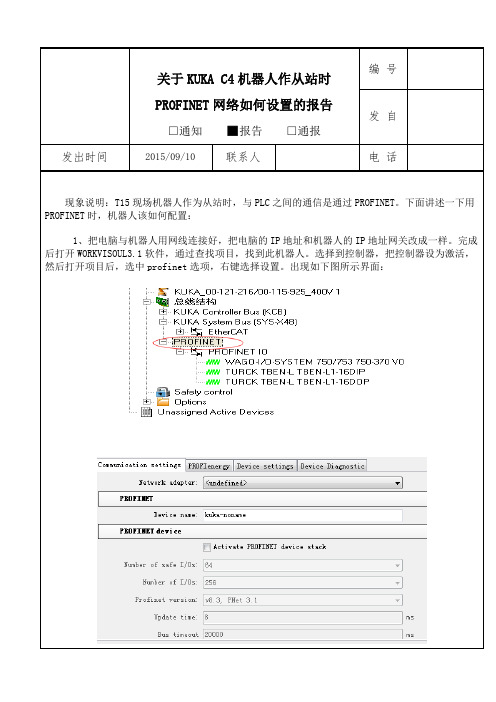
关于KUKA C4机器人作从站时PROFINET网络如何设置的报告□通知■报告□通报编号发自发出时间2015/09/10 联系人电话现象说明:T15现场机器人作为从站时,与PLC之间的通信是通过PROFINET。
下面讲述一下用PROFINET时,机器人该如何配置:1、把电脑与机器人用网线连接好,把电脑的IP地址和机器人的IP地址网关改成一样。
完成后打开WORKVISOUL3.1软件,通过查找项目,找到此机器人。
选择到控制器,把控制器设为激活,然后打开项目后,选中profinet选项,右键选择设置。
出现如下图所示界面:2、第一步完成后,开始设置参数是机器人主机网卡型号;是安全信号分配的字节;是与PLC交互信号分配的字节;与PLC相同;此项是系统默认值,一般无须设置;这几项也是系统默认值,一般不需要设置3、上一步完成后,选择,右键选择连接。
完成后点击开始进行I/O地址映射。
输入输出映射方法相同,下面已输入为例,讲述如何进行IO映射。
映射时先点击下图右侧的现场总线然后选择输入,根据前面设定的进行选择输入信号的数量,如果前面选择的是128,那么这里也选择128.信号数量选好以后,开始对左侧进行选择。
先点击数字输入信号,然后分配数量,左右两侧信号数量可以保持一致,也可以左侧比右侧多,但一定不能比右侧少。
两边信号分配完以后,把两边分配的信号全部选中点击按钮,然后点击保存和按钮,上传到机器人即可。
总结:1、PROFINET设置时一定要选64,如果选择0,则无法运行外部自动功能,即使与PLC的通讯连接正常无出错。
2、点地址映射的时候点击PORFINET文件夹,不要点击文件夹里面的文件。
3、安全信号机器人这边不需要配置,PLC进行分配。
拟文部门领导分管领导管控/执行财务总监总经理部门主报:主发:。